Análise de Sinais
(Notas em Sinais e Sistemas)
J. A. M. Felippe de Souza
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Análise de Sinais
(Notas em Sinais e Sistemas)
J. A. M. Felippe de Souza
1 - Sinais contínuos e discretos
3
2 - Energia e Potência de Sinais
10
3 - Transformações da variável independente
14
4 - Sinais Periódicos
18
5 - Sinais pares e ímpares
19
6 - Sinais exponenciais e sinusoidais
22
O sinal sinusoidal contínuo
O sinal exponencial contínuo
O sinal sinusoidal discreto
O sinal exponencial discreto
7 - Funções singulares discretas
O sinal impulso unitário discreto
O sinal degrau unitário discreto
O sinal rampa unitária discreta
8 - Funções singulares contínuas
O sinal impulso unitário
O sinal degrau unitário
O sinal rampa unitária
9 - Sistemas
22
26
30
31
39
39
39
40
43
43
44
45
48
Introdução
48
Classificações de Sistemas
Sistemas Lineares e Invariantes no Tempo (SLIT)
Propriedades da Convolução
SLIT sem memória
SLIT inversíveis
Outros assuntos tratados em Teoria de Sistemas
50
58
59
62
63
65
2
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Sinais e Sistemas
A noção intuitiva de sinais e de sistemas surgem de uma variedade enorme de
contextos.
Existe uma linguagem própria usada para descrever sinais e sistemas e um conjunto bastante poderoso de ferramentas para analisá-los.
1 - Sinais contínuos e discretos
Sinais podem descrever uma grande variedade de fenómenos físicos.
Sinais podem ser descritos de muitas maneiras.
Alguns exemplos de sinais:
Circuito RC
O sinal da tensão vs(t) na fonte e o sinal e da tensão vc(t) no condensador.
3
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Carro
O sinal f(t) da força aplicada ao carro (que é proporcional à aceleração), o sinal
x(t) do deslocamento do carro e o sinal v(t) da velocidade do carro.
Outros exemplos de sinais:
O mecanismo vocal humano produz fala criando flutuações na pressão acústica.
Uma transmissão de rádio é também composta de sinais eléctricos que
transportam o som (voz, música, etc.)
4
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Voz / fala humana
Ilustração da gravação do sinal de voz, obtido com o uso de um microfone que capta as
variações da pressão acústica, a qual é convertida em sinais eléctricos.
Rádio (AM & FM)
A portadora (sinal de frequência mais alta) transporta o som (sinal modulado) seja modulado em amplitude (AM) ou em frequência (FM).
5
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Electrocardiograma (ECG)
6
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Electroencefalograma (EEG)
7
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Esta variável independente muito comummente é o tempo (sistemas dinâmicos), mas não
necessariamente.
O tempo é a variável independente no caso dos exemplos acima do circuito RC, do carro,
das emissões de rádio, do ECG e do EEG.
Por outro lado, uma imagem monocromática (preto-e-branco) é constituída por um padrão
de variações no brilho através dela. Ou seja, o sinal da imagem é uma função da intensidade de brilho em todos os pontos da imagem (bidimensional).
Portanto, sinais são representados matematicamente como funções de uma ou mais
variáveis independentes.
No caso de mais de uma variável independente, muito comummente o tempo é uma destas variáveis (são sistemas físicos dinâmicos). Mas não necessariamente, como é o caso
da imagem monocromática acima, em que o sistema é estático.
Outros exemplos de sistemas não dinâmicos:
em geofísica: sinais que representam variações de quantidades físicas como densidade, porosidade e resistividade eléctrica versus a profundidade são usados para estudar a estrutura da terra.
em meteorologia: variação da pressão atmosférica, temperatura e velocidade do
vento versus a altitude.
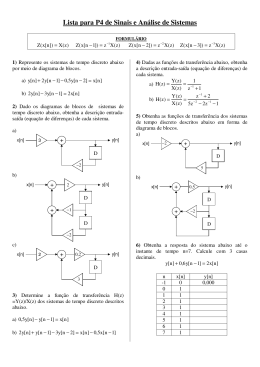
O sinal ao lado
mostra a
velocidade do vento
x
altitude,
usado para examinar as condições
de vento que possam afectar uma
aeronave durante a
aproximação final
da pista e aterragem.
8
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Todos os exemplos acima são de variáveis independentes contínuas, e por isso chamados de “sinais contínuos”.
Entretanto se considerarmos por exemplo: o índice da bolsa de valores (diário), temos
então um caso de sinal discreto (i.e., sinal não contínuo).
Outros exemplos de sinais discretos podem ser encontrados por exemplo em estudos
demográficos. Vários atributos como:
renda média familiar (pelo número de pessoas na família);
taxas de crimes (pela população total);
quilos de peixes que foram pescados (pelo tipo de embarcação);
Ou em índices económicos (que normalmente só saem uma vez por mês) como:
inflação (mensal);
taxa de desemprego (mensal);
Para distinguir os sinais contínuos e discretos no tempo nós usaremos
“t” para denotar a variável independente contínua e
“n” para denotar a variável independente discreta.
Além disso, nos sinais contínuos usaremos parêntesis ( ),
x(t), y(t), v(t), etc.
enquanto que nos sinais discretos usaremos parêntesis recto [ ],
x[n], y[n], v[n], etc.
Um sinal discreto pode ser a representação de um fenómeno (sistema) inerentemente discreto, como por exemplo o caso de índices demográficos ou os índices
da bolsa de valores.
9
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Por outro lado há também sinais discretos no tempo que são oriundos da amostragem de sinais contínuos.
A razão disto é o uso de computadores digitais modernos com processadores digitais velozes, potentes e flexíveis para representar sistemas físicos de aplicação
prática como por exemplo:
piloto automático digital;
sistemas digitais de áudio ou de vídeo.
Estes sistemas requerem o uso de sequências discretas no tempo que são representações (discretizações) de sinais contínuos no tempo.
Assim, sinais que são naturalmente contínuos no tempo são tornados sinais discretos (por amostragem) para este propósito, como por exemplo:
a posição da aeronave;
a velocidade da aeronave;
a direcção da aeronave;
(no caso do piloto automático digital), ou
voz;
música;
som em geral;
(no caso de sistemas digitais de áudio), ou
fotografias que aparecem nos jornais e livros;
imagens de um filme gravado em DVD;
etc.
2 - Energia e Potência de Sinais
Em muitas aplicações, embora não em todas, os sinais são directamente relacionados com quantidades físicas que captam ou absorvem energia e potência no
sistema físico.
Por exemplo, no caso do circuito RC que foi visto acima, a potência instantânea é:
p( t ) = v( t ) i ( t ) =
1 2
v (t)
R
onde:
v(t) = tensão na resistência R;
i(t) = corrente na resistência R.
10
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
e a energia total despendida no intervalo de tempo t 1 ≤ t ≤ t 2 é:
E Total =
∫
t2
t1
∫
p( t )dt =
t2
t1
1 2
v ( t )dt
R
e a potência média neste intervalo [t1, t2] é:
Pmédia =
1
t2
(t 2 − t 1 ) ∫t
p( t )dt =
1
1
t2
(t 2 − t 1 ) ∫t
1
1 2
v ( t )dt
R
De forma semelhante no caso do exemplo acima do carro, a potência dissipada
pela fricção é:
p( t ) = ρ v 2 ( t )
onde ρ = coeficiente de atrito da superfície.
