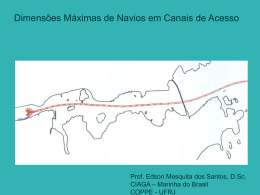
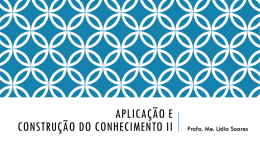
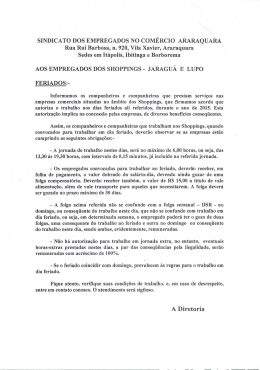
MODELAGEM E SIMULAÇÃO COMPUTACIONAL DA NÃO LINEARIEDADE DE FOLGA EM UM ROBÔ GANTRY Odair Menuzzi1, Eduardo Padoin 2, Antonio Carlos Valdiero 3, Antonio Luis Rasia4 1 UNIJUÍ, Caixa Postal 121, Av. Rudi Franke, 540, CEP 98280-000, Panambi - RS, Brasil, [email protected]. UNIJUÍ, Caixa Postal 121, Av. Rudi Franke, 540, CEP 98280-000, Panambi - RS, Brasil, [email protected]. 3 UNIJUÍ, Caixa Postal 121, Av. Rudi Franke, 540, CEP 98280-000, Panambi - RS, Brasil, [email protected]. 4 UNIJUÍ, Caixa Postal 121, Av. Rudi Franke, 540, CEP 98280-000, Panambi - RS, Brasil, [email protected]. 2 Resumo: Trata-se da modelagem matemática e da simulação computacional dos efeitos da não linearidade de folga no acionamento de uma transmissão tipo fuso de um robô Gantry. A modelagem matemática da folga pode contribuir para estratégias de controle preciso e para melhoria do desempenho de robôs de baixo custo. Palavras-chave: modelagem matemática, não-linearidade de folga, manipulador robótico Gantry. 1. INTRODUÇÃO Este trabalho trata do problema de modelagem matemática e simulaçao computacional da não linearidade de folga (backlash) em transmissões mecânicas do tipo fuso (parafuso de potência), comuns no acionamento das juntas prismáticas de robôs Gantry [1, 2, 3, 4]. Tais robôs têm grande potencial de aplicação nas indústrias do setor metal mecânico, principalmente devido à sua estrutura rígida, seu amplo espaço de trabalho em mesas e a facilidade de programação proveniente do desacoplamento dinâmico entre o movimento de seus elos. Um dos problemas que dificultam o controle preciso dos movimentos de um robô Gantry é a não linearidade de folga no acionamento, principalmente nas transmissões mais simples e baratas do tipo fuso roscado. Atualmente há duas formas de acionamento das juntas de robôs industriais. Uma é o acionamento direto (directdrive), onde o motor é montado diretamente no eixo da junta e que de acordo com Turner et al. [5] não é o ideal para motores elétricos, pois a ausência de uma relação de redução do movimento leva à necessidade de motores elétricos especiais com menor rotação e maior torque, além de sujeitá-lo aos efeitos dinâmicos do acoplamento. A outra forma de acionamento, que é a mais tradicional e simples, é a utilização de transmissões por engrenagens entre os motores e as juntas, as quais possuem como vantagens a menor carga no motor, maiores rotações no motor e a facilidade de posicionamento deste no braço do robô. A desvantagem deste tipo de acionamento é a presença de atrito e a folga nas transmissões de engrenagem. De acordo com Ross et al. [6], na seleção ótima de uma transmissão por engrenagens para aplicações em mecatrônica, a escolha do tipo depende de muitos fatores, onde os mais importantes são velocidade de entrada, folga, eficiência e custo. Em geral a transmissão de custo menor tem a maior folga, então ou se aumenta o custo ou se compensa a não linearidade de folga no esquema de controle. O importante é se chegar a uma solução de compromisso (trade-off), equilibrando os custos de fabricação e os custos de implementação de controle com compensação das não linearidades. Valdiero [7] aponta a importância do estudo das não linearidades dos sistemas mecânicos, os quais causam limitações no desempenho do controle preciso, destacandose a zona morta, o atrito, histerese e a folga (backlash). Dentro deste contexto, vários trabalhos [8, 9, 10, 11] têm tratado da modelagem, da identificação e da compensação da não linearidade de folga. Nordin e Gutman [8] comentam que a folga é uma das mais importantes não linearidades que limitam o desempenho do controle de posição e velocidade em aplicações industriais e da robótica. A revisão bibliográfica realizada por estes autores indica que ainda há muita pesquisa a ser feita para síntese e análise da compensação de folga no controle de sistemas mecânicos. Vörös [10] apresenta uma nova forma analítica de descrição