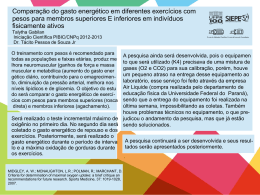
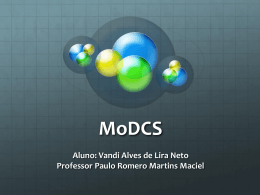
MEDIÇÃO E ANÁLISE DO CONSUMO ENERGÉTICO DA ÓRTESE ORTHOLEG NOS MOVIMENTOS DE LEVANTAR E SENTAR FLÁVIO PINHEIRO DA COSTA1, MÁRCIO VALÉRIO DE ARAÚJO 1, VANESSA GABRIELA DE SOUZA MORAES 1, ,PABLO 1 JAVIER ALSINA. 1. Laboratório de Robótica , Departamento de Engenharia de Computação e Automação ,Universidade Federal do Rio Grande do Norte, 59078-900 Lagoa Nova, Natal, RN E-mails: [email protected], [email protected], [email protected], [email protected] Abstract The electric current measurement of robotic devices is often used to estimate the energy consumption, therefore this parameter can be used to improve the efficiency, and in the case of devices that use batteries as an energy source, it is pos sible to estimate the battery life or adjust a battery to certain autonomy. To measure the electric current a data acquisition’s electronic board using a microcontroller and current sensors has been developed, as well various electronic components. The values of the currents measured by the board are sent, via USB cable to a computer in real time for analysis and visualization of their beha vior. This current acquisition’s board has the application to estimate the energy consumption of electric actuators responsible for triggering the joints of an active orthosis for lower limbs during the movement of sitting and standing. The measuring board showed satisfactory results, in the fact that the device is able to make up to four simultaneous measurements in real-time variation of the electric current. Keywords Robotic devices, energy consumption, Autonomy, Microcontroller, Active orthosis Resumo A medição da corrente elétrica de dispositivos robóticos é bastante utilizada para estimar o consumo energético, portanto esse parâmetro pode ser usado para melhorar a eficiência, e no caso de dispositivos que usam baterias como fonte de energia, é possível estimar a autonomia da bateria ou dimensionar uma bateria para uma determinada autonomia. Para medir a corrente elétrica foi desenvolvida uma placa de aquisição de dados usando um microcontrolador e sensores de corrente, além de diversos componentes eletrônicos. Os valores das correntes medidas pela placa são enviados, via cabo USB, para um computador em tempo real para analise e visualização de seu comportamento. Essa placa de aquisição de corrente tem como aplicação est imar o consumo energético de atuadores elétricos responsáveis por acionar as juntas de uma órtese ativa para membros inferiores durante o movimento de sentar e levantar. A placa de medição apresentou resultados satisfatórios, visto que a mesma é capaz de fazer até quatro medidas simultâneas e em tempo real da variação da corrente elétrica. Palavras-chave Dispositivos robóticos, Consumo energético, Autonomia, Microcontrolador, Órtese ativa 1 INTRODUÇÃO A análise do consumo energético de dispositivos robóticos destinados a reabilitação pode ser uma ferramenta útil para se determinar a autonomia de uso e compreender o funcionamento desses equipamentos em determinadas condições de operação. Alguns artigos científicos já estão apresentando resultados preliminares sobre medição de corrente elétrica dos atuadores de órteses robóticas para membros inferiores como é o caso do trabalho de Peter (Neuhaus, 2011). Dispositivos robóticos ortopédicos a cada dia estão se tornando mais populares, todavia, ainda há poucos trabalhos sendo publicados nessa área apresentando o consumo energético. A busca de uma melhor eficiência energética desses dispositivos é de interesse de diversos grupos de pes- quisas e de empresas. Uma órtese ativa para membros inferiores é um dispositivo robótico que auxilia na locomoção de pessoas com mobilidade reduzida, o estudo do comportamento energético desses dispositivos robóticos é importante para selecionar e executar movimentos mais eficientes e também para se determinar a autonomia das baterias. Os seres