ANÁLISE HARMÔNICA
DE SINAIS
Prof. M.A.Garms
UNIP - 2013
Índice Geral
1- Estudo de sinais............................................................................................ 2
2- Serie de Fourier........................................................................................... 11
3- Transformada de Fourier............................................................................. 23
4- Convolução...................................................................................................44
5- Sistemas e Classificação..............................................................................51
6- Espectro e densidade de Energia..................................................................61
7- Transformada Discreta de Fourier...............................................................68
8- Bibliografia...................................................................................................78
1
1- ESTUDO DE SINAIS
Neste capítulo introdutório abordaremos alguns conceitos básicos para o estudo de sinais.
Conceitos básicos
Definição
Um sinal é uma função que representando uma quantidade física ou variável, e
tipicamente ela contém informações sobre o comportamento ou natureza do fenômeno.
Assim, um sinal é qualquer função que carrega alguma informação.
Inicialmente consideraremos apenas sinais nos quais a variável independente é o tempo.
Classificação de Sinais
Basicamente sinais podem ser divididos em:
Contínuo no tempo e Discreto no tempo
Analógico e Digital
Periódico e Não periódico
Energia e potência
Determinístico e probabilístico
Sinais Contínuos: Um sinal g (t) é contínuo no tempo se t é uma variável continua.
A representação deste tipo de sinal é mostrada na figura a seguir:
g(t)
t
2
Sinais Discretos:
Se t é uma variável discreta, em que x(t) é definido em tempo discreto, então x(t) é um
sinal discreto no tempo.
Assim um sinal discreto no tempo é definido com tempos discretos, e um sinal discreto no
tempo pode ser identificado como uma sequência de números, determinados por xn ou
x n , onde n = nº inteiro.
A representação deste tipo de sinal é mostrada na figura a seguir:
x n
2
1
● ●
-5 –4 –3 –2 –1 0
●
●
1 2 3 4 5
Sinais periódicos e aperiódicos
Um sinal v(t) é periódico com período T se v (t ) v (t mT ) onde m é inteiro. Tal sinal se
repete a cada intervalo de T segundos denominado período.
Um sinal será aperiódico caso não haja esta repetição.
Sinais de energia e sinais de potência
Ver capítulo 6.
Sinais Reais e Complexos
Sinais Reais assumem valores no conjunto de números reais ou seja x ( t ) R
Sinais Complexos assumem valores no conjunto de números complexos ou seja x (t ) C.
Sinais complexos são usualmente usados em comunicações para modelos de sinais que
necessitam ser representados pela sua amplitude e fase.
3
Sinais Determinísticos e Probabilísticos (Aleatórios)
Sinais Determinísticos
São descritos por funções no sentido matemático usual tendo como variável independente
o tempo t .
Dessa forma conhecendo a função que descreve um sinal determinístico pode-se obter o
valor assumido por ele em qualquer instante de tempo t desejado.
Sinais Probabilísticos (Aleatórios)
Tem sempre associado a ele um elemento de incerteza, não sendo possível em um
determinado instante qualquer, determinar o seu valor exatamente.
Entretanto é possível descrever este sinal em termos de suas propriedades na média, como
por exemplo, a potência média, o seu valor médio, a probabilidade de sua amplitude
exceder um determinado valor e assim por diante.
Em outras palavras, é possível descreve-lo por meio de um modelo probabilístico que
chamamos de processo aleatório.
4
Exemplo de um processo aleatório:
O exemplo nos leva a conclusão que o sinal ( forma de onda ) gerada em um dos
terminais do sistema pode ser considerado tanto um sinal determinístico como um sinal
aleatório.
Para um operador que conhece a mensagem a ser transmitida, o sinal será perfeitamente
determinístico, enquanto, para outro observador que não tem o conhecimento da
mensagem, o sinal terá um caráter aleatório.
Vale ressaltar que o conhecimento das regras probabilísticas que regem um certo
fenômeno, ou seja o conhecimento de um modelo probabilístico completo, é bastante
raro. Normalmente tem-se um conhecimento parcial ou até um total desconhecimento
dessas regras.
Entretanto, há a possibilidade de se realizar medidas, pelo menos durante um intervalo de
tempo finito, dos sinais envolvidos. Uma vez que algumas medidas tenham sido
coletadas, elas podem ser usadas para propor um modelo probabilístico que deve
descrever os sinais envolvidos.
5
Revissão de Núm
meros Comp
plexos
Álgeb
bra dos Nú
úmeros Com
mplexos
O núúmero compplexo z = a + jb pode ser represenntado graficcamente porr um ponto cujas
coorddenadas carttesianas sãoo (a, b) em uum plano coomplexo, vidde figura abbaixo.
mente a parrte real e a parte
Os nnúmeros a ((= abcissa) e b (= ordeenada) são respectivam
imaginária do núúmero compplexo z:
a Reaal z
b Imag z
m expressar oos númeross complexoss em termoss de coordennadas polarees. Se
Pode-se também
ordenadas poolares de um
m ponto z = a + jb, entãão:
(r , ) são as coo
a r cos
b jrsen
n )
Logoo se tem: z a jb r cos jrrsen r (ccos jsen
Destaa última exppressão obtéém-se a form
ma polar z r
de representaçãão de um núúmero
compplexo.
Por ooutro lado, do Cálculoo sabe-se quue os polinôômios de orrdem abaaixo listadoos são
repreesentações ddas funções exponencial, cosseno e seno:
e j 1 j
1 j
( j ) 2 ( j ) 3 ( j ) 4 ( j ) 5
...
2!
3!
4!
5!
2
2!
j
3
3!
4
4!
j
5
5!
6
....
cos 1
2
sen
2!
3
3!
4
4!
5
5!
6
6!
7
7!
8
8!
...
9
9!
...
Fazenndo a interaação entre esstes polinôm
mios resulta::
e j coss jsen
Na fiigura seguinnte apresentta-se no plaano complexxo este resuultado denom
minado relaação de
Eulerr.
Assim
m um númeero complexo tem divversas representações das
d quais ass que estuddamos
podem
m ser resum
midas na segguinte expreessão:
z a jjb r
j
re senddo
r a2 b2
arctg
ou
a r coos
b jrsen
b
a
uação diferrencial d2y((t)/dt2 + y(t))=0
A equ
A funnção exponeencial compplexa ejt é soolução de d2yy(t)/dt2 + y((t)=0 pois:
7
d 2 jt d
d2
2 jt
jt
jt
e ( je ) j e -e ou 2 y y
dt
dt 2
dt
Outra solução desta equação diferencial é a função e-jt, pois:
d 2 jt d
d2
2 jt
jt
jt
e ( je ) j e -e
ou 2 y y
dt
dt 2
dt
Assim a combinação linear destas soluções será solução da mesma equação diferencial
d2y(t)/dt2 + y(t)=0 (princípio da superposição válido para este tipo de equação diferencial
linear a coeficientes constantes). Sendo assim considere as seguintes soluções:
y (t ) 0.5e 0.5e
jt
jt
e jt e jt cos t jsen t cos t jsen t
cos t
2
2
e
y (t ) 0.5 je jt 0.5 je jt
e jt e jt cos t jsen t cos t jsen t
sen t
2j
2j
Isto mostra que as exponenciais complexas são “equivalentes” às funções seno e
cosseno, pois fazem parte do conjunto de soluções da equação diferencial
d2y(t)/dt2 + y(t)=0.
Em suma pode-se considerar a exponencial complexa como solução de equações
diferenciais lineares a coeficientes constantes e “projetá-la” no eixo real para obter a
solução no domínio real.
~
Fasores e resolução de circuitos elétricos em regime senoidal ( x(t) =
)
Consegue-se uma simplificação na análise de equações diferenciais lineares, ou mais
especificamente no caso de engenharia elétrica, por exemplo, na análise de circuitos RLC
(que servem de base inclusive para modelos equivalentes de dispositivos eletrônicos),
representando senóides como exponenciais complexas.
Para mostrar as vantagens deste processo vamos discutir um gerador de corrente senoidal
descrito por:
i A cos(t ) A
e j (t ) e j (t )
Real Ae j e jt
2
Considere-se então o efeito da aplicação desta corrente ao circuito RLC (figura seguinte).
Define-se a corrente I como um número complexo que tem módulo igual à amplitude da
senóide e argumento igual à fase da senóide, isto é:
8
I I e j i Ie j t , com I A e
I
Sabe-se que:
di 1
v Ri L idt
dt C
1
d
RIe jt L Ie jt Ie jt dt
dt
C
R i C Então:
L
1 j t
Ie
Ve jt R jL
jC
onde
1
I ZI Z e j I e j Z I e j ( )
V R jL
j C
j
Onde a grandeza Z Z e , é um número complexo (fasor), denominada impedância:
1
j
Z R j L
Ze
C
sendo
1
Z R 2 L
;
C
tg 1
L
1
C
R
A aplicação de I * | I | e j (conjugado de I) ao mesmo circuito conduziria ao resultado
V * (Z .I )* Z *V * | Z | e j | I | e j | V | e j ( ) .
Como vale o princípio de superposição pode-se garantir que:
v
ou
1
Ve jt V * e jt Real Ve jt Real Z e j I e j e jt
2
v Z A cos t
Portanto, |Z| altera a amplitude de v por multiplicação e altera sua fase por adição.
9
Pode-se observar que a solução se transformou em um problema algébrico devido ao fato
de que, para os sinais exponenciais, a derivação se transformou numa operação de
multiplicação por j, e a integração em uma divisão por j.
A maneira geral de resolver os problemas pode agora ser metodizada pelos seguintes
estágios:
(1) Passagem das excitações senoidais para números complexos correspondentes, que
podem ser designados como seus transformados.