A energia total e potência média no intervalo [t1, t2] são respectivamente:
E Total =
Pmédia =
1
∫
t2
t1
(t 2 − t1 ) ∫
t2
t1
p( t )dt =
∫
p( t )dt =
t2
t1
ρv 2 ( t )dt
1
(t 2 − t1 ) ∫
t2
t1
ρv 2 ( t )dt
Motivados pelos exemplos acima definiremos abaixo potência e energia para
qualquer sinal contínuo x(t) e qualquer sinal discreto x[n].
A energia total no intervalo t 1 ≤ t ≤ t 2 de um sinal contínuo x(t) é definida como:
E =
∫
t2
x( t )
t1
2
dt
onde |x| é o módulo do número x (que pode ser real ou complexo).
A potência média neste intervalo [t1 , t2] é definida como:
P =
1
t2
(t 2 − t1 ) ∫t
11
1
x( t )
2
dt
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
A energia total e a potência média no intervalo t 1 ≤ t ≤ t 2 de um sinal discreto
x[n] é definida como:
n2
∑ x[n]
E =
2
n =n1
n2
x[n]
(n −n +1) ∑
1
P =
2
2
n =n1
1
Para o caso de um intervalo infinito de tempo:
-∞<t<∞
-∞<n<∞
ou
as definições de energia total e potência média, no caso de um sinal contínuo no
tempo, ficam:
E ∞ = lim
T →∞
∫
T
∫
2
x( t ) dt =
−T
P∞ = lim
T →∞
1
2T
∫
T
−T
∞
x( t )
−∞
x( t )
2
2
dt
dt
e, para um sinal discreto no tempo, ficam:
N
∑ x[n]
E ∞ = lim
N→ ∞
P∞ =
2
=
n = −N
lim
N→ ∞
∞
∑ x[n]
2
n = −∞
N
(2N + 1) n∑
= −N
1
x[n]
2
Note que para alguns sinais E∞ e/ou P∞ podem não convergir. Por exemplo, se x(t)
ou x[n] = constante ≠ 0 para todo t, então este sinal tem energia infinita (E∞ = ∞).
Se um sinal tem energia E∞ < ∞ (energia total finita), então:
P∞ = 0
Isto porque
E∞
= 0
2T
P∞ = lim
T →∞
ou
P∞ =
lim
N→∞
E∞
(2N + 1)
12
= 0.
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Exemplo 1:
Facilmente observa-se
que para este sinal x(t):
E∞ = 1.
E portanto,
P∞ = 0.
Se um sinal tem 0 < P∞ < ∞ (potência finita ≠ 0), então, obviamente:
E∞ = ∞.
Exemplo 2:
Facilmente observa-se
que para este sinal x[n]:
E∞ = ∞.
E portanto,
P∞ = 16.
Finalmente, existem sinais que têm E∞ = ∞ e P∞ = ∞.
Exemplo 3:
Facilmente observa-se
que para este sinal x(t)
ambos
E∞ = ∞.
P∞ = ∞.
13
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
3 - Transformações da variável independente
Translação no tempo (“time shifting”):
A translação no tempo, “time shifting” também é chamado de “deslocamento no tempo”
ou “deslizamento no tempo” ou simplesmente “shift”.
Shift para direita (retardo):
sinal discreto:
x[n]
--------→
x[n-no], no > 0.
sinal contínuo :
x(t)
--------→
x(t – to), to > 0.
Shift para esquerda (avanço):
sinal discreto:
x[n]
--------→
x[n+no] , no > 0.
14
J. A. M. Felippe de Souza
sinal contínuo :
Notas em Sinais e Sistemas
x(t)
--------→
x(t + to), to > 0.
Aplicações de sinais com “shift” para direita são encontradas em radar, sonar e sismógrafos.
Sinal reflectido / reversão no tempo (“time reversal”) em torno de t = 0:
sinal discreto:
x[n]
--------→
x[- n]
sinal contínuo:
x(t)
--------→
x(- t)
15
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Aplicações de sinais com reversão no tempo podem ser encontradas em gravações tocadas de trás para frente.
Escalonamento no tempo (time scaling)
Compressão ou encolhimento:
sinal discreto:
x[n]
--------→
x[an] , a > 0.
sinal contínuo:
x(t)
--------→
x(at), a > 0.
Expansão ou esticamento:
sinal discreto:
x[n]
--------→
x[an] , 0 < a < 1.
sinal contínuo:
x(t)
--------→
x(at), 0 < a < 1.
16
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Aplicações de sinais com “time scaling” para direita são encontradas em gravações tocadas mais rapidamente (“fast forward”) ou mais lentamente (replay em ‘slow motion’).
Caso geral
sinal discreto:
x[n]
--------→
x[αn + β] , a > 0
sinal contínuo:
x(t)
--------→
x(αt + β), a > 0
Se | α | < 1 → sinal é esticado (↔);
Se | α | > 1 → sinal é comprimido (→ ←);
Se α < 0 → sinal é invertido;
Se β < 0 → translação (shift) para direita;
Se β > 0 → translação (shift) para esquerda.
Exemplo 4:
17
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
4 - Sinais Periódicos
Um sinal contínuo é periódico se ∃ T > 0 tal que
x(t) = x(t + T) , ∀ t
eq. (A)
T é chamado de período de x(t).
Ou seja, um sinal periódico x(t) fica imutável se fizermos uma translação (shift) de T.
Exemplo 5:
Se um sinal é periódico de período T então também é periódico de período 2T, 3 T, 4T, …
O período fundamental de x(t), To , é o menor valor positivo de T para o qual a eq. (A)
acima é válida.
Esta definição tem uma excepção que é o caso de
x(t) = C (constante) , ∀ t
Neste caso não existe período fundamental.
Um sinal não periódico é chamado de “aperiódico”.
Analogamente um sinal discreto x[n] é periódico se ∃ N tal que
x[n] = C (constante) , ∀ n
eq. (B)
N é chamado de período de x[n].
O período fundamental de x[n], No , é o menor valor de N para o qual eq. (B) é válida.
Exemplo 6:
É fácil de verificar que To = (2π/a) é o período fundamental do sinal periódico:
x1(t) = b ⋅ cos (at + c)
e que To = (π/a) é período fundamental do sinal periódico:
x2(t) = b ⋅ | cos (at) |
18
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Exemplo 7:
Sinal discreto com período fundamental No = 3.
5 - Sinais pares e ímpares
Um sinal contínuo x(t) é par se:
x(-t) = x(t)
Um sinal discreto x[n] é par se:
x[-n] = x[n]
Um sinal contínuo x(t) é ímpar se:
x(-t) = - x(t)
Um sinal discreto x[n] é ímpar se:
x[-n] = - x[n]
Exemplo 8:
um sinal par
um sinal ímpar
19
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Note que para um sinal ímpar x(t) ou x[n],
x(0) = 0
ou
x[n] = 0,
respectivamente.
Exemplo 9:
x(t) = sen (t) é um sinal ímpar; e
x(t) = cos (t) é um sinal par.
Um sinal pode ser decomposto na soma de 2 sinais sendo um par e um ímpar.
No caso de um sinal contínuo:
x(t) = Ev{ x(t) } + Od{ x( t ) }
onde:
Ev{ x(t) } =
1
( x( t ) + x( −t ) )
2
(sinal par)
Od{ x(t) } =
1
( x( t ) − x( −t ) )
2
(sinal ímpar)
No caso de um sinal discreto:
x[n] = Ev{ x[n] } + Od{ x[n] }
onde:
Ev{ x[n] } =
1
( x[n] + x[− n] )
2
(sinal par)
Od{ x[n] } =
1
( x[n] − x[− n] )
2
(sinal ímpar)
Exemplo 10:
O sinal x[n] da figura acima (que é chamado de degrau unitário, como veremos mais
adiante) pode ser decomposto nos dois sinais Ev{x[n]} e Od{[n]} abaixo:
⎧− 1 , se n < 0
⎪ 2
⎪
Od{ x[n] } = ⎨ 1, se n = 0
⎪
⎪⎩ 1 2 , se n > 0
⎧ 1 , se n < 0
⎪ 2
⎪
Ev{ x[n] } = ⎨ 1, se n = 0
⎪
⎪⎩ 1 2 , se n > 0
20
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
que estão representados a seguir.