do modelo matemático da não linearidade de folga que utiliza funções de chaveamento e mostra os resultados de simulação computacional da identificação dos parâmetros. Hägglund [11] descreve um novo método para detecção e estimativa da não linearidade de folga em válvulas de controle que sofreram desgaste. Ele utiliza como modelo a função descritiva da folga e comenta que a facilidade de compensação desta não linearidade depende de sua inversa. Selmic e Lewis [12] apresentam um esquema de compensação para folgas com inversão da dinâmica utilizando a técnica do backstepping com redes neurais. Um modelo geral da folga é usado e permite assimetria. Cazarez-Castro et al. [13] apresenta uma combinação de lógica fuzzy e algoritmos genéticos na busca pela solução do problema de regulação da saída de servomecanismos com não linearidade de folga. Os dados para simulação foram obtidos a partir de uma bancada experimental de testes que envolve um motor DC ligado a uma carga mecânica por 1 Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 214 MODELAGEM E SIMULAÇÃO COMPUTACIONAL DA NÃO LINEARIEDADE DE FOLGA EM UM ROBÔ GANTRY Odair Menuzzi, Eduardo Padoin, Antonio Carlos Valdiero, Antonio Luis Rasia meio de uma transmissão do tipo trem de engrenagens e com folga. Giri et al. [14] apresenta proposições para a identificação de sistemas lineares com a presença da não linearidade de folga a partir da parametrização apropriada do sistema, a estimativa dos parâmetros pela técnica dos mínimos quadrados e a especificação de padrões de sinais de entrada. Shahnazi et al. [15] propõe um controlador adaptativo combinado com lógica fuzzy para melhorar a robustez do controle feedback de sistemas com a presença de não linearidades tais como sistemas mecânicos com folga no acionamento. Da mesma forma que Morales-Velazquez et al. [16] propõe melhorias do controle de máquinas ferramenta com controle numérico computadorizado (CNC) utilizando plataformas de baixo custo e a identificação dos parâmetros do modelo do servo sistema, o propósito deste trabalho é apresentar uma proposta prática de modelagem matemática e simulacão computacional dos parâmetros de folga em transmissões mecânicas do tipo fuso (parafuso de potência) para futura aplicação no controle e compensação de robôs Gantry. Este artigo se organiza de tal forma que na seção 2 é apresentada a descrição do robô Gantry e do acionamento tipo fuso de uma junta. A seção 3 apresenta a modelagem matemática de uma junta robótica incluindo-se a não linearidade de folga tal como proposta por Tao e Kokotovic [17], na seção 5 é descrito a simulação computacional, que contém alguns resultados numéricos obtidos no Matlab/Simulink; e por fim apresentam-se as conclusões na seção 6. 2. DESCRIÇÃO DO ROBÔ GANTRY E ACIONAMENTO TIPO FUSO DE UMA JUNTA DO Fig. 1 – Manipulador robótico Gantry [4]. Esta seção descreve de forma sucinta o manipulador robótico de estrutura cinemática tipo Gantry, cujo desenho característico é mostrado na Fig. 1. O robô Gantry é considerado o tipo de manipulador mais robusto. Tem a cinemática mais simples entre os tipos comuns de robôs industriais por utilizar três juntas prismáticas (J1, J2 e J3) e, em alguns casos, uma junta rotativa (J4) para a orientação do efetuador final (garra robótica ou ferramenta). Um tipo de transmissão muito utilizada em juntas prismáticas é o conjunto de fuso e porca (ou parafuso também chamado parafuso de potência), mostrado na Fig. 2. Este tipo de transmissão apresenta alta capacidade de carga, sendo comum em manipuladores robóticos do tipo Gantry e é o objeto de estudo da não linearidade de folga neste trabalho. As transmissões de um robô têm papel muito importante na precisão de posicionamento do manipulador, muitas vezes é preciso reduzir ou amplificar o movimento nos atuadores, visando-se obter a resposta desejada e requerida na realização das tarefas programadas. Existem diversas características não lineares na dinâmica desses sistemas de transmissão mecânica que dificultam o controle preciso e prejudicam