(2) Solução do problema no campo transformado dos números complexos – fasores,
isto é, solução do problema algébrico.
(3) Passagem de volta dos transformados para as soluções explicitas.
Depois de um pouco de prática, os estágios 1 e 3 podem ser mantidos implícitos, e as
soluções e interpretações relizadas inteiramente no campo complexo, isto é, do modo como
realmente ocorrem na analise de circuitos elétricos em corrente alternada (senoidal).
Exercícios
1) Mostre que:
e j e j
a) cos
; 2
e j e j
b) sen
2j
c) cos( A B ) cos AsenB cos BsenA
2) Mostre que r cos(t ) A cos t Bsen t com r
A 2 B 2 e tg 1
B
.
A
3) Mostre que:
2
a)
b)
2
2
2
sen
mx
sen
kx
dx
0
0 cos mx cos kx dx mk
cos mx sen kx dx 0
0
sen mxdx cos mxdx 0
0
2
c)
0
Observação: símbolo de delta de Kronecker é definido como sendo mk 1 para m = k e
mk 0 para m k.
4) Represente z* na forma polar. Observação: define-se a operação de conjugação de um
número complexo z a bj
a 2 b 2 e
jtg 1 b
Conjugado z z* z a jb
10
a
como sendo:
2- SÉRIE DE FOURIER ( xp(t) =
)
Resumindo, sinal é um dos elementos básicos em Eletrônica. Traz inerente a si, através de
manipulações convenientes que a ele associamos, a informação. A análise matemática dos
sinais pode ser feita no domínio de frequência ou do tempo. Em nosso estudo, esta análise
será feita no domínio de frequência, onde as técnicas matemáticas são mais simples e
significativas.
~
Os sinais podem ser determinísticos ou aleatórios. Sinal determinístico é aquele em que o
sinal é uma função bem determinada do tempo; é aleatório quando o sinal estiver na
dependência de uma função probabilística. Quando o sinal for determinístico periódico,
emprega-se Série de Fourier, como caracterização do sinal no domínio de frequência. Para
sinais determinísticos aperiódicos emprega-se a teoria de probabilidade.
Sinais determinísticos periódicos
Um sinal f(t) é dito periódico, quando for válida a relação:
f (t ) f (t nT )
onde n = 0, 1, 2, ... e T é o período.
Uma função periódica que obedece às condições de Dirichlet pode ser desenvolvida em
série de Fourier. Tais condições são:
a) f(t) é definida num intervalo (a, b)
b) número finito de máximos e mínimos em (a, b)
c) número finito de descontinuidades em (a, b)
d) possuir derivada à direita e à esquerda do ponto de descontinuidade.
Série trigonométrica de Fourier (de senos e cossenos)
Uma função f(t) periódica pode ser desenvolvida por uma combinação linear de senos e
cossenos:
f (t )
a0
(a n cos n 0 t bn sin n 0 t )
2 n1
(1)
é a frequência angular fundamental.
onde
Um modo equivalente de se escrever a relação (1) é o seguinte - série trigonométrica de
Fourier (de cossenos):
f (t ) E 0 E n cos(n 0 t n )
n 1
sendo que
E0
a0
1 bn
2
2
, E n a n bn e tg
.
an
2
11
Dada uma função periódica, para expressá-la em série de Fourier só é necessário a
determinação dos coeficientes de Fourier (an, bn) que são obtidos utilizando-se da
ortogonalidade das funções seno e cosseno.
Ortogonalidade do seno e do cosseno.
As propriedades de ortogonalidade, do seno e cosseno são:
2
d)
e)
2
sen mx sen kx dx cos mx cos kx dx
0
2
sen mxdx cos mxdx 0
(2)
0
2
0
mk
0
(3)
2
f)
cos mx sen kx dx 0
(4)
0
Lembrando que o símbolo delta de Kronecker é definido como sendo
mk 1 para
mk 0 para mk.
Determinação dos coeficientes de Fourier
a) Cálculo de a0
Integrando-se ambos os lados da expressão (1), resulta:
2 a
0
f
t
d
t
(
)
(
)
(a n cos n0 t bn sin n0 t ) d (0 t )
0
0
0 2
n 1
a 2
a
1 2
0 d (0 t ) 0 2 a0 a0 f (t )d (0 t )
2 0
2
0
2
Mas a 0
1
2
0
f (t ) d ( 0 t )
1
2
0
1 2
2
f (t ) d
t a0
T
T
T
0
f (t ) dt Finalmente obtém-se: a 0
2 T
f (t )dt T 0
(5)
Pela expressão (5) verifica-se que o termo a0/2 é o valor médio da função f(t).
b) Cálculo de ak para k0
Multiplicando ambos os lados da expressão (1) por cos k0t e integrando, resulta:
12
m=k e
2 a
0
f
(
t
)
cos
k
t
d
(
t
)
(
a
cos
n
t
b
sin
n
t
)
cos k0 t d (0 t )
0
0
n
0
n
0
0
0 2 n1
1 2
an kn ak ak f (t ) cos k0 t d (0 t )
2
n 1
0
Obtém-se assim o resultado final: ak
2 T
f (t ) cos k0 t dt
T 0
(6)
b) Cálculo de bn:
Utilizando procedimento análogo ao feito para o cálculo de an, obtém-se:
bk
2 T
f (t ) sen k0 t dt
T 0
(7)
Propriedades da série de Fourier trigonométrica
1. Para o cálculo dos coeficientes de Fourier de uma função periódica não é importante
aonde se inicia a integração, mas sim que a mesma seja efetuada dentro de um intervalo
correspondente a um período. Esta propriedade decorre do fato de que para sinais
periódicos (nas expressões abaixo f(t) é periódico de período 2/0), vale:
e
2. Uma função par a qual caracteriza-se por:
tem os coeficientes dos termos em senos da série de Fourier nulos.
3. Uma função impar é caracterizada por:
e, neste caso, os coeficientes dos termos em cossenos são nulos.
Exemplo 1
Desenvolver em série de Fourier Trigonométrica a onda quadrada.
13
Onda quadrada.
Como a função f(t) é impar, ela só terá os termos em senos no seu desenvolvimento da série
de Fourier:
Portanto
14
Série Exponencial de Fourier
A série exponencial pode ser escrita na forma exponencial:
(8)
o que pode às vezes resultar em cálculos matemáticos mais simples para a obtenção dos
coeficientes de Fourier.
A série exponencial em (8) pode ser obtida da série trigonométrica, substituindo-se na
expressão (1) as seguintes identidades:
e
Pode-se verificar então que:
(9)
(10)
(11)
Cálculo de An
Substituindo-se (5) a (7) nas expressões (9) a (11), resulta:
de onde
(12)
15
ou
(13)
As expressões (12) e (13) permitem o cálculo de An e são bastante gerais, pois podem ser
aplicadas para o cálculo de A0, fazendo-se n = 0, e de A-n substituindo-se por -n.
Propriedades da Série Exponencial de Fourier
1. An é um número complexo, portanto pode ser caracterizado por um módulo e uma fase:
(14)
(15)
(16)
2. An é complexo conjugado de A-n, ver (11).
3. Se
então
o que vale dizer que os coeficientes da série de Fourier são reais, ver (10) e (11).
4. Se
então
o que significa que os coeficientes da série são imaginários, ver (10) e (11).
Exemplo 2
Calcular a série de Fourier do pulso periódico.
16
Pulso periódico.
Utilizando a equação (1.12b), resulta:
logo
(17)
17
Espectros Discretos
O espectro serve para caracterizar um sinal periódico no domínio da frequência.
Espectro de amplitudes
É a representação gráfica das amplitudes das harmônicas em função da frequência.
Espectro de fases
É a representação gráfica das harmônicas em função da frequência.
Espectro Unilateral
Uma função periódica pode ser escrita na forma:
O gráfico de En em função da frequência (figura a) corresponde ao espectro unilateral de
amplitudes. O gráfico de n em função da frequência (figura b) corresponde ao espectro
unilateral de fases. Os espectros são ditos unilaterais porque são definidos no semi-eixo
positivo da frequência.
a) Espectro unilateral de amplitudes
b) Espectro unilateral de fases.
Exemplo 3 - Espectro Unilateral da onda Quadrada
No Exemplo 1 vimos que a série de Fourier correspondente à onda quadrada é:
o que pode-se reescrever na forma:
18
(18)
Utilizando a relação (18) podemos esquematizar o espectro de amplitudes e fases da onda
quadrada, que são apresentados nas figuras seguintes.
a) Espectro de amplitude da onda quadrada
b) Espectro de fases da onda quadrada
Espectro Bilateral
O espectro bilateral é a representação dos módulos e fases dos coeficientes An (série
exponencial) em função da frequência. Dele diz-se bilateral porque n varia de (-, ) e
desse modo utilizamos os semi-eixos positivo e negativo de frequência.
Um sinal periódico se representa em série de Fourier exponencial na forma:
e as figuras a e b mostram os espectros de amplitude e de fases em configuração bilateral.
Das propriedades já citadas dos coeficientes da série exponencial podemos concluir que o
espectro bilateral de amplitudes é uma função par e o seu espectro de fases correspondente
é uma função impar.
19
a) Espectro bilateral de amplitudes
Exemplo 3 - Espectro bilateral do pulso periódico.
b) Espectro bilateral de fases;
Do exemplo 2, relativo ao pulso periódico de largura, deduz-se que:
(19)
do qual pode-se reproduzir a representação espectral ilustrada na seguinte figura:
Espectro bilateral do pulso periódico.
No caso particular do pulso periódico preferimos representar em gráfico An e não |An| em
função da frequência, pelo fato de An ser real. Dessa maneira podemos condensar
simultaneamente a informação de amplitudes e fases num único - gráfico. Observamos da
20
figura anterior que a envoltória do espectro do pulso periódico segue a função (sen x) / x,
tendo pontos de nulos nas frequências múltiplas de 2 / .
