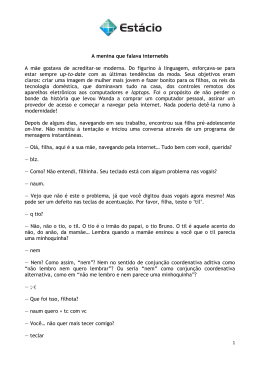
Exemplos de movimentos não-retilı́neos MÓDULO 1 - AULA 11 respectivamente, o movimento de projéteis, o movimento circular e o movimento cicloidal. Como de costume, encontra-se no final da aula uma lista de problemas propostos. Nela, você terá de fazer tanto demonstrações de resultados utilizados no texto da aula quanto aplicações numéricas do que foi discutido na mesma. Sugerimos que você resolva o maior número possı́vel de problemas dessa lista, tarefa que irá ajudá-lo a se familiarizar cada vez mais com a notação vetorial. O movimento de projéteis Já estudamos anteriormente o movimento vertical de um corpo que está próximo à superfı́cie terrestre e cujas velocidades, durante seu movimento, são pequenas o suficiente para desprezarmos a resistência do ar. Nessas circunstâncias, você aprendeu que qualquer corpo descreve um MRUV, com uma aceleração de módulo igual a 9, 8m/s2 e apontando sempre para o centro da Terra (esta direção determina a vertical local). Esse tipo de movimento, como vimos na aula 7, é um caso particular do chamado movimento de queda livre. Particular porque pode-se (e deve-se) estudar também movimentos de queda livre levando-se em consideração a resistência do ar. Nesta seção, iremos analisar movimentos um pouco mais gerais do que os de queda livre estudados na aula 7, mas ainda com as restrições de proximidade da Terra e resistência do ar desprezı́vel. Nossa generalização consistirá em considerar movimentos não retilı́neos, ou seja, movimentos nos quais a partı́cula possui tanto uma componente vertical de velocidade como uma componente horizontal. Ou seja, consideraremos nesta seção movimentos com lançamentos oblı́quos, comumente chamados movimentos de projéteis. Uma propriedade do movimento que pretendemos estudar, e de qualquer outro cuja aceleração da partı́cula em estudo seja constante, é que a partı́cula descreve uma trajetória plana, isto é, seu movimento ocorre sempre num mesmo plano do espaço (no problema 2, você é convidado a demonstrar esse resultado). No movimento de projéteis a ser estudado, a aceleração é igual à aceleração da gravidade, sempre com o mesmo módulo, com a direção vertical e apontando para baixo. Por conveniência, vamos escolher os eixos cartesianos de modo que o movimento ocorra no plano OX Y. 239 CEDERJ Exemplos de movimentos não-retilı́neos Suponha então que uma partı́cula seja lançada do ponto P0 (x0 , y0, 0) com uma velocidade de módulo igual a v0 := |v0 |. Seja θ0 o ângulo entre a sua velocidade no instante do lançamento (t0 ) e o vetor unitário ux relativo ao eixo horizontal OX . A Figura 11.1 ilustra esse lançamento. Y v0 y0 P0 O θ0 x0 X Fig. 11.1: Projétil lançado de um ponto P0 (x0 , y0 ) com velocidade v0 . Nosso objetivo aqui é encontrar a função-movimento do projétil, conhecida a sua aceleração, que no caso é constante e dada por a = −g uy . Conseqüentemente, utilizando a equação (11.11), obtemos: 1 r = r0 + v0 (t − t0 ) − g(t − t0 )2 uy . 2 (11.13) Substituindo na equação anterior as expressões de r0 e v0 em termos de suas componentes cartesianas, r0 = x0 ux + y0 uy v0 = vx0 ux + vy0 uy , (11.14) e reagrupando convenientemente os termos, obtemos: 1 r = (x0 + vx0 (t − t0 ) ux + y0 + vy0 (t − t0 ) − g(t − t0 )2 uy . 2 (11.15) Identificamos, então, as componentes cartesianas do vetor posição do projétil num instante genérico: x = x0 + vx0 (t − t0 ) (11.16) y = y0 + vy0 (t − t0 ) − 12 g(t − t0 )2 . CEDERJ 240 Exemplos de movimentos não-retilı́neos MÓDULO 1 - AULA 11 Uma vez que foram dados o módulo da velocidade inicial e o ângulo θ0 entre v0 e ux , devemos expressar as componentes vx0 e vy0 em termos dessas quantidades. Usando os conceitos de projeção adquiridos na aula 9, temos: vx0 = v0 cos θ0 (11.17) vy0 = v0 sen θ0 . Sem perder o caráter geral de nossa discussão, escolheremos t0 = 0s (lembre-se de que podemos zerar o nosso cronômetro no instante que mais nos convier). Com isso, as equações estabelecidas em (11.16) são reescritas na forma: x = x0 + v0 cos θ0 t (11.18) y = y0 + v0 sen θ0 t − 12 g t2 . Desejamos saber agora qual é a trajetória descrita pelo projétil. Na verdade, as equações presentes em (11.16) já nos dão essa trajetória, uma vez que, dado um instante de tempo t qualquer, elas fornecem as coordenadas do projétil, ou seja, o ponto onde ele se encontra nesse instante. Como ambas as coordenadas são escritas em função de um parâmetro (no caso, o tempo t), tais equações são chamadas equações paramétricas da trajetória. No entanto, muitas vezes é conveniente relacionar diretamente as coordenadas cartesianas da partı́cula em movimento, obtendo assim a equação cartesiana de sua trajetória. A fim de eliminar o tempo das equações (11.16), escrevemos, a partir da primeira delas, a seguinte relação: t= x − x0 . v0 cos θ0 Subsitutindo essa expressão na segunda equação