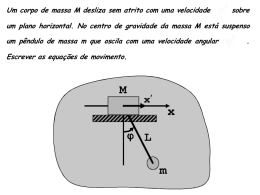
Aula 17: Dinâmica de Sistemas Mecânicos: Variáveis Generalizadas: Sistema Holonômico Generalizado: Velocidades, Forças e Quantidades de Movimento Generalizadas. Exemplo. Sistema Holonômico Generalizado Se todos os vínculos em um sistema dinâmico são holonômicos, o sistema é dito ser holonômico. Usando coordenadas generalizadas é possível desenvolver uma representação generalizada que se aplica a sistemas holonômicos de complexidade arbitrária. Na representação generalizada é conveniente introduzir velocidades generalizadas, forças generalizadas, e quantidades de movimento associadas às coordenadas generalizadas. Considere um sistema holonômico de N partículas de massa mi (i = 1,..., N), como indicado na Fig. 37. Seja ηl, η2, ..., ηm (195) um conjunto completo de coordenadas generalizadas. Por exemplo, as coordenadas cartesianas das partículas. Nesse caso, m = 3N. Se alguns vínculos já foram subtraídos ao estabelecer as coordenadas (195), então m < 3N. Por exemplo, se certa partícula é vinculada ao plano XY, a coordenada Z para a partícula pode ser omitida em (195). Supondo que ainda há p vínculos a serem subtraídos, o conjunto (195) não é independente e os vínculos holonômicos são da forma hl(ηl, η2, ..., ηm, t) = 0 h2(ηl, η2, ..., ηm, t) = 0 ................................. (196) hp(ηl, η2, ..., ηm, t) = 0. O rolamento vinculado (184) e o vínculo variável no tempo (186) são exemplos de vínculos da forma (196). Fig. 37 - Sistema de N partículas de massa sujeitas a vínculos holonômicos (não mostrados). O sistema tem n graus de liberdade com 1 ≤ n ≤ 3N. 72 Uma vez que há p vínculos entre as m coordenadas, existem apenas n = m − p coordenadas independentes, e o sistema têm n graus de liberdade. Ocasionalmente, é conveniente empregar o conjunto redundante (195) e incluir as relações de vínculo (196), por meio das técnicas descritas na aula 15. Na maioria dos casos é mais conveniente selecionar desde o início, um conjunto de coordenadas generalizadas, ξl, ξ2, ..., ξn, (197) que é completo e independente e para o qual o correspondente conjunto de variações, δξl, δξ2, ..., δξn, (198) é também um conjunto completo e independente. Qualquer configuração admissível do sistema pode ser representada pelas coordenadas (197), e qualquer variação admissível pode ser representada pelo conjunto (198). A análise de sistemas holonômicos é geralmente mais simples em termos de tais coordenadas. O vetor posição Ri de qualquer partícula mi na Fig. 37 é dado pelas coordenadas (197) e, se houver vínculos variáveis no tempo, pelo tempo t, Ri = Ri(ξl, ξ2, ..., ξn, t). (199) A velocidade dessa partícula é dada por vi = n dR i ∂R ∂R i = ∑ i ξ& j + . dt ∂t j =1 ∂ξ j (200) As derivadas temporais das coordenadas generalizadas, ξ& j , são chamadas de velocidades generalizadas. A equação (200) indica que as velocidades reais das partículas são geralmente combinações complicadas das velocidades generalizadas. O termo final à direita de (200) representa o efeito (se houver) de um vínculo externo variável no tempo. Na abordagem variacional consideram-se configurações admissíveis vizinhas no mesmo instante de tempo. A variação da posição do vetor Ri da i-ésima partícula da Fig. 37 é expressa em termos das variações das coordenadas generalizadas pela variação de (199), ou seja, n ∂R (201) δR i = ∑ i δξ j . j =1 ∂ξ j Forças Generalizadas Suponha agora que sobre cada partícula mi da Fig. 37 age uma força fi. Determinemos o incremento de trabalho total realizado por este conjunto de forças sob uma variação admissível de configuração do sistema. Usando (201), tem-se 73 N ∑f i =1 N i n • δR i = ∑∑ f i • i =1 j =1 ∂R i δξ j ∂ξ j n N ∂R i = ∑ ∑ fi • δξ j . ∂ξ j j =1 i =1 (202) Cada um dos n parênteses em (202) é constituído pelo somatório das N componentes das forças reais ao longo das direções δRi resultantes de um incremento numa única coordenada generalizada ξj. Estes somatórios são denominados de