21
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
6 - Sinais exponenciais e sinusoidais
O sinal sinusoidal contínuo:
Este sinal descreve as características de muitos processos físicos, em particular: sistemas
no qual a energia é conservada, como os circuitos LC; o movimento harmónico simples
(MHS); a variação da pressão acústica que corresponde ao tom de uma nota musical; etc.
O sinal acima x(t) = A cos(ωot + φ), ωo = 0 é periódico com período fundamental
To =
2π
.
ωo
e ωo é chamada de frequência fundamental.
A equação acima mostra que frequência fundamental e o período fundamental são inversamente proporcionais.
Se tivermos 3 sinais:
xo(t) = A cos(ωot + φ),
x1(t) = A cos(ω1t + φ), e
x2(t) = A cos(ω2t + φ),
com ω2 < ωo <ω1 (o que equivale a T1 < To < T2) então x1(t) oscila mais que xo(t) e por
outro lado x2(t) oscila menos que xo(t).
22
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Ou seja, para o sinal xo(t) = A cos(ωot + φ), quanto maior a frequência ωo, mais ele oscila,
e quanto menor frequência ωo, menos ele oscila.
23
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
As unidades de x(t) = A cos(ωo t + φ) são:
T [segundos]
φ [radianos]
ωo [radianos / segundo]
Às vezes a frequência natural ωo é escrita como
ωo = 2πfo
onde
fo [Hertz]
é a frequência do sinal x(t) = A cos(2πfot + φ).
Note também (os casos particulares), para
x( t ) = A ⋅ cos (ωo t + φ)
se
φ = 0,
ou
se
φ=
π
,
2
ou
se
π
φ=− ,
2
ou
se
φ=
3π
,
2
ou
φ = ±2π, ±4π, …
⇒
x(t) = A cos (ωot)
φ=
π
± 2π,
2
π
± 4π, ...
2
⇒
x(t) = - A sen (ωot)
φ=−
π
± 2π,
2
−
π
± 4π, ...
2
⇒
x(t) = A sen (ωot)
3π
± 4π, ...
2
⇒
x(t) = - A cos (ωot)
φ=
3π
± 2π,
2
φ=
24
J. A. M. Felippe de Souza
Além disso:
Notas em Sinais e Sistemas
se
ωo = 0
==>
x(t) = C (constante)
O sinal x(t) = C (constante), ∀t é também um sinal periódico, e com período T para qualquer T > 0. Entretanto sinal x(t) = C (constante) não tem um período fundamental To.
Outro detalhe: o sinal x(t) escrito na forma combinação linear de um seno e um coseno
com a mesma frequência ωot e sem desfasagem, isto é, x( t ) = α ⋅ sen (ωo t ) + β ⋅ cos (ωo t ) ,
pode ser escrito como um seno com a mesma frequência ωot e desfasagem φ, isto é,
x( t ) = A ⋅ sen (ωo t + φ) ; e vice-versa. Ou seja:
x( t ) = α ⋅ sen (ωo t ) + β ⋅ cos (ωo t )
= A ⋅ sen (ωo t + φ)
onde:
α = A ⋅ cos φ
e
A = α 2 + β2
e
β = A ⋅ sen φ
⎛β⎞
φ = tg −1 ⎜ ⎟
⎝α⎠
Por outro lado, o sinal x(t) que vimos mais acima, na forma de um coseno de frequência
ωot e desfasagem φ, isto é, x( t ) = A ⋅ cos (ωo t + φ) , pode ser escrito na forma de combinação linear de um seno e um coseno com a mesma frequência ωot (e vice-versa) da
seguinte forma:
x( t ) = A ⋅ cos (ωo t + φ)
= α ⋅ cos (ωo t ) − β ⋅ sen (ωo t )
onde α, β, A e φ são dados acima.
25
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
O sinal exponencial contínuo:
x( t ) = C e at
Caso 1:
Neste caso x(t) é chamado de um sinal exponencial real e pode ser crescente (se a > 0)
ou decrescente (se a < 0).
A exponencial crescente é usada na descrição de muitos fenómenos físicos como a reacção em cadeia em explosões atómicas e certas reacções químicas complexas.
A exponencial decrescente também aparece na descrição de muitos processos físicos
como por exemplo: o decaimento radioactivo, a resposta vc(t) do circuito RC e sistemas
mecânicos amortecidos.
Obviamente se a = 0, então novamente x(t) = C eat = C = constante (já vista acima nos
sinais sinusoidais com frequência ωo = 0) e portanto x(t) deixa de ser um sinal exponencial.
26
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Caso 2: C = 1 e a é um número imaginário puro
x( t ) = C e at
para C = 1 e a = j ωo (imaginário puro)
x( t ) = e jωo t
Neste caso x(t) é um sinal exponencial complexo para cada t.
Observe que como
e jθ = 1, ∀θ , então:
| x(t) | = 1 , ∀t
Podemos
interpretar
este sinal x(t) como um
ponto que se desloca
na circunferência de
raio 1 no plano complexo com velocidade
angular | ωo | rad/s.
Note que este sinal
x( t ) = e jωot
é sempre periódico pois:
x ( t + T ) = e j ωo ( t + T ) = e j ωo t e j ωo T =
= x( t )
para muitos valores de T (período) para os quais e
De facto, se
T=
então e
j ωo T
2kπ
,
ωo
j ωo T
= 1.
k = ±1, ± 2, ... ,
= 1 e T é um período de x(t). No caso particular de
To =
2π
,
ωo
ωo ≠ 0
então To é o período fundamental de x(t) e ωo é chamada de frequência fundamental de
x(t).
27
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
A família de sinais exponenciais complexos
φk ( t ) = e jkωot
,
k = 0, ± 1, ± 2,...
é conhecida como sinais harmonicamente relacionados. Estes sinais são periódicos e a
frequência fundamental de cada φ k ( t ) , k ≠ 0, é
ωok = k ⋅ ωo
e o período fundamental é
Tok =
T
2π
= o
k ⋅ ωo
k
No caso de k = 0, φ o ( t ) = constante e não tem frequência fundamental nem período
fundamental.
O termo “harmónico” advém da música e se refere às tons resultantes de variações da
pressão acústica em frequências que são múltiplas da frequência fundamental.
Por exemplo, o padrão de vibração de uma corda de um instrumento musical (como o violino) pode ser descrito como a sobreposição (ou a média ponderada) de sinais exponenciais periódicos harmonicamente relacionados.
Exemplo 11:
x( t ) = e j 2 t + e j 5 t
= e 3,5 t (e − j1,5 t + e j1,5 )
= 2e 3,5 t cos(1,5t )
E, como e jθ = 1 , ∀θ, temos que
x( t ) = 2⋅ cos(1,5t )
que é o sinal sinusoidal de onda completa rectificado, que vemos no gráfico abaixo:
28
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Caso 3:
Se
C = |C| ejθ
a = σ + jωo
(C escrito na forma polar)
(a escrito na forma cartesiana)
então o sinal exponencial contínuo
x(t) = C e αt
= C e jθ e ( σ+ jωo )t
= C e σt e ( jωo + θ )t
= C e σt cos(ωo t + θ) + j C e σt sen(ωo t + θ)
Logo:
Re{ x(t) } e Im{ x(t) }
σ=0
⇒
Sinais sinusoidais
σ>0
⇒
Sinais sinusoidais multiplicados por exponenciais crescentes
σ<0
⇒
Sinais sinusoidais multiplicados por exponenciais decrescentes
29
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Estes últimos são sinais com decaimentos (σ < 0) e comummente chamados de sinais
sinusoidais amortecidos.
