Monografia de Especialização:
Aproximações numéricas para funções e raı́zes
de funções.
Cristiane Santos Barreto e Thiago Leonardo Bastos da Silva
Orientador: Flaulles Boone Bergamaschi
Universidade Estadual do Sudoeste da Bahia
Departamento de Ciências Exatas
Curso de Matemática
Aproximações numéricas para funções
e raı́zes de funções
Cristiane Santos Barreto e Thiago Leonardo Bastos da Silva
Orientador: Flaulles Boone Bergamaschi
Vitória da Conquista, 26 de Maio de 2008
Agradecimentos
Às nossas famı́lias pelo apoio durante o tempo de realização deste trabalho.
Ao nosso professor e orientador Flaulles Boone Bergamaschi e aos demais professores e colegas que colaboraram com as diversas discussões sobre
matemática, contribuindo para o aprofundamento de nossos conhecimentos
nessa área e no desenvolvimento deste trabalho.
Índice
1 Raı́zes Reais e Raı́zes Complexas
1.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Método de Newton-Raphson para Raı́zes Reais Múltiplas . . .
1.3 Método de Newton-Raphson para Raı́zes Complexas . . . . . .
2 Aproximação Linear
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . .
2.2 Sistemas de Equações não-Lineares . . . . . . . . .
2.2.1 Método das aproximações sucessivas (MAS)
2.3 Aproximação de função a uma variável real . . . . .
2.3.1 Aproximação pelos Mı́nimos Quadrados . . .
2.3.2 Sistemas Ortogonais . . . . . . . . . . . . .
2.3.3 Solução do Problema de Aproximações . . .
2.3.4 Redução ao Ajuste Linear . . . . . . . . . .
Bibliografia
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
4
7
7
7
8
10
11
12
13
18
21
i
Capı́tulo 1
Raı́zes Reais e Raı́zes
Complexas
1.1
Introdução
Neste capı́tulo vamos desenvolver o método de Newton-Raphson para
achar solução de equações cujas raı́zes podem ser reais (simples e múltiplas)
ou complexas. Os métodos numéricos para o cálculo de raı́zes simples podem
ser encontrados em [1], [2], [6] ou [7].
1.2
Método de Newton-Raphson para Raı́zes
Reais Múltiplas
Definição 1.1. Uma raiz α de f(x)= 0 é dita múltipla de multiplicidade q se
0 6= | g(α) | < ∞, g(x) = (x − α)−q f (x).
Pela definição acima, se α é de multiplicidade q, então f (α) = f 0 (α) =
f 00 (α) = ... = f q−1 (α) = 0 e f q (α) 6= 0. Se a raı́z é simples, ou seja, q=1,
então f 0 (α) 6= 0.
Para o cálculo de raı́zes simples temos alguns métodos numéricos como:
Método do Meio Intervalo (MMI), Método das Aproximações Sucessivas
(MAS), Método de Newton-Raphson (MNR), Método da Secante (MSC)
entre outros.
Pelo método de Newton-Raphson (MNR) temos a equação de iteração
Xn+1 = Xn −
1
f (Xn )
,
f 0 (Xn )
CAPÍTULO 1. RAÍZES REAIS E RAÍZES COMPLEXAS
2
que converge quadradicamente para raı́zes simples. Mas no caso de raı́zes
múltiplas essa convergência não é mais válida.
Para resgatar a convergência quadrática para a raiz α de multiplicidade
q deve-se fazer a seguinte modificação no MNR
Xn+1 = Xn − q
f (Xn )
.
f 0 (Xn )
(A)
No exemplo 1.1, teremos um quadro em que os resultados na segunda
coluna são obtidos pela fórmula acima (A).
Quando não se conhece a multiplicidade da raiz tem-se que desenvolver
f em série de Taylor em torno de x = α. Assim o algoritmo do MNR para a
equação fica sendo:
f (x) =
1
(x − α)q f (q) (ε), ε entre x e α,
q!
f 0 (x) =
1
(x − α)q−1 f (q) (ε), ε entre x e α.
(q − 1)!
f (x)
, obtém-se
f 0 (x)
u(x)
(x − α)q f (q) (ε)
lim
= lim
1
x→α x − α
x→α
q!
(x − α)q−1 f (q) (ε)(x − α)
(q − 1)!
Fazendo u(x) =
= lim
(q − 1)!
q!
= lim
1
q
x→α
x→α
=
=
1
q
lim
(q − 1)!
q(q − 1)!
6= 0.
Observe que:
f (xn )
e
f 0 (xn )
f 0 (xn )f 0 (xn ) − f (xn )f 00 (xn )
f (xn )f 00 (xn )
0
u (xn ) =
=1− 0
.