Define-se normalmente uma largura de faixa para a transmissão do pulso periódico em
função da largura de pulso.
A largura de faixa em frequência (angular) de um pulso retangular periódico de largura
temporal pode ser aproximada à B = 2 / pois a maior parte da energia deste sinal está
contida no intervalo [0, 2 /] – note que amplitude das componentes senoidais neste
intervalo são “bem maiores” que as dos demais intervalos.
Análise Harmônica - Série de Fourier em circuitos RLC
Em virtude do principio de superposição, a mesma técnica de fasores pode ser aplicada a
sinais que sejam a soma de senóides ou de exponenciais complexas. A série de Fourier
permite então estender o procedimento visto para sinais senoidais a uma classe maior de
sinais que são os sinais periódicos, desde que satisfaçam condições de Dirichlet, pouco
restritivas na prática. O tratamento das componentes senoidais de um sinal periódico
qualquer é denominado análise harmônica de sinais periódicos.
Deste modo, uma função periódica pode ser escrita como:
f (t )
F e
n
n
jn 0 t
onde 0 = 2n/T é a frequência fundamental e os coeficientes Fn são dados por:
T
1 2
Fn
f (t )e jn0t dt
T nT
2
Cada componente pode então ser multiplicada por uma impedância, admitância ou função
de transferência para dar as componentes correspondentes da solução particular. Assim,
uma corrente de forma periódica pode ser escrita como:
i (t )
I
n
n
e jn0t
Esta corrente, atravessando uma impedância, causará a seguinte tensão:
v (t )
V e
n
com
n
jn 0 t
Vn I n Z (n0 )
Novamente, caso se deseje, é possível obter o sinal de tensão que realmente ocorre no
circuito tomando-se a parte real do resultado anterior.
21
Exercícios
1) Deduza a expressão (7) para o cálculo dos coeficientes bk da serie trigonométrica (de
senos e cossenos), ou seja:
bk
2 T
f (t ) sen k0 t dt
T 0
2) Obtenha os coeficientes da serie trigonométrica (senos e cossenos) de Fourier do sinal de
onda quadrada definida a seguir:
A
‐3/2 ‐/2 /2 3/2 5/2 0t
‐A
3) A partir das seguintes expressões da serie exponencial de Fourier e da serie
trigonométrica (de senos e cossenos) de Fourier:
f (t )
A e
n
n
jn 0 t
e f (t )
a0
(a n cos n 0 t bn sin n 0 t )
2 n 1
relacione os coeficientes A0 , An e An com os coeficientes a0 , a n e bn - ver expressões de
(9) a (11).
Prove também as expressões (12) e (13):
1
An
2
2
f (t )e
jn0t
0
T
1
d ( 0 t ) e An f (t )e jn0t dt
T0
4) Demonstre as expressões (15) e (16). Dica: use a expressão (10).
5) A partir das seguintes expressões da serie exponencial de Fourier e da serie
trigonométrica (de cossenos) de Fourier:
f (t )
A e
n
n
jn 0 t
e f (t ) E 0 E n cos n 0 t n
n 1
relacione os coeficientes A0 , An e An com os coeficientes E0 , E n e n . Compare com o
resultado do exercício (3).
22
~
3- TRANSFORMADA DE FOURIER – TF ( x(t) =
)
Vimos que a série de Fourier permite a análise de sinais periódicos pela sua decomposição
em sinais senoidais. A seguir a mesma técnica é generalizada para sinais aperiódicos,
chegando-se a Transformada de Fourier.
Quando os sinais ou excitações f(t) não são periódicos, não podem ser decompostos em
série de Fourier, e, portanto não podem ser caracterizados pelo espectro de frequência. Mas
seria útil se o mesmo procedimento pudesse ser estendido a sinais aperiódicos, pois assim
seria possível resolver uma família maior de problemas.
A extensão do procedimento com sinais periódicos para sinais aperiódicos pode ser feita
deixando o período T crescer indefinidamente. Condições suficientes para que isto possa
ser feito são as seguintes:
(1) Há um número finito de descontinuidades de f(t) em cada intervalo de tempo finito.
(2) Existe derivada a direita e a esquerda em cada ponto.
(3) As funções f(t) são de módulo integrável:
| f (t ) | dt finita.
A condição (3) exige que a função f(t) tenda para zero quando t = + com suficiente
rapidez. Agora, escreve-se:
o
2
T
Quando o período T cresce indefinidamente, tenderá para zero.
expressão (8), 0 por , tem-se:
f (t )
F e
jn t
(19)
n
n
Substituindo-se, na
Usando a expressão (13) e notando que a região de integração é realizada em todo intervalo
de um período da função, que agora é de - a +, resulta para o coeficiente Fn o seguinte:
Fn
2
f (t )e jnt dt
(20)
Vê-se que, a medida que o período T cresce, as frequências das componentes do espectro de
frequência ficam cada vez mais próximas e suas amplitudes diminuem. Para período
infinito, define-se a densidade de componentes harmônicas por unidade de frequência
(angular) como sendo:
23
F ( n )
Fn
1
( 20 ) F ( )
2
(19 )
f (t )
e
F ( n ) e
f (t )e jnt dt
(21)
jn t
(22) n
Obtém-se assim o espectro contínuo, que caracteriza os sinais aperiódicos. Pode-se dizer
que a função f(t) está sendo considerada como a superposição de uma infinidade de
componentes exponenciais (ou senoidais) com densidade F().
Estabelecendo-se = n e ( d) 0 nas expressões (22) e (21), obter-se-ia:
f (t ) F ()e jt d F ()
1
2
f (t )e
jt
dt
Entretanto, em engenharia o fator 1/2 normalmente é utilizado na definição da
antitransformada de Fourier (por que esta liberdade na definição é possível?). Assim
resultam as seguintes definições:
f(t) = F
-1
F () 1
2
F ()e
jt
d F() = F f (t )
f (t )e
jt
dt
ou
f (t )
1
2
jt
F ()e d F ()
f (t )e
jt
dt
(23)
Que são denominadas respectivamente de Antitransformada de Fourier da função F() e
Transformada de Fourier da função f(t).
Espectro contínuo em frequência do sinal f(t)
Pode-se escrever:
F ( ) F ( ) e
onde
j ( )
F ( ) é a amplitude e
F ( ) é a fase de F().
Desta forma necessita-se de um diagrama para a amplitude e outro para a fase para
representar F(), figura a seguir. Tais representações correspondem ao espectro continuo
em frequência do sinal f(t).
24
Magnitude e fase de um F() típico em função da frequência.
Como já discutido, uma função y(x) é par se y(-x) = y(x) e é impar se y(-x) = -y(x). Logo
esta figura indica que a magnitude de F() é uma função par e que a sua fase é impar.
Isto pode ser provado considerando-se que a função f(t) é real. Então, de (23):
F ( )
f (t )e jt dt F * ( )
n
f (t )e
j t
dt F ( )
n
Ou ainda: F ( ) F * ( ) F ( ) e
F ( )
F * ( )
F ( )
.
Portanto, pode-se afirmar que o espectro da amplitude é uma função par, pois
F ( ) F ( ) e que o espectro de fase é uma função impar, pois
F ( )
F ( )
.
Análise Harmônica de sinais aperiódicos
Costuma-se adotar o ponto de vista de considerar F() como uma função da frequência
angular associada a f(t), e chamá-la de representação de f(t) no domínio frequência.
Do mesmo modo que na serie de Fourier cada “componente senoidal de uma TF” (área sob
a curva da TF com largura d) deve ser multiplicada por uma impedância, admitância ou
função de transferência para se obter as componentes correspondentes da solução
particular. Por exemplo, a transformada de Fourier de uma dada corrente i(t) pode ser
escrita como:
1
I ( )
2
i(t )e
jt
dt
n
25
Esta corrente atravessando uma impedância Z irá causar uma queda de tensão que resulta
das seguintes operações:
V ( ) Z ( ).I ( ) v(t )
Z ( ).I ( ).e
jt
d
n
Este cálculo denominado análise harmônica de sinais aperiódicos é constituído dos
seguintes estágios:
(1) Passagem da função de entrada f(t), no domínio tempo, para a sua representação no
domínio frequência F() por meio de uma transformação de Fourier.
(2) Solução do problema algébrico, usando funções complexas, no domínio frequência.
(3) Volta para o domínio tempo pelo cálculo da Antitranformada da saída, caso se
considerar necessário.
26
Impoortantes sin
nais e suas ttransformaadas
Funçção impulsoo unitário (de Dirac)
A funnção Impulsso Unitário (t ) é umaa das mais importantes
i
funções noo estudo de ssinais e
sistem
mas. Ela foii inicialmentte definida ppor P.A.M.D
Dirac.
nição:
Defin
( t ) ddt 1
( t ) 0
t0
t0
A funnção impulsso só tem seentido de deefinição na área em quue a mesma se concentrra, ou
seja, na origem, t= 0.
Portaanto
0
(t )dt (t )dt 1
0
(24))
onde 0 e 0 sãão valores arrbitrários peequenos quee se aproxim
mam da origgem pela dirreita e
pela esquerda.
e
A funnção impulsso unitário ppode ser connsiderada um
m pulso estrreito de áreaa unitária coom o
1
limitee de larguraa 0 e am
mplitude
conforme figurra a seguir:
A reppresentação gráfica da F
Função Imppulso de Dirac é apresenntada na figuura abaixo.
