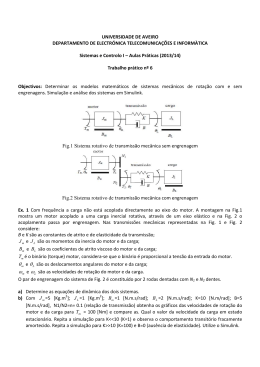
Motor de Passo Background Um motor elétrico é uma máquina que converte energia elétrica em movimento mecânico. Em particular, um motor de passo converte pulsos elétricos em rotação mecânica usando movimentos pequenos e não-contínuos. Fundamentalmente, um motor de passo consiste de uma peça de aço na forma de engrenagem rodeada por electromagnetos (EM), como mostrado na imagem abaixo. O movimento rotacional de um motor é gerado ligando os eletromagnetos em sequência. Quando o primeiro eletromagneto é ligado, ele atrai o dente a engrenagem causando um alinhamento do dente com esse eletromagneto. Subsequentemente, o segundo eletromagneto é energizado, causando outra pequena rotação, e assim por diante. Usando a ordem correta, a contínua energização dos eletromagnetos em uma sucessão rápida gera uma contínua rotação. A natureza dos motores de passo permite a eles serem ligados por ângulos precisos, tornando-os úteis em operações unde é necessário precisão. As seguintes aplicações demonstram o conceito de um moror de passo básico. Na primeira atividade, clique nos botôes para manualmente energizar os eletromagnetos individualmente. Na segunda atividade, você pode programar uma sequência de botões a serem pressionados em vez de ativar manualmente o motor de pasos. O botão loop permite à sequencia ser repetida indefinidamente. Ajustando o deslizador de atraso ajustará o tempo de pausa entre os botões pressionados; quanto menor a discagem, mais curta é a pausa. Considere essas questões: 1) O que você pode fazer para rotacionar o motor no sentido horário em uma maneira suave? 2) Como você pode atingir a a rotação específica de 36°? Atr aso : L... In... R... Soluções 1) O que você pode fazer para rotacionar o motor no sentido horário em uma maneira suave? As respostas podem variar. Loop Possível: EM 2, EM 3, EM 4, EM 1 2) Como você pode atingir a a rotação específica de 36°? O rotor central possui 25 dentes e leva quatro passos para a engrenagem avançar um dente, enquanto ela se alinha sucessivamente com os magnetos EM1, EM2, EM3 e EM4. Portanto, a engrenagem entrará em uma completa rotação em 25 * 4 = 100 passos. Como um resultado, cada passo rotaciona a engrenagem 360°/100 = 3.6°. Para obter uma rotação de 36°, 36 / 3.6 = 10 passos sucessivos são necessários. Mais Sobre Motores de Passo Existem vários tipos básicos de motores de passo: Magneto Permanente Relutância Variável Híbrida Um motor de passo de magneto permanente possui um rotor central, que é separado em pólos e náo possui dentes. Os eletromagnetos são energizados em pares e magnetizados em polaridades diferentes, causando o alinhamento do rotor ao longo do campo magnético. Um motor de passo de relutância variável possui um rotor que é feito de ferro macio e possui dentes como uma engrenagem. Não é um magneto permanente. Quando o eletromagneto é energizado, o rotor rotaciona para diminuir a distância entre o eletromagneto e o dente. Quando o dente do rotor se alinha com um eletromagneto, eles estão desalinhados com o próximo. Aumentando o número de dentes permite passos de ângulos menores. O motor de passos na atividade acima é um exemplo de um motor de passos de relutância variável. Um motor de passos híbrido contém características tanto de um magneto permanente quanto de um motor de relutância variável. Ele trabalha usando o mesmo princípio. Operação de um motor permanente básico A fase de um motor de passos se refere ao número possível de condições diferentes. Até agora, motores difásicos e tetrafásicos foram discutidos. Motores de passo mais complexos podem possuir várias fases. Aumentando o número de fases aumenta a resolução do motor, permitindo passos menores. Motores de passo são genericamente usados quando precisão é exigida. Aplicações desses motores incluem impressoras e scaners, correias transportadoras, e ferramentas de máquinas.
Baixar