[f 0 (xn )]2
f (xn )f 0 (xn )
u(xn ) =
Daı́, u0 (xn ) = 1 −
f 00 (xn )
u(xn ),
f 0 (xn )
n = 0, 1, 2, ...
CAPÍTULO 1. RAÍZES REAIS E RAÍZES COMPLEXAS
3
Logo,
xn+1 = xn −
u(xn )
u0 (xn )
(B)
resulta no algoritmo do MNR para u(xn ) = 0
No exemplo a seguir teremos um quadro em que os resultados na terceira
coluna são obtidos pela fórmula acima (B).
Exemplo 1.1. A raiz positiva da equação x4 − 1 = 0 é de multiplicidade
dois. Tomando x0 = 0, 5, determine essa raiz por meio dos métodos MNR e
MNR modificados conforme A e B.
Temos que: f (x) = x4 − 1
f 0 (x) = 4x3
f 00 (x) = 12x2
Pelo MNR
xn+1 = xn −
f (xn )
4(xn )3 − 1
=⇒
x
=
x
−
.
n+1
n
f 0 (xn )
4(xn )3
Pelo MNR modificado A
xn+1
·
¸
4(xn )3 − 1
f (xn )
= xn − q 0
=⇒ xn+1 = xn − 2
.
f (xn )
4(xn )3
E pelo MNR modificado B
f (xn )
4(xn )3 − 1
=⇒
u(x
)
=
n
f 0 (xn )
4(xn )3
µ
¶µ
¶
f 00 (xn )
12(xn )2
4(xn )3 − 1
0
0
u (xn ) = 1 − 0
u(xn ) =⇒ u (xn ) = 1 −
.
f (xn )
4(xn )3
4(xn )3
4(xn )3 − 1
4(xn )3
µ
¶µ
¶.
xn+1 = xn −
12(xn )2
4(xn )3 − 1
1−
4(xn )3
4(xn )3
u(xn ) =
CAPÍTULO 1. RAÍZES REAIS E RAÍZES COMPLEXAS
4
No quadro abaixo, temos o resumo dos cálculos para determinação da
raı́z múltipla com n variando de 0 a 10.
x0
x1
x2
x3
x4
x5
x6
x7
x8
x9
x10
1.3
MNR
0, 5000
2, 3750
1, 7999
1, 3928
1, 1371
1, 0229
1, 0008
1, 0000
1, 0000
1
MNR A
0, 5000
4, 2500
2, 1315
1, 1174
0, 91709
1, 1068
0, 92218
1, 0987
0, 92637
1, 0921
0, 9299
MNR B
0, 5000
0, 65306
0, 82097
0, 95068
0, 9963
0, 99998
1
Método de Newton-Raphson para Raı́zes
Complexas
Considere como problema resolver a equação f (z) = 0.
Sendo
z = x + iy um número complexo, a equação pode ser escrita como
f (z) = U (x, y) + iV (x, y). Assim o MNR fica sendo
zn+1 = zn −
f (zn )
, com n = 0, 1, 2, ...
f 0 (zn )
tal que f 0 (zn ) = Ux (x, y)+iVx (x, y) = Vy (x, y)−iUx (x, y), devido às equações
de Cauchy-Riemann para derivação de funções de variáveis complexas.
Temos que
zn+1 = zn −
f (zn )
,
f 0 (zn )
zn+1 = zn −
U (xn , yn ) + iV (xn , yn )
.
Ux (xn , yn ) + iVx (xn , yn )
Multiplicando
o
segundo
Ux (xn , yn ) + iVx (xn , yn )
teremos:
Ux (xn , yn ) + iVx (xn , yn )
membro
da
igualdade
por
CAPÍTULO 1. RAÍZES REAIS E RAÍZES COMPLEXAS
zn+1 = zn −
U (xn , yn )Ux (xn , yn ) − iU (xn , yn )Vx (xn , yn ) + iV (xn , yn )Ux (xn , yn ) − i2 V (xn , yn )Vx (xn , yn )
[Ux (xn , yn )]2 + iVx (xn , yn )Ux (xn , yn ) − iUx (xn , yn ) + iVx (xn , yn ) − [iVx (xn , yn )]2
zn+1 = xn + iyn −
zn+1 = xn −
5
U (xn , yn )Ux (xn , yn ) + V (xn , yn )Vx (xn , yn ) + i[V (xn , yn )Ux (xn , yn ) − U (xn , yn )Vx (xn , yn )]
2 (x , y ) + V 2 (x , y )
Ux
n
n
n
n
x
U (xn , yn )Ux (xn , yn ) + V (xn , yn )Vx (xn , yn )
2 (x , y )
Ux
n
n
+
Vx2 (xn , yn )
"
+ i yn −
V (xn , yn )Ux (xn , yn ) − U (xn , yn )Vx (xn , yn )
2 (x , y )
Ux
n
n
+
Vx2 (xn , yn )
Como zn+1 = xn+1 + i yn+1 , então:
xn+1 = xn −
U (xn , yn )Ux (xn , yn ) + V (xn , yn )Vx (xn , yn )
Ux2 (xn , yn ) + Vx2 (xn , yn )
yn+1 = yn −
V (xn , yn )Ux (xn , yn ) − U (xn , yn )Vx (xn , yn )
Ux2 (xn , yn ) + Vx2 (xn , yn )
A f (zn ) e f 0 (zn ) são obtidas pelo método acima quando a equação não
é polinomial, se for polinomial podem ser obtidas por métodos de menor
esforço computacional, como por exemplo: Álgebra Computacional, pacote
do Maple ou Matemática ou qualquer Software de Computação Algébrica.
