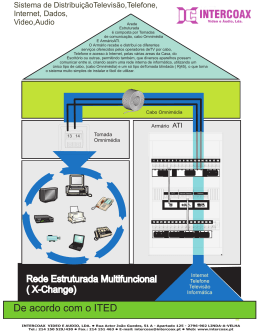
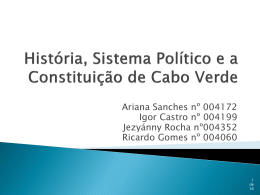
Carlos Silva/João Constantino Autores: Carlos Silva, João Constantino Data: 08/01/2004 08-01-2004 Página 1 Carlos Silva/João Constantino Índice 08-01-2004 Página 2 Controladores Dispositivos em PC ................................................................................ 5 Esquemas de Codificação (Encoding Schemes)......................................................... 6 Interfaces de Disco (Disk Interfaces)......................................................................... 6 História do Desenvolvimento de Interfaces ............................................................... 6 Controladores de Disco ............................................................................................. 7 O Interface ST506/412 .............................................................................................. 7 Características do Interface: .................................................................................. 8 Encoding – Encoding era feito numa carta controladora separada.......................... 8 Cabos e conectores................................................................................................ 8 Enhanced Small-Device Interface (EDSI) ................................................................. 8 Alterações na interface EDSI................................................................................. 9 Cabos e Conectores ............................................................................................... 9 Interface Integrated Drive Electronics (IDE): ............................................................ 9 Cabos e Conectores ............................................................................................. 10 CONECTORES .................................................................................................. 11 Capacidade dos drives IDE.................................................................................. 11 Velocidade de acesso .......................................................................................... 12 Drives SCSI ............................................................................................................ 12 Os circuitos de controlo....................................................................................... 12 SCSI Host Adapters ............................................................................................ 12 Disco SCSI ......................................................................................................... 13 SCSI Termination ............................................................................................... 13 Tipos de SCSI ..................................................................................................... 13 Drive Select Jumpers........................................................................................... 13 Conecções........................................................................................................... 14 Vantagens dos dispositivos SCSI:........................................................................ 14 Placas de Vídeo (Vídeo Cards).................................................................................... 15 Placas de Vídeo Standard (VIDEO CARDS STANDARDS)................................... 15 MDA (Hercules) ................................................................................................. 15 CGA ................................................................................................................... 15 EGA.................................................................................................................... 16 PGA.................................................................................................................... 16 MCGA ................................................................................................................ 16 8514/A ................................................................................................................ 17 VGA ................................................................................................................... 17 SVGA ................................................................................................................. 18 Conclusão ........................................................................................................... 18 Comunicação de dados................................................................................................ 19 Sinais analógicos e digitais...................................................................................... 19 Bits e caracteres ...................................................................................................... 19 Transmissão paralela e série .................................................................................... 20 Transmissão série assíncrona............................................................................... 21 Transmissão série síncrona.................................................................................. 21 Sentidos de transmissão....................................................................................... 22 Circuitos dedicados ................................................................................................. 22 Circuitos dedicados ponto-a-ponto e ponto-multiponto........................................ 23 Circuitos comutados................................................................................................ 23 Comutação de pacotes ......................................................................................... 24 Sistemas de comunicações .......................................................................................... 24 Carlos Silva/João Constantino 08-01-2004 Página 3 Introdução............................................................................................................... 24 Modelo de referência OSI ....................................................................................... 26 Camada 1 – (camada física)................................................................................. 27 Camada 2 – (camada de ligação de dados)........................................................... 28 Camada 3 – (camada de rede).............................................................................. 28 Camada 4 – (camada de transporte) ..................................................................... 28 Camada 5 – (camada de sessão)........................................................................... 28 Camada 6 – (camada de apresentação) ................................................................ 28 Camada 7 – (camada de aplicação)...................................................................... 28 Serviços e pontos de acesso aos serviços ................................................................. 28 Protocolos de nível e unidades de dados.................................................................. 29 LAN, MAN e WAN.................................................................................................... 30 Origem e evolução das redes ................................................................................... 30 Conceito de LAN, WAN, MAN e VAN .................................................................. 31 Topologias de redes de área local (LANs) ............................................................... 32 Suportes de transmissão .......................................................................................... 34 Cabo coaxial ....................................................................................................... 34 Cabo de pares simétricos ..................................................................................... 35 Fibra óptica ......................................................................................................... 35 Interfaces ar (sem fios) ........................................................................................ 36 Cablagem estruturada para LANs............................................................................ 36 Métodos de acesso ao meio partilhado..................................................................... 37 CSMA (Carrier Sense Multiple Access) .............................................................. 38 Passagem de testemunho (Token)........................................................................ 38 Tecnologias de rede ................................................................................................ 38 ISO 8802-3 – Ethernet......................................................................................... 40 ISO 8802-4 – Token Bus..................................................................................... 41 ISO 8802-5 – Token Ring ................................................................................... 41 IEEE 802-11 – Wireless LAN ............................................................................. 42 ISO 9314 – FDDI ................................................................................................ 43 Componentes de rede e equipamentos de interligação ............................................. 44 Repetidores ......................................................................................................... 44 Concentradores (hubs)......................................................................................... 44 Pontes (bridges) .................................................................................................. 45 Comutadores (switchs) ........................................................................................ 46 Encaminhadores (routers).................................................................................... 47 Gateways ............................................................................................................ 47 Carlos Silva/João Constantino 08-01-2004 Página 4 Índice de Figuras Figura 1 - SCSI ........................................................................................................... 14 Figura 2- Sinais analógicos vs Sinais digitais .............................................................. 19 Figura 3 - Transmissão paralela................................................................................... 20 Figura 4 - Transmissão série ....................................................................................... 20 Figura 5 - Transmissão série assíncrona ...................................................................... 21 Figura 6 - Transmissão série síncrona ......................................................................... 22 Figura 7 - Transmissão simplex e half-duplex ............................................................. 22 Figura 8 - Transmissão full-duplex............................................................................. 22 Figura 9 - Circuitos dedicados ponto-a-ponto e ponto-multiponto ............................... 23 Figura 10 - Comutação por pacotes ............................................................................. 24 Figura 11 - Modelo um sistema de comunicação ......................................................... 25 Figura 12 - Sistemas intermédios ................................................................................ 