27
f(t)
(t )
t
0
Propriedade da amostragem da “função” de Dirac
(t ) (t ) dt (0) , onde (0) é uma função continua na
A propriedade da amostragem
origem, é verificada através da multiplicação (t ) por um pulso estreito como mostrado na
figura abaixo, que representa (t ) quando se faz o limite de 0 .
1
(t )
2
2
O produto (t ) (t ) é então aproximado pelo valor (0)
2
,
2
. Resulta daí que:
(0)
(t ) (t )dt dt
2
2
(0)
dt
2
0
2
0
1
que é constante no intervalo
(0)
(0) cqd.
0
Esta propriedade significa que a área sob o produto da função com um impulso (t ) é igual
ao valor da função no instante onde o impulso unitário é localizado.
Nesta derivação assumimos que a função é continua no instante em que o impulso é
localizado.
O resultado acima pode ser generalizado para:
(t ) (t t ) dt (t )
0
(25)
0
28
A transformada de Fourier da função impulsiva unitária na origem é dada por:
(t ) (t )e jt dt e j 0 1
(26)
Cujo gráfico é apresentado na figura abaixo.
F( )
1
0
Representação integral da função de Dirac
De (t ) 1 conclui-se que:
1
1
(t ) (t ) 1
1 e jt d
2
2
1
1
1
(t )
2
e
jt
d
e
jt
1
d ()
2
e
jt
d
(27)
Função degrau unitário
Outra função também muito utilizada no estudo de sinais é a função degrau unitário,
normalmente escrita como u (t ) e definida por:
1
u (t )
0
t0
t 0
Sua representação gráfica é dada por:
29
u (t )
1
t
0
Um sinal g (t ) é causal quando possuí a seguinte propriedade:
g (t ) 0 t 0
Um sinal g(t) em que isto não ocorra pode ser transformado em causal f(t) multiplicando o
sinal original por u(t):
f(t)= g(t).u(t)
Vamos observar um exemplo a seguir:
O sinal e at , figura “a” seguinte, representa uma exponencial que começa em t 0 . Se
quisermos que este sinal comece em t = 0 (forma causal), deve-se descrevê-lo como
e atu(t ) sendo sua representação gráfica a apresentada na figura “b” abaixo.
g(t)
f(t)
e at . u(t )
e at
0
0
t
figura a
figura b
A transformada de Fourier da função degrau unitário na origem é dada por:
u (t ) u(t )e
jt
dt e
0
jt
1
dt e jt
j
30
0
1
j
(28)
Exemplos de Transformada de Fourier (e de Antitransformada de Fourier)
Calculemos transformadas e antitransformadas de Fourier para alguns casos.
1) Função exponencial:
Ela é dada por:
2) Pulso retangular:
Isto pode ser simplificado para:
Desde que X() é uma função real de w, sua fase é zero para todo w. O gráfico de X() é
apresentado na figura seguinte.
Transformada de Fourier de um pulso retangular.
31
3) Função g (t ) cos ot
cos o t
1 j 0 t
e
e j 0 t
2
Relação de Euler
e j0t 2 ( 0 )
e j0t 2 ( 0 )
cos o t
1
2 ( 0 ) 2 ( 0 )
2
cos o t 2
1
( 0 ) ( 0 ) da qual resulta:
2
cos o t ( 0 ) ( 0 )
Espectro da Função
cos 0 t
0
5) Função g (t ) sinot
sen o t
1 j 0 t
e
e j 0 t
2j
Relação de EULER
e j0t 2 ( 0 )
e j0t 2 ( 0 )
sen o t
1
2 ( 0 ) 2 ( 0 )
2j
32
sen o t 2
1
( 0 ) ( 0 ) da qual resulta:
2j
sen o t
j
( ) ( )
0
0
sen 0 t
Espectro da Função
j
0
0
4) 1 ( 0 )
Usando a propriedade de amostragem da função impulso temos:
1
1
( 0 )
( 0 )e jt d e j0t
2
2
1
Portanto;
1 j 0 t
e ( 0 ) ou
2
Temos ainda que:
e j0t 2 ( 0 )
e j0t 2 ( 0 )
33
7) 1 ( )
g ( t ) G ( )
1 ( )
1
2
1
g(t )
2
( )e
jt
G ( ) e
jt
d onde G(ω ) δ (ω )
d
1
2
(t )
( )
1
0
t
1
( )
2
ou
0
1 2 ( )
34
Propriedades da Transformada de Fourier
1) Propriedade da Simetria
Se f (t ) F ( )
então F (t ) 2 f ( )
Demonstração:
1
Tomando - se a equação f (t )
2
F ( )e
temos: 2 f (t )
jt
F ( )e
j t
d
d
Nesta integral, é uma variável simbólica e, portanto pode ser substituída por outra
variável qualquer.
Por exemplo, uma variável x. Assim:
2 f (t )
F ( x )e
jxt
dx
Trocando agora a variável t por resulta:
2 f ( )
F ( x )e
jx
dx
Da mesma forma substituindo a variável simbólica x por outra variável t, teremos:
2 f ( )
F (t )e
jt
dt F (t )
ou
F (t ) 2 f ( )
Isto demonstra claramente a propriedade de simetria quando f(t) é uma função par.
No caso em que f ( ) f ( ) a equação F (t ) 2 f ( ) se reduz a:
F (t ) 2 f ( )
Como foi demonstrado, pode se notar que a transformada de Fourier de uma função pulso
retangular, é a função amostragem e que a transformada de Fourier de uma função
amostragem é um pulso retangular.
35
Assim fica demonstrado que a propriedade de simetria se aplica a todas as funções pares.
2) Propriedade da Linearidade
g11 (t ) G11 ( )
g 2 (t ) G2 ( )
g1 (t ) g 2 (t ) G1 ( ) G2 ( )
então se considerarmos quaisquer constantes arbitrárias a 1 e a 2
a1 g1 (t ) a2 g 2 (t ) a1G1 ( ) a2G2 ( )
a1 g1 (t ) a2 g 2 (t ) ..... an g n (t ) a1G1 ( ) a2G2 ( ) ..... anGn ( )
3) Propriedade da Escala
Uma expansão do domínio do tempo equivale a uma compressão no domínio da
frequência e vice - versa.
Se
g (t ) G ( )
Então para uma constante real a, temos: g (at )
36
1
G
a
a
Demonstração:
Se a > 0 (Real) g (at )
g (at )e
jt
dt
fazendo x at
1
1
( j ) x
g ( x)e a dx G
a
a a
1
portanto
g (at ) G ( )
a
a
1
se a < 0 então g ( at )
G
a a
temos:
g (at )
1
G
a a
g (at )
4) Translação em frequência
Se g (t ) G ( ) então g (t )e j 0 t G ( 0 )
Este teorema estabelece que numa defasagem de 0 no domínio da frequência equivale a
multiplicar a função f(t) por e j 0 t no domínio do tempo.
A multiplicação da função pelo fator e j 0 t translada todo o espectro da frequência em
0 .
Demonstração:
g (t )e j 0 t G ( 0 )
g (t )e
g (t )e j 0 t
j 0 t j 0 t
e
dt
g (t )e
Portanto:
g (t )e j o t G 0
37
j ( 0 ) t
dt G 0
5) Defasagem no tempo
Teorema
Se g (t ) G ( w)
Então g(t t 0 ) G( w). e j t0
Demonstração:
x
g (t t ) . e
g (t t 0 )
j t0
0
dt
x
Substituindo
t t0 x
dt dx
e
obtém-se:
g (t t 0 )
x
x
g (t t
0
).e
j ( x t 0 )
x
dx = g ( x).e
x
onde
x
g ( x).e
jx
dx G( )
x
Portanto: g (t t 0 ) G( ).e j t0
38
jx
.e
jt0
dx e
jt0
x
g ( x).e
x
jx
.dx
Transmissão de sinais através de Sistemas Lineares
Colocando-se na entrada de um sistema uma função f(t) teremos na saída desse mesmo
sistema outra função r(t). Quando o sistema não introduzir em r(t) frequências diferentes
daquelas existentes no conteúdo harmônico de f(t), o sistema em questão será dito linear.
É de nosso interesse conhecer a resposta r(t) de um sistema quando excitado por um sinal
f(t) na entrada. A figura abaixo ilustra em diagrama de bloco a representação generalizada
de um sistema.
Sinal através de sistema
Resolve-se este problema utilizando o domínio da frequência a depois retornando ao
domínio do tempo. As transições entre esses dois domínios serão feitas através da
transformação de Fourier.
A transformada G () é conhecida como função de transferência. Ela a uma característica
do sistema a possibilita fazer a 1igacao no domínio de frequência de F() com R().
A transferência G() depende apenas dos parâmetros do sistema a nos indica que em uma
dada frequência o sinal - de entrada sofrerá alterações em fase e em amplitude, sendo
que:
Transmissão sem distorção
Um sistema ideal é aquele que transmite qualquer sinal sem causar-lhe deformação. Um
sistema é dito sem distorção quando:
onde f(t) é o sinal de entrada, r(t) é o sinal de saída e ta é o atraso imposto pelo sistema.
39
As figuras seguintes ilustram esquematicamente o sinal de entrada e de saída quando um
sistema não apresenta distorção.
Transmissão sem distorção (a) sinal de entrada; (b) sinal de saída.
Deseja-se determinar qual a característica que deve ter a função de transferência para que o
sistema seja considerado sem distorção.
Caso f(t) tenha Transformada de Fourier F() então a transformada de Fourier de
k f(t-ta) será dada por:
r(t) =
(veja o item “time shift”, da Tabela de propriedades da transformada de Fourier – página
41)
Como F() e R() estão relacionadas pela transferência do sistema G(), sendo que:
chega-se a conclusão de que para um sistema no introduzir distorção a sua transferência
deverá ser igual à:
Desta relação concluí-se que para um sistema não introduzir distorção é necessário que a
sua curva de resposta em amplitude seja constante em toda a faixa de frequência e que sua
40
curva de fase seja linear com a frequência. Na prática esta condição é ideal, pois todos os
sistemas apresentam limitação de faixa.