forças generalizadas e são denotados por N ∂R i , j = 1, 2, ..., n. (203) Ξ j = ∑ fi • ∂ξ j i =1 Substituindo (203) em (202), tem-se N ∑f i =1 n i • δR i = ∑ Ξ j δξ j . (204) j =1 O incremento total de trabalho das forças reais que atuam no sistema ao longo dos deslocamentos δRi é igual ao incremento total de trabalho das forças generalizadas atuando ao longo dos deslocamentos generalizados correspondentes δξj. Uma vez que cada termo de (204) tem dimensão de trabalho, as dimensões de Ξj dependem das dimensões de ξj. Se ξj tem a dimensão de comprimento, então Ξj tem a dimensão de força, se ξj representa um ângulo, então Ξj tem a dimensão de torque. Quando é necessário obter a força generalizada Ξj correspondente a um determinado conjunto de forças reais fi, pode-se usar a fórmula (203), ou pode-se usar a (204) e o fato das variações (198) serem independentes, como segue: Para obter Ξ1, por exemplo, considere a variação na qual todas as δξj são nulas exceto δξ1. Estude a geometria do sistema para determinar o δRi correspondente e avaliar o lado esquerdo de (204). Uma vez que o lado direito é simplesmente Ξ1 δξ1, a força generalizada Ξ1 é obtida dividindo ambos os lados por δξ1. A natureza do conjunto das forças reais fi e das forças generalizadas correspondentes Ξj pode ser arbitrária, ou seja, as forças generalizadas podem ser usadas para descrever qualquer um dos seguintes conjuntos de forças: todas as forças que atuam no sistema, as forças externas, forças internas, as forças conservativas, as forças não-conservativas, ou qualquer outro conjunto bem definido de forças. Neste curso, as forças generalizadas Ξj são usadas mais comumente para descrever as forças não-conservativas que atuam num sistema. Quantidades de Movimento Generalizadas Para o sistema holonômico da Fig. 37, a co-energia cinética é dada por 74 N N i =1 i =1 T ∗ = ∑ Ti * = ∑ ∫ p i • dv i . vi (205) 0 Para a partícula de massa mi movendo-se no espaço tridimensional tem-se que a derivada da co-energia cinética Ti* em relação à velocidade vi da partícula resulta na quantidade de movimento pi da partícula, isto é, ∂Ti * ∂ vi = p i • dv i = p i . ∂v i ∂v i ∫0 (206) Substituindo (200) em (205) observa-se que T* é uma função das coordenadas generalizadas ξi, das velocidades generalizadas ξ&i , e do tempo t. A derivada da co-energia cinética (205) em relação à velocidade generalizada ξ& é denominada de quantidade de k movimento generalizada, πk, correspondente à coordenada ξk. Usando (200), tem-se πk = N N N ∂T ∗ ∂Ti* ∂v i ∂v i ∂R i . p pi • = • = • = ∑ ∑ ∑ i & & & ∂ξ k i =1 ∂v i ∂ξ k i =1 ∂ξ k i =1 ∂ξ k (207) A quantidade de movimento generalizada, πk, é, portanto, um somatório de componentes das quantidades de movimento reais, pi, ao longo das direções dos deslocamentos δRi resultantes de um incremento δξk na coordenada generalizada ξk. Quando não há vínculos variáveis no tempo em um sistema holonômico há uma identidade interessante relacionando as quantidades de movimento reais e as generalizadas. Essa identidade é obtida expressando a soma das funções do estado cinético (108), em termos de variáveis generalizadas. Quando os vínculos variáveis com o tempo estão ausentes (200) reduz-se a n ∂R (208) v i = ∑ i ξ& j . j =1 ∂ξ j Substituindo (208) em (108), mudando a ordem do somatório e substituindo a definição de quantidade de movimento generalizada (207), obtém-se n N N ∂R n T + T ∗ = ∑ v i • p i = ∑ ξ& j ∑ i • p i = ∑ ξ& jπ j . i =1 ∂ξ j =1 j =1 i =1 j (209) Assim, a soma T + T* para um sistema com vínculos invariantes no tempo pode ser obtida somando os produtos escalares entre as velocidades reais vi e as quantidades de movimento correspondentes pi; ou pela soma dos produtos das velocidades generalizadas ξ& j e as quantidades de movimento generalizadas correspondentes, πj. Observe o paralelismo entre a definição (203) para a força generalizada e a definição (207) para a quantidade de movimento generalizada. Observe também o paralelismo