Exemplos de sistemas físicos onde aparecem estes sinais são: Circuitos RLC; sistemas
mecânicos com amortecimento e força restauradora (massa-mola, suspensão de automóveis, etc.). Estes sistemas têm mecanismos que dissipam energia (como resistências, forças amortecedoras e atritos) com oscilações que decaem no tempo.
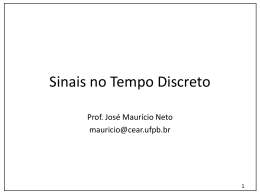
O sinal sinusoidal discreto:
x[n] = A cos (ωon + φ)
onde as unidades de x[n] são:
n [sem dimensão]
ωo [radianos]
φ [radianos]
Abaixo vemos alguns exemplos de sinais sinusoidais discretos.
x[n] = A cos (ωon), para ωo = 0,2π.
x[n] = A cos (ωon), para ωo = 0,3π.
30
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
x[n] = A cos (ωon), para ωo = 0,15.
Usando as equações de Euler, o sinal sinusoidal discreto x[n] acima pode ser escrito
como:
x[n] = A cos (ωo + φ ) =
=
jφ
e, como e
2
= 1 e e jω n
o
2
A jφ jωon A − jφ − jωon
⋅e ⋅e
+ ⋅e ⋅e
2
2
= 1 , então, para este sinal temos que a energia total E∞ e
a potência total P∞ são:
E∞ = ∞,
P∞ = 1.
e
O sinal exponencial discreto:
x[n] = C α n
=Ce
βn
,
onde
α = eβ .
Que é uma forma análoga ao sinal exponencial contínuo.
Caso 1:
Neste caso x[n] pode ser um sinal crescente (se | α | > 1) ou um sinal decrescente (se
| α | < 1).
n
Abaixo vemos os gráficos deste sinal x[n] = C α para α > 1, 0 < α < 1, -1 < α < 0
α < -1.
e
Estes sinais são frequentemente usados para descrever crescimento populacional em
função das gerações e também o retorno de investimentos em função do dia, mês ou
trimestre.
31
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
α>1
0<α<1
-1 < α < 0
α<-1
Obviamente se α = 0 ou α = ±1, então x[n] = C α n não é um sinal exponencial, mas sim
um sinal constante de zero ou ± |C| , respectivamente. Ou seja:
Se α = 0, então ⇒ x[n] = C α n = 0 ,
se α = 1 e C > 0 ou se α = -1 e C < 0, então ⇒ x[n] = C α n = | C | ,
e
se α = -1 e C > 0
ou
se α = 1 e C < 0, então ⇒ x[n] = C α n = -| C |.
32
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Caso 2: C = 1 e β é um número imaginário puro (isto é, | α | = 1)
O sinal exponencial complexo
x[n] = C e βn = C α n
(α = e )
β
para C = 1 e β = j ωo (imaginário puro), ou seja | α | = 1, fica:
x[n] = e jωon .
Usando a equação de Euler temos que:
x[n] = e j ωon = cos ωon + j ⋅ sen ωon
Observe que, como e j ωon
2
= 1, ∀n então para este sinal temos novamente que
E∞ = ∞,
P∞ = 1.
e
Note que o sinal exponencial
x[n] = e j ωon
satisfaz a seguinte propriedade:
x[n] = e j ωon = e j ( ωo +2 π )n =
= e j ( ωo ±mπ )n ,
m = 0, ± 1, ± 2, ...
ou seja, o sinal x[n] é o mesmo para frequência ωo e (ωo + 2π). Na verdade é o mesmo
para qualquer frequência (ωo ± mπ), m = 0, ±1, ±2, … Isto é, ele se repete a cada 2π a
medida que a frequência ωo varia.
33
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Esta situação é diferente do seu sinal análogo contínuo x(t), onde para cada ωo, x(t) era
um sinal diferente. Nunca se repetia para valores diferentes de ωo. Na verdade, quanto
maior era a frequência ωo, Maior era a taxa de oscilação de x(t).
No caso discreto que analisamos aqui
x[n] = e j ωon
o que ocorre é que conforme ωo aumenta de 0 até π, obtemos sinais x[n] que oscilam
cada vez mais rápido. Depois, continuando a aumentar ωo de π até 2π, os sinais x[n] vão
oscilando cada vez menos até voltar a ser o mesmo que era em ωo = 0 para ωo = 2π.
As figuras abaixo dão uma ideia de como isto ocorre. Elas mostram a evolução d a parte
real de x[n], ou seja
σ[n] = Re{ x[n]} = cos (ωon),
desde 0 (nenhuma oscilação) até π (número máximo de oscilações) e depois continuando
até 2π (nenhuma oscilação novamente).
34
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Se ωo = π, ou ωo = ±nπ para ímpar, a oscilação é máxima pois
x[n] = e j ωon = e j πn
para n ímpar
= (e j π )n = ( −1)n .
ou seja, o sinal x[n] salta de +1 para -1 a cada ponto n no tempo.
35
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Por outro lado se ωo = 0, ou ωo = ±nπ para m par, não há oscilação pois
x[n] = e j ωon = e j 0 = 1,
∀n
ou seja, o sinal x[n] é constante para todos os valores n no tempo.
Portanto, as oscilações baixas (ou variações lentas) do sinal x[n] tem valores ωo próximo a
0, 2π, etc. (múltiplos pares de π), enquanto que as oscilações altas (ou variações rápidas)
do sinal x[n] estão localizadas próximas a ±π e múltiplos ímpares de π.
Outra propriedade importante é a “periodicidade”. Esta situação aqui em x[n] também é
diferente que no seu análogo contínuo x(t). Enquanto que o sinal x(t) é sempre periódico,
para o sinal x[n] isto não ocorre sempre.
Note que a equação
x[n + N] = e j ωo (n+N) = e j ωon ⋅ e j ωoN = e j ωon = x[n]
só é válida quando e j ωoN = 1 , ou seja, se
ωoN = 2πm ,
m = 0, ± 1, ± 2,...
isto é, se
ωo m
= ,
2π N
m = 0, ± 1, ± 2,...
o que equivale a dizer
ωo
2π
Logo, o sinal discreto
x[n] = e j ωon
ωo
é um número racional.
2π
Nos sinais ilustrados na figura da páginas 29 e 30,
só é periódico quando
x[n] = A cos (ωon), para ωo = 0,2π ,
x[n] = A cos (ωon), para ωo = 0,3π , e
x[n] = A cos (ωon), para ωo = 0,15.
somente os 2 primeiros são periódicos pois têm frequências múltiplas de π por um
números racionais. O terceiro sinal não é periódico.
Portanto, se
ωo
2π
, então qualquer N que satisfaz
36
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
⎛ 2π ⎞
⎟⎟,
N = m ⋅ ⎜⎜
⎝ ωo ⎠
m = 0, ± 1, ± 2,...
é um período de x[n].
Na verdade, se ωo ≠ 0, e se N e m forem primos entre si (não têm factores comuns),
sendo N > 0, então o período fundamental é
No = N ,
ou seja,
⎛ 2π ⎞
⎟⎟ .