Na figura a seguir apresentam-se as características de amplitude e fase de um sistema para
que não ocorra distorção do sinal processado.
(a)
(b)
(a) curva do ganho em amplitude de um sistema sem distorção;
(b) curva de fase de um sistema sem distorção.
Largura de faixa de um Sistema
A constância da magnitude G ( ) em um sistema é especificada normalmente pela sua
largura de faixa.
A largura de faixa de um sistema é definida arbitrariamente como o intervalo de
frequências no qual a magnitude G ( ) permanece dentro de 1
vezes (dentro de 3 dB )
2
o seu valor na metade da faixa.
A largura de faixa de um sistema, cujo gráfico G ( ) é mostrado na figura abaixo, é
2 1 .
41
Para uma transmissão sem distorção, precisamos, evidentemente, de um sistema com
largura de faixa infinita. Devido às limitações físicas, é impossível construir esse sistema.
Na prática pode-se conseguir uma transmissão sem distorção satisfatória, mediante sistemas
com larguras de faixa finitas, mas suficientemente grandes.
Para qualquer sinal físico, o conteúdo de energia diminue com a frequência.
Por isso, só é necessário a construção de um sistema que transmita as frequências que
contenha a maior parte da energia do sinal.
A atenuação dos componentes de frequência extremamente alta tenderia a causar uma
distorção muito pequena, uma vez que essas componentes carregam muito pouca energia.
Exercícios
1. Encontre a TF de f (t ) e a t . Desenhe seu espectro
2. Encontre a TF de f (t ) e a t t0 . Desenhe seu espectro.
3. Determine a TF da função g ( t ) sen 0 t .
4. Determine a TF do pulso retangular mostrado na figura a seguir e desenhe seu espectro
de frequência.
g (t )
1
T2
T
2
t
5. Encontre a TF para a função representada abaixo:
42
g(t)
e at
t
T
6. Mostre que g (t T ) g (t T ) 2G ( ) cos T
7. Mostre que:
(t ) (t t ) dt (t )
0
0
8. Mostre que e
j 0 t
2 ( 0 )
9. Prove as propriedades das TFs apresentadas na Tabela seguinte:
10. “Relacione” a TF com a Transformada de Laplace.
43
4- CONVOLUÇÃO
Considere conhecida a saída h(t) de um sistema (bloco de processamento – figura abaixo)
quando sua entrada é um impulso unitário de Dirac.
h(t)
(t)
H
Então, para um sistema do tipo linear e invariante no tempo (LIT) e conhecida uma entrada
x(t) genérica é possível a partir de h(t) determinar a saída y(t), isto é:
y(t)
x(t)
Dado
H
então é possível obter y(t) de x(t) e de h(t) se:
y(t-)
x(t-)
Ax(t)+Bx’(t)
Ay(t)+By’(t)
H
H
o sistema for invariante no tempo e ...
linear.
Para tal a função de entrada x(t) será aproximada por uma soma de impulsos como
apresentado na figura abaixo.
x(t) Ak (t-k) ; - < k <
x(k)
x
Ak = x(k)
k
t
Aproximação da entrada por meio de impulsos.
44
Desta figura pode-se escrever:
x(t )
A (t
k
k
k
) com Ak x( k )
Cada componente impulsiva Ak (t k ) na entrada irá gerar uma resposta na saída do
sistema LIT igual à Ak h(t k ) . A saída total será então a soma destas respostas
individuais, ou seja, igual à:
y(t )
A h(t
k
k
k
)
x(
k
k
)h(t k )
Quando se aproxima de zero, pode-se escrever:
y(t ) x( )h(t )d
A expressão acima por definição é a convolução entre a resposta impulsiva e o sinal de
excitação y(t) = x(t) * h(t).
Genericamente a convolução entre duas funções f1 (t ) e f 2 (t ) é igual a uma função f ( t )
obtida pela integral:
f (t ) f1 (t ) * f 2 (t )
f ( ) f
1
2
(t )d
Os seguintes teoremas da convolução são provavelmente os instrumentos mais eficazes na
análise de sinais e de seus harmônicos dos quais se obtém com facilidade muitos resultados
importantes.
Teorema da convolução no tempo
Se
f1 (t ) F1 ( )
f 2 (t ) F2 ( )
Então
f ( ) f
1
2
(t ) d F1 ( ) F2 ( )
ou
f 1 ( t ) * f 2 ( t ) F1 ( ) F2 ( )
45
Demonstração:
f 1 ( ) f 2 (t ) d dt
e
f (t ) e
f 1 (t ) * f 2 (t )
j t
f 1 (t ) * f 2 (t )
j t
1
f 2 ( t ) dt d
F2 ( ) e j t
Pela propriedade da defasagem no tempo
f (t t 0 ) F ( ) e j t0
Portanto
f 1 (t ) * f 2 (t )
f 1 ( ) e j F2 ( ) d F1 ( ) F2 ( )
cqd.
F1 (
)
Teorema da convolução em frequência
Se
Então
f1 (t ) F1 ( )
)
f 2 (t ) F2 (
f 1 (t ) f 2 (t )
1
2
F (u) F ( u ) du
1
2
ou
f 1 (t ) f 2 (t )
1
F ( ) * F2 ( )
2 1
cqd.
Observe que usando o teorema da convolução no tempo o sinal de saída pode ser calculado
do seguinte modo:
f s (t ) g (t ) * f e (t ) 1 G( ) Fe ( )
46
Algumas relações da convolução
1. Lei Comutativa
f 1 (t ) * f 2 (t ) f 2 (t ) * f 1 (t )
2. Lei Distributiva
f 1 (t ) * f 2 (t ) f 3 (t ) f 1 (t ) * f 2 (t ) f 1 (t ) * f 3 ( t )
3. Lei Associativa
f 1 (t ) * f 2 (t ) * f 3 (t ) f 1 (t ) * f 2 (t ) * f 3 (t )
F1 ( ) F2 ( ) F3 ( ) F1 ( ) F2 ( ) F3 ( )
Processo de Convolução Gráfica
O processo matemático para cálculo da convolução, muitas vezes apresenta dificuldades e
gera complicadores que exigem do aluno um conhecimento bastante profundo e detalhado
de ferramentas específicas de cálculo.
Há vários casos em que dois sinais r(t) e s(t) são representados por funções matemáticas
complexas, ou ainda representados por formas de onda não muito conhecidas e que
portanto dificultam a escrita da função matemática que os define.
Como simplificação para o cálculo da convolução destes sinais, podemos utilizar um
método onde não há necessidade de detalhar estas funções através do processo matemático
de integração.
Este método é relativamente simples e pode ser utilizado para muitas aplicações em
sistemas de comunicação. O método consiste na observação do comportamento de r(t) e s(t)
através da convolução gráfica destas funções.
Exemplo:
Calcule a convolução gráfica de r(t) com s(t), quando r(t) e s(t) são pulsos como mostrado
abaixo:
r(t)
s(t)
1
1
t
-1
t
1
-2
2
Solução
procedimento para o calculo da convolução entre r(t) e s(t) é mostrado a seguir:
47
48
Exercício:
Use a técnica da convolução gráfica para calcular a convolução das funções mostradas
abaixo:
49
O resultado desta convolução é apresentado a seguir:
Exercícios
1. Encontre v*v*v(t) (convolução tripla) de v(t), onde v(t) é um pulso retangular de
largura e amplitude iguais a 1. Utilize convolução gráfica para obter a solução.
2. Determine as seguintes integrais da convolução:
(a) u (t ) * u (t ) ; (b) u (t ) * et .u (t ) ; (c) u (t ) * t u (t )
Verifique os resultados aplicando as Transformadas de Fourier
3. (a) Obter a corrente i(t) no circuito apresentado na figura seguinte sendo sua entrada,
v(t), um impulso unitário no instante t= 0s.
(b) Idem para v(t) = cos t.
(c) Idem para v(t) igual a um impulso unitário no instante t= 1 s.
4. Use ( t )
1
2
f (t ) F ( )
j ( t )
d em f ( ) ( t ) f (t ) dt para definir a transformação
e
f (t )e jt dt e sua inversa f (t ) 1 F ( )
1
2
F ( )e
jt
d .
5. Considere a seguinte definição: um trem de impulsos unitários (neste caso de período
T=1) é um sinal periódico formado por deltas de Dirac com a seguinte expressão:
x(t ) (t k ) .
(a) Obtenha a convolução z(t) = x(t) * y(t) sendo x(t) um trem de impulsos
unitários (com T=1) e y(t) um sinal que seja nulo nos intervalos t < 0 e t > 1.
(b) Encontre a TF de um sinal de um trem de impulsos unitários (com T=1). Resposta:
X ( ) (t k ) 2 ( k 2 )
(c) Encontre a TF do sinal obtido em (a).
(d) A partir do resultado em (c) obtenha a TF de um sinal periódico de período T
qualquer.
50
5- SISTEMAS E CLASSIFICAÇÃO
Representação de um Sistema
Um sistema é um modelo matemático de um processo físico que relaciona um sinal de
entrada ( excitação ) com um sinal de saída ( resposta ).
Tomemos x e y como sendo os sinais de entrada e saída , respectivamente, de um sistema.
Esse sistema pode ser interpretado como sendo a transformação ( ou mapeamento ) de x
para y. Esta transformação é representada matematicamente pela seguinte notação:
y Hx
onde H é o operador que representa uma regra bem definida para a qual x é transformado
em y.