entre (204) e (209). Em (204) 75 tem-se que a soma dos produtos escalares entre as forças e os deslocamentos reais é igual à soma dos produtos entre as forças e os deslocamentos generalizados. Em (209) tem-se que a soma dos produtos escalares entre as velocidades e as quantidades de movimento reais é igual à soma dos produtos entre as velocidades e quantidades de movimento generalizadas. Exemplo. Para ilustrar as relações entre velocidades, forças e quantidades de movimento reais e velocidades, forças e quantidades de movimento generalizadas, correspondentes a uma escolha particular de coordenadas generalizadas, considere o pêndulo esférico mostrado na Fig. 38. Uma única partícula de massa m é suspensa por uma haste rígida, de massa desprezível, de comprimento a, a partir de uma junta esférica, de atrito desprezível, na origem. Este é um sistema holonômico com dois graus de liberdade e sem vínculos forçantes, externos, variantes no tempo. Os ângulos φ e θ indicados na Fig. 38 formam um conjunto completo e independente de coordenadas generalizadas: ξl = θ, ξ2 = φ. O vetor posição R da partícula de massa é R = a sin θ cos φ uX + a sin θ sin φ uY − a cos θ uZ, (210) que é uma ilustração de (199). Derivando (210) em relação ao tempo, obtém-se v= ( ) dR = a θ& cosθ cos ϕ − ϕ& sin θ sin ϕ u X dt + a θ& cos θ sin ϕ + ϕ& sin θ cos ϕ uY + aθ& sin θu Z . ( ) Fig. 38 - Pêndulo esférico com a força que age paralelamente ao eixo X. 76 (211) A velocidade real (211) é, portanto, uma função complicada das velocidades generalizadas ξ& = θ& e ξ& = ϕ& . Para comparar com o resultado geral (200) reagrupe os termos em (211), 1 2 obtendo-se v= dR = (a cosθ cos ϕu X + a cosθ sin ϕu Y + a sin θu Z )θ& dt + (− a sin θ sin ϕu X + a sin θ cos ϕu Y )ϕ& . (212) Para obter as forças generalizadas correspondentes a força real f = f0uX, usa-se (204) como segue: Para uma variação na qual ξl = θ, considere um incremento δθ enquanto δφ = 0, o trabalho realizado por f é o produto de f0 pela componente X do deslocamento δR. Esta componente é a cos θ cos φ δθ, (213) como pode ser visto diretamente a partir da geometria da Fig. 38 ou aplicando o operador variacional em (210). Substituindo (213) em (204), tem-se Ξ1δξ1 = f 0 a cosθ cos ϕδθ . (214) Agora, basta cancelar δξ1 = δθ de ambos os lados de (214), obtendo-se Ξ1 = f 0 a cosθ cos ϕ . (215) De forma similar, para uma variação na qual ξ2 = φ, considere um incremento δφ enquanto δθ = 0, resultando (216) Ξ 2 = − f 0 a sin θ sin ϕ . Observe que uma vez que ξ1 e ξ2 são ângulos, as forças generalizadas tem as dimensões de torque. Observe também que a força generalizada Ξ1 correspondente a ξl = θ pode ser interpretada como o momento de f em torno do eixo AA, que é o eixo para a rotação infinitesimal δθ. A força generalizada Ξ2 correspondente a ξ2 = φ pode ser interpretada como o momento de f em torno do eixo Z, que é o eixo para a rotação infinitesimal δφ. Para obter as quantidades de movimento generalizadas comecemos por avaliar a co-energia cinética em termos das coordenadas generalizadas. Se considerarmos a relação newtoniana entre a quantidade de movimento real p da partícula de massa e a velocidade v, p = mv, onde v é dada por (211), a co-energia cinética é ( ) T * = ½ mv 2 = ½ ma 2 θ& 2 + ϕ& 2 sin 2 θ . (217) Então, de acordo com (207), obtém-se π1 = ∂T ∗ = ma 2θ& ∂θ& π2 = 77 ∂T ∗ = ma 2ϕ& sin 2 θ . ∂ϕ& (218) Observe que a quantidade de movimento generalizada π1, correspondente a ξl = θ pode ser interpretada como o componente do momento angular da partícula em torno do eixo AA (o eixo para δθ) e que a quantidade de movimento generalizada π2, correspondente a ξ2 = φ pode ser interpretada como o componente do momento angular da partícula em torno do eixo Z (o eixo para δφ). A identidade (209) para sistemas com vínculos invariantes no tempo reduz-se, no presente caso, a v • p = ξ&1π 1 + ξ&2π 2 . (219) Usando (212) e (218), o aluno pode facilmente verificar a validade de (219). 78
Baixar