☰
Explorar
Assinar em
Inscrever-se
Envio
×
Baixar
Sem categoria
Decomposed fuzzy proporcional-integral
Aula_16_2014_02
Apresentação
Aula_15_2014_02
aula_teorica_7
Apresentação
Controle Adaptativo - DCA
Slide 1 - Triforce Automações
slides ppt
Ilha das bermudas
Controladores PID - Leonardo Gonsioroski
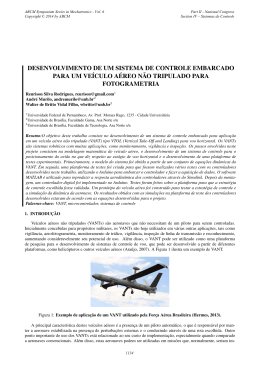
desenvolvimento de um sistema de controle embarcado