humanos evoluíram a sua forma de caminhar e realizar outros movimentos ao longo dos tempos, mas alguns parâmetros ainda influenciam no consumo energético como a velocidade, tamanho do passo, peso corporal, inclinação do terreno percorrido, entre outros, esses mesmos fatores podem ser usados para analisar se as órteses ativas para membros inferiores também variam o seu consumo energético em função da velocidade, tamanho do passo, frequência da passada, etc. Movimentos como sentar e levantar podem ser mais ou menos eficientes, dependendo da forma como ele é realizado, todavia, o ser humano tende sempre a minimizar o consumo energético durante a realização desses movimentos, deslocando o centro de massa do corpo, fazendo com que ele fique projetado para a área onde os pés estão em contato com o chão, usar apoios para se levantar ou até mesmo modificando a velocidade altera significativamente o consumo energético desse movimento. Para melhorar a eficiência energética em órteses ativas para membros inferiores é necessário investir em materiais mais leves e resistentes para a construção da estrutura mecânica, utilizar sistemas eletrônicos e de controle mais eficazes, atuadores mais eficientes e, além disso, realizar movimentos que diminuam o gasto energético. Uma maneira de descobrir quais são os movimentos que gastam menos energia é através da medição do consumo energético da órtese enquanto ela executa algumas tarefas como caminhar, sentar e levantar, subir e descer degraus, passar por cima de pequenos obstáculos, dessa forma tem-se um melhor entendimento do consumo energético em função dos movimentos realizados. Atualmente não se conhece nenhum trabalho que visa levantar o consumo energético de tais dispositivos e com base nas informações obtidas tentar melhorar a eficiência energética, portanto é fundamental pesquisar sobre esses temas que tem aplicação imediata e trarão benefícios em curto prazo. O objetivo desse trabalho é apresentar um sistema microcontrolado de medição de corrente elétrica embarcado em uma órtese ativa para membros inferiores utilizado para estimar o consumo energético dos atuadores elétricos durante a realização de vários movimentos. Neste trabalho são estimados o consumo energético dos movimentos de sentar e levantar. 2 ÓRTESES ATIVAS PARA MEMBROS INFERIORES Uma órtese é um mecanismo ortopédico não invasivo, posicionado externamente, cuja função é alinhar, prevenir ou corrigir deformidades ou até mesmo para melhorar a função das partes móveis do corpo. Órteses ativas utilizam atuadores para produzir o movimento nos membros de uma pessoa que é incapaz de executá-los por si só, sendo ocasionado devido a algum tipo de paralisia, como lesão medular, ou até mesmo por falta de força, no caso de pessoas com problemas musculares. Já as órteses ativas para membros inferiores têm como aplicação permitir que pessoas sem movimentos ou com mobilidade reduzida nas pernas possam se locomover com um padrão de marcha semelhante a um indivíduo saudável. Órteses ativas para membros inferiores são dispositivos basicamente constituídos por um conjunto de estruturas rígidas unidas por juntas rotacionais e acionadas por atuadores que podem ser elétricos, hidráulicos, pneumáticos, entre outros. Cada articulação pode possuir um ou mais graus de liberdade, suficiente para produzir os diversos tipos de movimentos em cada junta atuada (Pons, 2008). Diversos grupos de pesquisas já estão desenvolvendo trabalhos sobre órteses ativas, entre eles algumas universidades brasileiras. Os principais desenvolvedores de órteses ativas para membros inferiores são as empresas Ekso Bionics (EUA), Argo Medical Technologies (Israel) e Rex Bionics (Nova Zelândia), pois já comercializam seus produtos como apresentou (Dollar, 2007), (Low, 2011). A órtese ativa apresentada pela Ekso Bionics corresponde a uma estrutura mecânica com diversos apoios no usuário através de cintas elásticas. Este dispositivo apresenta uma mochila contendo o