A relação acima é representada como mostra a figura (a) abaixo. Múltiplas entradas e/ou
saídas também são possíveis como visto na figura (b).
x
Sistema y
x1
Sistema
xn
H
(a)
y1
yn
(b)
Sistema com simples ou múltiplas entradas e saídas
Sistemas contínuos ou discretos no tempo
Se o sinal de entrada e saída x e y são sinais contínuos no tempo, então o sistema é
chamado de sistema continuo no tempo. Se o sinal de entrada e saída x e y são sinais
discretos no tempo ou seqüências discretas no tempo então o sistema denomina-se de
sistema discreto no tempo.
x
Sistema y
x n
Sistema H
(a) Sistema continuo no tempo
(b) Sistema discreto no tempo
51
y n
Sistema com memória e sem memória
Um sistema pode ser chamado de sem memória se sua saída em qualquer tempo depende
tão somente do mesmo tempo da entrada. Caso contrário o sistema é chamado com
memória.
Um exemplo de um sistema sem memória é um resistor R com entrada x(t) sendo uma
corrente e que tem como saída y(t) uma tensão. A relação entrada-saída (Lei de Ohm) para
um resistor é:
y (t ) Rx (t )
Um exemplo de sistema com memória é um capacitor C com a corrente sendo a entrada x(t)
e a Tensão como a saída y(t), assim:
t
y (t )
1
x( )d
C
Um segundo exemplo de um sistema com memória é um sistema discreto no tempo para o
qual a entrada e saída são relacionadas por:
y n
n
x k
k
Sistemas Causal e Não-Causal
Um sistema é chamado de causal se sua saída y(t) com um tempo arbitrário t t0 depende
tão somente da entrada x(t) para t t0 . Isto é, a saída de um sistema causal no tempo
presente depende somente do presente e/ou dos valores passados da entrada, e não dos
valores futuros. Assim, em um sistema causal, não é possível se obter uma resposta na saída
antes de se aplicar uma entrada para o sistema.
Um sistema é chamado de não-causal se ele é não satisfaz as condições acima, e pode ser
exemplificado como segue:
y (t ) x (t 1)
y n x n
Observe que todos os sistemas sem memória são causal, mas não vice versa.
52
Sistema Linear e Não Linear
Se o operador H na equação y Hx satisfaz as duas condições que se seguem, então H é
chamado de um operador linear e o sistema é representado por um operador linear T
chamado de um sistema linear.
Condições:
1. Adição:
Dado que Hx1 y1 e Hx2 y2 ,
então: H x1 x2 y1 y2 para qualquer sinal x1 e x2
2. Escala: H x y para qualquer sinal x e qualquer escalar
Qualquer sistema que não satisfaça as condições acima é classificado como um sistema
não linear.
As equações acima podem ainda serem combinadas entre si resultando em:
H 1 x1 2 x2 1 y1 2 y2
este novo resultado (equação ) é também conhecido como superposição.
Exemplos:
Sistemas lineares resistor da equação y = Rx
Sistemas Não Lineares y x2 e y cos x
Uma interessante e intuitiva conseqüência da propriedade da escala é que em um sistema
linear, para uma entrada de sinal x(t) = 0 a saída é também igual à zero.
Sistema Invariante no tempo e Variante no tempo
Um sistema é chamado de invariante no tempo se o sinal de entrada causa o mesmo
deslocamento ( atraso ou avanço ) no sinal de saída. Assim , para um sistema continuo no
tempo, o sistema é invariante no tempo se:
H x(t t0 ) y (t t0 )
Para um sistema discreto no tempo temos:
53
H x n k y n k
onde k é qualquer número inteiro.
Quando o sistema não satisfaz a equação H x(t t0 ) y (t t0 ) , o sistema é dito variante
com o tempo.
Se o sistema é linear e também invariante no tempo, então ele é denominado de Sistema
Linear Invariante com o Tempo abreviado por ( LTI ).
Sistemas Estáveis
Um sistema é do tipo entrada limitada/saída limitada (BIBO – bounded input / bounded
output) estável se e somente se toda a entrada limitada resultar em uma saída limitada.
A saída desse sistema não diverge da entrada se a entrada não divergir.
Para colocar a condição de estabilidade BIBO em uma base formal, considere um sistema
de tempo contínuo cuja relação de entrada e saída está de acordo com a descrição da
equação abaixo. O operador H é BIBO estável se o sinal de saída y(t) e de entrada x(t)
satisfizerem esta condição.
y (t ) kn e x(t ) kn
(saída)
(entrada)
onde kn é um número real, positivo e finito.
Sistema com Realimentação
Uma classe especial de sistemas com grande importância no estudo e aplicação de
sistemas consiste na de sistemas com realimentação (feedback). Em um sistema com
realimentação, o sinal de saída é realimentado e adicionado à entrada do sistema como
mostrado abaixo:
x(t )
y(t)
Σ
Sistema Sistema com Realimentação
54
Exemplo
Considere o capacitor mostrado na figura abaixo.
Faça a entrada x(t) = i(t) e a saída y(t) = vc (t )
Para estas considerações determine a relação entrada /saída do sistema
Determine ainda se o sistema é:
a) Sem-memória
b) Causal
c) Linear
d) Invariante no tempo
e) Estável
Solução
Assumindo que a capacitância C é constante, a tensão de saída vc (t ) sobre o capacitor e a
corrente de entrada x(t) pode ser relacionada por:
y (t ) H x(t )
t
1
x( )d
C
a) Observando a equação acima é fácil de ver que a saída y(t) depende dos valores de
entrada iniciais e presente do sistema. Assim o sistema é com memória.
b) Desde que a resposta do sistema não depende de valores futuros da entrada, o sistema é
causal.
c) A condição de linearidade é x(t ) 1 x1 2 x2 y(t ) 1 y1 2 y2 então
t
1
y (t ) H x(t ) 1 x1 ( ) 2 x2 ( ) d
c
55
1 t
1 t
1 x1 ( )d 2 x2 ( )d
C
C
1 y1 (t ) 2 y2 (t )
Portanto como a propriedade da superposição é satisfeita pode-se afirmar que o sistema é
linear
d) Fazendo y1 (t ) ser a saída produzida por uma corrente na entrada deslocada representada
por x1 (t ) x(t t0 ) teremos:
y (t ) H x(t t0 )
1
c
t t0
t
1
x( t0 )d
c
x( )d y (t t0 )
Neste caso o sistema é invariante no tempo
e)
x(t ) k1u(t )
com k1 0
t
k
k
1
y (t ) k1u ( )d 1 tu (t ) 1 r (t )
c
C
C
onde r (t ) tu (t ) que é a função rampa unitária mostrada na figura abaixo.
r (t ) tu (t )
0
t
Analisando as condições matemáticas e gráficas apresentadas, desde que y(t) cresce
linearmente no tempo sem limite, o sistema é não estável (não BIBO).
56
Conexões em Cascata, Paralelo e com Realimentação
Modelo básico
x(t)
X ( )
h(t )
r(t)
R ( )
H ( )
Normalmente um sistema possui muitas unidades ou subsistemas interligados.
Quando os subsistemas em questão são descritos por função de transferência individual, é
possível e desejável juntá-las e considerar uma função de transferência do sistema global.
As relações correspondentes para dois subsistemas ligados em paralelo, cascata e com
realimentação são fornecidos abaixo.
As configurações mais complexas podem ser analisadas pela aplicação sucessiva dessas
regras básicas. Uma consideração essencial deve entretanto ser feita; quaisquer interações
ou efeitos de cargas devem ser consideradas nas funções de transferência individuais de
modo que representem a resposta real dos subsistemas no contexto do sistema global.
A figura abaixo fornece o diagrama de dois subsistemas em paralelo; as duas unidades tem
a mesma entrada e suas saídas são somadas para fornecer a saída do sistema.
Da superposição segue-se que:
Y( ) X( ).H1 ( ) X( ).H 2 ( ) ou Y( ) [ H1 ( ) H 2 ( )]. X( ) , de modo que a
função de transferência global é:
H( ) H1 ( ) H 2 ( )
Sistema em Paralelo
H1 ( )
x(t)
X( ).H1 ( )
Y( ) X( ).H1 ( ) X( ).H 2 ( )
+
X ( )
H 2 ( )
X( ).H 2 ( )
57
Na ligação em cascata, conforme figura a seguir tem-se:
Cascata
H1 ( )
X ( )
H 2 ( )
Y ( )
Y( ) X( ).H1 ( ).H 2 ( )
E, portanto a função de transferência é: H( ) .H1 ( ).H 2 ( )
A ligação em realimentação difere das outras duas, considerando-se que a saída é dirigida
para trás através de H 2 ( ) e subtraída da entrada. Portanto:
Y( ) H1 ( )X( ) Y( ).H 2 ( )
Assim: Y( )
H 1 ( )
X( )
1 H1 ( ).H 2 ( )
Este caso é mais apropriadamente chamado de realimentação negativa, distintamente da
realimentação positiva, onde o sinal realimentado é somado com a entrada em vez de ser
subtraído.
Com Realimentação
X( ) +
- +
H1 ( )
X( ).H1 ( )
Y( )
H 2 ( ) H 2 ( ).Y( )
X ( )
Y( )
58
H 1 ( )
X( )
1 H1 ( ).H 2 ( )
Sistemas vistos como Interconexões de Operações
Em termos matemáticos, um sistema pode ser isto como uma interconexão de operações
que transforma um sinal de entrada num sinal de saída com propriedades diferentes das do
sinal de entrada. Os sinais podem ser da variedade do tempo contínuo ou discreto, ou uma
combinação de ambos.
Digamos que o operador H (função de transferência) global denote a ação de um sistema.