em (11.16), obtemos: y = y0 + tanθ0 (x − x0 ) − g 2v02 cos2 θ0 (x − x0 )2 . (11.19) Essa é a equação cartesiana da trajetória do projétil. Trata-se de uma parábola, de eixo vertical, e que passa pelo ponto P0 (x0 , y0 , 0). Note ainda que a tangente a essa parábola, passando por P0 , tem a mesma direção de v0 , como era de se esperar (veja o problema 3). É muito comum escolher a origem dos eixos cartesianos no ponto de lançamento do projétil, principalmente quando ele é lançado do solo. Nesse caso, a equação cartesiana de sua trajetória se reduz a: y = tanθ0 x − g 2v02 cos2 θ0 x2 . (11.20) 241 CEDERJ Exemplos de movimentos não-retilı́neos Caso π/2 < θ0 < π, o projétil atingirá o solo no ponto de coordenadas x = −A e y = 0. Vejamos agora como calcular a altura máxima atingida pelo projétil e a que distância do ponto de lançamente ele atinge o solo. Essa distância é chamada alcance do projétil e será denotada por A. Portanto, se o ângulo de lançamento do projétil for um ângulo agudo (θ0 < π/2), podemos dizer que o projétil atinge o solo no ponto de coordenadas x = A e y = 0. Com tudo isso em mente, calculemos, inicialmente, o instante em que o projétil atinge o ponto mais alto de sua trajetória, instante que denotaremos por tm . Por definição, nesse instante, a velocidade vertical do projétil é nula, de modo que: v0 senθ0 v0 senθ0 − gtm = 0 −→ tm = . g Substituindo esse resultado na segunda equação escrita em (11.18), obtemos a altura máxima atingida pelo projétil: ym = v02 sen2 θ0 . 2g (11.21) O alcance pode ser determinado simplesmente calculando-se qual é a coordenada x do projétil no instante em que ele retorna ao solo. Do mesmo modo que no movimento de queda livre, aqui também o tempo gasto pelo projétil para atingir a altura máxima (tempo de subida) é igual à metade do tempo total de vôo. Desse modo, o tempo de vôo é dado por: A demonstração desse resultado é totalmente análoga àquela feita no estudo da queda livre; o tempo de vôo só depende da componente vertical da velocidade no instante do lançamento (vy0 ) e da aceleração da gravidade (g), não importando com que rapidez o projétil se movimenta horizontalmente. No entanto, é importante mencionar que essa independência dos movimentos horizontal e vertical, em geral, deixa de ser válida nos casos mais realistas, nos quais a resistência do ar influencia o movimento. tA = 2tm = 2v0 senθ0 . g Substituindo esse resultado na primeira equação escrita em (11.18), obtemos A = = 2v02 senθ0 cosθ0 = g v02 sen(2θ0 ) , g (11.22) onde usamos a identidade trigonométrica sen(2α) = 2 senα cosα. A partir dessa expressão para o alcance, é imediato concluir que, dentre todos os projéteis lançados com velocidades iniciais de mesmo módulo, mas com ângulos de lançamento diferentes, terá o maior alcance aquele que for lançado com θ0 = π/4, isto é, com 45o. Isso ocorre simplesmente porque sen(2θ0 ) tem um máximo em 2θ0 = π/2. Além disso, como sen(π/2) = 1, o alcance máximo de um projétil lançado com velocidade inicial de módulo v0 é dado por Am = v02 /g. Para lançamentos feitos com o mesmo valor de v0 , fica também evidente que os alcances correspondentes àqueles feitos com ângulos de lançamento complementares são exatamente iguais. Em outras palavras, os alcances de projéteis CEDERJ 242 Exemplos de movimentos não-retilı́neos MÓDULO 1 - AULA 11 > lançados com ângulos iniciais de 45o + α e 45o − α, com 0 < α < 45o , são os mesmos, como ilustra a Figura 11.2. Demonstre esse resultado! > > Fig. 11.2: Alcance máximo e alcances para ângulos complementares (todos os lançamentos feitos com o mesmo v0 ). Vale a pena finalizar esta seção comentando que o tipo de movimento que acabamos de analisar aparece em outras situações de interesse em fı́sica. Por exemplo, partı́culas carregadas na presença de campos eletrostáticos uniformes sofrem acelerações constantes. Inclusive, as condições idealizadas em que supusemos não haver resistência do ar podem se cumprir de uma forma mais rigorosa com partı́culas atômicas ou subatômicas (como os elétrons) do que no caso de projéteis, pois tais partı́culas podem ser lançadas em regiões de alto vácuo (diminuindo, assim, praticamente a zero a resistência do ar). Justamente movimentos desse tipo estavam presentes nas experiências que levaram J.J. Thomson a descobrir o elétron em 1897. J.J. Thomson utilizou um aparelho conhecido como tubo de raios catódicos, uma espécie de versão primitiva dos modernos tubos de osciloscópio ou de televisão. Revendo o movimento circular Nesta seção, discutiremos novamente o movimento circular já tratado na aula 9, com o objetivo de rever algumas de suas caracterı́sticas e aprender alguns aspectos novos a respeito desse movimento. Em particular, deduziremos novamente a fórmula para a aceleração centrı́peta no caso de um MCU utilizando apenas argumentos geométricos. 243 CEDERJ
Baixar