26 Figura 13 - Modelo OSI e funções por camada............................................................ 27 Figura 14 - Utilizadores e fornecedores de um serviço ................................................ 29 Figura 15 - Encapsulamento e desencapsulamento no modelo OSI.............................. 30 Figura 16 - Conceito de LAN, MAN e WAN .............................................................. 32 Figura 17 - Topologias em Bus, Anel e Estrela............................................................ 34 Figura 18 - Cablagem estruturada................................................................................ 37 Figura 19 - ISO 8802 - Camadas protocolares ............................................................. 39 Figura 20 - Modelo OSI vs. Modelo ISO 8802 ............................................................ 39 Figura 21 - Constituição do endereço físico (MAC Adress)......................................... 40 Figura 22 - ISO 8802 - Estrutura das PDUs................................................................. 40 Figura 23 - Variantes Ethernet .................................................................................... 41 Figura 24 - Frequency Hopping................................................................................... 43 Figura 25 - Time Hopping........................................................................................... 43 Figura 26 - Mapeamento da função repetidor no modelo OSI...................................... 44 Figura 27 - Topologia de cabo directo e cruzado ......................................................... 45 Figura 28 - Mapeamento da função ponte no modelo OSI ........................................... 46 Figura 29 - Mapeamento da função router no modelo OSI........................................... 47 Figura 30 - Mapeamento da função gateway no modelo OSI ....................................... 48 Carlos Silva/João Constantino 08-01-2004 Página 5 Objectivos Apresentar uma monografia, onde seja apresentada uma análise exaustiva aos pontos: • • • Estudo dos Controladores de disco Estudo da evolução das Placa de Vídeo Redes de Computadores Carlos Silva/João Constantino 08-01-2004 Página 6 Controladores Dispositivos em PC Qualquer dispositivo num computador tem um dispositivo controlador, integrado na motherboard ou inserido numa ranhura de expansão, na forma de uma carta de PC. Muitos PC têm os controladores de dispositivos como discos IDE, impressoras, etc., integrados na motherboard. Um cabo eléctrico (normalmente um cabo plano (flat), paralelo (ribbon) que conecta os dispositivos ao controlador. Cada tipo de dispositivo utiliza o seu esquema de “encoding”. Esquemas de Codificação (Encoding Schemes) – Ao ler um disco rígido, a cabeça de leitura pode apenas detectar variações do campo magnético ou inversões de fluxo. Um codificador/descodificador (encoder/decoder) converte sinais digitais recebidos do data bus num sinal “waveform” que coloca estas inversões de fluxo na superfície do disco. O processo é invertido durante a leitura de dados. Alguns dos métodos mais antigos utilizados para codificar e descodificar informação num disco são: • • • Modified Frequency Modulation. RLL – Run Length Limited ARLL – Advanced Run Length Limited Interfaces de Disco (Disk Interfaces) No contexto da recuperação de dados, ajuda conhecer um pouco acerca do tipo de interface utilizado, até porque alguns problemas que se colocam na recuperação de dados são resultado directo da configuração e instalação do drive. O papel principal do controlador de disco é transmitir, receber e interpretar os dados enviados para e recebidos do disco rígido (o tipo de interface utilizado num sistema tem impacto directo na performance global do sistema). Para que o computador entenda os dados gravados num disco rígido, a interface deve ser capaz de descodificar o fluxo de sinais em informação útil. • • Os circuitos electrónicos de uma interface de um drive amplificam e descodificam estes sinais em sinais digitais utilizados pelo computador para representar dados O método utilizado para codificar ou descodificar sinais varia, dependendo do tipo de drive. Diferentes esquemas de codificação utilizam diferentes combinações interface do disco / controlador. História do Desenvolvimento de Interfaces Nos últimos anos assistimos ao desenvolvimento de quarto (principais) configurações de interfaces de disco. O tipo de interface utilizada determina quão rápida pode ser a transferência de dados entre o disco e a memória principal. Carlos Silva/João Constantino 08-01-2004 Página 7 Cada interface exige uma instalação e configuração específica. Podem ocorrer problemas quando se tentam adicionar dois ou mais drives a um sistema. Principalmente quando se utilizam diferentes tipos de interfaces de disco. • • • • • Seagate ST506/412 interface Enhanced Small-Device Interface (EDSI) Integrated Drive Electronics (IDE) Interface Small Computer System Interface (SCSI) Controllers Enhanced IDE Controllers O tipo de controladores listado acima controla principalmente a interface de dispositivos de armazenamento com o bus da motherboard, tais como ISA, EISA ou mesmo PCI. Existem outros tipos de controladores em chips no computador, que podemos desconhecer e até não conseguir ver. Por exemplo, controlador de memória, controlador VL Bus, controlador PCI bus. Algumas cartas de expansão incorporam também a função de controlador, embora desempenhem também outras funções. Um exemplo é a placa de vídeo, um uma carta de aceleradora de vídeo. Controladores de Disco O Interface ST506/412 Nos primeiros anos após o aparecimento dos computadores (1978-1983) a IBM decidiu apostar na utilização de interfaces standard para os seus sistemas. Consequentemente, a interface ST506/412 foi uma das primeiras interfaces utilizadas pelo computador IBM-XT. Introduzido em 1980 pela Seagate Technologies, a interface ST506/412 foi primeiramente utilizada com o drive ST506. Este drive, de 5 ¼ polegadas, tinha uma capacidade, após formatação, de 5MB. Pelos standards actuais seria considerado um “dinossauro”. • • • Em 1981 a Seagate desenvolveu o drive ST-412, com um melhoramento, “buffered seek”, para a interface. Este drive tinha uma capacidade total, após formatação, de 10 MB. Em 1983 a IBM adicionou o “ROM BIOS Support” ao interface ST506/412, para a versão actual, da altura, dos sistemas XT. Nessa época as motherboards não dispunham de suporte para discos rígidos. Também em 1983, quando a IBM introduziu o formato AT, o suporte ST506/412 foi adicionado à ROM BIOS localizada na motherboard. Desde então, qualquer computador, compatível com o sistema IBM, tem uma versão melhorada da interface ST506/412 integrada na ROM BIOS da motherboard. Carlos Silva/João Constantino 08-01-2004 Página 8 Características do Interface: Encoding – Encoding era feito numa carta controladora separada. • • MFM Coding – o esquema original de “encoding” era o Modified Frequency Modulation, ou MFM. Este método comprimia a informação num disco de forma mais eficiente (ocupando menos espaço) o que permitiu tamanhos de disco de 5 até 100MB. Este método procura informação no disco bit a bit (um bit de cada vez). A velocidade de transferência do ST506 com MFM é de 650Kbytes/Seg. RLL Coding – À medida que o tamanho dos programas aumentava a necessidade de maiores discos, discos de maior capacidade, tornou-se evidente. Um novo esquema de “encoding”, chamado Run Length Limited foi desenvolvido, permitindo um “empacotamento” de dados num disco de forma ainda mais comprimida. A maior diferença entre MFM e RLL é a de que o método RLL procura a informação do disco em blocos de 16 bits. Isto permitiu um tipo de compressão capaz de armazenar mais 50% de dados num disco rígido. O problema é que, com o método RLL, é necessária uma superfície de disco e o timing é mais crítico. A velocidade de transferência do ST506 com RLL é de 973K bytes/Seg. O método RLL ainda hoje é utilizado em drives ESDI, SCSI e IDE. Cabos e conectores • • • • Jumpers Drive Select – estão localizados no disco rígido e estão numerados 0-3 ou 1-4. Se são instalados dois drives no sistema e um cabo “twisted” é utilizado, ambos os drives devem ter o jumper para o segundo disco seleccionado. Será o pino 1 ou o pino 2, dependendo da marcação no jumper. Um cabo de 20 pinos é necessário para cada drive. Terminating Resisters – O drive conectado no fim do cabo de dados (drive C:) deve ter o “termination resister” instalado. O segundo drive deve ter o “termination resister” removido. Cabos – Dois drives são conectados num único controlador por dois ou três cabos. Um único cabo de 34 pinos é utilizado para ambos os drives. Alguns conectores estão marcados no extremo em que são conectados ao controlador. Os sinais de controlo do drive são invertidos no cabo, trocando (twisting) cinco dos condutores entre os dois conectores dos drives (tal como nos cabos dos floppy disk, excepto que neste caso são sete os condutores trocados) Enhanced Small-Device Interface (EDSI) ESDI foi inicialmente introduzido em 1983 pela Maxtor Corporation. Esta interface foi desenvolvida como um standard de alta performance para suceder ao ST506/412. A interface ESDI foi utilizada extensivamente em sistemas de topo porque a sua velocidade de transferência era superior e suportava discos Carlos Silva/João Constantino 08-01-2004 Página 9 rígidos de maior capacidade. Este tipo de interface exigia um controlador diferente do ST506/412. Enquanto transfere dados do disco rígido para o controlador um “pulse code” que não necessita “retorno a zero” é utilizado, ao contrário do que sucede no ST506. Este método é conhecido como interface Non Return to Zero (NRZ). Alterações na interface EDSI • • Alguns dos componentes electrónicos forma movidos da carta controladora do drive para o circuito existente no disco rígido. A velocidade de transferência de dados aumentou par 1 a 3 MB, com uma capacidade máxima de armazenamento de 80MB até 2GB. Cabos e Conectores A interface ESDI utiliza os mesmos cabos que a ST506. Contudo não se podem misturar os dois tipos de drives no mesmo cabo. Dois drives são conectados a um único controlador através de um cabo controlador de 34 pinos. Cada drive terá o seu próprio cabo de dados. O pino 1 deve estar alinhado ao longo de toda a cadeia de cabos. Alguns conectores estão marcados de forma explícita. • • Cabo de 20 Pinos – um cabo de dados de 20 pinos é necessário para cada drive Cabo do Drive – O cabo controlador do drive é de 34 pinos. Há três configurações possíveis para este cabo: o Um único Drive – um único cabo de 34 pinos, sem cruzamento de condutores e um único conector para um drive. O drive é configurado para primeiro drive seleccionado (first drive select). o Drive duplo – (sem cruzamentos) um cabo de 34 pinos, sem cruzamento de condutores. Dois conectores de drive para dois drives (C e D). Jumpers (Drive selects) são utilizados para identificar cada um dos drives. o Drive duplo (Twist) – Um cabo de 34 pinos com as linhas (os condutores) “drive select” cruzadas, de forma semelhante ao cabo utilizado com a interface ST506. Interface Integrated Drive Electronics (IDE): A designação Integrated Drive Electronics (IDE) surgiu um 1986, quando a Compac Corporation, Western Digital, e a divisão Magnetic Peripherals, da Control Data Corporation trabalharam em conjunto para integrar um chip controlador Western Digital num disco rígido. Em 1988, um grupo chamado Common Access Method (CAM) foi formado e desenvolveu