No = m ⋅ ⎜⎜
ω
⎝ o⎠
Resumindo o Caso 2 para os sinais contínuos e discretos:
x( t ) = e at
x[n] = e j ωon
x(t) ≠ para valores de ωo ≠
x[n] se repete para
ωo, (ωo + 2π), (ωo + 4π), etc
⎛ 2πm ⎞
x[n] só é periódico se ωo = ⎜
⎟
⎝ N ⎠
x(t) é periódico ∀ ωo
Para algum inteiro N > 0 e m inteiro.
(m e N primos entre si)
frequência fundamental de x[n]
ωo
m
frequência fundamental de x(t)
ωo
(m e N primos entre si)
período fundamental de x(t)
se ωo = 0 ⇒
período fundamental de x[n]
não existe!
se ωo ≠ 0 ⇒ To =
se ωo = 0 ⇒
2π
ωo
não existe!
⎛ 2π ⎞
⎟⎟
se ωo ≠ 0 ⇒ No = m ⋅ ⎜⎜
⎝ ωo ⎠
37
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Caso 3:
Se
C = |C| ejθ
α = |C| ejωo
(C escrito na forma polar)
(α escrito na forma polar)
então o sinal exponencial contínuo
x[n] = C αn
= C ⋅ cos(ωon + θ) + j ⋅ C ⋅ sin(ωon + θ)
Logo,
Re{ x[n] } e Im{ x[n] }
|α|=1
⇒
Sinais sinusoidais discretos
|α|>1
⇒
Sinais sinusoidais multiplicados por exponenciais crescentes
|α|<1
⇒
Sinais sinusoidais multiplicados por exponenciais decrescentes
σ[n] = Re{x[n]} = α ⋅ cos(ωon + θ) ,
n
α <1
38
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
7 - Funções singulares discretas
O sinal impulso unitário discreto (unit impulse):
uo[n]
⎧⎪0 ,
u o [n] = ⎨
⎪⎩1,
δ[n]
ou
n≠0
n=0
Se multiplicarmos o impulso unitário uo[n] por uma constante C ≠ 0 obtemos um impulso
(neste caso não unitário) de área C, podendo até mesmo ser negativa.
O sinal degrau unitário discreto (unit step):
u1[n]
u[n]
ou
⎧⎪0 ,
u1 [n] = ⎨
⎪⎩1,
39
n<0
n≥0
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Se multiplicarmos o degrau unitário u1[n] por uma constante C ≠ 0 obtemos um degrau
(neste caso não unitário) de amplitude C, podendo até mesmo ser negativa.
Equações que relacionam o degrau unitário u1[n] com o impulso unitário uo[n]:
uo[n] = u1[n] – u1[n-1] , ∀n
u1 [n] =
n
∑ u [n],
o
∀n
m = −∞
O sinal rampa unitária discreta (unit ramp):
u2[n]
⎧⎪0 ,
u 2 [n] = ⎨
⎪⎩n ,
n<0
n≥0
40
eq. (C)
eq. (D)
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Se multiplicarmos a rampa unitária u2[n] por uma constante C ≠ 0 obtemos uma rampa
(neste caso não unitária) de declive (ou inclinação) C, podendo até mesmo ser negativa.
Note que
u2[n] = n u1[n] ] , ∀n
ou também, na forma da eq. (D):
u 2 [n] =
n
∑ u [n],
m = −∞
1
∀n
Por outro lado, na forma da eq. (C),
u1[n] = u2[n] – u2[n-1] , ∀n
41
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Exemplo 12:
Alguns sinais do tipo degrau, impulso e rampa transformados:
42
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
8 - Funções singulares contínuas
O sinal impulso unitário (unit impulse):
Também chamado de função delta ou delta de Dirac.
uo(t)
δ(t)
ou
u o (t ) = 0 ,
∫
β
α
u o (t ) dt = 1,
t≠0
α<0<β
O impulso unitário uo(t) pode ser interpretado como o limite de uma sequência de pulsos
de área 1.
{x n ( t )}
→
uo (t )
Note que os sinais xn(t) (pulsos) acima são cada vez mais magros e mais altos, a medida
que n cresce, mas entretanto, eles têm todos área 1 sob a curva.
Desta forma é fácil de compreender que o impulso unitário uo(t), sendo o limite desta
sequência de pulsos {x n ( t )}, vai a infinito em t = 0 e a área(i.e., a integral sob a curva) no
intervalo [ α , β ] (para α < 0 < β) é 1.
43
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Propriedades do impulso unitário:
uo(t – a) = 0, para t ≠ a
∫
∫
β
α
β
α
u o (t − a ) dt = 1,
α<a<β
f (t ) ⋅ u o (t − a ) dt = f (a ),
α<a<β
Esta última igualdade é chamada de integral de convolução entre os sinais f(t) e uo(t).
Se multiplicarmos o impulso unitário uo(t) por uma constante C ≠ 0 obtemos um impulso
(neste caso não unitário) de área C, podendo até mesmo ser negativa.
O sinal degrau unitário (unit step):
u1(t)
u(t)
ou
⎧⎪0 ,
uo (t ) = ⎨
⎪⎩1,
44
t<0
t≥0
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Se multiplicarmos o degrau unitário u1(t) por uma constante C ≠ 0 obtemos um degrau
(neste caso não unitário) de amplitude C, podendo até mesmo ser negativa.
O degrau unitário é a integral do impulso unitário, e o impulso unitário por sua vez é a
derivada do degrau unitário, ou seja:
t
u1 (t ) = ∫ −∞ uo (t ) dt
uo (t ) =
du1 ( t )
dt
O sinal rampa unitária (unit ramp):
u2(t)
⎧⎪0 ,
u2 (t) = ⎨
⎪⎩ t ,
45
t<0
t≥0
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Se multiplicarmos a rampa unitária u2(t) por uma constante C ≠ 0 obtemos uma rampa
(neste caso não unitário) de declive (ou inclinação) C, podendo até mesmo ser negativo.
A rampa unitária é a integral do degrau unitário, e a integral dupla do impulso unitário. Por
outro lado, o degrau unitário é a derivada da rampa unitária, e o impulso unitário é a
derivada segunda da rampa. Ou seja:
d2u 2 ( t )
u0 ( t ) =
dt 2
du 2 ( t )
u1 ( t ) =
dt
t
t
u2 (t ) = ∫ −∞ ∫ −∞ u0 (t ) dt
t
u2 (t ) = ∫ −∞ u1 (t ) dt
Exemplo 13:
Alguns sinais do tipo degrau, impulso e rampa transformados:
46
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
47
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
9 - Sistemas
Introdução:
A noção de sistemas é intuitiva. Quase tudo que nos rodeia é algum tipo de sistema. Um
circuito eléctrico, ou um circuito electrónico (como os das figuras abaixo) são exemplos de
sistemas.
Um simples mecanismo, ou um mecanismo mais complexo (como os das figuras abaixo)
são também exemplos de sistemas.
Um automóvel, um robot ou um avião são outros exemplos de sistema. São sistemas
mais complexos pois dentro deles têm muitos circuitos eléctricos e muitos mecanismos.
Ou seja, são sistemas que possuem dentro outros sistemas, ou subsistemas.
O corpo humano é também um exemplo de sistema, e de um sistema bastante
sofisticado, cheio de subsistemas: o sistema circulatório, o sistema respiratório, o
aparelho digestivo, o sistema nervoso, etc., etc.
48
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Na verdade, o corpo humano de cada pessoa é um sistema diferente. E cada órgão dela,
(seja o cérebro, ou o coração, ou os pulmões, ou o fígado, ou os rins, ou o intestino, ou o
pâncreas, etc.), é um subsistema do mesmo.
