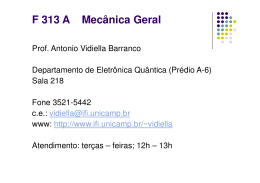
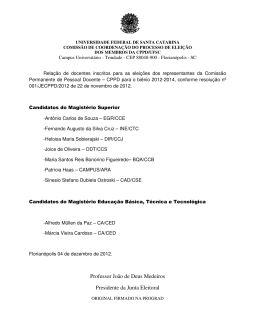
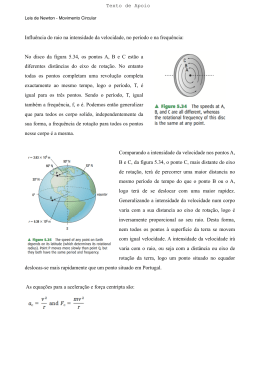
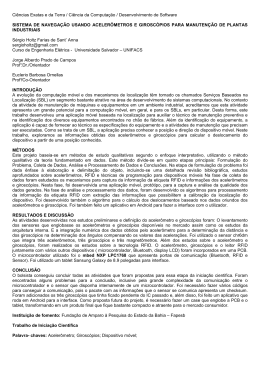
ACIONAMENTO DE UMA ARTICULAÇÃO ROBÓTICA 3D POR SERVOMOTORES VERBOSKI, José Luiz Estudante de Engenharia Elétrica: UTFPR – Universidade Tecnológica Federal do Paraná Av. Sete de Setembro, 3165, Curitiba/PR – Tel. (41) 3262-6400 [email protected] DOS SANTOS , Winderson Eugenio Professor Doutor Engenheiro Eletricista: UTFPR – Universidade Tecnológica Federal do Paraná Av. Sete de Setembro, 3165, Curitiba/PR – Tel. (41) 3310-4780 [email protected] EMMENDOERFER, Gustavo Engenheiro Eletricista: UTFPR – Universidade Tecnológica Federal do Paraná Av. Sete de Setembro, 3165, Curitiba/PR – Tel. (41) 3310-4792 [email protected] RESUMO O presente trabalho tem como escopo o acionamento de uma articulação robótica 3D por servomotores para ser utilizada em calibrações de giroscópios. Palavras-chave: Giroscópio, matrizes de rotação, robótica, LabVIEW. 1 Introdução O controle de posição através do computador é uma ferramenta bastante moderna e confiável para qualquer sistema de posição que necessite de qualidade e precisão. Sua flexibilidade e facilidade para alterações de parâmetros são suas principais virtudes e por isso sua utilização vem crescendo ao longo dos anos. Um exemplo disso é sua aplicação em calibrações de giroscópios (sensores de giro) que adquirem características individuais de acordo o processo de fabricação. Segundo [1], cada giroscópio apresenta diferentes parcelas de ruído e de bias (erro sistemático) acrescentadas ao sinal de velocidade angular. Quando os sinais de ruído e de bias são integrados juntos com o sinal de velocidade angular, surge um erro na estimativa do ângulo efetivamente deslocado. Adicionalmente, uma outra incerteza é causada pelo desconhecimento de orientação frente ao eixo de rotação da terra, pois os giroscópios são instrumentos sensíveis a ponto de serem afetados por esta rotação. Desta forma, para assegurar a precisão de giroscópios, atuou-se no acionamento de um punho robótico capaz executar movimentos extremamente precisos e conhecidos para que sejam utilizados como gabarito. 2 Metodologia O objetivo geral do projeto foi o acionamento de um punho robótico buscando precisão e dinâmica de movimentos para calibração de giroscópios. Primeiramente, foi realizado todo o embasamento teórico necessário para a execução do projeto, que envolveu: aspectos aprofundados sobre o modo de funcionamento de giroscópios, sistemas de controle de sistemas e servoacionamentos, em seguida, foram feitas as especificações das cargas e dos equipamentos. Depois da finalização destas etapas, desenvolveu-se um software de simulação e acionamento na linguagem gráfica de programação LabVIEW e então foram realizados seus testes funcionais. 3 Projeto Conceitual Após a realização de estudos, concluiu-se que o modelo conceitual utilizado no punho do projeto Roboturb1, mostrado na Figura 1, atende às especificações necessárias para ensaiar giroscópios. A precisão de posicionamento baseada em encoders incrementais e os três graus de liberdade foram os fatores preponderantes para sua escolha. 