Exemplo 1.2. Determine a raiz complexa da equação z 2 + 1 = 0:
Temos que
z 2 + 1 = 0 =⇒ (x + iy)2 + 1 = 0 =⇒ x2 + 2ixy − y 2 + 1 = 0
U (xn , yn ) = x2n − yn2 + 1
U (xn , yn ) = 2xn yn
Ux (xn , yn ) = 2xn
Vx (xn , yn ) = 2yn
Tomando z0 = 1 + 2i, ou seja, x0 = 1 e y0 = 2 e usando o método acima,
obtém-se os valores abaixo:
#
CAPÍTULO 1. RAÍZES REAIS E RAÍZES COMPLEXAS
n
xn
0 1,00000
1 0,40000
2 0,07500
3 -0,00159
4 0,00000
yn
2,00000
1,20000
0,97500
0,99731
1,00000
Un
-2,00000
-0,28000
0,05500
0,00538
Vn
4,00000
0,96000
0,14625
-0,00317
Uxn
2,00000
0,80000
0,15000
-0,00318
6
Vxn
4,00000
2,40000
1,95000
1,99462
Logo, a raiz da equação acima é 0 ± 1i, ou simplesmente, ± i, com cinco
casas decimais.
Capı́tulo 2
Aproximação Linear
2.1
Introdução
Alguns métodos para solução de equações a uma variável podem ser
generalizados para sistemas de equações não-lineares. Neste capı́tulo
apresentaremos um método usado com freqüencia para resolução desse tipo
de sistema e também aspectos matemáticos da teoria de aproximação de
funções em espaços vetoriais. Será abordado o Método dos Mı́nimos Quadrados numa perspectiva diferente da interpolação, ou seja, não será exigido que
a função de aproximação interpole a função em determinados pontos, a idéia é
que a função de aproximação assuma valores de forma a minimizar a distância
entre seus valores e os pontos dados.
2.2
Sistemas de Equações não-Lineares
Um sistema de equação não-linear com n
na forma
f1 (x1 , x2 , · · · , xn )
f2 (x1 , x2 , · · · , xn )
..
.
f (x , x , · · · , x )
n
1
2
n
equações e n incógnitas é dada
= 0
= 0
..
.
= 0
ou vetorialmente por F (X) = 0, onde X = [x1 , x2 , · · · , xn ]T é o vetor de
incógnitas F (X) = [f1 (X), f2 (X), f3 (X), · · · , fn (X)]T e 0 é o vetor nulo de
Rn .
7
CAPÍTULO 2. APROXIMAÇÃO LINEAR
8
Vejamos um método que é usado com frequencia para resolução desse
tipo de sistema.
2.2.1
Método das aproximações sucessivas (MAS)
Esse método consiste em resolver um sistema
x1 = φ1 (x1 , x2 , · · · , xn )
x2 = φ2 (x1 , x2 , · · · , xn )
..
..
.
.
xn = φn (x1 , x2 , · · · , xn )
de equações na forma
,
(2.1)
onde as aproximações para a solução são atualizadas (usando o Método de
Jacobi) pelo seguinte sistema recorrente
(k+1)
(k)
(k)
(k)
x1
= φ1 (x1 , x2 , · · · , xn )
(k+1)
(k)
(k)
(k)
x2
= φ2 (x1 , x2 , · · · , xn )
..
..
.
.