sistema eletrônico embarcado e a bateria recarregável de 4 horas de autonomia. Esta órtese é capaz de suportar um usuário de até 100 Kg e com altura entre 1,6 e 1,9 metros. Para evitar a queda do usuário o mesmo tem que se locomover usando muletas ou um andador, proporcionando uma condição de três pontos de equilíbrio durante a locomoção, o que proporciona uma maior segurança na locomoção e certa autonomia para realizar curvas utilizando as muletas (Strickland, 2012) e (Ekso, 2014). A empresa Argo Medical Technologies desenvolveu uma órtese ativa para membros inferiores com o intuito de ajudar pessoas paraplégicas a se locomoverem e realizar tarefas do cotidiano como caminhar, subir e descer escadas e sentar. A órtese denominada REWALK já é distribuída em centros de reabilitação de diversos países e é constituída por motores de corrente continua, baterias recarregáveis, um conjunto de sensores e uma interface homem-máquina localizada no pulso do usuário na forma de um bracelete com diversos botões que controlam a órtese por meio de transmissão sem fio. O usuário usa um par de muletas para manter a estabilidade, segurança da caminhada e distribuir o peso total em uma condição de equilíbrio semelhante ao da Ekso Bionics (Argo, 2014). Uma órtese, também ativa, construída pela empresa Rex Bionics denominada REX é controlada por um joystick, realizando os movimentos de caminhar, subir e descer degraus e andar em ambientes com aclives e declives. Contem uma bateria recarregável de até 2 horas de autonomia. O sistema não usa apoios na locomoção, pois apresenta controle de estabilidade, mas sua velocidade na caminhada é bastante inferior as outras duas órteses proporcionando um grande problema na locomoção em ambientes abertos, principalmente para realizar atividades triviais que necessitam de agilidade para executá-las, como atravessar uma faixa de pedestre em uma condição limitada de tempo (Rex, 2014). Em 2011 foi publicado por Quintero um trabalho onde é apresentada uma órtese ativa para membros inferiores dotada de motores elétricos com caixa de redução (24:1) capazes de produzir um torque contínuo de 12 Nm (H. Quintero, R. Farris, and M. Goldfarb,2011) Com o auxílio desse dispositivo, um usuário paraplégico conseguiu realizar uma série de movimentos como levantar e caminhar apoiado em barras laterais de sustentação. Neste artigo são apresentadas medidas de corrente elétrica, todavia, não é feito nenhum comentário em relação da utilização dessa medida. Na Universidade Federal do Rio Grande do Norte, foi desenvolvido, pelo grupo de Robótica e Sistemas Dedicados do Departamento de Computação e Automação (DCA/UFRN) um protótipo de órtese ativa com atuação nos membros inferiores, ao qual foi batizada de Ortholeg (M. Araujo and P. Alsina, 2015). Este protótipo foi projetado inicialmente para ser usada por um indivíduo com peso entre 50 kg e 60 kg e altura entre 1,55 metros e 1,65 metros. Na próxima seção são apresentadas mais informações sobre a órtese Ortholeg e a arquitetura do sistema de medição de corrente. 3 ÓRTESE ORTHOLEG A órtese Ortholeg apresenta atualmente uma estrutura pseudo-antropomórfica com dimensões estruturais reguláveis para melhor conforto e utilização do usuário, além de apresentar um sistema de fixação do usuário através de um colete ortopédico e calhas de plástico, auxiliadas por cintas com velcro localizadas em pontos estratégicos no tórax e nas pernas para desempenhar uma melhor segurança e conforto. Para garantir uma maior segurança e equilíbrio durante os movimentos, o usuário da órtese utiliza muletas. A Ortholeg é constituída por um conjunto de estruturas rígidas unidas por juntas rotacionais, através de atuadores rotacionais elétricos fixadas nas juntas dos joelhos e do quadril. Cada articulação possui apenas um grau de liberdade, produzindo os movimentos de extensão e flexão em ambas as juntas, possibilitando a realização dos movimentos de caminhada, subir e descer escadas, transpor