um standard, submetido ao American Standards Institute em Carlos Silva/João Constantino 08-01-2004 Página 10 Novembro de 1990. Este standard foi aprovado em 1991 com a designação AT, hoje chamado um standard IDE. Integrated Drive Electronics é um dos termos mais erroneamente utilizados em informática. IDE é a designação genérica para qualquer drive com o controlador integrado nos circuitos do disco rígido. • • • • • Os primeiros drives IDE eram “hard cards”. Muitos dos drives hoje chamados “IDE” são na realidade IDE/ATA. ATA significa “AT attachment” porque são ligados através do bus, barramento, IBM AT. Combinando o disco e o controlador o produtor pode optimizar a construção dos drives e melhorar o seu desempenho. A ligação directa ao bus permite um melhor fluxo pela utilização de um caminho mais largo, paralelo (40 pinos). As interfaces ST506 e ESDI utilizam uma interface série. O drive IDE transfere apenas dados. Não necessita enviar sector e informação sobre o formato, como acontece com a interface ESDI. Como resultado a velocidade de transferência é 3 a 4 vezes mais rápida que num drive ESDI. O drive ESDI não funciona como sendo a interface “device level”. O drive tem a capacidade de “mentir” à BIOS do sistema e fazer-se passar, a nível lógico, como sendo de um tipo conhecido, mesmo quando na realidade é fisicamente diferente do tipo conhecido. Alguns drives construídos antes das especificações CAM-ATA têm denotado problemas ao comunicar com drives construídos após 1989. Cabos e Conectores A interface IDE/ATA utiliza um subconjunto de 40 pinos, do standard ISA bus, de 80 pinos. Os pinos normalmente necessários para os controladores XT ou AT são os únicos pinos utilizados. A interface é conseguida utilizando: • • Um conector de 40 pinos na motherboard, que conecta ao A bus Um conector de 40 pinos numa carta de expansão, que se conecta num bus ISA. O comprimento do cabo não pode exceder 2 pés. Podem ser instalados dois ou quatro drives IDE num barramento ISA standard, dependendo do tipo de motherboard ou controlador de disco utilizado. Para evitar um potencial conflito entre drives, um dos drives é designado como sendo o “master” e o outro como sendo o “slave”. Tanto o master como o slave podem ser conectados a qualquer dos conectores. A configuração como master ou slave é feita através dos jumpers situados na parte electrónica do disco. Os “termination resistors” não são necessários num drive IDE. Carlos Silva/João Constantino 08-01-2004 Página 11 O design Integrated Drive Electronics (IDE) é o nome para o design AT Attachment, e o drive IDE tem o controlador embutido no próprio drive. Ainda assim, um IDE pode conectar-se ao bus da motherboard ou a uma carta de expansão num slot ISA ou PCI. O custo de produzir uma motherboard com os conectores IDE embutidos é menor do que seria colocando um controlador adicional num slot de expansão. Consequentemente a maioria das motherboards disponíveis hoje tem múltiplos conectores IDE embutidos. CONECTORES A maioria das motherboards modernas tem dois conectores IDE (um primário e um secunda rio), bem como a opção “auto-detect” para boards IDE. Um conector IDE é um conector “plug-in” de 40 pinos, É possível ligar apenas dois discos num único cabo IDE. A maioria das motherboards tem dois conectores de 40 pinos, tal como o têm a maioria das cartas de expansão IDE. Assim, numa motherboard com um interface IDE integrado, normalmente encontramos três conjuntos de pinos conectores. Para ligar drive de disquetes, discos rígidos, drives CD-ROM, etc. Contudo, se desejarmos adicionar mais drives, do tipo IDE, é possível acrescentar um controlador adicional e colocá-lo num slot de expansão, o que permite conectar mais dois cabos adicionais para mais 4 dispositivos. Algumas motherboards têm os conectores IDE conectados a um VESA Local Bus, referenciados como “VESA IDE” e “VESA ISA” e têm um conjunto de conectores sem qualquer referência. Os discos rígidos são conectados ao conector com a referência “VESA IDE”, o drive de disquetes ao conector sem referência e o CD-ROM ao conector referenciado como “VESA ISA”. Um conector permite no máximo a conexão a dois dispositivos. O cabo que conecta os dispositivos é um “flat ribbon cable” com 3 conectores de 40 pinos. Num dos extremos, o que tem os conectores mais próximos, conecta os dispositivos e no outro extreme conecta com o conector IDE na motherboard. Um dos lados do cabo tem uma tira vermelha, que indica como o cabo deve ser ligado, fazendo corresponder o lado com esta marca ao pino 1 dos dispositivos e ao pino 1 no conector na motherboard. Capacidade dos drives IDE As limitações ATA iniciais permitiam um endereçamento máximo de 528 Mbytes, o que ainda hoje é uma limitação em computadores com BIOS anteriores a 1991. Carlos Silva/João Constantino 08-01-2004 Página 12 Velocidade de acesso Os dispositivos IDE, “puros”, são algo lentos, normalmente com ciclos de 8 MHz, uma interface AT de 8 bits pode transferir informação a 4 Mbytes/Seg. Num formato de 16 bit pode mover até 8 Mbytes/seg. A ligação de um CD-ROM a um interface IDE foi conseguida devida à ATAPI, Attachment Packet Interface, introduzida cerca de 1993. Drives SCSI SCSI, Small Computer System Interface (lê-se “scuzzy”) foi desenvolvido mais ou menos ao mesmo tempo que a interface ESDI. Inicialmente foi utilizado pela Apple Computers nos seus computadores Macintosh. A interface SCSI não é um controlador de disco, mas sim um completo barramento de expansão externo. Este barramento permite até oito dispositivos conectados em paralelo a uma carta SCSI Host Adapter. Cada carta, adaptador host SCSI, encaixa num slot de expansão na motherboard. Cada dispositivo ligado ao bus SCSI é ligado em cadeia (daisy-chained) num cabo de 50 pinos que contém oito conectores. Isto permite que até sete dispositivos sejam conectados a esse cabo e este conectado à carta de expansão. Nota: os dispositivos SCSI internos podem utilizar o mesmo cabo, mas dispositivos externos necessitam um cabo separado por cada dispositivo. Os circuitos de controlo Os circuitos de controlo são chamados os Host Adapter. O Host adapter Tanto pode integrado no primeiro dispositivo da cadeia como estar separado num carta de expansão montada num slot de expansão do computador. Uma vez que a interface SCSI é considerado um barramento do sistema, um extremo do cabo é ligado ao Host Adapter e todos os dispositivos lógicos SCSI são conectados ao cabo SCSI bus. SCSI Host Adapters O SCSI Host Adapter pode operar muitos diferentes tipos de periféricos, que incluem: • • • • • Unidades Tape Back-up Floppy Drives Discos rígidos Scanners Drives Cd-rom. Carlos Silva/João Constantino 08-01-2004 Página 13 Disco SCSI Na realidade o disco SCSI é um drive IDE configurado para o barramento SCSI. A configuração de um drive SCSI é consideravelmente diferente da dos drives IDE. SCSI Termination A cadeia SCSI ter que ser terminada nos dois extremos. Um “termination resistor” é colocado no host adapter e no último dispositivo da cadeia. Isto é imprescindível. Tipos de SCSI Há várias versões do bus SCSI. • • • • SCSI One – o A versão mais antiga das especificações SCSI o Até 4 host adapters no sistema o Sete dispositivos por adaptador o “data path” de 8 Bit o Taxa de transferência do bus 5 megabyte/segundo no bus SCSI Two – Adicionou às especificações SCSI One o Até 32 host adapters por sistema. o Novos comandos o Command Queuing, fila de comandos. o Cabos conectores de alta densidade (High-Density cable connectors). o Taxa de transferência de 10 megabyte/Segundo no bus o “Active termination” melhorada. o Variações – Fast ou Wide SCSI. o Data path de 16 bit. Wide SCSI – Permite transferência de dados em bus de largura 16 ou 32 bit. Utiliza o cabo standard 8 bit 50 pinos mais um cabo adicional de 68 pinos (B Cable). Fast SCSI – Adicionou a capacidade de transferência síncrona, a alta velocidade em blocos. Como resultado, o Fast SCSI proporciona uma velocidade de transferência de 10 Mbyte sobre um interface de 8 bit SCSI II. Quando combinado com o 16 ou 32 data path do wide SCSI resulta em velocidade de transferência de 20 a 40 MBytes por segundo. Drive Select Jumpers Como em qualquer sistema SCSI é necessário distinguir a diferença entre dispositivos e determinar cada drive (drive id’s). Isto é feito configurando um padrão binário utilizando um conjunto de 3 jumpers. Cada dispositivo conectado ao barramento SCSI tem de ter um único endereço. Ao host adapter é sempre atribuído o endereço 07. O primeiro Carlos Silva/João Constantino 08-01-2004 Página 14 dispositivo de boot na cadeia (disco rígido) tem que ter o endereço 00. Há normalmente 8 possíveis endereços, como indicado: • • Para configurar dispositivos: 00 a 06 Para SCSI Host Adapter: 07 Conecções Um cabo de 50 pinos é utilizado para conectar a maioria dos dispositivos SCSI. O comprimento máximo do cabo é de 18 pés, com excepção do cabo Fast/Wide SCSI, que pode ter até 36 pés. Vantagens dos dispositivos SCSI: 1. Mais dispositivos podem ser conectados num único cabo (7) do que podem num controlador IDE (2). 2. Cada drive SCSI tem o seu próprio controlador de disco integrado, que pode funcionar de forma independente do CPU do sistema. Figura 1 - SCSI Carlos Silva/João Constantino 08-01-2004 Página 15 Placas de Vídeo (Vídeo Cards) A placa de vídeo controla a qualidade do que vemos no monitor. Contem todos os circuitos necessários para permitir a visualização de gráficos. Normalmente consiste de uma carta separada colocada num slot de expansão, mas por vezes pode Ester integrada na motherboard. É importante que a placa de vídeo esteja de acordo com o tipo de monitor utilizado. Placas de Vídeo Standard (VIDEO CARDS STANDARDS) No decurso do desenvolvimento dos PC tem havido uma variedade (e competição) entre diversos tipos de standards de placas de vídeo em desenvolvimento. Desde que a Vídeo Electronics Standard Association (VESA) surgiu com as especificações SVGA, não tem havido muitas alterações nesta área. São boas notícias para os consumidores, uma vez que não têm que se preocupar com a aquisição de hardware para suportar determinados standards de vídeo, o que acontecia antes do aparecimento do SVGA, tal como se descreve em seguida. MDA (Hercules) Monochrome Display Adapter, ou MDA, surgiu em 1981 e é o mais antigo de vídeo para PC. Este era o original adaptador de vídeo do IBM PC. Tecnicamente era um sistema baseado em caracteres (character mapped), o que significa que apenas era capaz de representar 256 caracteres no monitor. Funcionava apenas em modo texto, e era monocromático. O texto podia ser representado em 25 linhas de 80 colunas e cada carácter era de um tamanho predefinido. Não era capaz de controlar pixeis, dai não ser possível representar gráficos. Era ideal para aplicações baseadas em DOS, por exemplo, processadores de texto. Como extra a IBM incluía uma porta paralela permitindo assim disponibilizar um slot de expansão. CGA Alguns meses após o lançamento do MDA, apareceu o adaptador CGA. Funcionava com um monitor RGB e utilizava um método bit-mapped, o que significa que era capaz de um controlo pixel-a-pixel, necessário para gráficos. Permitia 16 cores, 4 de cada vez, num formato 320 x 200. Os pixeis eram bastante largos e a resolução era má, mas possibilitava a visualização de gráficos. O formato CGA permitia uma alta resolução de 640 x 200, mas neste caso apenas permitia duas cores. Apesar destas limitações este standard manteve-se por bastante tempo. Tinha aspectos desagradáveis, como