(k)
(k)
(k)
(k+1)
= φn (x1 , x2 , · · · , xn )
xn
,
(2.2)
ou na forma vetorial
X (k+1) = Φ(X (k) ), K = 0, 1, 2, 3, · · · , sendo
(k+1)
X (k+1) = [x1
(k+1)
, x2
(k+1) T
, · · · , xn
]
Φ(X (k) ) = [φ1 (X (k) ), φ2 (X (k) ), φn (X (k) )]T .
Vejamos agora uma condição suficiente para convergência desse método.
Seja α = [α1 , α2 , ..., αn ] uma solução para (2.1), então α = Φ(α). Supondo
∂φi
que as derivadas parciais dij (X) =
(X), 1 ≤ i, j ≤ n existam para
∂φj
X ∈ Bρn , onde Bρn = {X ∈ Rn : |X − α| < ρ}. A matriz formada com os
elementos dij (X) é denominada por J(X). Então a condição suficiente para
que (2.2) seja convergente para todo X (0) ∈ Bρn é que
||J(X)|| < m < 1, X ∈ Bρn
e implica que ||Φ(X) − Φ(Y )|| ≤ m||X − Y ||, para todo X, Y ∈ Bρn e, nesse
caso, chamamos a função Φ de contração.
CAPÍTULO 2. APROXIMAÇÃO LINEAR
9
Se ||J(X)|| < 1, logo Φ é uma contração1 . Daı́, pelo Teorema do Ponto
Fixo para Contrações existe o ponto fixo, é único, e ainda, a sequência
X (k+1) = Φ(X (k) ) K = 0, 1, 2, 3, · · · , converge para esse ponto fixo.
Exemplo 2.1. Determine a solução real do sistema de equações abaixo utilizando o MAS.
½ 2
3x1 + x2 =
3, 5
.
3
x1 + x2 = 1, 625
Reescrevendo o sistema na forma X = Φ(X), temos
½
x1 = [(3, 5 − x2 )/3]1/2
.
x2 = (1, 625 − x1 )1/3
Assim, φ1 (x1 , x2 ) = [(3, 5 − x2 )/3]1/2 , φ2 (x1 , x2 ) = (1, 625 − x1 )1/3 e a
matriz J(X) fica sendo
−1
0
6[(3, 5 − x2 )/3]1/2 .
J(X) =
−1
0
3(1, 625 − x1 )2/3
Estabelecer uma vizinhança para a solução onde se verifica que
||J(X)|| < 1 para qualquer X nessa vizinhança garantirá a convergência
do método. Mas nem sempre é possı́vel estabelecer essa vizinhança, no R2 ,
por exepmlo, por vezes é possı́vel estabelecê-la baseando-se em considerações
geométricas.
(0)
(0)
Assim, tomando x1 = 0, 8 e x2 = 0, 8, obtêm-se os resultados mostrados
na tabela abaixo:
k
0
1
2
3
4
5
6
7
8
9
10
1
Veja em [5]
(k)
x1
0,800000
0,948683
0,924141
0,934920
0,933048
0,933865
0,933722
0,933784
0,933777
0,933778
0,933778
(k)
x2
0,800000
0,937889
0,877775
0,888267
0,883690
0,884488
0,884140
0,884201
0,884177
0,884177
0,884177
CAPÍTULO 2. APROXIMAÇÃO LINEAR
2.3
10
Aproximação de função a uma variável
real
Uma função f será aproximada por uma função f ∗ (x) =
n
X
ci ϕi (x),
i=0
0 ≤ i ≤ n , onde ϕi são n + 1 funções escolhidas apropriadamente e ci
são n + 1 parâmetros a determinar. A função f pode ser conhecida de
diferentes maneiras. Uma delas é utilizando tabelas de valores funcionais
(xi , f (xi )), 0 ≤ i ≤ n, escritas em forma de vetor [f (x0 ), f (x1 ),
f (x2 ), · · · , f (xm )]T .
Para achar as constantes ci vamos adotar o critério f ∗ (xi ) = f (xi ),
0 ≤ i ≤ m. Temos o sistema
c0 ϕ0 (x0 ) + c1 ϕ1 (x0 ) + · · · + cn ϕn (x0 ) = f (x0 )
..
..
..
..
.
.
.
.
c ϕ (x ) + c ϕ (x ) + · · · + c ϕ (x ) = f (x )
0 0 m
1 1 m
n n m
m
Se m = n e ϕi forem linearmente independentes então o sistema será
determinado com uma única solução. Essa maneira de determinar a f ∗ é
conhecida como interpolação. Se m > n o sistema tem mais equações que
incógnitas, sendo chamado sobredeterminado e as equações serão satisfeitas
apenas aproximadamente. A sobredeterminação é usada para dois diferentes
tipos de regularização: reduzir o efeito de erros aleatórios nos valores das
funções e dar à curva uma forma regular.