1 Roboturb: Robô manipulador destinado às tarefas de soldagem de cavitações nas pás de turbinas de usinas hidrelétricas. Figura 1 – Configuração mecânica escolhida. (LACTEC, 2001) 4 Sistema de Orientação As sucessivas rotações realizadas pelo punho robótico tornaram necessário o emprego de um sistema de orientação baseado nas matrizes de rotação de Euler que são fundamentais para os movimentos do simulador. A fim de representar a orientação espacial de um corpo rígido em relação a um eixo de coordenadas de referência (x, y, z), uma matriz de rotação é a matriz que descreve a projeção de eixo de coordenadas preso a este corpo em relação ao eixo (x, y, z) de referência adotado. Por convenção, a nomenclatura adotada para movimentos é: ângulo em torno do eixo z, ângulo em torno de y e ângulo em torno do eixo x. A matriz de rotação de um corpo rígido é obtida pelo produto das matrizes de rotações elementares conforme a Equação (1). Neste caso, os eixos de referência 1, 2 e 3 podem ser escolhidos livremente a partir de um conjunto de doze opções apresentadas por Euler, a saber: xyx, xyz, xzx, xzy, yzy, yzx, yxy, yxz, zxz, zxy, zyz e zyx; com os ângulos , e correspondentes aos respectivos ângulos , e daqueles eixos de Euler selecionados. Devido às características construtivas, sabe-se que o punho do Roboturb segue os ângulos de Euler na seqüência zyz, a qual é identificada por: rotação de em torno do eixo z, rotação de em torno do eixo y`e rotação de em torno do eixo z``, conforme a Figura 2. z` z`` z=z` y``` y`=y`` y` x z``=z``` y`` y x` x` Figura 2 – Sequência REuler = R1 (α ).R2 ( β ).R3 (γ ) x`` , e x`` x``` para um sistema zyz. (1) Partindo da Equação (1) e substituindo as matrizes de rotação elementares representadas em (2), (3) e (4), chega-se à matriz de rotação de Euler (5). cos Φ senΦ 0 R1 (Φ ) = − senΦ cos Φ 0 0 0 1 cosθ R2 (θ ) = 0 senθ 1 R3 (ψ ) = 0 0 − senθ 1 0 0 cosθ 0 0 cosψ senψ 0 − senψ R Euler 5 (2) (3) (4) cosψ cosψ . cos θ − senθ senψ . cos θ = − cos Φ.senψ + cosψ .senθ .senΦ cosψ . cos Φ + senψ .senθ .senΦ cos θ .senΦ senψ .senΦ + cosψ .senθ . cos Φ − senΦ. cosψ + senψ .senθ . cos Φ cos θ . cos Φ (5) Sistema de Controle O sistema de controle do punho é basicamente formado por um computador equipado com uma placa controladora de movimentos, servomotores, encoders, amplificadores de potência e por uma interface de comunicação que faz a interligação desses equipamentos. A Figura 3 mostra a configuração do sistema para o acionamento de um eixo. Figura 3 – Ligações entre os equipamentos. Destaca-se que a placa controladora comunica-se com os amplificadores através de sinais de corrente, desta forma os amplificadores liberam tensões proporcionais a estes sinais recebidos. O LabVIEW foi escolhido para o desenvolvimento do software de acionamento pelo fato de facilitar a programação através de seus blocos funcionais e também possuir comunicação com placas de controle. O software desenvolvido possui alguns parâmetros variáveis que estão dispostos em nove sub-painéis para serem alterados de acordo com a preferência do usuário, tais como: identificação da placa de controle (Board ID), eixo a ser movido, velocidade, aceleração e a posição absoluta desejada para o eixo. Durante o movimento são realizadas leituras de posição e cálculos de deslocamento cujos valores são apresentados nas formas de gráfica e numérica (Figura 4). Figura 4 – Painel de controle. O software possui ainda um simulador que move-se de acordo com o movimento do punho robótico para que o usuário possa monitorar seus ensaios pela tela do computador. As Figuras de 5 a 9 mostram uma simulação na qual foi aplicada ao robô uma seqüência de deslocamentos de noventa graus em torno dos eixos , e . Figura 5 – Início do movimento do eixo . Figura 6 – Início do movimento do eixo . Figura 7 – Início do movimento do eixo . Figura 8 – Posição após o término dos três movimentos. 