(sinopse)
Aula 09
“Observabilidade”
Extraído do texto manuscrito cujo título é “Teoria de Controle”,
http://webx.ubi.pt/~felippe/main_pgs/mat_didp.htm, escrito
originalmente em 1984 mas com observações, exemplos e exercícios
acrescentados nos últimos anos.
J. A. M. Felippe de Souza
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
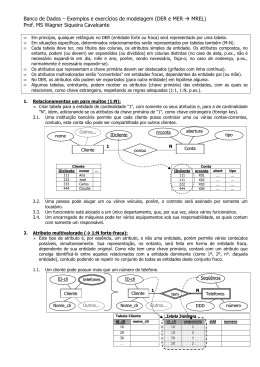
X = Espaço
de estados
(State space)
xo
Y = Espaço das
funções de saída
(output functions)
y(t)
Isto é, todos os estados são ‘distinguíveis’, ou seja, o estado inicial
xo∈X do sistema, qualquer que ele seja, pode ser identificado
através da saída y(t) do sistema.
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
C
CA
V = CA
⋮
CA
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
ou seja,
O sistema é observável se, e somente se,
C
CA
rank CA
⋮
CA
V
= n
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Controlabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Exemplo: Considere o sistema de segunda ordem
A
B
2 0
1
x& =
x + u
− 1 1
1
y = [1 1] x
n=2
x01
x(0) = xo =
x02
R2
C
Teste de observabilidade (condição do rank):
rank
C
CA
espaço de
estados
1 1
= rank
= 1 ≠ 2 = n
1 1
0
Logo, o sistema NÃO é observável, não se pode identificar o
estado inicial deste sistema para qualquer estado x0 ∈ espaço de
estados R2. Vamos então achar o “Subespaço não-observável”
.
Controlabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Usando a eq. (4.10),
e2t
x(t) =
et − e2t
0 x01
⋅
et x02
+
e x01
+
=
et − e2t x01 + et x02
∫
t
e A( t−τ) ⋅ B⋅ u(τ) ⋅ dτ =
0
=0
2t
(
)
e2t x01
=
et x01 − e2t x01 + et x02
∫
t
0
0 ⋅ dτ =
Controlabilidade
______________________________________________________________________________________________________________________________________________________________________________________
x(t)
C
logo,
y(t) = [ 1
e 2t x01
=
1 ]⋅
e t x01 − e 2t x01 + e t x02
= e t x01 + e t x02 =
= e t ( x01 + x02
)
Portanto o “Subespaço não-observável” é
= { x = (x01, x02) ∈ R2 : x01 = -x0}.
Controlabilidade
______________________________________________________________________________________________________________________________________________________________________________________
= { x = (x01, x02) ∈ R2 : x01 = -x02 }.
Subespaço
Não observável
Controlabilidade
______________________________________________________________________________________________________________________________________________________________________________________
Observe também que como a saída
y(t) = e t ( x01 + x02
)
então, quaisquer 2 estados x0 e x0’ cuja soma das suas componentes
x01 e x02
sejam as mesmas, são indistinguíveis.
Por exemplo, os estados x0 e
x0’
7
xo =
− 2
− 5
x 'o =
10
e
são indistinguíveis. Além disso, a diferença (x0
não observável
(x
o
− x 'o
)
=
- x0’) é um estado
12
∈
− 12
Obrigado!
Felippe de Souza
[email protected]
Baixar