seu desempenho, entre as quais destacam-se o atrito dinâmico e a folga. Fig. 2 – Transmissão tipo fuso utilizada no acionamento de juntas prismáticas em manipuladores robóticos. A Figura 3 mostra um desenho esquemático do acionamento de uma junta prismática. O motor elétrico (1) aplica um torque Tm no fuso (2) resultando num deslocamento angular θm, medido por um encoder (3). Ao girar o fuso o movimento de rotação do mesmo se converte no deslocamento linear y de uma massa M. 2 Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 215 Fig. 3 – Acionamento tipo fuso de uma junta prismática do robô. giro do fuso. O torque devido à força de reação da massa deslocada sobre o fuso é dado por: A não linearidade de folga acarreta fortes variações das parcelas dinâmicas e resultam em efeitos de degradação do desempenho do seguimento de trajetória. Na seção seguinte apresenta-se a modelagem matemática para esta junta robótica com a não linearidade de folga. (4) Da mesma forma, pode-se deduzir as equações da dinâmica do movimento linear da massa: 3. MODELAGEM MATEMÁTICA (5) A formulação do modelo matemático de uma junta prismática do robô Gantry pode ser obtida pelo método Newton-Euler [2] a partir do equilíbrio dinâmico nos diagramas de corpo livre do eixo-fuso e da porca-massa deslocada. A Figura 4 mostra o diagrama de corpo livre do eixo-fuso. (6) (7) onde By é o coeficiente do atrito viscoso da massa, M é a massa e y é o deslocamento linear da junta prismática. Se não houvesse a imperfeição de folga no sistema dinâmico, a relação entre o deslocamento linear da junta prismática e o giro do eixo motor poderia ser escrita como: (8) Considerando o caso de não haver folga, poder-se-ia substituir as derivadas da Eq. (8) em (7) e combinar este resultado com a Eq. (3), resultando numa única equação diferencial ordinária de segunda dada por: Fig. 4 – Forças atuantes no fuso. Pela aplicação das leis do equilíbrio dinâmico, obtem-se as seguintes relações matemáticas: (9) (1) (10) (2) Entretanto devido à existência da não linearidade de folga, cada uma das equações diferenciais de segunda ordem, Eq.s (3) e (7), não podem ser combinadas e necessita-se de uma relação matemática que represente a relação entre o deslocamento linear da junta, y, em função do deslocamento angular do motor, θm , na presença da folga. Uma revisão bibliográfica na literatura recente [8, 9, (3) é o torque motor, J é o momento de inércia de todo onde conjunto em rotação (fuso e eixo motor), Bθ é o coeficiente do atrito viscoso do eixo, p é o passo do fuso, Fu é a força de reação da massa deslocada sobre o fuso, m é o ângulo de 3 Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 216 MODELAGEM E SIMULAÇÃO COMPUTACIONAL DA NÃO LINEARIEDADE DE FOLGA EM UM ROBÔ GANTRY Odair Menuzzi, Eduardo Padoin, Antonio Carlos Valdiero, Antonio Luis Rasia 10, 11, 12, 13, 14, 15, 17, 18], que trata da não linearidade de folga, permitiu a formulação desta relação matemática para a transmissão tipo fuso. Adaptando-se o modelo proposto por Tao e Kokotovic [17], descreve-se a folga a partir das seguintes equações: 4. RESULTADOS COMPUTACIONAL DE SIMULAÇÃO Esta seção apresenta uma descrição detalhada da metodologia utilizada na implementação da simulação computacional do modelo matemático para uma junta prismática de um robô Gantry com a presença da não linearidade de folga, os parâmetros adotados para o sistema e os resultados de simulação. A simulação numérica do modelo proposto foi implementada com o auxílio da ferramenta computacional MatLab/Simulink, utilizando-se o método de integração Runge-Kuta com passo de 0,0001 segundos.. Os parâmetros do modelo matemático da folga, descrito pela Eq. (11), e utilizados nas simulações computacionais foram determinados a partir de uma bancada experimental e estão apresentados na Tab. 1. (11) onde m é a relação de transmissão, cl e cr são constantes, e vl e vr são funções de projeções dadas pela equação (12). (12) A Figura 5 mostra um desenho esquemático da não linearidade de folga e a representação