6 Ajustes de Controle Para melhorar as respostas do punho foram feitos ajustes do controlador Proporcional Derivativo Integrativo (PID). De acordo com [3], para se obter um melhor comportamento dinâmico, deve-se utilizar compensadores para melhorar tanto a resposta transitória do sistema quanto para melhorar as características de erro em regime permanente. A resposta transitória é definida como a parte da curva de resposta devida a um sistema e a forma como esse sistema absorve ou dissipa energia; quando se tem sistemas que ficam estáveis ao longo do tempo, a resposta transitória é a parte da curva anterior ao regime permanente. Já o erro de regime permanente é definido como a diferença entre a entrada e a saída de um sistema depois de a resposta natural se reduzir a zero. Para utilizar os ajustes através de compensadores é necessário saber que quando o ganho do sistema é ajustado para se atender à especificação da resposta transitória ocorre a deterioração do desempenho em regime permanente, uma vez que a resposta transitória e a constante de erro estático estão relacionadas com o ganho. Quanto maior o ganho, menor o erro em regime permanente, porém maior a ultrapassagem percentual. Os ajustes foram realizados através de um software específico para calibração de motores que permite alterações nos parâmetros Kp (ganho proporcional), Kd (ganho derivativo) e Ki (ganho integrativo). Em cada motor foi utilizada primeiramente a função de calibração automática para encontrar uma referência dos ganhos Kp, Kd e Ki e a partir deste ponto fazer um ajuste fino com a aplicação de valores arbitrários para melhorar o controle do sistema. 7 Conclusão Durante a realização deste trabalho foi necessária a montagem eletroeletrônica de três servomotores com os demais componentes de controle para que o software fosse testado durante o seu desenvolvimento. Também foram feitas pesquisas sobre o funcionamento de giroscópios para assegurar que o modelo de articulação robótica escolhido atendesse à característica principal necessária aos ensaios, ou seja, movimento de rotação em torno de três eixos ortogonais com precisão. Com a articulação desenvolvida pode-se realizar ensaios de calibração em giroscópios, bem como verificar a ortogonalidade dos giroscópios de uma Unidade de Medição Inercial (IMU). Os encoders, as reduções e a ausência de folgas nas transmissões foram fatores preponderantes para que o robô tivesse a precisão adequada. O punho mostrou uma boa controlabilidade quando submetido a uma entrada em degrau. Para isso foram feitos ajustes de controle PID levando em consideração a velocidade de resposta e o erro em regime permanente, obtendo-se como resultado um robô com maior ultrapassagem percentual e tempo de assentamento elevado. Percebeu-se que a simulação do robô pode ser uma ferramenta de grande importância para o usuário pelo fato de permitir que os movimentos possam ser monitorados a distância, dispensando a presença direta com o robô. 8 Referências Bibliográficas [1] SANTOS, Winderson Eugenio. Sistema para identificação da curvatura na junta prismática de um robô via quaternions. 2003. 172f. Tese (Doutorado) – Curso de Pós-graduação em Engenharia Mecânica, Universidade Federal de Santa Catarina, Florianópolis, 2003. [2] LACTEC. Projeto Roboturb. Curitiba: Lactec, 2001. Desenhos Mecânicos. [3] NISE, Norman S. Engenharia de Sistemas de Controle. 3. ed. Rio de Janeiro: LTC Editora, 2002.
Baixar