Trataremos agora de aproximação de funções pelo Método dos Mı́nimos
Quadrados, para isso representaremos funções como vetores. Seja Pn (x) =
c0 + c1 x + · · · + cn xn um elemento do conjunto de vetores de ordem n, determinado por c0 , c1 , · · · , cn , seus n + 1 coeficientes, que podem ser vistos como
coordenadas de um vetor no espaço de funções de dimensão n + 1. Assim,
ao olhar um vetor, é possı́vel tratar de um elemento num espaço de funções
e não mais de um elemento do espaço Rn .
Para ralizar as medidas nesse espaço, definiremos NORMA no espaço das
funções contı́nuas num intervalo [a, b] como:
µZ
b
kf kp =
p
¶ p1
|f (x)| dx
a
Norma máxima: kf k∞ = maxa≤x≤b |f (x)|
;p ≥ 1
CAPÍTULO 2. APROXIMAÇÃO LINEAR
·Z
b
Norma euclidiana: kf k2 =
|f (x)|2 dx
11
¸ 12
a
·Z
b
Norma euclidiana ponderada: kf k2,w =
2
¸ 21
|f (x)| w(x)dx
, onde w é
a
a função peso.
Muitos métodos de aproximações são fundamentados na minimização de
alguma norma da função erro:
y = f∗ − f
onde f ∗ é construı́da para aproximar a f .
Pergunta-se: Qual a melhor norma?
Isso depende da f. Quando a norma euclidiana for a escolhida, a solução
do problema será a generalização do que acontece em R2 e R3 , isto é, a menor
distância de um ponto a um subespaço linear é o comprimento do vetor que
é perpendicular ao subespaço gerado por {ϕi }ni=o .
Figura 2.1: A reta que melhor se aproxima dos valores dados na perspectiva
do método dos mı́nimos quadrados.
2.3.1
Aproximação pelos Mı́nimos Quadrados
Considere uma fuñção contı́nua f em [a, b] para ser aproximada por uma
combinação linear
f ∗ (x) = c0 ϕ0 + c1 ϕ1 (x) + · · · + cn ϕn (x),
CAPÍTULO 2. APROXIMAÇÃO LINEAR
12
de n + 1 funções ϕi , 0 ≤ i ≤ n.
A norma euclidiana ponderada do vetor erro f ∗ − f é
Z b
∗
2
kf − f k =
|f ∗ (x) − f (x)|2 w(x)dx, (contı́nuo)
a
kf ∗ − f k2 =
n
X
|f ∗ (xi ) − f (xi )|2 wi , (discreto)
i=0
ou seja, os coeficientes ci , 0 ≤ i ≤ n são determinados para que o vetor
erro f ∗ − f seja perpendicular ao subespaço gerado por {ϕi }ni=o .
2.3.2
Sistemas Ortogonais
As definições apresentadas a seguir serão utilizadas para encontrar a
solução do problema de aproximações.
Considere U um espaço vetorial linear. Sobre U define-se um funcional
linear entre dois elementos do espaço chamado produto interno, denotado e
definido abaixo.
Definição 2.1. (Produto Interno) (u, u) = |u||u|cosθ = |u||u|cos0◦ = |u||u| =
|u|2 .
Seja f uma função escrita como combinação linear. Pela definição acima
temos que
2
kf k =
Rb
a
2
2
|f (x)| dx ou kf k =
n
X
|f (xi )|2 .
i=0
Logo, kf k2 = (f, f ).
Ou seja, a norma provém do produto interno.
Definição 2.2. (Ortogonalidade) Duas funções f e g são ditas ortogonais se
(f, g) = 0. Uma sequencia finita ou infinita de funções ϕ0 , ϕ1 , . . . , ϕn forma
um sistema ortogonal se
(ϕi , ϕj ) = 0, ∀i 6= j e kϕi k 6= 0, ∀i.
Se, além disso, kϕi k = 1, ∀i, então a sequencia é chamada de base ortonormal.
CAPÍTULO 2. APROXIMAÇÃO LINEAR
2.3.3
13
Solução do Problema de Aproximações
∗
Seja f (x) =
m
X
c∗j ϕj (x) a função de aproximação por mı́nimos quadra-
j=0
dos. Deseja-se determinar os coeficientes c∗j , 0 ≤ j ≤ m, para que o erro
f ∗ − f tenha o menor comprimento em uma dada norma.
Temos também que f ∗ − f deve ser ortogonal ao subespaço gerado por
{ϕi }ni=o , ou seja, o produto interno é igual a zero.
à m
!