gráfica do modelo matemático dado pela Eq. (11). Tabela 1- Parâmetros do modelo da folga obtidos de uma bancada experimental. Descrição dos Parâmetros Passo do fuso p Relação de transmissão m Intervalo de folga à direita cr Intervalo de folga à esquerda cl Entrada posição angular θm Posição inicial da carga y(t=0) Valores 5 mm = 5 x 10-3 m 7,957 x 10-4 m/rad 1,57 rad -1,57 rad variando 1,25 x 10-3 m Inicialmente foi realizada apenas a simulação do modelo de folga, dado pela Eq. (11) e implementado por meio do diagrama de blocos apresentado na Fig. 6, com interesse de observar as características da não linearidade de folga da saída do movimento (y) em relação às posições de entrada (θm). Fig. 5 – Não linearidade da folga: desenho esquemático e representação gráfica do modelo proposto. Fig. 6 – Diagrama de Blocos do modelo matemático da não linearidade de folga para uma transmissão tipo fuso. 4 Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 217 A Figura 7 é resultado da simulação computacional do modelo matemático implementado no diagrama de blocos da Fig. 6 sob às condições iniciais e parâmetros da Tab. 1. Em seguida foram realizadas as simulações computacionais do diagrama de blocos da Fig. 8 que representa o acionamento de uma junta prismática tipo fuso de um robô Gantry. Neste diagrama de blocos foram implementadas as equações (9), (10) e (11). Na simulação computacional foram utilizados os parâmetros da folga, dados pela Tab. 1, e do braço robótico, dados pela Tab. 2. 15 teta(rad) y(m)*1e3: sem folga y(m)*1e3: com folga erro(m)*1e3 10 Tabela 2- Parâmetros do Robô Gantry considerando o movimento de uma junta prismática. 5 Descrição dos Parâmetros Momento de Inércia do eixo motor J Massa da carga M Coeficiente de amortecimento viscoso do eixo motor Bo Coeficiente de amortecimento viscoso da massa By Torque do motor Tm 0 -5 -10 -15 0 2 4 6 8 Tempo (s) 10 12 14 16 Valores 9,331 x 10-5 kg.m2 0,5 kg 1 N.m.s 1 N.s/m Variando linearmente e de forma alternada Fig. 7 – Resultado de simulação computacional do modelo da folga. Fig. 8 – Diagrama de Blocos do modelo dinâmico de uma junta prismática de um robô Grantry com a não linaeridade de folga. 5 Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 218 MODELAGEM E SIMULAÇÃO COMPUTACIONAL DA NÃO LINEARIEDADE DE FOLGA EM UM ROBÔ GANTRY Odair Menuzzi, Eduardo Padoin, Antonio Carlos Valdiero, Antonio Luis Rasia Os resultados numéricos da simulação dos movimentos da junta robótica são apresentados na forma do gráfico da Fig. 9. teóricos a partir de modelos ideais, havendo uma lacuna para pesquisa a partir da observação e validação experimental com compensação da folga e minimização de seus efeitos. teta(rad) y(m)*1e3: sem folga y(m)*1e3: com folga erro(m)*1e3 20 15 AGRADECIMENTOS Os autores são agradecidos à UNIJUÍ pela estrutura laboratorial disponível e às diversas agências que tem apoiado finaceiramente a pesquisa, tais como a FAPERGS, FINEP/MCT, SEBRAE, CNPq e CAPES. 10 5 0 REREFÊNCIAS -5 [1] D. V. Hunt, “Industrial Robotics Handbook”, Industrial Press, pag. 427, New York, 1983. [2] L. Sciavicco and B. Siciliano, “Modeling And Control of Robot Manipulators”, McGraw-Hill, Naples, 1996. [3] A. Cupido, R. Sala and S. Milanesi, “Sistemi Ed Automazione Industriale”, Vol. 3, Bologna, 1996. [4] S. Paatz, “Anatomy of a Robot”, Engineering & Technology, p. 42-44, 2008. [5] P. J. Turner, P. Nigrowsky and P. Vines, “A New Approach for the Design of Robot Joint Transmission”, Mechatronics, 2001. [6] F. Ross, H. Johansson and J. Wikander, “Optimal selection of motor and gearhead in mechatronic applications”, Mechatronics, p. 63-72, 2006. [7] A. C. Valdiero, "Hydraulic Robot Control with Friction Compensation" (In Portuguese), PhD Thesis, Mechanical Engineering Department, Federal University of Santa Catarina, Brazil, 2005. [8] M. Nordin and P. O. Gutman, “Controlling mechanical systems with backlash _ A survey”, Automatica, 38(10), p. 1633-1649, 2002. [9] R. Dong and Y. Tan, Y., “A Gradient Based Recursive Identification of Mechanical Systems