Então, a aplicação de um sinal de tempo contínuo x(t) à entrada do sistema produz o sinal
de saída descrito por:
y( t ) Hx ( t )
A figura (1) abaixo mostra uma representação em diagrama de blocos da equação acima.
x(t)
H
y(t)
De maneira correspondente, para o caso de tempo discreto podemos escrever a equação da
seguinte forma:
y(n ) Hx (n )
em que os sinais de tempo discreto xn e yn denotam os sinais de entrada e saída,
respectivamente como descreve a figura (2 )
x[n]
H
y[n]
Sistema Invariante no Tempo
Diz-se que um sistema é invariante no tempo se um retardo de tempo ou avanço de tempo
do sinal de entrada levar a deslocamento de tempo idêntico no sinal de saída. Isto significa
que um sistema invariante no tempo reage de maneira idêntica, não importa quando o sinal
de entrada seja aplicado.
Em outras palavras, as características de um sistema invariante no tempo não se modificam
com o tempo. Caso contrário, diz-se que o sistema é variante no tempo.
59
Exercícios
1) Considere o indutor apresentado na figura abaixo. Faça a entrada x(t) = v(t) e a saída y(t)
= i(t).
Para estas considerações determine a relação entrada /saída do sistema.
Determine ainda se o sistema é:
a) Sem-memória
b) Causal
c) Linear
d) Invariante no tempo
e) Estável
2) (a) Dos sistemas estudados neste capítulo quais se pode aplicar o teorema da convolução
no tempo ou seja para os quais o sinal de saída pode ser calculado pela seguinte expressão:
y(t ) x(t ) * h(t ) 1 H ( ) X ( ) . Por que?
(b) Identifique cada elemento da expressão acima apresentada.
3) Demonstre que y(t) = x(t) * h(t), sendo h(t) = H{(t)}, x(t) entrada de um sistema H do
tipo LTI e y(t) a sua saída, através da seguinte sequência:
(a) Escreva x(t) usando a integral (de - a ) em d da função impulsiva (t-) vezes
x().
(b) Aplique H{x(t)} na expressão obtida em (a).
(c) Finalmente use H{ x(t) dt} = H{x(t)}dt em (b). Note que H atua apenas em
funções que contenham explicitamente a variável t.
Obs.: por linearidade H{ xk(t) t}= H{ xk(t)} t H{
60
x(t) dt}=
H{x(t)}dt.
6- ESPECTRO DE DENSIDADE DE ENERGIA
Um parâmetro útil de um sinal f(t) é a sua energia normalizada.
Define-se a energia normalizada (E) de um sinal f(t), como a energia dissipada por um
resistor de 1 quando se aplica ao mesmo uma tensão ou corrente f(t).
Assim,
E
f
2
(t )dt
Este conceito de energia só tem sentido se a integral acima é finita. Os sinais de energia
finita são chamados de sinais de energia.
Para alguns sinais, como os sinais periódicos a integral acima é infinita e o conceito de
energia definido não tem sentido.
Nesses casos considera-se a média no tempo da energia que na verdade é a média da
potência do sinal. A esses sinais daremos o nome de Sinais de Potência.
Se F ( ) é a transformada de f ( t )
1
f (t )
2
F ( ) e d
j t
A energia de f ( t ) será:
E
1
(
)
f
t
2 F ( )e jt d dt
f (t )
f 2 (t )dt
Mudando a ordem de integração do segundo membro teremos:
1
E f (t )dt
2
2
1
(
)
F
2
jt
(
)
f
t
e
dt
d
A integral nos parênteses é F ( ) , portanto:
61
1
1
E f (t ) dt
F ( ). F ( ) d
2
2
2
1
E
2
F ( )
F ( )
2
d
2
d
Demonstração:
Amplitude
F ( ) F ( ) e j
Fase
F ( ) e par
Se f ( t ) é uma função real então F ( )
( ) fase e impar
F ( ) F ( ) F ( ) f (t ) e jt dt
*
e portanto F( )
f (t ) e dt
j t
Devido a Simetria Hermitiana temos:
F ( ) F ( ) e j
F ( ) F ( ) e
j ( )
Resultando
F ( ). F ( ) F ( )
2
62
Interpretação da densidade de energia
1
E
2
F ( )
2
d
Exemplo
Consideremos um sinal f ( t ) aplicado a um filtro passa-banda como mostrado a seguir:
H( )
1
Este filtro corta todas as frequências, com exceção das que estão compreendidas dentro de
cuja frequência central é 0 .
Se R( ) é a TFde r(t) desse filtro, então:
R ( ) H ( ). F ( )
e a energia E 0 de saída do sinal r(t) será:
1
E0
2
2
F ( )H ( )
d
Como H( ) é zero em qualquer ponto exceto em uma banda onde ela vale 1, teremos
para 0 :
1
2
E 0 2.
F ( 0 ) .
2 f f
2
2
A energia de saída será então:
2
E 0 2 F ( 0 ) . f
63
Portanto só se transmitem (sem alteração) as componentes de f(t) que se encontram na
banda definida por . As demais componentes são todas suprimidas.
2
A energia E 0 2 F ( 0 ) . f representa a energia de f ( t ) mais precisamente a energia
das componentes de f ( t ) que estão em com centro em 0 .
Exemplo:
a) Pulso
b) Densidade espectral
c) Espectro de energia
Sinais periódicos de potência
A média num intervalo de duração T0 de uma função arbitrária v (t ) vale:
64
T0
1
v(t ) lim
T T
0
2
v(t )dt
T0
2
Considere o sinal v (t ) periódico, de período T0. Então esta média não varia alterando-se o
instante inicial da integral:
v (t )
1
T0
t1 T0
v(t )dt
=
t1
1
v (t ) dt
T0 T0
A potência média é a média no tempo da potência instantânea.
Se v(t) é um sinal de tensão, v 2 (t ) será proporcional a sua potência instantânea.
P v 2 (t )
1
To
v (t )
2
dt
T0
Exemplo:
Dado v ( t ) A cos( 0 t )
0
2
T
T
2
0
2
T
1
P v ( t ) A cos( 0 t ) dt
T0 0
2
A2
P
T0
2
T0
cos(
0
t ) dt
0
T
A2 0 2
cos ( 0t ) dt
T0 0
cos 2 A 2 cos2 A 1
65
0
T
P
A2 0 1 cos(20 t 2 )
dt
T0 0
2
T
A2
T0
T0
T
dt 0
0 2 0 cos(2 0t 2 ) dt
A2 t 0
A2
A2
0
T
2T0 0
2
T0 2 0
A2
P
2
Teorema de Parseval
Relaciona a potência média de um sinal periódico e os coeficientes de sua série de
Fourier.
2
* j 2 f 0t
1
1
1
*
v ( t ) V K e
P v (t ) dt v (t )v (t )dt
dt
T0 T0
T0 T0
T0 T0
1
j 2 f 0t
*
(
)
.
v
t
e
dt
V
VK .VK *
K
T
0 T0
P
2
1
v (t ) dt
T0 T0
V
VK
2
K
66
2
Exercícios
1) Suponha que todas as componentes de frequência em f > 1
espectro do trem de pulsos retangulares de largura .
são removidas do
Use o teorema de Parserval para calcular a porcentagem de potência que resta quando
f 0 1 2 (onda quadrada ).
2) Repita o problema anterior para f 0 15
67
7- TRANSFORMADA DISCRETA DE FOURIER (TDF)
Com a revolução da Microeletrônica e a disseminação dos computadores, todas as áreas de
aplicação da Engenharia Elétrica foram invadidas por equipamentos baseados em
processadores digitais. Deste modo se evidenciou a criação de uma técnica com
características próprias relacionada ao emprego específico de computadores que são
incorporados de um modo quase “invisível” a produtos para os mais variados usos - a
denominada Eletrônica Embutida (EE).
Como exemplos de produtos caracterizados pela utilização da técnica de EE em sua
concepção pode-se citar: em Telecomunicações - celulares, pagers, roteadores, modens; em
Instrumentação – osciloscópio digital, instrumentos virtuais; em Medicina - medidores de
pressão arterial, monitores de glicemia; aparelhos de ecocardiograma; em Controle
Industrial - sensores inteligentes, controle de fornos e de maquinas; em Processamento de
Dados e Escritório - calculadoras, fax, copiadoras, scanners, impressoras; em Consumo e
Eletrodomésticos - forno de microondas, maquinas de lavar, secretária eletrônica, TV
digital, videogames; na Industria automobilística - controle de transmissão, injeção
eletrônica, freio ABS, suspensão ativa.
Nestes produtos é comum representar-se sistemas ou subsistemas por conjuntos de blocos
de processamento de sinais (que realizam operações como, por exemplo, filtragem,
integração, diferenciação, soma, subtração, produto, retardo e outros) os quais atualmente
em geral são implementados pela programação de processadores digitais. Nos primórdios
da Eletrônica, blocos semelhantes a estes eram realizados exclusivamente por circuitos
analógicos.
Esta tendência na digitalização de produtos deu origem a teorias que estenderam as
ferramentas matemáticas usadas na analise de sinais contínuos para englobar o caso de
sinais discretos. Veremos a seguir um exemplo importante de como isto ocorreu no campo
das Telecomunicações.
Um processamento muito difundido em Telecomunicações é o da obtenção da composição
harmônica senoidal de um sinal também denominada de espectro em frequência deste sinal.
A Transformada de Fourier é uma ferramenta matemática utilizada na analise espectral de
sinais. Entretanto, sua definição original é estabelecida para sinais contínuos e de tempo
contínuo t R o que leva a espectros de frequência contínua f R .
A representação contínua em absoluto é o modo mais natural de se tratar um sinal em
computadores: as amostras de um sinal correspondem a valores lidos em intervalos
discretos no tempo t Z . Além disto observa-se que é finito o tamanho de uma amostra o
qual é limitado pelo próprio espaço de memória disponível no processador digital.