Mas há muitos outros sistemas menos palpáveis como por exemplo:
o aquecimento de uma casa;
o funcionamento dos elevadores de um edifício;
a automação de uma fábrica;
a gestão e a economia de um país;
etc.
49
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Os sinais que estudamos aqui, em geral, estão associados a algum sistema. Eles podem
representar, por exemplo, a entrada de um sistema, ou alternativamente, a saída do sistema.
O sinal de entrada de um sistema (“input” em inglês) às vezes também é chamado de o
‘controlo’ ou mesmo a ‘excitação’ do sistema.
Por outro lado, a saída de um sistema (“output” em inglês) às vezes também é chamada
de a ‘resposta’ ou a a ‘observação’ do sistema.
Sistema
entrada
(“input”)
controlo
excitação
saída
(“output”)
resposta
observação
Na realidade muitos sistemas têm não apenas uma entrada e uma saída mas múltiplas
entradas e/ou múltiplas saídas.
Sistema
entradas
saídas
Classificações de Sistemas:
Há muitas classificações para os sistemas.
Quanto a Natureza Física, sistemas podem ser classificados de muitas formas diferentes,
como por exemplo:
eléctricos;
aeronáuticos;
mecânicos;
aeroespaciais;
electromecânicos;
biológicos;
térmicos;
biomédicos;
hidráulicos;
económicos;
ópticos;
sociológicos;
acústicos;
sócio-económicos;
informáticos;
etc.
50
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Entretanto, a maioria dos sistemas complexos são combinações de vários subsistemas de
naturezas diferentes.
Por exemplo: um computador, uma antena parabólica para receber emissões de satélites
artificiais, um braço manipulador mecânico, um robot antropomórfico que imite um ser vivo,
etc. são exemplos de sistema que combinam mais de uma natureza das classificações
acima.
Na medicina, por exemplo, encontramos muitos sistemas de bio-engenharia (ou seja,
sistemas biológicos e biomédicos em simultâneo com sistemas mecânicos, eléctricos ou
electrónicos).
Um membro artificial, ou cada aparelho numa sala de operação são exemplos de
sistemas biomédicos.
Quanto a Continuidade no Tempo, sistemas podem ser classificados como:
contínuos
discretos
discretizados
Sistemas podem ser naturalmente contínuos, naturalmente discretos, ou contínuos que são tornados
discretos.
51
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Quanto a Linearidade, sistemas podem ser classificados como:
lineares
não lineares
Sistemas contínuos são lineares se:
• quando o sinal de entrada x(t) é multiplicado por um valor k; então o sinal de saída
y(t) fica também multiplicado por este mesmo valor k; e além disso,
• quando o sinal de entrada é a soma de dois sinais x1(t) e x2(t), que produzem
individualmente sinais de saída y1(t) e y2(t) respectivamente; então o sinal de saída é
a soma dos sinais de saída y1(t) e y2(t).
52
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
No caso discreto a definição de sistemas lineares é semelhante. Sistemas lineares são
aqueles que:
• quando o sinal de entrada x[n] é multiplicado por um valor k; então o sinal de
saída y[n] fica também multiplicado por este mesmo valor k; e além disso,
• quando o sinal de entrada é a soma de dois sinais x1[n] e x2[n], que produzem
individualmente sinais de saída y1[n] e y2[n] respectivamente; então o sinal de saída
é a soma dos sinais de saída y1[n] e y2[n].
Exemplo 14:
Considere os sistemas descritos pelas relações abaixo entre o sinal de entrada x[n] ou x(t)
e o sinal de saída y[n] ou y(t).
Sistema I → y [ n ] + 7 y [ n − 1 ] + 2 y [ n − 2 ] = x [ n ] − 4 x [ n − 1 ] (sistema discreto e linear)
Sistema II → y [ n
Sistema III →
]=
− 4 x [ n − 1 ] (sistema discreto e linear)
y [ n ] − 5 n y [ n − 1 ] = x [ n + 1 ] − 2 x [ n ] (sistema discreto e linear)
Sistema IV → y [ n ] = 2 (x [ n ])2 − 4 x [ n ] (sistema discreto e não linear)
Sistema V → y [ n ] =
3
x[ n ]
2
(sistema discreto e não linear)
2
Sistema VI → d y + 4 dy − y = dx + 3 x (sistema contínuo e linear)
dt 2
dt
dt
2
Sistema VII → d y2 + 6t dy + y = dx − (t − 3) x (sistema contínuo e linear)
dx
dx
dt
Sistema VIII →
d 2y
dy
dx
+5
+ 2y =
− x (t + 3) (sistema contínuo e linear)
2
dx
dx
dt
Sistema IX → 3y ′′ − 2 y ′ + y = x ′x (sistema contínuo e não linear)
Sistema X → 10 y ′′ + 2 y ′ − y = e x (sistema contínuo e não linear)
53
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
2
Sistema XI → d y + x dy + y = 0 (sistema contínuo e não linear)
dx 2
dx
Sistema XII → y(t) = 2 x(t) - 5 (sistema contínuo e linear)
Sistema XIII → y(t) = x(t - δ ) (sistema contínuo e linear)
Quanto a Variância no Tempo, sistemas podem ser classificados como:
variantes no tempo
invariantes no tempo
Um sistema invariante no tempo é aquele que para um sinal de entrada x(t), o sinal de
saída é y(t), não importa quando é aplicada esta entrada.
Ou seja, as condições dinâmicas do sistema não mudam com o passar do tempo. Na
realidade nenhum sistema é invariante no tempo, mas na prática consideramos como
invariante no tempo muitos sistemas cuja variação no tempo é muito lenta.
Exemplo 15:
Nos sistemas descritos no Exemplo 14 acima temos que:
apenas sistema III e sistema VII são variantes no tempo,
pois um ou mais de seus coeficientes variam com o tempo (‘t’ ou ‘n’). Os demais são
sistemas invariantes no tempo.
Quanto a Natureza Aleatória, sistemas podem ser classificados como:
determinísticos
estocásticos
54
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Um sistema determinístico é aquele que não sofre a influência de nenhuma perturbação
aleatória, ou seja, não tem incerteza. O sinal de saída y(t) para um sinal de entrada x(t)
pode ser calculado (ou “determinado”) com precisão quando se conhece o modelo do
sistema.
Na realidade nenhum sistema é determinístico. Todos os sistemas têm algum tipo de
incerteza ou carácter aleatório e portanto chamados de estocásticos. Na prática
entretanto consideramos como determinísticos muitos sistemas cujas perturbações
aleatórias são pequenas ou desprezíveis.
Quanto a Memória, sistemas podem ser classificados como:
sem memória
com memória
Um sistema sem memória é aquele que: se o seu sinal de saída no instante t1 depende
apenas do sinal de entrada daquele instante t1.
Exemplo 16:
Nos sistemas descritos no Exemplo 14 acima temos que:
apenas sistema IV, sistema V e sistema XII são sem memória,
pois a saída y[n] ou y(t) depende da entrada x[n] ou x(t) apenas nos instantes de tempo
(‘t’ ou ‘n’). Os demais são sistemas com memória pois dependem da entrada x[n] nos
instantes (n-1), (n-2), etc; ou de derivadas em relação ao tempo ‘t’.
Quanto a Inversibilidade, sistemas podem ser classificados como:
inversíveis
não inversíveis
Sistemas são inversíveis se entradas distintas levam a saídas distintas.