flickering e snow. (por snow entende-se o aparecimento de pontos, em posições aleatórias no monitor. Carlos Silva/João Constantino 08-01-2004 Página 16 EGA Passados alguns anos, as limitações do CGA tornaram-se bastante visíveis para os utilizadores. O Enhanced Graphics Adapter foi o próximo a surgir. Posiciona-se entre o CGA e o bom (velhinho) VGA. Foi introduzido em 1984 e continuado até 1987, quando o primeiro sistema IBM PS/2 forma lançados no mercado. Era uma boa placa de vídeo na altura, mas não permitia a representação da enorme variedade de cores a que nós todos já estamos habituados hoje, por isso foi esquecido. Podia manipular 64 cores, mas fazer o display de apenas 16 de cada vez, quando utilizada com um monitor EGA. Dispunha de um modo de alta-resolução e um modo monocromático, e era compatível com todos os tipos de monitor anteriores, incluindo CGA e monocromáticos. Uma característica nova do adaptador EGA era a possibilidade de expansão de memória. A placa EGA tinha por defeito 64K de memória, a que podiam ser adicionados mais 64K, perfazendo um total de 128K. Isto, em conjunto com uma unidade especial de expansão de memória da IBM, que permitia adicionar mais 128K, permitia um total de 256K. Uma coisa boa foi que, em estádios posteriores de desenvolvimento, os adaptadores EGA vinham já com os 256K de memória. PGA Em 1984 a IBM introduziu o Professional Graphics Array, ou PGA. O nome indicava o seu público-alvo. O sistema, que custava cerca de USD$ 5.000, destinava-se a trabalho científico ou aplicações da área de engenharia. Com um processador integrado, o 8088, permitia a manipulação 3D e animação até 30 frames por segundo, com 256 cores e uma resolução de 640 x 480. Apesar do preço, este sistema ocupava 3 dos slots da motherboard. MCGA MultiColor Graphics Array, lançado em 1987, marcou o início de uma mudança nos standards de vídeo conduzindo ao aparecimento do VGA e SVGA, que utilizamos hoje. Era integrado nas motherboards dos antigos PS/2, modelos 25 e 30. Quando conectados a um monitor apropriado (IBM) suportava todos os modos CGA, mas não era compatível com monitores anteriores, devido ao facto de o MCGA utilizar sinais analógicos em vez de sinais TTL, como os formatos antigos. TTL significa lógica transístor-to-transitor, e é essencialmente uma forma de lógica que utiliza níveis de voltagem no transístor para determinar 0 ou 1, ON ou OFF, ligado ou desligado. Os sinais vídeo baseados em TTL não permitem variedade de cores porque ON e OFF são as únicas duas escolhas num qualquer sinal dado. Com sinais analógicos, muitas mais cores (variações de cor) são permitidas, e a interface MCGA podia gerar até 256 cores. Carlos Silva/João Constantino 08-01-2004 Página 17 Com a mudança de TTL para analógico, MCGA também alterou os conectores de 9 pinos para os conectores de 15 pinos usados hoje. 8514/A 8514/A é um standard produzido pela IBM em 1987 para funcionar com o bus MCA. Funcionava bem, permitindo altas resoluções em monitores “interlaced”. Uma adaptação posterior permitiu taxas de refresh superiores em monitores noniterlaced, produzindo imagens de alta qualidade, sem flickering (tremuras). O 8514/A funciona de forma bem diferente do VGA, embora ambos utilizem o mesmo tipo de monitor. Num 8514/A, o computador diz à placa de vídeo o que fazer e a placa de vídeo determina como o fazer. Por exemplo diz “Desenha um circulo” e a placa de vídeo sabe como o fazer. Estes são comandos de alto nível e muito diferentes das instruções pixel a pixel, que necessitavam executar cálculos no CPU nas placas VGA standards. Este standard estava à frente do seu tempo. As placas 8514/A eram muito mais rápidas que as placas VGA e permitiam melhor qualidade de imagem. No entanto, a falta de apoios fez acabar com este standard prematuramente. A IBM descontinuou este formato a favor do mais avançado XVGA, que foi lançado em 1990 e basicamente permitia mais cores em simultâneo. A CVGA manteve-se e tornou-se o standard para a arquitectura MicroChanel em plataformas PC. VGA VGA significa Vídeo Graphics Array. Foi introduzido em 2 de Abril de 1987 pela IBM, no mesmo dia em que introduzia os adaptadores MCGA e 8514/A. Embora os três fossem avançados para a altura, apenas o VGA se tornou crescentemente popular. VGA, embora agora mais avançado, tornou-se o standard para vídeo em PC, levando ao esquecimento tanto do MCGA como do 8514/A. Os IBM PS/2 continham os circuitos da VGA num único chip VLSI, integrado na motherboard. De forma a permitir a utilização deste adaptador em sistemas mais antigos, a IBM desenvolveu o PS/2 Display Adapter, a placa de vídeo VGA. Esta placa continha todos os circuitos necessários para a produção de gráficos VGA e, tal como qualquer carta de expansão, ocupava um slot na motherboard, através de um interface de 8 bits. Devido à própria evolução, a IBM descontinuou esta placa VGA básica, embora muitas estivessem disponíveis através de outros produtores. Hoje esta placa VGA não é muito utilizada, quando muito é utilizada como suplente. A VGA permitiu imagens mais nítidas a resoluções mais elevadas. A VGA standard podia mostrar 256 cores em simultâneo, de uma palete de 262.144 cores. A original VGA, no entanto, tinha de estar a uma resolução de 320x400 para permitir este número de cores. Na resolução standard de 640x480 era Carlos Silva/João Constantino 08-01-2004 Página 18 apenas capaz de 16 cores em simultâneo. A VGA também entrou no mundo monocromático. Utiliza “color summing” para traduzir gráficos a cores em gráficos sem cores, com 64 diferentes níveis de cinzento. Com efeito, simula cor num monitor monocromático. A VGA exige um monitor VGA ou outro, desde que capaz de aceitar o output analógico de uma placa VGA. SVGA Super VGA é mesmo a categoria de topo dos standards de vídeo. Incorpora tudo, desde os dias iniciais da SVGA até às placas de vídeo dos nossos dias e as suas possibilidades. O largo espectro de placas e capacidades debaixo deste standard conduziu à utilização de drivers de vídeo, algo que não era necessário ate aqui. Estes drivers de vídeo vêm em disquetes ou CD com as placas de vídeo e, uma vez instalados, actuam como uma espécie de intérprete para dizer ao Sistema Operativo e ao software como utilizar uma placa de vídeo em particular (especificamente a que está instalada). Apenas com drivers correctos é possível a utilização de uma placa de vídeo na forma em que é suposto esta operar, no máximo das suas capacidades. SVGA é muito mais avançada que a VGA. Na maioria dos casos, uma placa SVGA pode produzir milhões de cores a um número diferente de resoluções. Mas as suas capacidades dependem da própria placa e do fornecedor. Uma vez que SVGA é uma designação criada por diversas empresas, não há um verdadeiro standard SVGA. De forma a permitir a criação de alguns standards, no caos da SVGA, a Vídeo Standards Association (VESA) introduziu um standard SVGA. Este standard não lida com nenhum aspecto particular de implementação das capacidades de placa, mas, em vez disso, definiu um interface standard, chamado VESA BIOS Extension. Isto permite aos programadores um interface comum para o qual escrever, em vez de ter de o fazer para diversas placas SVGA, todas diferentes. Todas as placas SVGA em utilização hoje obedecem ao standard VESA. No início, o standard VESA SVGA foi criticado, e os produtores foram lentos a integrá-lo. Inicialmente a extensão era distribuída como um programa a ser carregado de cada vez que o computador fazia boot. Finalmente passaram a integrar a extensão com parte dos seus SVGA BIOS. Conclusão O que foi escrito trouxe-nos da data do aparecimento dos primeiros (restritos) standards de vídeo até à categoria “aberta” SVGA, a que estamos tão habituados. Há muitos outros standards de vídeo, proprietários, que também existiram e existem e não foram mencionados aqui. Mencionamos apenas os mais comuns. Carlos Silva/João Constantino 08-01-2004 Página 19 Comunicação de dados Sinais analógicos e digitais A transmissão de informação através de um sistema de comunicação implica a transmissão de sinais, através de um ou mais meios de transmissão, entre a origem e o destino. Os sinais transmitidos podem ser de dois tipos, a saber, analógicos ou digitais. Os sinais analógicos caracterizam-se por poderem assumir um valor qualquer dentro de uma gama contínua de valores ao longo do tempo. Por oposição aos sinais analógicos, os sinais digitais apenas podem assumir determinados valores discretos ao longo do tempo, e normalmente as transições ou saltos entre esses valores ocorrem em períodos de tempo regulares. Figura 2- Sinais analógicos vs Sinais digitais Em comunicação de dados os sinais digitais são transmitidos recorrendo apenas a dois valores discretos “0” e “1”, dizendo-se então que se trata de um sinal binário e designando-se cada valor lógico por “bit” (de binary digit). Bits e caracteres Os computadores agrupam e processam conjuntos de 8 bits, pelo que se adoptou a designação de Byte para as unidades (ou agrupamentos) de oito bits. A informação a transmitir é codificada em bits e Bytes, de forma a permitir uma leitura, descodificação e interpretação por parte das máquinas. Cada conjunto de bits que codificam informação (e que portanto descodificados pelo código correcto podem ser interpretados como informação) designam-se por caracteres. Cada código binário de n bits codifica 2n caracteres distintos, por exemplo para Bytes (conjuntos de 8 bits) podem-se codificar 28 = 256 caracteres distintos. Carlos Silva/João Constantino 08-01-2004 Página 20 Transmissão paralela e série Como os computadores tratam e processam Bytes (conjuntos de 8 bits) a forma mais rápida de comunicar com outra máquina seria transmitir Byte a Byte (ou conjuntos de Bytes), por oposição a transmitir bit-a-bit. Este tipo de transmissão de informação implica um suporte com possibilidade de transmissão de oito sinais em simultâneo, por exemplo um conjunto de oito pistas em circuito impresso. Figura 3 - Transmissão paralela Como a transmissão dos oito sinais se efectua em paralelo, designa-se esta forma de transmissão por “em paralelo”. Por oposição a este tipo de transmissão pode-se efectuar a transmissão de sinais bit-a-bit, sobre um único circuito em que os bits são transmitidos sequencialmente em função do tempo. Este tipo de transmissão designa-se por “em série”. Figura 4 - Transmissão série A transmissão em paralelo é ideal para pequenas distâncias, como por exemplo para transmissão interna na “motherboard” dos computadores ou entre computadores e os seus periféricos (por exemplo impressoras), uma vez que seria impraticável do ponto de vista económico criar 8 circuitos em paralelo para se interligarem máquinas distantes. A transmissão em série é ideal para distâncias longas (mais do que 2 ou três metros), e é o tipo de transmissão que se utiliza em redes informáticas, apesar de ser mais lenta do que a transmissão em paralelo. Carlos Silva/João Constantino 08-01-2004 Página 21 Naturalmente que todos os computadores possuem portas série e portas paralelas, de forma a possibilitar ambas as opções de ligação. Na transmissão em série levanta-se o problema das máquinas saberem quando é que começa e acaba o período em que um determinado bit está na linha e qual a cadência apropriada para a escrita e leitura dos bits, isto é, levanta-se a necessidade de sincronizar as máquinas, por exemplo através de um relógio ou de outra forma qualquer. Transmissão série assíncrona Uma das possibilidades de resolver o problema