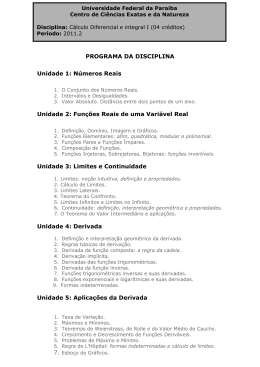
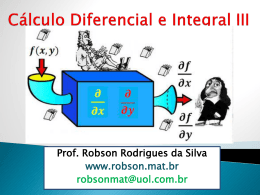
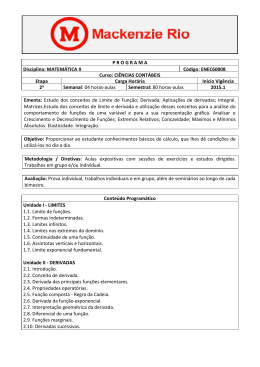
ISSN 2317-3297 Otimização Topológica Estrutural em Estado Plano de Deformações Renatha B. dos Santos, Antonio A. Novotny, LNCC - Laboratório Nacional de Computação Científica 25651-075, Petrópolis, RJ E-mail: [email protected], [email protected]. Palavras-chave: Derivada Topológica, Otimização Topológica, Múltiplos carregamentos, Estado Plano de Deformações Resumo: A derivada topológica mede a sensibilidade de um dado funcional com respeito a uma perturbação infinitessimal no domínio, como a inserção de furos, inclusões ou até mesmo termos fontes. A derivada topológica vem sendo utilizada com sucesso na obtenção de topologia ótima para uma grande classe de problemas da física e da engenharia. Neste trabalho utiliza-se a derivada topológica em um problema de otimização topológica estrutural em estado plano de deformação. Em particular, minimiza-se a flexibilidade da estrutura submetida a vários casos de carregamento considerando uma restrição no volume. Uma vez que lida-se com múltiplos casos de carregamento um problema de otimização multi-objetivo é proposto e a derivada topológica é obtida como uma soma para cada caso de carregamento. 1 Introdução Em Elasticidade Linear consideram-se dois tipos de problemas planos: problemas em estado plano de tensões e problemas em estado plano de deformações. Os problemas em estado plano de deformação caracterizam-se por estruturas nas quais a dimensão na direção z é muito maior que as dimensões no plano xy. As cargas são paralelas ao plano xy e não variam na direção z. Assume-se que os deslocamentos na direção z sejam restringidos. Desta forma, qualquer seção transversal (paralela ao plano xy) encontra-se submetida ao mesmo estado de deformação. Nesta seção é apresentado um modelo matemático para o cálculo da derivada topológica para um problema em elasticidade linear bidimensional em estado plano de deformação considerando a hipótese de pequenas deformações. Considere um domínio Ω ⊂ R2 . Introduz-se uma função característica χ = 1Ω associada ao domínio, tal que: ∫ |Ω| = χ, (1) R2 onde |Ω| é a medida de Lebesgue de Ω. Deseja-se calcular a derivada topológica do funcional energia potencial total ∫ ∫ 1 ψ(χ) := Jχ (u) = σ(u) · ∇s u − q·u . (2) 2 Ω ΓN O campo vetorial u representa o deslocamento de cada ponto do domínio e é solução do seguinte problema variacional: u ∈ U tal ∫que Achar ∫ (3) σ(u) · ∇s η = q · η, ∀η ∈ V, Ω ΓN 527 ISSN 2317-3297 com σ(u) = C∇s u. Aqui entende-se: σ(u) tensor de Cauchy de 2a ordem ou tensor tensão, ∇s u = 1 a T 2 (∇u + ∇ u) tensor de Green linearizado, também de 2 ordem, ou tensor das deformações e C tensor de Hooke generalizado (constitutivo) de quarta ordem dado por: C = 2µI + λI ⊗ I, (4) onde I e I são os tensores identidade de segunda e quarta ordem, respectivamente, µ e λ são os coeficientes de Lamé, ambos considerados constantes em todo domínio, o que caracteriza o caso isotrópico e homogêneo. Em estado plano de deformação: µ= νE E eλ= , 2(1 + ν) (1 + ν)(1 − 2ν) (5) onde E é o módulo de elasticidade de Young e ν é o coeficiente de Poisson. O conjunto U e o espaço V são definidos como: U := {φ ∈ H 1 (Ω; R2 ) : φ|ΓD = u}, (6) V := {φ ∈ H (Ω; R ) : φ|ΓD = 0}. (7) 1 2 2 Conceito de Derivada Topológica Considera-se agora que Ω é submetido a uma perturbação não suave confinada numa pequena região ωε (b x) = x b + εω de tamanho ε, com x b um ponto arbitrário do domínio e ω um domínio 2 fixo em R , como mostra a figura 1. Figura 1: Conceito de derivada topológica. Então, define-se também, uma função característica associada ao domínio topologicamente perturbado na forma, x b 7→ χε (b x). No caso de furo, por exemplo, χε (b x) = 1Ω − 1ωε(bx) , e o domínio x). Então, assume-se que, dado topologicamente perturbado é obtido na forma: Ωε (b x) = Ω \ ωε (b um funcional de forma ψ(χε (b x)) associado ao domínio topologicamente perturbado, admite-se a seguinte expansão assintótica