Desta forma, para um sistema S com sinal de entrada x[n] ou x(t) que produz um sinal de
saída y[n] ou y(t), respectivamente, é possível achar um sistema inverso S-1 cuja entrada
y[n] ou y(t) produz a saída x[n] ou x(t), respectivamente.
Através de um esquema em que os sistemas S e S-1 são postos em cascata, (isto é, a
saída y(t) do Sistema S é a entrada do Sistema S-1), podemos recuperar x(t), o sinal de
entrada aplicado em S, na saída de S-1.
55
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Exemplo 17:
Considere o sistema XII do Exemplo 14 acima. A relação entre os sinais de entrada e
saída de um sistema é:
y(t) = 2 x(t) – 5;
Obviamente, neste sistema, cada sinal de entrada x(t) produz um sinal de saída y(t)
exclusivo diferente das saídas das outras entradas. Além disso, o sinal de entrada x(t)
pode ser expresso em termos do sinal de saída y(t) como:
x(t) = ½ (y(t) + 5).
Exemplo 18:
O sistema XIII do Exemplo 14 acima também é inversível.
y(t) = x(t - δ )
eq. (E)
Este é o chamado sistema com retardo (“time delay system”) pois a saída reproduz a
entrada com um atraso de δ unidades de tempo.
Podemos facilmente verificar que sinais de entrada x(t) distintos produzem sinais de saída
y(t) distintos. O sinal de entrada x(t) expresso em termos do sinal de saída y(t) é:
x(t) = y(t + δ)
eq. (F)
que é conhecido como sistema em avanço (“time advance system”) pois neste caso o
sinal de saída x(t) reproduz o que será o sinal de entrada y(t) em δ unidades de tempo
depois.
No caso discreto o sistema com retardo (“time delay system”) tem a forma:
y[n] = x[n - nδ ]
eq. (G)
e o sistema inverso, o sistema em avanço (“time advance system”) que expressa x[n] em
função de y[n] é
x[n] = y[n + nδ]
eq. (H)
Quanto a Causalidade, sistemas podem ser classificados como:
causais (ou não antecipativos)
não causais (ou antecipativos)
Um sistema é causal (ou não antecipativo) se a saída no instante t1 depende da entrada
apenas nos instantes t ≤ t1 .
56
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
É claro que se a saída no instante t1 dependesse da entrada em instantes t > t1 então este
sistema anteciparia o que ia acontecer e portanto seria “antecipativo” ou não causal.
No nosso mundo físico real, se a variável ‘t’ (ou ‘n’ no caso discreto) representa o tempo,
então tem uma dinâmica que evolui no tempo e portanto não é possível se ter um sistema
não causal pois não é possível se prever o futuro.
Entretanto, há casos que a esta variável ‘t’ (ou ‘n’ no caso discreto) pode representar
outro parâmetro ou uma outra grandeza física (que não seja o tempo) e desta forma já é
possível ocorrer sistemas causais.
Exemplo 19:
Nos sistemas descritos no Exemplo 14 acima temos que:
apenas sistema III é não causal (ou antecipativo),
pois a saída y[n] depende da entrada x[n] no instante de tempo (n+1). Os demais são
sistemas causais (ou não antecipativos).
Entretanto, no Exemplo 18 acima, os sistemas em avanço (“time advance systems”) das
equações eq. (F) e eq. (H) são também claramente exemplos de sistemas não causais
ou antecipativos.
Quanto ao Equacionamento, sistemas podem ser classificados como:
com Equações de Diferenças [no caso discreto]
com Equações Diferenciais Ordinárias (EDO) [no caso contínuo]
com Equações Diferenciais Parciais (EDP) [no caso contínuo]
Exemplo 20:
Nos sistemas descritos no Exemplo 14 acima temos que:
Sistemas I, II, III, IV e V são descritos por equações de diferença; e
Sistemas VI, VII, VIII, IX e XI são descritos por equações diferenciais ordinárias (EDO).
Por outro lado apresentamos abaixo a equação de onda conhecida da Física:
⎛ ∂ 2u ∂ 2u ∂ 2u ⎞
∂u
= k ⎜⎜ 2 +
+
⎟ =
∂t
∂y 2 ∂z 2 ⎟⎠
⎝ ∂x
= k (u xx + u yy + u zz )
que descreve a propagação de uma onda no espaço. Este é um exemplo de sistema
descrito por equações diferenciais parciais (EDP).
57
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Sistemas Lineares e Invariantes no Tempo (SLIT)
No caso particular de sistemas lineares e invariantes no tempo (SLIT) denota-se por h[n]
e por h(t) as respostas do sistema à entrada impulso, uo[n] ou uo(t), respectivamente.
Ou seja:
h[n] = a saída do sistema quando a é entrada impulso, uo[n], (no caso discreto),
sistema discreto
e,
h(t) = a saída do sistema quando a é entrada impulso uo(t), (no caso contínuo).
sistema contínuo
Um resultado clássico em Teoria de Sistemas é que:
No caso discreto, a saída de um sistema linear invariante no tempo (SLIT) toma a forma
de uma soma de convolução:
y [n] = h[n] ∗ x [n]
=
+∞
∑ h[ n − k] ⋅ x[k]
eq. (I)
k=−∞
Ou seja, h[n] traz consigo toda a informação do sistema necessária para saber a saída de
qualquer sinal de entrada x[n].
Sabendo-se h[n] nós podemos saber a saída de qualquer sinal de entrada x[n], pela
equação da soma de convolução (eq. (I)) acima.
58
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
No caso contínuo, a saída de um sistema linear invariante no tempo (SLIT) toma a forma
de uma integral de convolução:
y(t) = h(t) ∗ x(t)
=
+∞
∫−∞
h(t − τ) ⋅ x(τ)
eq. (J)
Ou seja, h(t) traz consigo toda a informação do sistema necessária para saber a saída de
qualquer sinal de entrada x(t) respectivamente.
Sabendo-se h(t) nós podemos saber a saída de qualquer sinal de entrada x(t), pela
equação da integral de convolução (eq. (J)) acima.
Propriedades da Convolução
o Propriedade Comutativa:
h[n] ∗ x[n] = x[n] ∗ h[n]
h(t) ∗ x (t) = x (t) ∗ h(t)
o Propriedade Distributiva:
( h [n] + h [n] ) ∗ x[n] = h [n] ∗ x[n] + h [n] ∗ x[n]
1
2
1
(
2
)
∗ h 1 (t) + h 2 (t) ∗ x (t) = h 1 (t) ∗ x (t) + h 2 (t) * x (t)
o Propriedade Associativa:
( h [n] ∗ h [n] ) ∗ x[n] = h [n] ∗ ( h [n] ∗ x[n] )
1
2
1
2
( h (t) ∗ h (t) ) ∗ x(t) = h (t) ∗ ( h (t) ∗ x(t) )
1
2
1
59
2
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Pela propriedade comutativa podemos concluir que, no caso discreto, a resposta y[n] de
um sistema linear invariante no tempo (SLIT) tanto pode ser a convolução de h[n] * x[n]
como também pode ser a convolução de x[n] * h[n].
Ou seja, a eq. (I) acima é equivalente à
y[n] = h[n] ∗ x[n] =
= x[n] ∗ h[n] =
+∞
∑ h[ n − k] ⋅ x[k] =
k=−∞
+∞
∑ x[ n − k] ⋅ h[k].
k=−∞
Semelhantemente, a propriedade comutativa permite concluir que, no caso contínuo, a
resposta y(t) de um sistema linear invariante no tempo (SLIT) tanto pode ser a convolução
de h(t) * x(t), como também pode ser a convolução de x(t) * h(t).