da sincronização é sinalizar cada carácter a transmitir com um bit de início (Start bit) e um bit de terminação (Stop bit), possibilitando ao receptor sincronizar o seu relógio com o relógio do emissor. Normalmente a linha está no estado de repouso (nível eléctrico mais elevado) e o emissor transmite um Start bit (transição de “1” para “0”), seguido dos bits constituintes do carácter, seguido de 1, 1.5 ou 2 Stop bits (“1”) (o número de Stop bits é programado pelo utilizador) e coloca novamente a linha em repouso. Figura 5 - Transmissão série assíncrona Este processo é pouco eficiente (normalmente 8 bits úteis em cada 10 transmitidos) e é apenas utilizado para pequenas distâncias. Transmissão série síncrona A outra possibilidade é sincronizar os relógios do emissor e do receptor recorrendo a caracteres de sincronismo que têm como função sincronizar o relógio do receptor. Os caracteres de sincronismo são designados por “sinal de relógio”, sendo recuperados pelo receptor para actuar no seu relógio. Carlos Silva/João Constantino 08-01-2004 Página 22 Figura 6 - Transmissão série síncrona Este tipo de transmissão é mais eficiente do que a anterior, uma vez que permite a transmissão ininterrupta de grandes sequências de bits, mas também é mais cara e mais complexa de implementar. Sentidos de transmissão Os sistemas de transmissão podem ainda ser classificados de acordo com o sentido de transmissão. Transmissão unidireccional ou Simplex, para os casos em que o fluxo de informação flua apenas num sentido, isto é, uma máquina apenas transmite e a outra apenas recebe. Figura 7 - Transmissão simplex e half-duplex Transmissão bidireccional alternada, ou Half-duplex, para os casos em que o fluxo de informação flua alternadamente em ambos os sentidos, isto é, ambas as máquinas transmitem e recebem, mas de forma alternada. Transmissão bidireccional simultânea, ou Full-duplex, para os casos em que o fluxo de informação flua simultaneamente em ambos os sentidos, isto é, ambas as máquinas transmitem e recebem em simultâneo. Figura 8 - Transmissão full-duplex Circuitos dedicados Quando as necessidades de transmissão por parte dos clientes dos serviços de comunicações exigem a transferência de grandes quantidades de informação durante longos períodos de tempo, são negociadas com os operadores de Carlos Silva/João Constantino 08-01-2004 Página 23 telecomunicações características de transmissão fixas e estabelecem-se circuitos exclusivos (isto é dedicados) para esses clientes. Estes circuitos dedicados são construídos com base no débito necessário às aplicações dos clientes. Os débitos mais comuns são 64Kbps, 128Kbps, 512Kbps e 2Mbps. Circuitos dedicados ponto-a-ponto e ponto-multiponto Os circuitos dedicados podem ser classificados de acordo com a topologia de ligação física que os suporta. Os circuitos que interligam apenas duas máquinas, isto é, que são suportados exclusivamente numa só ligação física, classificam-se como circuitos ponto-aponto, por oposição aos circuitos que interligam mais do que duas máquinas, classificados como ponto-multiponto. Figura 9 - Circuitos dedicados ponto-a-ponto e ponto-multiponto Nos circuitos ponto-multiponto apenas uma máquina central (master) comunica com todas as outras máquinas tributárias (slaves) e controla a comunicação, nomeadamente quem comunica e quando. As máquinas tributárias não comunicam entre si, a comunicação efectua-se sempre entre a máquina central e as máquinas tributárias e nunca entre máquinas tributárias. Circuitos comutados Quando as necessidades de transmissão por parte dos clientes dos serviços de comunicações não exigem a transferência de grandes quantidades de informação durante longos períodos de tempo, utilizam-se circuitos que se fazem passar por comutadores, isto é, máquinas que cruzam as entradas do lado dos clientes com as saídas do lado da rede e que possuem mais interfaces de entrada do que interfaces de saída. Cada interface de entrada está ligado, por uma ligação física exclusiva, a cada cliente, mas apenas se estabelece uma ligação entre clientes, através da rede, durante os períodos em que os clientes desejam transferir informação, optimizando desta forma as necessidades de transmissão na rede, e Carlos Silva/João Constantino 08-01-2004 Página 24 permitindo que os diversos clientes possam estabelecer ligações ou chamadas entre eles. Estes circuitos comutados são utilizados para chamadas de voz na rede telefónica e para circuitos de baixo débito ponto-a-ponto, não sendo adequados para a transmissão de dados, do ponto de vista dos operadores das redes de comunicação, uma vez que ocupam um circuito inteiro apenas com transmissões esporádicas, ou posto de outra forma, com longos períodos de silêncio. Comutação de pacotes Para a transmissão de dados utiliza-se uma técnica designada por comutação de pacotes, que consiste em segmentar a informação a transmitir em pacotes de tamanho conhecido, transmitindo esses pacotes e reconstruindo a informação no destino. Este tipo de comutação, apesar de eficiente do ponto de vista da transmissão, levantou diversas dificuldades que tiveram que ser resolvidas, como por exemplo, o endereço dos pacotes, o controlo da sequência e ordenação dos pacotes, etc. Figura 10 - Comutação por pacotes A comutação por pacotes pode ainda ser subdividida em comutação por circuito virtual, quando se estabelece um circuito ou caminho a ser percorrido por todos os pacotes, ou em comutação por datagrama, quando os pacotes são tratados de forma independente uns dos outros, isto é pacote-a-pacote. Sistemas de comunicações Introdução Todos os sistemas de comunicações, por muito complexos que sejam, podem ser modelados por algumas funções genéricas, muito simples e intuitivas que escondem a real complexidade dos sistemas. Carlos Silva/João Constantino 08-01-2004 Página 25 Na sua forma mais simples podemos considerar apenas cinco funções para modelar um sistema de comunicação: • • • • • Função origem – produz os dados a transmitir Função de transmissor – transforma e formata os dados num sinal para transmissão Função de sistema de transmissão – transporta o sinal entre dois pontos Função de recepção – recebe o sinal e converte-o novamente em dados Função destino – recebe e consome os dados recebidos ORIGEM TRANSMISSOR SISTEMA DE TRANSMISSÃO RECEPTOR DESTINO Figura 11 - Modelo um sistema de comunicação Naturalmente que o modelo acima esconde um conjunto de questões que têm que ser bem estudas e especificadas, para que se possa efectivamente construir um sistema de comunicações. Começando pela ligação física é necessário garantir algumas condições para que dois sistemas possam comunicar entre si, nomeadamente: • • • • que exista um meio físico a interligar os sistemas que os interfaces dos sistemas estejam adaptados ao meio físico utilizado que ambos os sistemas percebam e interpretem correctamente os sinais transmitidos que o meio físico possibilite a transmissão em condições ideais (ou aceitáveis no tocante a atenuação, distorção, ruído, etc.) Alguns dos pontos supra mencionados podem-se optimizar e minimizar, mas não se conseguem anular de todo os seus efeitos, pelo que se têm que introduzir mecanismos que possibilitem o seu controlo, como por exemplo mecanismos de retransmissão e correcção de erros. São também necessários mecanismos de adaptação e identificação dos interfaces ligados ao meio físico, e se necessário a inclusão de sistemas intermédios para encaminhar (escolher o melhor caminho entre dois pontos) e endereçar os dados (identificar de forma unívoca os sistemas de recepção) entre diversas máquinas. Carlos Silva/João Constantino 08-01-2004 Página 26 Figura 12 - Sistemas intermédios Mesmo considerando um canal de transmissão ideal, para que duas máquinas consigam trocar informação entre si é necessário que se entendam quanto aos tempos e à sintaxe utilizadas, pelo que ainda se impõem um conjunto de regras de estrutura e controlo do fluxo de informação, normalmente agrupadas sob a designação de arquitecturas e protocolos de comunicação. As arquitecturas e protocolos de comunicação podem ser específicas de um determinado fabricante, (designadas por proprietárias), ou definidas por um órgão de normalização e portanto, independentes dos fabricantes e do tipo de equipamentos utilizados, designando-se por arquitecturas e protocolos abertos ou não proprietários. Após os problemas de comunicação estarem resolvidos ainda acrescem outras preocupações como o armazenamento e acesso remoto a dados, a gestão de recursos e processos (programas) nos sistemas de comunicação e finalmente a definição de procedimentos de segurança. Só então é possível que as aplicações possam trocar informação entre si, recorrendo a serviços ou funcionalidades oferecidas pelos processos de comunicação. Modelo de referência OSI Na prossecução do conceito de sistemas abertos e na tentativa de definição de um modelo de referência universal para as comunicações de dados, foi levado a cabo nos anos 70 e 80 um trabalho liderado pela Organização Internacional de Normalização (ISO) que culminou na apresentação de um modelo designado por Open Systems Interconnection (OSI). Este modelo tinha como pretensão especificar normas que permitissem a interligação de módulos de diversos fabricantes, tendo como critério de escolha as funcionalidades e capacidades oferecidas por cada módulo, de forma a Carlos Silva/João Constantino 08-01-2004 Página 27 construir sistemas de comunicações funcionais e heterogéneos em equipamento. Os sistemas abertos libertam os construtores dos sistemas de comunicações da dependência dos fabricantes de equipamento, mas têm a desvantagem de exigirem uma maior complexidade aos diversos módulos constituintes do sistema, de forma a garantir que todos eles são compatíveis entre si, o que normalmente se traduz num desempenho inferior e num acréscimo de custo dos diversos módulos. A arquitectura preconizada no modelo OSI nunca se tornou num verdadeiro Standard De Jure, contudo tornou-se no modelo de referência comparativa para análise das diversas arquitecturas existentes e é uma excelente ferramenta pedagógica para fazer compreender os conceitos mais importantes na comunicação entre sistemas. O modelo OSI assenta na estratificação das funcionalidades necessárias para construir uma rede de comunicações aberta, agrupando as funções afins em camadas, perfeitamente identificadas e independentes entre si. O modelo estratifica as funções identificadas como necessárias em 7 camadas, podendo ainda fazer-se uma subdivisão em dois grupos, as camadas de 1 a 4 para funções de transporte de dados através da rede (função de canal de transmissão ideal) e as camadas de 5 a 7 para funções de interacção entre aplicações (função de troca de informação). Figura 13 - Modelo OSI e funções por camada Camada 1 – (camada física) Especifica o interface mecânico e eléctrico (fichas, níveis de tensões, etc.) com o meio físico de suporte à comunicação. A informação lógica a transmitir (base binária “bits” com valor lógico “0” ou “1”) é transformada em elementos físicos, por exemplo tensões ou correntes, para os quais existem níveis especificados para representação de cada bit. Carlos Silva/João Constantino 08-01-2004 Página 28 Camada 2 – (camada de ligação de dados) Estabelece, mantém e garante uma ligação livre de erros entre dois sistemas adjacentes (a nível local ou troço-a-troço). Os bits são organizados em tramas (frames), sendo esta camada responsável pelo acesso ao meio físico (isto é determina