X
Tomemos o vetor
cj ϕj (x) − f com cj 6= c∗j para pelo menos um j,
j=0
daı́,
m
X
m
X
cj ϕj (x) − f (x) =
j=0
cj ϕj (x) −
j=0
c∗j ϕj (x) − f ∗ (x) − f (x)
j=0
m
X
=
m
X
(cj − c∗j )ϕj (x) + [f ∗ (x) − f (x)].
j=0
Pelas propriedades do produto interno temos que (f ∗ − f ) ⊥ ϕi e
m
X
∗
(f − f ) ⊥
(cj − c∗j )ϕj . Assim,
j=0
°
°2
m
°X
°
°
°
cj ϕj (x) − f (x)° =
°
°
°
j=0
=
à m
X
cj ϕj (x) − f (x),
j=0
=
à m
X
m
X
=
(cj − c∗j )ϕj (x) + [f ∗ (x) − f (x)],
m
X
!
(cj − c∗j )ϕj (x) + [f ∗ (x) − f (x)]
j=0
(cj − c∗j )ϕj (x),
j=0
+
cj ϕj (x) − f (x)
j=0
j=0
à m
X
!
m
X
!
(cj − c∗j )ϕj (x)
j=0
à m
!
X
2
(cj − c∗j )ϕj (x), [f ∗ (x) − f (x)] + ([f ∗ (x) − f (x)], [f ∗ (x) − f (x)])
j=0
CAPÍTULO 2. APROXIMAÇÃO LINEAR
14
Portanto,
°2
° m
°2
° m
°
°
°X
°X
°
°
°
°
cj ϕj (x) − f (x)° + kf ∗ (x) − f (x)k2
cj ϕj (x) − f (x)° = °
°
°
°
°
°
j=0
j=0
≥ kf ∗ (x) − f (x)k2 .
Logo, f ∗ − f é o menor vetor que é ortogonal a todas as funções {ϕi }ni=o .
Exemplo 2.2. : Considere a função f especificada pelos valores funcionais:
x
f
0
0
1
1
2
4
1) Vamos aproximar f por f ∗ (x) = c∗0 + c∗1 x.
Temos: ϕ0 (x) = 1 e ϕ1 (x) = x
½
(ϕ0 , ϕ0 )c∗0 + (ϕ0 , ϕ1 )c∗1 = (ϕ0 , f )
(ϕ1 , ϕ0 )c∗0 + (ϕ1 , ϕ1 )c∗1 = (ϕ1 , f )
Substituindo os valores numéricos:
µ
¶µ ∗ ¶ µ ¶
3 3
c0
5
=
∗
3 5
c1
9
½ ∗
3c0 + 3c∗1 = 5
3c∗0 + 5c∗1 = 9
Resolvendo
o
sistema
acima,
temos
1
daı́, f ∗ (x) = − + 2x (ver figura 2.2) e
3
1
1
f ∗ (0) = − + 2.0 = − = −0, 33333
3
3
5
1
f ∗ (1) = − + 2.1 = ' 1, 66667
3
3
1
11
f ∗ (2) = − + 2.2 =
' 3, 66667.
3
3
c∗0
=
−
1
3
e
c∗1
=
2,
CAPÍTULO 2. APROXIMAÇÃO LINEAR
15
Verifiquemos f ∗ (x) − f (x) em cada ponto da função:
1
1
f ∗ (0) − f (0) = − − 0 = − ' −0, 33333
3
3
5
2
f ∗ (1) − f (1) = − 1 = ' 0, 66667
3
3
11
1
f ∗ (2) − f (2) =
− 4 = − ' −0, 33333.
3
3
Logo, o erro kf ∗ (x) − f (x)k ' k − 0, 33333 + 0, 66667 − 0, 33333k ' 0, 00001.
12
10
F(x) = -1/3 + 2x
8
6
4
2
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
2
4
6
8
10
12
14
16
18
20
-2
-4
-6
-8
-10
-12
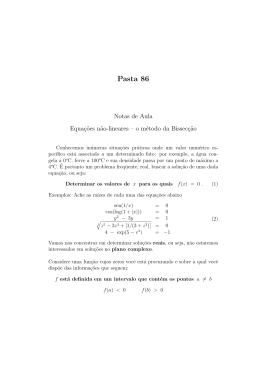
Figura 2.2: Função de Aproximação com ϕ0 e ϕ1 escolhidas.
2) Vamos aproximar f por f ∗ (x) = c∗0 + c∗1 x + c∗2 x2 .