topológica: ψ(χε (b x)) = ψ(χ) + f (ε)T (b x) + o(f (ε)), (8) onde ψ(χ) é o funcional de forma associado ao domínio original (não perturbado), f (ε) é uma função positiva tal que f (ε) → 0 quando ε → 0. A função x b 7→ T (b x) é chamada de derivada topológica de ψ no ponto x b. Reescrevendo (8) e tomando o limite quando ε → 0, obtem-se: ψ(χε (b x)) − ψ(χ) . ε→0 f (ε) T (b x) = lim (9) Neste trabalho, o domínio é topologicamente perturbado pela nucleação de uma pequena inclusão, ao invés de fazer furos. Mais precisamente, o domínio perturbado é obtido quando uma região Bε (b x) é inserida em Ω, onde Bε (b x) é usada para denotar a bola de raio ε e centro em x b ∈ Ω. Em seguida, essa região é preenchida por uma inclusão com propriedade material diferente da propriedade do meio. Em particular, χε (b x) = 1Ω − (1 − γ)1Bε (bx) , e γε é uma função constante por partes na forma: { 1, se x ∈ Ω \ Bε , γε = γε (x) := (10) γ, se x ∈ Bε , onde γ ∈ R+ é o contraste na propriedade material. 528 ISSN 2317-3297 Derivada Topológica 3 A expansão assintótica topológica do funcional energia é dada por [1]: ψ(χε (b x)) = ψ(χ) − πε2 Pγ σ(u(b x)) · ∇s u(b x) + o(ε2 ). onde o tensor de polarização Pγ é dado pelo seguinte tensor isotrópico de quarta ordem: ( ) 1 1−γ 1 1−γ Pγ = (1 + α2 )I + (α1 − α2 ) I⊗I , 2 1 + γα2 2 1 + γα1 (11) (12) com α1 = 1 e α2 = 3 − 4ν. 1 − 2ν (13) Tomando f (ε) = πε2 , tem-se a seguinte fórmula para a derivada topológica, T (b x) = −Pγ σ(u(b x)) · ∇s u(b x). 4 (14) Resultados Numéricos O problema de otimização que deseja-se resolver é: n Minimizar F (u ) = − ∑ J (u ), χ i Ω i i=1 sujeito à |Ω| ≤ |Ω∗ |, (15) onde n é o número de casos de carregamento. Utilizando o método da penalização linear para controle de volume, o problema de otimização (15), é reescrito como: min FΩβ (ui ) , Ω⊂R2 (16) onde FΩβ (ui ) = FΩ (ui ) + β|Ω|, (17) sendo β um multiplicador fixo que impõe a restrição na quantidade de material. Como o problema é linear, a derivada topológica associada ao funcional (17) é escrita como: T (b x) = n ∑ Ti (b x) − λ (18) i=1 onde, de (14): Ti (b x) = Pγ σ(ui (b x)) · ∇s ui (b x). (19) No exemplo aqui apresentado, o domínio Ω é discretizado por elementos finitos. Utiliza-se o algorítmo proposto por [2], que baseia-se em uma representação por função level-set para o domínio. Consideram-se dois casos: • caso 1: as cargas são aplicadas simultaneamente (único carregamento), • caso 2: as cargas são aplicadas separadamente (múltiplo carregamento). 529 ISSN 2317-3297 4.1 Exemplo A figura 2 representa o domínio inicial submetido a um carregamento distribuído na lateral e a três forças concentradas tal que q 1 = 2q e a intensidade de q = 0.1. Para o coeficiente de penalização foi tomado β = 3.0. O contraste na propriedade material γ = 10−4 . O módulo de Young E = 1 e o coeficiente de Poisson ν = 0.3. A malha inicial é uniforme com 400 elementos finitos. As topologias finais foram obtidas com 33 e 31 iterações para o caso 1 e caso 2 respectivamente. Veja figuras 3(a) e 3(b). Figura 2: Modelo (b) múltiplo carregamento (a) único carregamento Figura 3: Resultados 5 Conclusão Neste trabalho a derivada topológica foi utilizada no contexto de otimização topológica de estruturas em estado plano de deformação sujeitas a múltiplos casos de carregamento. A otimização topológica foi feita minimizando-se a flexibilidade da estrutura com restrição em volume. A derivada topológica foi encontrada como uma soma das derivadas topológicas para cada caso de carregamento, uma vez que o problema de otimização é multi-objetivo. Por fim foi apresentado um exemplo numérico de otimização estrutural mostrando o papel dos múltiplos carregamentos. Referências [1] Novotny, A.A., Sokołowski J., Topological Derivatives in Shape Optimization, Lectures Notes, Brazil-France (2012). [2] Amstutz S., Andra H., A new algorithm for topology optimization using a level-set method, Journal of Computational Physics, vol. 216(2), pp. 573-588 (2006) 530
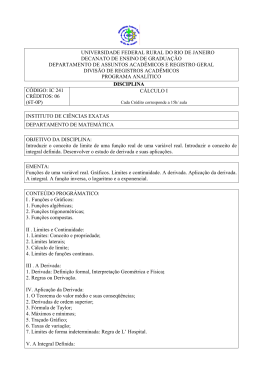
Download