o instante em que a máquina pode colocar informação na rede) e pelo controlo de fluxo e de sequência das tramas. Camada 3 – (camada de rede) Endereça e encaminha as tramas na rede, identificando de forma unívoca todos os sistemas ligados à rede, recorrendo a endereços universais. A função principal é de encaminhamento (routing) das tramas através da rede. Camada 4 – (camada de transporte) Garante às camadas superiores uma ligação fiável extremo-a-extremo, livre de erros e independente do tipo e equipamento das camadas inferiores. Camada 5 – (camada de sessão) Controla e sincroniza a troca de informação extremo-a-extremo, estabelecendo modos de diálogo simplex, half-duplex ou full-duplex. Camada 6 – (camada de apresentação) Resolve diferenças no formato e representação de dados e fornece serviços de compressão, encriptação e sintaxe. Camada 7 – (camada de aplicação) Fornece as funções de comunicação utilizadas pelas aplicações cliente, como por exemplo transferência de ficheiros, correio electrónico, etc. Esta camada é frequentemente confundida com as próprias aplicações suas clientes, uma vez que o utilizador não tem a percepção exacta da função que está a utilizar no ambiente da aplicação, por exemplo num ambiente de janelas (Windows). Serviços e pontos de acesso aos serviços Cada camada do modelo agrupa um conjunto de funções afins, que interagem com outras funções suas clientes, para as camadas superiores, e funções suas fornecedoras de serviços para as camadas inferiores. Do ponto de vista conceptual cada camada pode ser encarada como uma empresa, com diversas valências internas, que interage com outras empresas suas clientes e suas fornecedoras, embora no modelo OSI apenas exista uma empresa cliente, a camada imediatamente acima, e uma empresa fornecedora, a camada imediatamente abaixo. O ponto de troca de serviços entre as camadas adjacentes designa-se por interface e para uma dada camada N designa-se por interface N. Carlos Silva/João Constantino 08-01-2004 Página 29 Tal como dentro das empresas, onde os serviços adquiridos ou fornecidos provêm de diversos departamentos, também dentro de cada camada existem entidades (processos computacionais) que são os verdadeiros utilizadores e produtores dos serviços. As entidades de nível N (departamentos da empresa N) fornecem serviços a camadas de nível N+1 (departamentos da empresa N+1) através de primitivas de serviço disponíveis em pontos de acesso ao serviço (SAP). Figura 14 - Utilizadores e fornecedores de um serviço As entidades da camada N (departamentos da empresa N) de um dado sistema comunicam com entidades da mesma camada N (outros departamentos da empresa N) em sistemas (máquinas) locais ou remotos usando protocolos de nível N. Protocolos de nível e unidades de dados Estes protocolos obedecem a uma sintaxe e a uma semântica bem definida e são utilizados para trocar mensagens designadas por unidades protocolares de dados (PDU) entre entidades da uma mesma camada. Genericamente as PDU têm campos que contêm informação do seu tipo, comprimento, endereço da entidade destino e informação para ser utilizada nas funções executadas na entidade destino. As entidades em camadas adjacentes (departamentos da empresa N e da empresa N+1) trocam informação através dos SAP em unidades de serviço de dados (SDU). As unidades de dados de uma dada camada são encapsuladas dentro de unidades de dados da camada inferior, tornando-as invisíveis às entidades desta camada. Este encapsulamento garante a independência entre as diversas camadas. Carlos Silva/João Constantino 08-01-2004 Página 30 Figura 15 - Encapsulamento e desencapsulamento no modelo OSI A definição concreta da cada camada exige a definição de um conjunto de serviços disponíveis na camada, um conjunto de serviços disponíveis na camada inferior e o formato de interacção com a entidade correspondente no sistema remoto. LAN, MAN e WAN Origem e evolução das redes Com o advento dos computadores e com a digitalização da informação cedo se sentiu a necessidade de partilha e transferência de informação entre máquinas, sob a forma de ficheiros informáticos. Por forma a possibilitar a correcta transferência de ficheiros e de informação entre máquinas, foram definidas regras pelos diversos intervenientes, designadas por protocolos, que evoluíram ao longo dos anos por força da normalização internacional (designados por protocolos De Jure) ou por força de uma forte implantação no mercado, apesar de não normalizados (designados por protocolos De Facto). A génese das redes remonta a 1960 quando a IBM desenvolveu o SAGE, que era um sistema de defesa aérea para o governo dos EUA e que esteve em funcionamento até 1980. No início da década de 70 a IBM desenvolve o protocolo proprietário IBM, a Xerox Corporation desenvolve o protocolo Ethernet e mais tarde a IBM desenvolve o protocolo Token-Ring. Estes dois protocolos, embora proprietários, foram a base das arquitecturas das redes de então, sendo posteriormente normalizados como protocolos abertos por forma a possibilitar a integração de diferentes tipos de hardware e software. Carlos Silva/João Constantino 08-01-2004 Página 31 Conceito de LAN, WAN, MAN e VAN As redes de comunicação entre computadores podem ser classificadas de acordo com a área geográfica ou área organizacional em que estão implantadas. Para pequenas áreas geográficas, como por exemplo um, ou vários, edifícios num quarteirão, designa-se a rede que interliga as máquinas nos diversos andares, entre andares, ou entre edifícios por LAN (Local Area Network) ou redes de área local. As LANs caracterizam-se por exibirem velocidades de transmissão elevadas, da ordem de 10/100 ou 1000 Mbps, baixo custo de implantação e operação, e fortes limitações na distância máxima admissível. Normalmente as LANs são conotadas com a tecnologia que lhes está subadjacente, nomeadamente a Ethernet, e são utilizadas para partilhar informação ou ficheiros entre postos de trabalho ou entre estes e periféricos, como impressoras. Existem ainda dois outros tipos de redes aplicáveis a áreas geográficas restritas, as PAN (Personal Area Network) que utilizam redes sem fios (Wireless) para interligar máquinas numa mesma sala e as SAN (Storage Area Network) que se destinam à interligação de grandes máquinas de armazenamento de dados, numa mesma sala. Para interligar LANs (ou redes locais) distantes (por exemplo em diferentes países) ou uma máquina distante a uma LAN, podem-se utilizar diversas tecnologias e equipamentos, designando-se este tipo de rede por WAN (Wide Area Network) ou redes de área alargada. As WAN têm como principal vantagem as distâncias máximas admissíveis e como principal desvantagem a baixa velocidade de transmissão. Existe ainda uma classificação intermédia, para interligação de LANs em áreas citadinas (tipicamente 40 a 80 Km) através de redes públicas de alta velocidade (100 Mbps). A designação é de MAN (Metropolitan Area Network) ou rede de área metropolitana. As MAN são normalmente utilizadas para interligar LANs situadas em diversos locais de uma mesma cidade. Carlos Silva/João Constantino 08-01-2004 Página 32 Figura 16 - Conceito de LAN, MAN e WAN Recentemente com o advento do conceito de redes virtuais, isto é, redes suportadas em redes públicas (por exemplo MANs) mas com um comportamento de redes privadas (por exemplo um banco que interliga as suas diversas LANs através de uma MAN, mas a que só os seus colaboradores têm acesso, logo do ponto de vista do banco a rede é privada, porque não permite acessos públicos) surgiu a classificação de VAN (Virtual Area Network). Estendendo este conceito exclusivamente a áreas locais podemos classificar ainda uma rede como VLAN (Virtual Local Area Network), para redes virtuais suportadas exclusivamente em LANs. Estas redes, e em particular as LANs, podem-se decompor em diversos itens que as caracterizam, a saber: • Topologia e cablagem • Tecnologia de rede • Sistemas operativo de rede • Equipamento e nós de rede Topologias de redes de área local (LANs) A forma como os diversos cabos de suporte às comunicações entre máquinas estão ligados designa-se por topologia da rede. As topologias podem-se subdividir em topologias física (localização física) e lógica. As topologias lógicas mais utilizadas nas redes LAN são, a saber: • Em BUS • Em Anel • Em Estrela • Em Árvore • Em Malha Carlos Silva/João Constantino 08-01-2004 Página 33 Na topologia de BUS todas as máquinas estão ligadas em paralelo ao meio físico (leia-se cabo coaxial) que partilham, ressentindo-se todas as máquinas cada vez que ocorre uma avaria num dos elementos do troço em que estão ligadas (por exemplo cabo, fichas, placas de rede, etc.). Nesta topologia quando uma máquina transmite um pacote, todas as máquinas o lêem e apenas a máquina destino o aproveita. A transmissão pode-se efectuar apenas num sentido ou em ambos os sentidos recorrendo a diferentes frequências de transmissão. Na topologia em ANEL as máquinas estão “penduradas”, através de equipamentos de interligação, num anel, pelo que estando o anel em boas condições, cada máquina só depende da sua interligação ao anel, conferindo assim mais fiabilidade à ligação. Nesta topologia a transmissão efectua-se apenas num sentido, e as diversas máquinas entre a origem e o destino vão regenerando sucessivamente os pacotes, até que a máquina destino o retira do anel, ou caso o pacote de uma volta completa ao anel e retorne à máquina fonte, esta retira-o. Na topologia em ESTRELA, todas as máquinas estão ligadas a um nó central, através de um cabo exclusivo para cada máquina. Nesta topologia os pacotes são difundidos para todas as máquinas (via Hubs), recuperados pela máquina destino e descartados por todas as outras máquinas. Facilmente se conclui que a topologia em estrela é mais dispendiosa do que as demais, porque utiliza um cabo exclusivo do nó até às máquinas e também porque os nós têm um número de portas finito, o que obriga à proliferação de nós em redes com muitas máquinas. Carlos Silva/João Constantino 08-01-2004 Página 34 Figura 17 - Topologias em Bus, Anel e Estrela As topologias acima descritas podem ser encaradas como topologias simples, que permitem construir topologias compostas à sua custa. A topologia em árvore é uma topologia composta por uma sequência hierárquica de estrelas, em que as máquinas são ligadas obedecendo a uma hierarquia pré-definida tendo como ponto de partida um nó raiz. Na topologia em malha as máquinas são ligadas a nós de acesso que estão interligados entre si formando uma malha. Suportes de transmissão Intimamente relacionado com a topologia da rede está o tipo de suporte de transmissão utilizado (normalmente cabo ou ar). Cabo coaxial Os cabos coaxiais caracterizam-se por possuírem uma alma ou condutor interno em alumínio com banho de cobre, revestido por um material isolante de plástico, que por sua vez é revestido por uma malha de cobre ou tubo de alumínio com revestimento exterior final em plástico. Este tipo de cabos designa-se por RG∅ (por exemplo RG11) se forem cabos finos ou por C∅ (por exemplo C500 ou C650) se forem cabos grossos ou standard. A principal diferença nas características de transmissão imposta pela secção do cabo é a atenuação do sinal por unidade de comprimento (quanto maior a secção, menor a atenuação), pelo que se utilizam cabos de maior secção para a rede exterior (maiores distâncias) e cabo fino para as redes interiores (menores distâncias). Carlos Silva/João Constantino 08-01-2004 Página 35 Os cabos coaxiais exibem