Ou seja, a eq. (J) acima é equivalente à
y(t) = h(t) ∗ x(t) =
= x (t) ∗ h(t) =
+∞
∫−∞ h(t − τ) ⋅ x(τ)
+∞
∫−∞ x(t − τ) ⋅ h(τ).
A propriedade distributiva corresponde ao facto de que, pela linearidade, se 2 sistemas S1
e S2, lineares e invariantes no tempo (SLIT) se somam, então a resposta à entrada
impulso unitário da soma dos sistemas (S1 + S2) é ( h1[n] + h2[n] ) no caso discreto ou
( h1(t) + h2(t) ) no caso contínuo, onde obviamente
h1[n] ou h1(t) = a resposta do sistema S1 à entrada impulso unitário; e
h2[n] ou h2(t) = a resposta do sistema S2 à entrada impulso unitário.
Portanto, no caso discreto, a resposta y[n] da soma de 2 sistemas S1 e S2, lineares e
invariantes no tempo (SLIT), tanto pode ser a soma das convoluções h1[n] * x[n] com
h2[n] * x[n], como também pode ser a convolução da soma ( h1[n] + h2[n] ) com x[n].
Ou seja:
y [n] = h1 [n] ∗ x [n] + h2 [n] ∗ x [n] = ( h1 [n] + h 2 [n] ) * x [n]
Semelhantemente, no caso contínuo, a resposta y(t) da soma de 2 sistemas S1 e S2,
lineares e invariantes no tempo (SLIT), tanto pode ser a soma das convoluções h1(t) * x(t)
com h2(t) * x(t), como também pode ser a convolução da soma ( h1(t) + h2(t) ) com x(t).
Ou seja:
y(t) = h 1 (t) ∗ x(t) + h 2 (t) ∗ x(t) = ( h 1 (t) + h 2 (t)
60
) ∗ x(t)
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Na figura acima ilustramos, para o caso contínuo, a soma de 2 sistemas S1 e S2 nos quais
são aplicados a mesma entrada x(t). Na figura abaixo ilustramos o sistema equivalente.
Finalmente, a propriedade associativa diz respeito à sistemas ligados em cascata. Isto é,
sistemas em que a saída de um deles é a entrada do outro.
A propriedade associativa nos diz que: se 2 sistemas S1 e S2, lineares e invariantes no
tempo (SLIT), estão ligados em cascata então a resposta à entrada impulso unitário dos 2
sistemas juntos (S1 e S2) é a convolução ( h1[n] * h2[n] ) no caso discreto ou a convolução
( h1(t) * h2(t) ) no caso contínuo.
Logo, no caso discreto, a resposta y[n] de 2 sistemas S1 e S2, lineares e invariantes no
tempo (SLIT), ligados em cascata, tanto pode ser a convolução dupla de h1[n] com h2[n]
primeiro, e depois o resultado com x[n], como também pode ser a convolução dupla de
h1[n] com o resultado de h2[n] com x[n].
Ou seja:
y[n] = ( h1 [n] ∗ h 2 [n] ) ∗ x[n] = h1 [n] ∗ ( h 2 [n] ∗ x[n] ).
61
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Além disso, note que: pela propriedade comutativa, observamos que tanto faz a ordem
em que os sistemas S1 e S2 estão em cascata pois h1[n] * h2[n] = h2[n] * h1[n].
Nas figuras acima ilustramos os 2 sistemas S1 e S2 em cascata para este caso discreto.
Na figura abaixo ilustramos o sistema equivalente.
Semelhantemente, no caso contínuo, a resposta y(t) de 2 sistemas S1 e S2, lineares e
invariantes no tempo (SLIT), ligados em cascata, tanto pode ser a convolução dupla de
h1(t) com h2(t) primeiro, e depois o resultado com x(t), como também pode ser a
convolução de h1(t) com o resultado da convolução de h2(t) com x(t).
Ou seja,
y(t) = ( h1 (t) ∗ h 2 (t) ) ∗ x(t) = h1 (t) ∗ ( h 2 (t) ∗ x(t) ) .
SLIT sem memória
É fácil de verificar que: no caso discreto, se um sistema linear e invariante no tempo
(SLIT) é sem memória então a sua resposta ao impulso h[n] é da forma:
h[n] = k uo [n]
onde k = h[0] é uma constante.
Portanto, pela fórmula da convolução (eq. (I)), temos que:
y [n] = h[n] ∗ x [n] =
+∞
∑ h[ n−k] ⋅ x [k] =
k=−∞
62
+∞
∑ k uo [ n−k] ⋅ x [k],
k=−∞
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
logo,
y [n] = k x [n]
Por outro lado, no caso contínuo, se um sistema linear e invariante no tempo (SLIT) é
sem memória então a sua resposta ao impulso h(t) é da forma:
h(t ) = k uo (t )
onde k = área do impulso uo(t).
Portanto, pela fórmula da convolução (eq. (J)), temos que:
y(t) = h(t) ∗ x (t) =
+∞
∫−∞ h(t − τ) ⋅ x (τ)
=
+∞
∫−∞ k uo (t − τ) ⋅ x (τ)
logo,
y (t ) = k x (t )
SLIT inversíveis
Se um sistema linear e invariante no tempo (SLIT) é inversível então a seu inverso
também é um SLIT.
A figura abaixo ilustra a situação para o caso discreto:
caso discreto
onde aqui, obviamente:
63
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
h1[n] = a resposta do sistema S à entrada impulso unitário; e
h2[n] = a resposta do sistema inverso, S-1, à entrada impulso unitário.
A figura abaixo ilustra a situação para o caso contínuo:
caso contínuo
onde aqui, obviamente:
h1(t) = a resposta do sistema S à entrada impulso unitário; e
h2(t) = a resposta do sistema inverso, S-1, à entrada impulso unitário.
No caso discreto temos que o sistema total (“overall system”), em cascata, ambos o sinal
de entrada e o sinal de saída são x[n], e portanto este sistema total é a identidade.
E, como na identidade h[n] = uo[n], temos então que:
h1[n] * h2[n] = uo[n]
eq. (K)
Semelhantemente, no caso contínuo temos que o sistema total (“overall system”), em
cascata, ambos o sinal de entrada e o sinal de saída são x(t), e portanto este sistema total
é a identidade.
E, como na identidade h(t) = uo(t), temos que:
h1(t) * h2(t) = uo(t)
64
eq. (L)
J. A. M. Felippe de Souza
Notas em Sinais e Sistemas
Exemplo 21:
Os sistemas descritos no Exemplo 18 acima são SLIT e temos que as respostas ao
impulso unitário h1(t) e h2(t) para os sistemas das equações eq. (G) e eq. (H) são
respectivamente:
h1 (t) = u o (t - δ ) e h2(t) = uo(t + δ)
que nitidamente satisfazem a eq. (L) acima, h1(t) * h2(t) = uo(t).
Por outro lado temos que as respostas ao impulso unitário h1[n] e h2[n] para os sistemas
das equações eq. (F) e eq. (G) são respectivamente:
h1[n] = uo[n - nδ ] e h2[n] = uo[n + nδ]
que nitidamente satisfazem a eq. (K) acima, h1[n] * h2[n] = uo[n]
Outros assuntos tratados em Teoria de Sistemas
Modelização ou Modelamento
Identificação de parâmetros
R(s)
Controlo
+
-
1
( 3 s + 2)
Estabilidade
K
Optimização
Simulação
Realimentação (‘feedback’)
Estimação de Estado
Sistemas robustos
Sistemas tolerantes à falhas
Processamento distribuído
Processamento paralelo
Lógica ‘fuzzy’
65
Y(s)
Baixar