A seguir será feita uma introdução à passagem da Transformada de Fourier de tempo
continuo para a Transformada Discreta de Fourier visando sua aplicação em processadores
digitais ou mais amplamente na EE.
68
Na Figura 1 apresentam-se um sinal f(t) e sua correspondente Transformada de Fourier
F(). Já foram estudadas as expressões para o cálculo de uma destas funções conhecida a
outra:
F ( ) f (t )e jt dt
(7.1)
e
f (t )
1
2
F ( )e jt d
(7.2)
Ta = t f(t) t
F() TA
A = = 2/TA a= 2/Ta Figura 1 – Par f(t) F()
Para processamento digital deste sinal serão consideradas amostras de ambas as
representações. Os instantes de amostragem são apresentados pelas linhas pontilhadas da
Figura 1 e na qual também estão definidos os seguintes valores:
(i) Ta – intervalo de tempo entre duas amostragens sucessivas de f(t)
(ii) TA – duração da Amostragem de f(t)
(iii) A – intervalo de frequência angular entre duas amostras sucessivas de F()
(iv) a – duração da amostragem de F()
69
A Transformada F() de Fourier do sinal f(t) da Figura 1 é dada por:
F ( )
TA
f (t )e jt dt f (t )e jt dt
0
(7.4)
Aproxima-se F() substituindo a integral em (7.4) pela seguinte somatória:
N 1
F ( ) f ( nT a ) e j ( nTa ) Ta
(7.5)
n 0
onde
N
TA
Ta
(7.6)
é o número de elementos na amostra f(nTa): na expressão (7.5), f(nTa) é obtido do sinal f(t)
para os instantes de tempo discretos iguais a t = nTa e portanto corresponde a uma amostra
deste sinal.
A amostragem do sinal F() é obtida da expressão (7.5) sendo dada por:
Fm : F ( m A ) F ( ) m
A
N 1
f
n 0
n
e j ( m A )( nTa )
(7.7)
onde
f n : Ta f (nTa ) Ta f (t ) t nTa
(7.8)
Portanto, o número de elementos na amostra Fm resulta em:
N'
a 2 / Ta T A
0 m N '1
A 2 / T A Ta
(7.9)
As relações a 2 / Ta e A 2 / TA , previamente assumidas na Figura l, levam à
igualdade no número de elementos das amostras Fm e fn, isto é, N’ = N, como pode ser
verificado pelas expressões (7.6) e (7.9).
Assim os intervalos Ta e TA podem ser usados para definir as resoluções desejadas para
cada amostra: Ta define a resolução da amostra fn de f(t) e A (ou TA 2 / A ) a resolução
da amostra Fm de F(). Contudo a relação N=TA/Ta determina o número de elementos para
estas duas amostras.
70
Definição da TDF
Uma vez que Ta e TA são preestabelecidos então se pode dizer que o produto
ATa 2Ta / TA 2 / N , na expressão (7.7), é fixo ao longo dos demais cálculos. Nestas
condições, define-se a frequência angular fundamental (relativa ao período N) como sendo
igual a:
2 / N ATa
(7.10)
Substituindo-se (7.10) em (7.7), obtém-se:
Fm
N 1
f
n 0
n
e jmn
(7.11)
A função Fm na expressão (7.11) é então denominada Transformada Discreta de Fourier
(DFT) da função fn.
Em resumo as grandezas / expressões envolvidas na DFT são as seguintes:
f n Ta f (nTa ) ;
Fm F (m A ) ;
A 2 / TA ; a 2 / Ta ;
N TA / Ta ; 2 / N
TDF inversa (TDFI)
A comparação da Transformada Continua de Fourier F ( )
f (t )e jt dt e de sua
inversa f (t ) (1 / 2 ) F ( )e jt d com a expressão (7.11) induz a seguinte tentativa
para a transformação inversa de (7.11) (de Fm para fn):
N 1
f n C Fm e jnm
(7.12)
m 0
sendo C uma constante a determinar.
A função fn na expressão (12) é então denominada Transformada Discreta Inversa de
Fourier (IDFT) da função Fm.
Pode-se verificar se a IDFT proposta é consistente substituindo-se (7.12) em (7.11):
N 1
N 1 N 1
N 1
Fm C Fk e jnk e jmn C Fk e jnk e jmn
n 0 k 0
n 0 k 0
71
(7.13)
Trocando-se a ordem das somatórias e colocando-se Fk em evidencia resulta:
N 1 N 1
N 1
N 1
k 0 n 0
k 0
n 0
Fm C Fk e j ( k n ) n C Fk e j ( k n ) n
(7.14)
A segunda somatória corresponde a uma PG de razão r dada por:
N 1
N 1
k 0
n 0
r e j ( k m ) Fm C Fk r n
(7.15)
Existem duas condições para realizar o cálculo da somatória desta PG:
N 1
(i) k m r 1 r n N
n 0
N 1
(ii) k m r 1 r n
n 0
r N 1 e j ( k m ) N 1 (10 ) e j ( k m ) 2 1
0
r 1
r 1
r 1
Isto é, se k = m a somatória vale N e se k m ela vale 0. Usando o símbolo de Kronecker
km , definido como sendo 1 se k = m e 0 se k m, é possível condensar os dois resultados
anteriores numa única expressão:
N
r
n 0
n
N km
(7.16)
Finalmente de (7.15) e (7.16) obtém-se:
N 1
Fm C Fk N km CFm N C
k 0
1
N
(7.17)
De (7.17) conclui-se que se aplicando a antitransformada discreta de Fourier numa função
Fm e a seguir aplicando-se a transformada discreta de Fourier no resultado obtém-se
novamente a função original Fm como deveria ser.
Periodicidade das TDF’s
As expressões que definem estas transformações, Fm
N 1
f
n 0
n
e jmn f n
são periódicas de período N. Prova:
m m N e jmn e j ( m N ) n e jmn Nn 10 e jmn e j 2n e jmn
e
n n N e jmn e jm ( n N ) e jmn mN 10 e jmn e jm 2 e jmn
72
1
N
N 1
F
m 0
m
e jnm ,
Portanto, os períodos de repetição de Fm e de fn serão respectivamente iguais à:
TFm N A
T A 2 2
T
a e T fn NTa A Ta T A
Ta T A
Ta
Ta
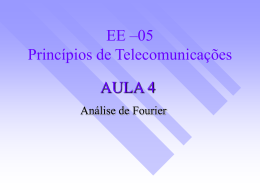
Este resultado é apresentado na Figura 2.
fn
t
‐TA
TA
2TA
Fm
a ‐a Valores de F() apresentados por um Analisador de Espectro Região onde ocorre uma mistura significativa de valores entre períodos sucessivos de Fm Figura 2 – Funções amostradas de f(t) e de F().
Um efeito “não desejado” ocorre na função Fm devido a esta periodicidade. Pode-se mostrar
que para um sinal f(t) limitado em t a sua TF não é limitada em e que, portanto os valores
dos diversos períodos de Fm apresentados na Figura 2 irão se misturar (principalmente em
torno de a/2).
No entanto, como F() tende assintóticamente para zero com , é possível escolher Ta
de modo a aumentar o período de Fm (Figura 2) e minimizar a interferência entre os
períodos sucessivos desta transformada.
Comentário Final
Embora esta introdução histórica faça uma ponte do caso continuo para o caso discreto da
transformada de Fourier atualmente a DFT é definida e tratada de modo independente na
analise de sinais discretos e sob este ponto de vista o problema discutido anteriormente
deixa de existir (ele só tem sentido quando se considera a DFT como aproximação da TF).
73
Private Sub spec_Click()
' Algoritmo para calculo da DFT por MAG em 02/2010
Dim i, k, n, f As Integer
Dim x As Variant
Dim a(1200), h(1200) As Double
Dim real_, imag_ As Double
i=0
For Each x In Sheets(3).Range("B2:B1025")
a(i) = x.Value
i=i+1
Next
'converte dominio frequencia - algoritmo direto: dft (nao fft)
' janela triangular
For i = 1 To 1023
w = (i - 512) / 512
If w < 0 Then w = -w
' w=0
janela retangular
a(i) = 2 * a(i) * (1 - w)
Next
f = Sheets(3).Range("N1").Value / 4
For k = 0 To 512
‘ DFT
real_ = 0
imag_ = 0
For n = 0 To 1024
x = 2 * 3.1415926535 * k * n / 1024
real_ = real_ + a(n) * Cos(x)
imag_ = imag_ - a(n) * Sin(x)
h(k) = ((real_ * real_ + imag_ * imag_) ^ 0.5) / f
Next
Next
h(0) = h(0) / 2
i=0
For Each x In Sheets(3).Range("M2:M1025")
x.Value = h(i)
i=i+1
Next
End Sub
74
75
76
77
9. BIBLIOGRAFIA
1. Modern Digital and Analog Communications Systems – B.P.Lathi – Oxford
Press, 3ª Edition - 2003
2. Introdução aos sistemas de Comunicação – Simon Haykin,Michael MoherBookman, 2ª Edição – 2008
3. Sinais e Sistemas - Simon Haykin, Bookman -2005
4. Linear Systems and Signals B.P.Lahti – Oxford Press, 2ª Edition 2005
5. Sinais e sistemas lineares – B.P.Lathi, Bookman, 2006
6. Signal and Systems, Husey. P. Su, Schaum collection, 2003
7. Principios de Comunicação I- Oswaldo Egydio Gonçalves Junior, Apostila
Unip, 2008.
8. Elementos de Análise de Sistemas Lineares- Boffi L.V. & Coutinho J.A.M.,
ETEGIL.
78
Baixar