pequenos obstáculos, sentar e levantar (Araújo, 2009). A Figura 1 mostra a imagem da órtese Ortholeg. responsável por realizar o controle da locomoção. Essa interface homem-máquina é baseada em botões que ficam instalados na muleta. O sistema eletrônico embarcado é usado para interpretar os comandos de alto nível pré-definidos oriundos da interface e determinar o tipo de movimento que a órtese vai realizar, gerando ângulos de referências para o controlador que por sua vez acionará os motores das juntas fazendo com que elas realizem os movimentos pretendidos. As posições angulares de cada junta são medidas pelos encoders posicionados no eixo dos atuadores elétricos e pelas chaves de fim de curso fixadas em cada junta. Cada encoder gera uma sequência de pulsos, cuja frequência é proporcional à velocidade do motor, proporcionando a medição da posição angular de cada junta de forma precisa, permitindo um melhor controle de posicionamento da órtese. As chaves fim de curso proporcionam um sistema de segurança, onde impedem que as articulações atinjam os limites mecânicos e fornecem referencias dos limites dos ângulos (Araújo, 2012). Sensores medem a corrente elétrica de cada atuador e envia essas informações para o computador embarcado em tempo real. A medição do consumo energético dos atuadores pode ser utilizada para definir o consumo energético da órtese ao realizar alguns movimentos, investigar possíveis falhas e até mesmo o mau funcionamento dos atuadores. A Figura 2 apresenta a arquitetura de hardware da órtese Ortholeg. Figura 2. Arquitetura de hardware embarcada na órtese. 4 METODOLOGIA 4.1 MEDIÇÃO DO CONSUMO ENERGÉTICO DA ÓRTESE Figura 1. Protótipo da órtese Ortholeg . Além disso, a órtese apresenta uma interface homem-máquina que envia comandos de alto nível via porta USB para um sistema eletrônico embarcado Anos de evolução proporcionaram aos seres humanos uma forma de caminhar que economizasse o máximo de energia. Estudos na área de biomecânica do corpo humano relacionam a energia consumida para realizar um dado movimento em função de algumas variáveis como a velocidade com que o movimento é realizado, inclinação do plano de locomoção e até mesmo o próprio metabolismo do corpo que dependendo do peso, altura e massa corporal da pessoa poderão apresentar consumos diferentes para um mesmo movimento. Como a órtese Ortholeg realiza movimentos graças aos atuadores elétricos a melhor forma de medir o consumo energético é utilizado sensores de corrente elétrica. Para realizar a medição do consumo energético da órtese, foi desenvolvida uma placa de aquisição de dados que usa sensores de corrente e um microcontrolador (Arduino Mega) que converte os valores analógicos gerados pelos sensores em dados digitais. Os dados coletados são enviados para o computador via cabeamento USB. A Figura 3 apresenta a arquitetura da placa de aquisição desenvolvida Figura 3. Arquitetura básica do sistema de medição de corrente Para a captação da corrente elétrica foi utilizado um sensor de corrente elétrica, baseado no efeito Hall, capaz de medir correntes elétricas entre ± 30 amperes. Este sensor produz uma tensão elétrica de saída proporcional à corrente medida na seguinte relação: 185mV/A. O microcontrolador da placa converte o sinal analógico de saída do sensor em sinal digital que por sua vez é enviado via conexão USB para o computador embarcado. O computador embarcado recebe as informações da corrente de cada motor e ao mesmo tempo a posição angular de cada junta, com isso é possível gerar gráficos que mostram a variação da corrente elétrica e a variação dos ângulos das juntas em função do tempo. Isso torna possível identificar em quais etapas dos movimentos o gasto energético é maior ou menor, com isso é possível elaborar estratégias para diminuir o consumo como, por exemplo, usar a gravidade a favor na hora de sentar. Considerando que a eficiência máxima dos motores (η) é da ordem de 91%, segundo o fabricante, e a tensão