uma grande largura de banda e grande imunidade ao ruído electromagnético, sendo muito utilizados em redes de CATV e LANs para transmissão de sinais eléctricos em tensão (por vezes são designados por cabos de 75Ω, referindo-se esta designação à sua impedância característica). As suas principais desvantagens prendem-se com o elevado custo do cabo e dos conectores utilizados e com dificuldades de operação e manutenção. Cabo de pares simétricos Os cabos de pares simétricos são constituídos por condutores de cobre, isolados por uma camada de plástico e agrupados em pares (grupos de dois condutores) entrançados. Este tipo de cabos existe em diversas capacidades medidas ao par (por exemplo 2 pares, 10 pares, 100 pares, 400 pares ou 1000 pares) com diversas secções para a alma condutora (por exemplo 0,4 mm, 0,6mm ou 0,9mm) e obedecendo a um código de cores para identificar cada par dentro do cabo. A título de curiosidade enumera-se o código de cores usual para este tipo de cabos: Par 06 Vermelho + Azul Par 11 a 15 Preto + … Par 01 Branco + Azul Par 02 Branco + Laranja Par 07 Vermelho + Laranja Par 16 a 20 Amarelo + … Par 03 Branco + Verde Par 08 Vermelho + Verde Par 21 a 25 BrancoAzul + Par 04 Branco + Castanho Par 09 … + Castanho … Par 05 Branco + Cinzento Par 10 … + Cinzento Toda a rede do serviço telefónico utiliza este tipo de cabo para transmissão, nomeadamente na rede de acesso (parcela da rede entre as casas dos clientes e a central do operador mais próxima). Podemos pensar em WANs e MANs com este tipo de cabos e com este tipo de capacidades. Também para LANs existe um cabo de pares simétricos designado por cabo UTP (Unshielded Twisted Pair) com características normalizadas e especificadas para cada categoria de cabo (por exemplo Cat. 5 (100Mhz, 1Gb/100m), Cat.6 (250Mhz, 2,5Gb/100m)), (por vezes são designados por cabos de 120Ω, referindo-se esta designação à sua impedância característica). A transmissão pode ser efectuada em sinais eléctricos de tensão ou de corrente. Este tipo de cabos exibem baixo custo, fácil instalação e manutenção sendo actualmente a base das cablagens estruturada. Fibra óptica Os cabos de fibra óptica são constituídos por um núcleo de plástico ou vidro, revestido por uma camada de plástico, constituindo assim as fibras individuais Carlos Silva/João Constantino 08-01-2004 Página 36 do cabo. Estas fibras são agrupadas em tubos de Kevlar (Loose Tubes) e os tubos são agrupados e revestidos por uma camada exterior de PVC. Também existe um código de cores para identificar as fibras no cabo, e a transmissão é efectuada por sinais de luz transmitidos ao longo das fibras. As fibras podem suportar um só modo de propagação de luz, designando-se por monomodo, ou suportar mais do que um modo de propagação de luz, designando-se por multimodo. As fibras monomodo são mais caras do que as fibras multimodo, uma vez que a secção do seu núcleo é inferior à secção homóloga das fibras multimodo, contudo permitem atingir distâncias de transmissão superiores. A fibra óptica é actualmente o suporte físico que exibe maior largura de banda, maior velocidade de transmissão, melhor imunidade a ruídos e que cobre maiores distâncias sem necessidade de regeneração do sinal. Actualmente já não é dos suportes mais caros em si, mas exige equipamentos electrónicos associados, nomeadamente lasers, que efectivamente oneram este tipo de soluções. Os cabos de fibra óptica utilizam-se fundamentalmente para WANs e MANs e muito raramente para LANs, uma vez que por definição a área geográfica das LANs é muito restrita. Interfaces ar (sem fios) Surgiram recentemente interfaces ar comerciais para LANs (designadas por Wireless LANs) que exigem a montagem de antenas nas áreas a disponibilizar o serviço e de receptores rádio nas diversas máquinas a ligar à rede A transmissão efectua-se por ondas electromagnéticas de rádio ou infravermelhos. Este tipo de ligação via rádio padece ainda de pouca largura de banda, pouca área de cobertura e de alguns problemas técnicos, contudo é uma boa solução para pequenas redes pela rapidez e facilidade de instalação, e uma vez que não exige a montagem de infra-estruturas de cabos pode, por esta via, minimizar os custos de implementação da LAN. Cablagem estruturada para LANs Por oposição ás WANs e MANs, onde toda a infra-estrutura é instalada e mantida por operadores de telecomunicações, que fornecem o serviço de ligação, as LANs são maioritariamente instaladas e mantidas pelos seus proprietários privados, devendo seguir um determinado número de regras de projecto e construção para se poderem operar, manter e interligar com as WANs e MANs públicas. Com o objectivo de minimizar os custos de implantação de cablagens, e providenciar alta flexibilidade e adaptabilidade das mesmas a requisitos futuros, Carlos Silva/João Constantino 08-01-2004 Página 37 foram elaboradas normas de projecto e construção de cablagens para LANs. Existem várias normas, umas nacionais outras internacionais, que embora exibindo diferenças de pormenor, são semelhantes na sua filosofia de base. Genericamente as normas advogam uma cablagem estruturada, seguindo uma hierarquia em árvore, muito bem normalizada e caracterizada. Uma cablagem estruturada é composta por todos os componentes necessários para assegurar o suporte físico para as comunicações (cabos, conectores, repartidores/ distribuidores, etc.). A hierarquia normalizada em topologia física de árvore inicia-se com um repartidor/ distribuidor central para toda a área geográfica a servir, de onde saem cabos de interligação para os diversos repartidores/ distribuidores dos edifícios. Estes cabos são designados por primários ou backbone da rede. Dos repartidores/ distribuidores dos edifícios sai uma coluna montante com os respectivos cabos para cada repartidor/ distribuidor de piso. Em cada piso existirão repartidores/ distribuidores de acordo com as necessidades logísticas da área, que efectuam a distribuição dos cabos pelas tomadas. Figura 18 - Cablagem estruturada Todas as distâncias máximas entre repartidores, ou demais componentes, bem como o seu número e disposição foram objecto de normalização, e são objecto de certificação de conformidade com as normas, afim de se poderem interligar com as redes públicas. Métodos de acesso ao meio partilhado Como facilmente se depreende da explicação acima em 0, nestas topologias o meio físico é partilhado pelas diversas máquinas que constituem a rede, pelo que se exigem métodos de acesso ao meio, por forma a que todas as máquinas possam, em dado instante, possuir exclusivamente o meio físico para as suas transmissões. Carlos Silva/João Constantino 08-01-2004 Página 38 O controlo de acesso ao meio pode ser feito recorrendo a várias técnicas, das quais a CSMA (Carrier Sense Multiple Access) e a Passagem de Testemunho (Token) são as mais relevantes. CSMA (Carrier Sense Multiple Access) Neste método as máquinas monitorizam o meio (medem o sinal) e aguardam um período de silêncio para efectuarem a sua transmissão. Quando duas ou mais máquinas transmitem em simultâneo dá-se uma colisão e o nível de sinal no meio altera-se, então as máquinas envolvidas prolongam a colisão por algum tempo para permitir a sua detecção por todas as máquinas da rede e depois utilizam um determinado algoritmo para retransmitir. O algoritmo mais utilizado é o de detecção de colisão com espera aleatória, em que as máquinas envolvidas aguardam um período aleatório de tempo para retransmitir, se entretanto o meio estiver disponível. Naturalmente que à medida que o número de máquinas aumenta, maior será a probabilidade de ocorrência de colisão, e mais lenta será a rede. Passagem de testemunho (Token) Neste método, muito utilizado para topologias em anel, existe uma trama que funciona como testemunho. Quando uma máquina pretende transmitir tem que aguardar que lhe seja passado o testemunho e depois inicia a transmissão. Quando terminar a sua transmissão liberta o testemunho, que será entregue a outra máquina de acordo com um determinado algoritmo. Tecnologias de rede As tecnologias de rede, e especificamente neste caso, de rede local, encontram-se normalizadas por organismos como o IEEE (Institute of Electrical and Electronic Engineers) e a ISO (International Organization for Standardization), por forma a garantir a interoperabilidade entre sistemas. Para LANs a arquitectura de normalização abrange os dois níveis inferiores do modelo OSI (Físico e de Dados), existindo diversas possibilidades de escolha para as camadas protocolares a utilizar. Carlos Silva/João Constantino 08-01-2004 Página 39 Figura 19 - ISO 8802 - Camadas protocolares Nesta arquitectura o segundo nível OSI encontra-se dividido em dois sub níveis, um inferior de controlo de acesso ao meio físico MAC (Media Access Control) e outro superior de controlo lógico das ligações LLC (Logical Link Control). Figura 20 - Modelo OSI vs. Modelo ISO 8802 As funções do MAC são garantir o acesso ao meio físico a todas as máquinas da rede, pelo que tem a responsabilidade da identificação das estações na rede. Para esta função utiliza endereços de 48 bits, normalmente designados por endereços MAC ou endereços físicos, que são constituídos por três bytes que identificam o fabricante, seguidos de três bytes que identificam a placa de rede do respectivo fabricante. Carlos Silva/João Constantino 08-01-2004 Página 40 Normalmente e para facilidade de utilização, estes endereços são especificados em Hexadecimal (base 16), por exemplo 00:F1:E2:AA:00:1D que é a informação que circula nos campos DMAC e SMAC das tramas protocolares desta camada. Figura 21 - Constituição do endereço físico (MAC Adress) O sub nível LLC é responsável por oferecer os serviços de encaminhamento às camadas superiores e especificar os modos de ligação (LLC1 – connectionless; LLC2 – Ligação com controlo de fluxo e de erros; LLC3 – acknowledged connectionless). As PDUs MAC têm uma estrutura com seis campos, a saber: dados Preâmbulo: Inicio de trama DMAC: Endereço físico de destino SMAC: Endereço físico de origem CONTROLO: Controlo sobre tamanho dos dados, colisões, tipo de DADOS: Dados do LLC FCS: Terminus de trama e verificação dos erros de transmissão Figura 22 - ISO 8802 - Estrutura das PDUs ISO 8802-3 – Ethernet A génese da Ethernet remonta a meados da década de 70 quando Bob Metcalfe e David Bogs a inventaram e o consórcio Xerox, Intel e DEC a desenvolveram para o mercado. Posteriormente (1985) normalizada pelo IEEE com a norma IEEE 802-3 e pela ISO com a norma ISO 8802-3, tornou-se actualmente a tecnologia mais utilizada para redes de áreas local. A Ethernet utiliza CSMA/ CD como técnica de acesso ao meio, meio este que era inicialmente o cabo coaxial fino (75Ω) em Bus lógico, e actualmente pode ser um qualquer meio descrito em 0 com topologia física em estrela ou árvore, mantendo o Bus lógico. Carlos Silva/João Constantino 08-01-2004 Página 41 Esta tecnologia é normalmente designada por “X Base Y” em que “X” identifica o débito binário em Mbps “Base” significa que a transmissão se efectua em banda base, isto é, não recorre a portadoras modeladas, e “Y” identifica o tipo de suporte físico utilizado. Figura 23 - Variantes Ethernet ISO 8802-4 – Token Bus Nas redes “Token” o acesso ao meio efectua-se por passagem de testemunho. Para este caso (Token Bus) com topologia lógica em Bus, o testemunho é passado de acordo com um algoritmo de prioridades entre estações. Estas redes nunca se conseguiram implantar no mercado e actualmente quase não existem. ISO 8802-5 – Token Ring Esta rede “Token” com topologia física e lógica em anel, é a mais utilizada das “Token”, contudo é preterida em favor das redes Ethernet por ser mais cara. Os débitos são de 4Mbps (max. 275m para cabo UTP), 16Mbps (max. 250m para cabo UTP) ou 100Mbps (max. 100m para cabo UTP). O algoritmo de captura do testemunho também obedece a um esquema de atribuição de prioridades às máquinas. O modo de funcionamento é muito simples, quando uma estação pretende transmitir aguarda a chegada do testemunho ao seu interface de rede e retira-o da rede, colocando a informação que pretende transmitir, devidamente formatada. Cada estação analisa então os endereços MAC da trama transmitida e se o MAC destino corresponder ao seu endereço (da sua placa de rede), retira a Carlos Silva/João Constantino 08-01-2004 Página 42 trama do anel, recupera a informação e efectua uma cópia com os MAC destino e origem trocados, e coloca-a novamente no anel. A estação origem ao receber a trama que transmitiu, retira-a da rede, voltando a colocar o testemunho, que entretanto gerou, para utilização por outra estação. IEEE 802-11 – Wireless LAN As Wireless LANs têm vindo a ganhar terreno no mercado por força da sua simplicidade de instalação, flexibilidade, escalabilidade e baixo custo. A primeira norma Wireless LAN nasceu no seio do IEEE, norma IEEE 802-11, para LANs a 1Mbps e 2Mbps. Para as Wireless LANs podem-se utilizar três técnicas diferentes para a transmissão, a saber: em banda estreita, em Spread Spectrum (espectro alargado) ou por infravermelhos. Existem também várias formas de configuração/ gestão para as células wireless. As técnicas de espectro alargado (Spread Spectrum) foram desenvolvidas nos EUA para aplicações militares, tendo sido adoptadas para comunicações civis pela sua robustez e características espectrais. Estas técnicas podem ser subdivididas em três grandes famílias, a saber, Direct Sequence, Frequency Hopping e Time Hopping. Todas elas recorrem a um código pseudo aleatório para codificar o sinal original num sinal com maior largura espectral e que só pode ser recuperado por um receptor que utilize o mesmo código pseudo aleatório. Estes códigos, ou sequências, são gerados nos emissores e receptores de acordo com algoritmos bem estudados, dos quais os mais utilizados são as sequências de Gold e de Kasammi. Direct Sequence (DS) A técnica DS multiplica à emissão o sinal original S(t) pelo código pseudo aleatório C(t), gerando assim um sinal de espectro alargado M(t). M(t) = S(t) * C(t) Restringindo o código aos valores lógicos +1 temos que C2(t) = ( +1 )2 = 1, logo para recuperar o sinal basta que o receptor utilize o mesmo código, multiplicando-o pelo sinal M(t), isto é M(t) * C(t) = S(t) * C(t) * C(t) = S(t) * C2(t) = S(t) * 1 = S(t). Uma vez que esta técnica apenas multiplica (à emissão e à recepção) o sinal a emitir pelo código pseudo aleatório, foi designada por sequência directa. Frequency Hopping (FH) Para FH o emissor salta de frequência de emissão de acordo com o código pseudo aleatório, pelo que o receptor terá também que saltar para a frequência de emissão a cada instante para recuperar o sinal. Carlos Silva/João Constantino 08-01-2004 Página 43 Figura 24 - Frequency Hopping Time Hopping (TH) Para TH os sinais são emitidos em intervalos de tempo codificados pelo código pseudo aleatório. O receptor terá que agrupar e ordenar os diversos segmentos de acordo com o código pseudo aleatório para recuperar a informação. Figura 25 - Time Hopping ISO 9314 – FDDI A tecnologia FDDI (Fiber Distributed Data Interface) foi desenvolvida fundamentalmente para backbones de redes, isto é ligações de alto débito (actualmente já não seria alto débito (100Mbps)) entre servidores de grande porte situados em diversos edifícios. A norma especifica a velocidade de 100Mbps, topologia em duplo anel de fibra óptica, método de acesso ao meio por testemunho, para extensões de 200Km e para um máximo de 500 máquinas. Esta tecnologia apresenta um elevado grau de fiabilidade e robustez, uma vez que às características de imunidade ao ruído das fibras ópticas, alia um duplo anel securizado, isto é, utiliza um anel como primário ou principal e um segundo anel como backup em caso de falha do anel principal. Quando o anel principal falha as máquinas ligadas aos dois anéis (DAS Dual Attached Station) reconfiguram as ligações por forma a assegurar o tráfego normal. Carlos Silva/João Constantino 08-01-2004 Página 44 Estas redes possuem uma pilha protocolar algo mais complicada do que as precedentes e os interfaces de rede são normalmente mais caros, pelo que já está em fase decrescente de utilização. Componentes de rede e equipamentos de interligação As redes são compostas por uma grande panóplia de equipamentos, que suportam ou executam variadas funções. Estes equipamentos podem ser classificados de acordo com a função que desempenham em, equipamentos de suporte e interligação, ou equipamentos de diagnóstico e teste. Os equipamentos abordados seguidamente enquadram-se dentro da primeira categoria, equipamentos de suporte e interligação. Repetidores Os repetidores têm como função regenerar o sinal transmitido, que por via de deficiências do meio físico de transmissão, sofre alterações à medida que se propaga. Os repetidores podem ser encarados como equipamentos de expansão de LANs, providenciando serviços de regeneração do sinal entre segmentos de rede, de forma transparente, bidireccional, “burra” e barata, limitando-se a actuar ao nível físico (nível 1) do modelo OSI. Os repetidores podem-se classificar em repetidores de um só porto, ou repetidores multiporto (MR – Multiport repeaters). Neste último caso obtém-se a vantagem de “isolar” os diversos segmentos físicos da rede, do ponto de vista do suporte, o que facilita o diagnóstico de avarias nos cabos. Figura 26 - Mapeamento da função repetidor no modelo OSI As desvantagens dos repetidores prendem-se com o facto de não efectuarem qualquer filtragem aos sinais, pelo que os erros se propagam por todos os segmentos da rede ligados ao repetidor. Concentradores (hubs) Os concentradores surgiram como o advento das cablagens estruturadas e são dos equipamentos mais utilizados em LANs. Podem ser vistos como Carlos Silva/João Constantino 08-01-2004 Página 45 repetidores de multiporto (MR) com todas as portas da mesma tecnologia (por exemplo Ethernet) constituindo um nó de uma estrela. A filosofia de funcionamento dos concentradores (Hubs) é muito simples, todos os pacotes que chegam ao Hub são transmitidos para todas as portas do Hub, sem qualquer tipo de filtragem, apenas amplificados ou regenerados. Vulgarmente os Hubs possuem portas ISO 8877 (RJ45), portas directas para ligação às máquinas e uma porta de uplink (com os sinais de Tx e Rx trocados em relação às outras portas) para ligação a outro Hub numa hierarquia em árvore. (Nota: As portas de uplink podem ser simuladas em portas normais utilizando um cabo cruzado). Figura 27 - Topologia de cabo directo e cruzado Existem no mercado Hubs para diversas capacidades, sendo os de maior capacidade alojados em racks modulares. À semelhança dos repetidores, são equipamentos que actuam apenas ao nível da camada física do modelo OSI. Pontes (bridges) As pontes (bridges) são equipamentos para interligação de segmentos de redes, com capacidade para isolamento/ filtragem de tráfego entre segmentos, recorrendo a funcionalidades de nível 2 do modelo OSI. Carlos Silva/João Constantino 08-01-2004 Página 46 Figura 28 - Mapeamento da função ponte no modelo OSI As bridges identificam-se na rede como máquinas autónomas (recorrendo ao seu MAC address), e quando recebem as tramas de um segmento origem, analisam os erros (se existirem descartam a trama) e transmitem-nas para o segmento destino, se for caso disso, baseando a sua decisão num algoritmo que recorre ao MAC address (endereço físico) da máquina de destino. De acordo com o acima descrito, infere-se que as bridges necessitam de uma base de dados com os endereços MAC das máquinas das redes a elas ligadas, e respectivo porto de ligação na bridge, e que processam tramas, logo executam funções de armazenamento e filtragem de tramas. O processamento de tramas introduz algum atraso na comunicação, que no entanto é largamente compensado pelo isolamento do tráfego e consequente diminuição de colisões na rede. Comutadores (switchs) Os comutadores (Switchs) executam funções semelhantes ao agrupamento das funcionalidades das Hubs e das Bridges, na medida em que permitem a interligação de várias máquinas em estrela, e segregam o tráfego entre os diversos braços da estrela, comutando as tramas para o braço onde se encontra ligada a máquina de destino. Os Switch podem funcionar num de dois modos possíveis, a saber: cut-through ou store-and-forward. No primeiro modo, o Switch não espera a recepção completa da trama para iniciar a sua transmissão para o braço (porto) de destino, evitando desta forma o armazenamento da trama antes da transmissão para o braço destino. No modo store-and-forward, o Switch recebe integralmente a trama, armazenaa, analisa os erros e só depois efectua a transmissão para o braço destino. A principal vantagem deste modo de funcionamento é permitir a utilização de diferentes velocidades para os diferentes braços da rede (Ethernet (10Mbps) e Fast-Ethernet (100Mbps) por exemplo) uma vez o armazenamento permite transmitir a um débito superior ao da recepção. Este Switchs que detectam Carlos Silva/João Constantino 08-01-2004 Página 47 automaticamente a velocidade de transmissão das máquinas designam-se por Switchs auto-sensing. Existem no mercado Switchs com portas para diferentes tecnologias, quer de LAN quer de WAN (por exemplo X.25, ATM e Frame Relay) e para vários suportes físicos (por exemplo 100-Base-TX ou 100-Base-SX). Encaminhadores (routers) Os encaminhadores (routers) são equipamentos que possibilitam a interligação de redes autónomas, quer redes locais (LANs), quer redes de área alargada (WANs) operando ao nível da camada de rede do modelo OSI (nível 3). Figura 29 - Mapeamento da função router no modelo OSI (Nota: Não confundir router com gateway, os gateways são peças de software que operam nos níveis 5, 6 e 7 do modelo OSI, e que serão tratados no ponto seguinte.) As características principais destas máquinas são o suportarem diversos protocolos (IP, IPX, CLNP, X.25, RP, DDP, etc.) e tecnologias de rede (Ethernet, Token Ring, etc.), oferecerem capacidade de gestão de rede e de tráfego entre redes. Os routers possuem diversas portas/ interfaces que têm que ser configuradas com o respectivo protocolo a aplicar e com os endereços definidos na arquitectura da rede. O encaminhamento efectua-se à custa de tabelas que mantêm a informação do encaminhamento a dar aos pacotes que circulam na rede, e que obedecem a uma de várias políticas de encaminhamento possíveis, opção do administrador da rede. As políticas e formas de encaminhamento e de roteamento saem fora do âmbito da disciplina, pelo que não vão ser abordadas com detalhe, contudo serão abordadas aquando do tratamento da arquitectura TCP/ IP. Gateways Os gateways são módulos de software que permitem compatibilizar diferentes tipos de ambientes de rede, podem alterar completamente a mensagem Carlos Silva/João Constantino enviada por uma aplicação, por forma a torná-la compreensível pelo destinatário e são módulos instalados em máquinas (PC) que podem ser autónomas. Figura 30 - Mapeamento da função gateway no modelo OSI 08-01-2004 Página 48
Download