with Backlashlike Hysteresis”; 18th IEEE International Conference on Control Applications Part of 2009 IEEE Multiconference on Systems and Control Saint Petersburg, Russia, 2009. [10] J. Vörös, “Modeling and identification of systems with backlash”, Automatica, 2009. [11] T. Hägglund, T., “Automatic on-line estimation of backlash in control loops”, Journal of Process Control, 17(6), p. 489-499, 2007. [12] R. R. Selmic and F. L. Lewis, “Neural net backlash compensation with Hebbian tuning using dynamic inversion”, Automatica, Vol. 37, p. 1269-1277, 2001. [13] N. R. Cazares-Castro, L. Aguilar and O. Castilho, “Fuzzy Logic Control with Genetic Membership Function Parameters Optimization for the Output Regulation of a Servomechanism with Nonlinear Backlash”, Expert Systems with Applications, p. 3-6, 2009. [14] F. Giri, Y. Rochdi, F. Z. Chaoui and A. Brouri, “Identification of Hammerstein systems in presence of hysteresis-backlash and hysteresis-relay nonlinearities”, Automatica, p. 2-7, 2008. [15] R. Shahnazi, N. Pariz and A. V. Kamyad, “Adaptive fuzzy output feedback control for a class of uncertain -10 -15 -20 0 2 4 6 8 Tempo (s) 10 12 14 16 Fig. 9– Resultado de simulação computacional do modelo matemático da junta prismática do robô Gantry incluindo-se a não linearidade da folga. Os resultados mostrados nas figuras 7 e 9 permitem a observação de algumas características importantes da não linearidade de folga. Note que diante da periocidade da entrada (θm), a saída do movimento (y) apresenta as características fundamentais de atraso de fase e de perda de movimento nos trechos de pico da entrada. Diante dos resultados destas simulações do sistema dinâmico em malha aberta, percebe-se a importância da modelagem matemática e da identificação da folga em transmissões mecânicas. O conhecimento das características desta não linearidade nos sistemas mecânicos permite a elaboração de esquemas de compensação nas estratégias de controle e consequentemente a melhoria do desempenho nas tarefas industriais que exigem precisão e repetibilidade. 5. CONCLUSÃO Neste trabalho foram apresentadas a modelagem matemática e as simulações computacionais do acionamento de uma junta prismática de um robô tipo Gantry, onde ocorre a presença da não linearidade de folga. Desenvolveuse o modelo matemático da junta robótica incluindo-se a não linearidade de folga. Os testes e simulações computacionais mostrados neste trabalho ilustram o comportamento da não linearidade de folga e suas principais características, tais como o erro de seguimento de posição, o atraso de fase e a perda de movimento nas inversões de velocidade. Os resultados demonstram a importância da compensação da folga, ressaltando os aspectos de desempenho do posicionamento. Como perspectivas futuras, pretende-se realizar os testes experimentais do protótipo de uma junta prismática tipo fuso na bancada disponível na UNIJUÍ Campus Panambi e estudar um procedimento de identificação desta não linearidade com base nos trabalhos apresentados na literatura internacional recente [9, 10, 11, 13, 14, 17, 18]. Entretanto estes trabalhos apresentam apenas resultados 6 Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 219 nonlinear systems with unknown backlash-like hysteresis”, Commun Nonlinear Sci Numer Simulat, p. 6-10, 2009. [16] L. Morales-Velazquez, R. J. Romero-Troncoso, R. A. Osornio-Rios, G. Herrera-Ruiz and J. J. Santiago-Perez, “Special purpose processor for parameter identification of CNC second order servo systems on a low-cost FPGA platform”, Mechatronics, 2009. [17] G. Tao and P. V. Kokotovic, “Adaptative control of systems with actuator and sensor nonlinearities”, John Wiley & Sons, p. 294, New York, 1996. [18] R. Dong, Y. Yonghong, 2009, “A Gradient Based Recursive Identification of Mechanical Systems with Backlash-like Hysteresis”; 18th IEEE International Conference on Control Applications Part of 2009 IEEE Multi-conference on Systems and Control Saint Petersburg, Russia. 7 Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 220
Baixar