nominal nos atuadores (Vg) é constante, a variação média da corrente elétrica i(t) nos atuadores e a diferença entre os tempos de coleta (Δt), representados na Equação 1 é possível determinar o consumo energético dos movimentos. Onde Pg(t) é a potência, produto da corrente com a tensão constante. (1) Como dito anteriormente, a órtese Ortholeg é capaz de realizar vários movimentos, uns mais simples, como sentar e levantar e outros mais complexos como subir e descer degraus. A princípio, este trabalho irá determinar o consumo energético do movimento de sentar e levantar, pois é exatamente nesse caso onde os torques de acionamento das articulações são maiores, conforme foi apresentado em (Araújo, 2010). Os movimentos de sentar e levantar foram realizados com um adulto saudável do sexo masculino com 55 kg de massa, altura 1,67 metros e 23 anos de idade. Foram utilizadas duas muletas para auxiliar na realização dos movimentos. Inicialmente o usuário foi instruído a não realizar esforços excessivos com as muletas e se possível nenhum esforço dos membros inferiores, na finalidade de se aproximar ao máximo de um usuário com paraplegia. Foram realizados 10 experimentos para o movimento de sentar e levantar. A Ortholeg realiza os movimentos de sentar e levantar em aproximadamente 2,9 e 3,2 segundos, respectivamente. Inicialmente os ângulos do joelho e quadril, na posição em pé, estão levemente flexionados com 5° e 15° respectivamente (ver Fig. 4), quando a órtese senta esses ângulos passam um pouco de 60°. Figura 4 – Variação dos ângulos das juntas do quadril e dos joelhos em função do tempo: a) movimento de sentar e b) movimento de levantar Em seguida a órtese levantou, retornando os ângulos para as posições angulares de 5° e 15° novamente. A Fig. 5 mostra a variação dos ângulos do joelho e quadril para o movimento de levantar. Para cada movimento de sentar e levantar eram medidas as correntes elétricas dos 4 motores. Posteriormente esses valores foram colocados em uma planilha para o cálculo do consumo e das médias dos consumos para cada articulação e no final foram somados todos os consumos dos atuadores para obter o consumo total para o movimento de sentar e levantar. 5 RESULTADOS EXPERIMENTAIS As variações das correntes elétricas em função do tempo gasto para levantar ou sentar são apresentadas nesta seção. Foram realizados 10 experimentos para os movimentos de sentar e levantar, porém é apresentado somente um deles como exemplo. A Figura 5 mostra o comportamento da corrente elétrica nos atuadores do quadril esquerdo e do quadril direito. isolado de cada atuador elétrico nas juntas do quadril esquerdo e direito e joelho esquerdo e direito. A tabela 1 apresenta a soma dos consumos dos atuadores do quadril e joelhos para cada tipo de movimento e o consumo total (soma dos consumos do joelho e quadril) também para cada movimento. Tabela 1 – Consumo energético da órtese Ortholeg Consumo energético para o movimento de sentar (mWh) Consumo energético para o movimento de levantar (mWh) Consumo energético para o movimento de sentar e levantar (mWh) Atuadores do quadril 28,47 22,67 51,14 Atuadores dos joelhos 33,47 27,81 61,58 Consumo energético da órtese 62,24 50,47 112,72 Soma da média do consumo energético dos atuadores 6 DICUSSÃO Figura 5 – Variações da corrente elétrica no atuador elétrico em função do tempo dos movimentos de sentar e levanter: a) quadril esquerdo e b) quadril direito A Figura 6 apresenta respectivamente o comportamento da corrente elétrica nos atuadores do joelho esquerdo e joelho direito para os experimentos de sentar e levantar. Em virtude do usuário ter utilizado muletas para auxiliar no movimento de levantar, o consumo foi menor do que para o movimento de sentar. O espera- do era que o consumo fosse maior no movimento de levantar, haja vista que os esforços são realizados contra a força peso. O mesmo estudo poderá ser realizado sem a pre- sença de um usuário, ou seja, a órtese Ortholeg