Temos: ϕ0 (x) = 1, ϕ1 (x) = x e ϕ2 (x) = x2
(ϕ0 , ϕ0 )c∗0 + (ϕ0 , ϕ1 )c∗1 + (ϕ0 , ϕ2 )c∗2 = (ϕ0 , f )
(ϕ1 , ϕ0 )c∗0 + (ϕ1 , ϕ1 )c∗1 + (ϕ1 , ϕ2 )c∗1 = (ϕ1 , f )
(ϕ2 , ϕ0 )c∗0 + (ϕ2 , ϕ1 )c∗1 + (ϕ2 , ϕ2 )c∗1 = (ϕ2 , f )
Substituindo os valores numéricos:
∗
5
3 3 5
c0
3 5 9 c∗1 = 9
c∗2
17
5 9 17
CAPÍTULO 2. APROXIMAÇÃO LINEAR
16
∗
3c0 + 3c∗1 + 5c∗2 = 5
3c∗ + 5c∗1 + 9c∗2 = 9
∗0
5c0 + 9c∗1 + 17c∗2 = 17
Resolvendo o sistema acima, temos c∗0 = 0, c∗1 = 0 e c∗2 = 1,
daı́, f ∗ (x) = x2 (ver figura 2.3) e
f ∗ (0) = 0
f ∗ (1) = 1
f ∗ (2) = 4.
Verifiquemos f ∗ (x) − f (x) em cada ponto da função:
f ∗ (0) − f (0) = 0
f ∗ (1) − f (1) = 0
f ∗ (2) − f (2) = 0.
Logo, o erro kf ∗ (x) − f (x)k = 0. Nesse caso temos a interpolação.
12
F(x) = x²
10
8
6
4
2
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
2
4
6
8
10
12
14
16
18
20
-2
-4
-6
-8
-10
-12
Figura 2.3: Função de Aproximação com ϕ0 , ϕ1 e ϕ2 escolhidas.
CAPÍTULO 2. APROXIMAÇÃO LINEAR
17
3) Vamos aproximar f por f ∗ (x) = c∗0 + c∗1 x + c∗2 x2 + c∗3 x3 .
Temos: ϕ0 (x) = 1, ϕ1 (x) = x, ϕ2 (x) = x2 e ϕ3 (x) = x3
(ϕ0 , ϕ0 )c∗0 + (ϕ0 , ϕ1 )c∗1 + (ϕ0 , ϕ2 )c∗2 + (ϕ0 , ϕ3 )c∗3
(ϕ1 , ϕ0 )c∗0 + (ϕ1 , ϕ1 )c∗1 + (ϕ1 , ϕ2 )c∗1 + (ϕ1 , ϕ3 )c∗3
(ϕ2 , ϕ0 )c∗0 + (ϕ2 , ϕ1 )c∗1 + (ϕ2 , ϕ2 )c∗1 + (ϕ2 , ϕ3 )c∗3
(ϕ23 , ϕ0 )c∗0 + (ϕ3 , ϕ1 )c∗1 + (ϕ3 , ϕ2 )c∗1 + (ϕ3 , ϕ3 )c∗3
Substituindo os valores numéricos:
∗
3 3 5 9
c0
3 5 9 17 c∗1
5 9 17 33 c∗2 =
c∗3
9 17 33 65
∗
3c + 3c∗1 + 5c∗2 + 9c∗3
=
0∗
∗
∗
∗
3c0 + 5c1 + 9c2 + 17c3
=
∗
∗
∗
∗
5c + 9c1 + 17c2 + 33c3 =
0∗
9c0 + 17c∗1 + 33c∗2 + 65c∗3 =
=
=
=
=
(ϕ0 , f )
(ϕ1 , f )
(ϕ2 , f )
(ϕ3 , f )
5
9
17
33
5
9
17
33
Resolvendo o sistema acima, temos c∗0 = 0, c∗1 = 0, c∗2 = 1 e c∗3 = 0,
daı́, f ∗ (x) = x2 (ver figura 2.4) e o erro kf ∗ (x) − f (x)k = 0, como no
caso anterior.
12
F(x) = x²
10
8
6
4
2
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
2
4
6
8
10
12
14
16
18
20
-2
-4
-6
-8
-10
-12
Figura 2.4: Função de Aproximação com ϕ0 , ϕ1 , ϕ2 e ϕ3 escolhidas.
CAPÍTULO 2. APROXIMAÇÃO LINEAR
2.3.4
18
Redução ao Ajuste Linear
∗
Tendo em vista a forma linear expressa por f (x) =
n
X
ci ϕi (x), podemos
i=0
perceber a não-linearidade, por exemplo, através de um gráfico de valores
(xi , f (xi )), onde sua dispersão apresenta um comportamento não-linear.
Vejamos as transformações que ocorrem com maior frequência nos
problemas de ajuste de curvas que levam à forma linear.