reali- zando os movimentos de sentar e levantar sem carga, dessa forma não existe força realizada pelo usuário com as muletas. Todavia o objetivo final desse traba- lho era medir o consumo em condições reais de uso. 7 CONCLUSÃO Figura 6 – Variações da corrente elétrica no atuador elétrico em função do tempo dos movimentos de sentar e levanter: a) joelho esquerdo e b) joelho direito A partir dos dados da corrente foi então calculado o consumo energético com base na Equação 1. A tensão em cada motor é de aproximadamente 24V. Foi possível observar o comportamento O sistema de medição de corrente elétrica apresentado neste trabalho é uma ferramenta desenvolvida para analisar como os atuadores consomem ener- gia durante a realização dos movimentos. A placa construída mede simultaneamente a corrente de quatro atuadores, muito embora seja possível expandir esse número caso seja necessário futuramente. Com a variação das correntes elétricas foi possível saber o consumo energético de cada atuador e de cada perna para ambos os movimentos e também o consumo total real. Futuramente espera-se determinar a forma como a corrente elétrica varia para outros movimentos mais complexos e em seguida traçar ações que visam diminuir o consumo de energia desses dispositivos, tornando-o mais eficientes. 8 REFERÊNCIAS M. Araujo, P. Alsina, V. Cavalcanti Roza, and N. Bastos Melo, “Powered orthosis ortholeg: Design and development,” Latin America Transactions, IEEE (Revista IEEE America Latina), vol. 13, no. 1, pp. 90–95, Jan 2015. Araújo, M.V., Alsina, P.J., Medeiros, A.A.D., Araújo, F.M.U., Pinheiro, J.P., Domingos, E.C. and Silva, J.S., 2009. “Development of an active orthosis prototype for lower limbs”.In 20th International Congress of Mechanical Engineering.Gramado, Brazil. Araujo, M.V.; da Silva, G.N.; Soares, L.C.; Alsina, P.J., "Ortholeg Project - Development of an Active Orthosis Prototype for Lower Limbs," Robotics Symposium and Latin American Robotics Symposium (SBR-LARS), 2012 Brazilian , vol., no., pp.239,244, 16-19 Oct. 2012. doi: 10.1109/SBR-LARS.2012.46 Araújo, M.V., Alsina, P.J., “Determinação do torque mínimo de acionamento de um atuador elétrico usado nas articulações de uma Órtese ativa para os membros inferiores,” em VI Congresso Nacional de engenharia Mecânica, Campina GrandePB, Brasil, Agosto 2010. Araújo, M.V., Alsina, P.J., Medeiros, A.A.D. and Soares, L.C., 2011. “Comparison of the movements realised by an active orthosis for lower limbs”. In 21th International Congress of Mechanical Engineering. Natal, Brazil.Argo. Disponível em: http://www.argomedtec.com/. Acesso em 20/02/2014. Dollar, A.M.; Herr, H., "Active Orthoses for the Lower-Limbs: Challenges and State of the Art," Rehabilitation robotics, 2007. ICORR 2007. IEEE 10th International Conference on , vol., no., pp.968,977, 13-15 June 2007. doi: 10.1109/ICORR.2007.4428541.Ekso. Disponível em: http://eksobionics.com/. Acesso em 21/02/2014. Low, K.H., "Robot-assisted gait rehabilitation: From exoskeletons to gait systems," Defense Science Research Conference and Expo (DSR), 2011 , vol., no., pp.1,10, 3-5 Aug. 2011. doi: 10.1109/DSR.2011.6026886 H. Quintero, R. Farris, and M. Goldfarb, “Control and implementation of a powered lower limb orthosis to aid walking in paraplegic individuals,” in Rehabilitation Robotics, 2011 IEEE International Conference on, 29 2011-july 1 2011, pp. 1 – 6. Neuhaus, P.D.; Noorden, J.H.; Craig, T.J.; Torres, T.; Kirschbaum, J.; Pratt, J.E., "Design and evaluation of Mina: A robotic orthosis for paraplegics," in Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on , vol., no., pp.1-8, June 29 2011-July 1 2011 Pons, J. L. (ed) (2008) Front Matter, in Wearable Robots: Biomechatronic Exoskeletons, John Wiley & Sons, Ltd, Chichester, UK. doi: 10.1002/9780470987667.fmatter.Rex. Disponível em: http://www.rexbionics.com/. Acesso em 21/02/2014. Strickland ,Eliza, “Good-bye, wheelchair,” Spectrum, IEEE, vol. 49, no. 1, pp. 30–32, 2012.
Baixar