Dispersão do tipo: f (x) ≈ α1 e−α2 x , α1 , α2 > 0
³ α ´
1
z = ln f ≈ ln α2 x ≈ ln α1 − ln eα2 x ≈ ln α1 − α2 x.
e
Fazendo c1 = ln α1 , c2 = −α2 e y = c1 + c2 x, teremos:
ln f ≈ c1 + c2 x = y
Podemos observar que:
• y é linear nos parâmetros c1 e c2 , podendo ser determinados pelo método
dos mı́nimos quadrados, identificando-se o conjunto {ϕi }ni=o = {1, x}.
• o ajuste é em ln f e não em f .
• c1 e c2 ajustam por mı́nimos quadrados ln f .
Dispersão do tipo: f (x) ≈
z=
Logo, α1 e α2 ajustam
1
α1 + α2 x
1
≈ α1 + α2 x.
f
1
por mı́nimos quadrados.
f
Dispersão do tipo exponencial: f (x) ≈ α1 α2x
Supondo f > 0, tem-se
z = ln f ≈ ln α1 α2x ≈ ln α1 + x ln α2 .
Fazendo c1 = ln α1 , c2 = ln α2 e y = c1 + c2 x, teremos:
CAPÍTULO 2. APROXIMAÇÃO LINEAR
19
ln f ≈ c1 + c2 x = y
As observações são semelhantes às do primeiro tipo de dispersão apresentada acima.
Dispersão do tipo geométrica: f (x) ≈ α1 xα2
Supondo f > 0 e x > 0, tem-se
z = ln f ≈ ln α1 xα2 ≈ ln α1 + ln xα2 ≈ ln α1 + α2 ln x.
Fazendo c1 = ln α1 , c2 = α2 e y = c1 + c2 ln x, teremos:
ln f ≈ c1 + c2 ln x = y
Percebemos que y é linear em c1 e c2 . A determinação desse parâmetros
pode ser feita por mı́nimos quadrados, identificando-se para isso o conjunto
{ϕi }ni=o = {1, ln x}.
Vamos resolver o exemplo (2.2) usando a dispersão do tipo f (x) ≈ α1 e−α2 x ,
α1 , α2 > 0 .
Temos f ∗ (x) = c1 + c2 x
1
3
1
ln α1 = c1 = 2 =⇒ α1 = e2 =⇒ α1 ' 7, 39 e c2 = −α2 =
3
ϕ0 (x) = 1 e ϕ1 (x) = x, c1 = 2 e c2 = −
1
f ∗ (x) ' 7, 39 + e− 3 x (ver figura 2.5).
f ∗ (0) ' 7, 39
1
f ∗ (1) ' 7, 39 + e(− 3 ) ' 5, 31
2
f ∗ (2) ' 7, 39 + e(− 3 ) ' 3, 82.
kf ∗ − f k ' k(7, 39 − 0) + (5, 31 − 1) + (3, 82 − 4) ' k7, 39 + 4, 31 − 0, 18k
' 11, 52.
CAPÍTULO 2. APROXIMAÇÃO LINEAR
20
2 (-1/3)x
F(x) = e e
12
10
8
6
4
2
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
2
4
6
8
10
12
14
16
18
20
-2
-4
-6
-8
-10
-12
Figura 2.5: Função de Aproximação por redução ao ajuste linear - dispersão
tipo f (x) ≈ α1 e−α2 x .
Gráfico comparativo das quatro funções de aproximações apresentadas
neste capı́tulo.
12
10
8
6
4
2
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
2
-2
-4
-6
-8
-10
-12
4
6
8
10
12
14
16
18
20
Referências Bibliográficas
[1] Peter Albrecht. Análise Numérica: um curso moderno. Livros Técnicos
e Cientı́ficos, 1973.
[2] Flaulles Boone Bergamaschi. Apostila: Cálculo Numérico com Matlab.
(2005).
[3] Flaulles Boone Bergamaschi. Comparando os teoremas que tratam sobre
o limite dos zeros de um polinômio. VI Ermac-R3, (2005).
[4] Flaulles Boone Bergamaschi. Limite dos Zeros de um Polinômio. V
Ermac-R3,(2005).
[5] Elon Lajes Lima. Curso de Análise, vol.2. Ed. SBM, 1999.
[6] Márcia A. Gomes e Vera Lúcia da Rocha Lopes Ruggiero. Cálculo
Numérico: aspectos teóricos e computacionais. Ed. McGraw-Hill, 1988.
[7] Dercio Sperandio. Cálculo Numérico: caracteristicas matematicas e computacionais dos métodos numéricos. Ed. Prentice Hall, 2003.
21
Baixar