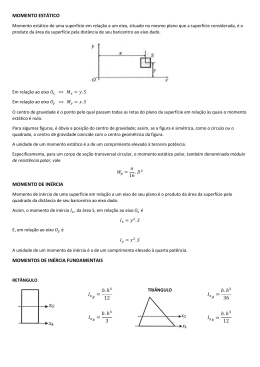
Tensor de inércia Há outras grandezas associadas à geometria e à massa específica que é necessário (quando lidarmos com dinâmica) calcular. São integrais, em volume, de produtos das coordenadas pela massa específica, que se arrumam no chamado tensor de inércia: ou, (onde é o operador designado como como produto exterior, exterior onde cada elemento do vector é multiplicado por cada elemento do outro vector gerando-se se assim uma matriz) Trata-se se de um tensor simétrico de 2ª ordem cuja forma matricial é: - 57 - As componentes diagonais designam-se designam se “momentos de inércia” e tomam valores positivos (trata-se se de integrais de quadrados das distâncias). As componentes não diagonais são os produtos de inércia. Podem ser <,> ou = 0. São iguais a 0, em relação a um determinado terminado par de eixos, quando um desses eixos é um eixo de simetria do corpo. No contexto da Dinâmica interessa calcular os momentos e produtos de inércia “de massas”, massas” mede-se se de facto a “inércia”, a “resistência”, a rotações das massas. massas Daí que a integração ração seja feita num elemento infinitesimal de massa. No contexto da Resistência de Materiais interessa calcular os momentos e produtos de inércia “de secções”, secções” trata--se de uma propriedade da secção tal como a área. área. Neste caso a integração é feita num elemento mento infinitesimal de área. - 58 - Assume, como veremos mais tarde, especial importância a definição do tensor/matriz de inércia de um corpo rígido em relação a um ponto O. Componentes dos vectores de posição e distâncias envolvidas nas definições dos momentos e dos produtos de inércia: O momento de inércia de um corpo em relação a um eixo qualquer é o integral (a soma) dos produtos das massas (dM) das várias partículas do sistema pelos quadrados das respectivas distâncias dλ ao referido eixo: - 59 - Num referencial ortonormado tem-se: com as componentes da diagonal principal a serem os momentos de inércia em relação a cada um dos eixos : (notar que estes termos são sempre positivos) e os simétricos dos termos não diagonais a serem os produtos de inércia (em relação a pares de eixos): (notar que estes termos não têm que ser positivos) 3D - Para que todos os produtos de inércia de um corpo (em relação a um referencial ortonormado num ponto) se anulem basta que dois planos coordenados sejam planos de simetria. - 60 - Particularização para o caso plano: No caso plano as expressões para as componentes da matriz de inércia simplificam-se significativamente: todos os outros produtos de inércia são nulos. 2D - o produto de inércia de um corpo (em relação a um referencial ortonormado num ponto) é nulo se este tiver um plano de simetria. - 61 - - 62 - Determinação de momentos de inércia (de massa) O momento de inércia em relação a um eixo toma a forma: I = ∫ r 2 dM M ou seja: I = ∫ r 2 ρ ( x, y, z )dV V Quando a massa específica é constante é possível simplificar: I = ρ ∫ r 2 dV = ρ ∫∫∫ r 2 dxdydz V V Particularizando para o termo I xx = ρ ∫ xf xi (∫∫ ( y A 2 I xx : ) + z 2 )dydz dx Se esse eixo corresponder ao de uma dimensão em relação à qual a secção transversal A não varie, por exemplo, a situação de uma barra de secção transversal constante axb e de comprimento L: - 63 - então ( ) I xx = ρL ∫∫ ( y + z )dydz = ρL ∫ I xx = 2 2 A b/2 ∫ a/2 −b / 2 − a / 2 ( y 2 + z 2 )dydz 1 ρLab(a 2 + b 2 ) 12 Notar que ρLab é a massa total da barra, pelo que se poderia escrever: I xx = M 1 2 (a + b 2 ) 12 Para os momentos segundo os outros eixos o procedimento é idêntico: I yy = ρb ∫ L/2 ∫ a/2 − L / 2 −a / 2 I yy = ( x 2 + z 2 )dxdz 1 1 ρbaL(a 2 + L2 ) = M (a 2 + L2 ) 12 12 - 64 - Secções circulares: Se a secção transversal é, por exemplo, um círculo de raio R então é conveniente utilizar coordenadas polares: - 65 - Admita-se agora que a secção transversal é muito pequena, a situação típica para barras muito finas) Nessas condições, basta considerar na expressão anterior que a ≈ 0, obtendo-se: I yy = M 1 2 L 12 Caso não tivéssemos obtido a expressão genérica para barras prismáticas poderíamos efectuar o integral tendo já em conta a M dM = dx : esbelteza da barra, quer dizer, admitir L M 2 1 2 I yy = ∫ x dx = M L −L / 2 L 12 L/2 - 66 - Veja-se agora o caso do momento de inércia calculado não para o centro da barra mas para um eixo paralelo a y centrado numa das extremidades da barra: I y'y' = ∫ L 0 M 2 1 x dx = ML2 L 3 Vê-se assim que o momento de inércia aumenta de uma quantidade ∆: I y ' y ' = I yy + ∆ 1 1 1 L ∆ = ML2 − ML2 = ML2 = M 3 12 4 2 2 Para este caso é fácil de ver que o aumento do momento de inércia é o produto da massa total pelo quadrado da distância entre os eixos y e y' . Em geral não é tão fácil de ver mas este resultado é aplicável a todos os casos, ou seja, o momento de inércia de um corpo rígido em relação a um eixo com uma determinada direcção é mínimo quando o eixo passa no centro de massa e aumenta à medida que o eixo se afasta do centro de massa - 67 - Tensor de inércia referido a eixos paralelos Conhecidas as componentes do tensor de inércia do corpo rígido no respectivo centro de massa G pode, com uma operação simples, obter-se as componentes do mesmo tensor agora referido a um referencial de eixos paralelos aos iniciais noutro ponto qualquer. Essa operação não é mais que a aplicação do Teorema de Lagrange-Steiner ou teorema dos eixos paralelos. Sejam dois sistemas de eixos paralelos um dos quais está centrado no centro de massa G e o outro é um ponto genérico O. Conhecidas as componentes do tensor de inércia em G podem obter-se as correspondentes componentes em O sobrepondo aos valores em G o produto da massa total do corpo: • pelo quadrado da distância entre os eixos paralelos, no caso dos momentos de inércia: - 68 - • pelo produto das distâncias entre os eixos paralelos envolvidos, no caso dos produtos de inércia: Na sua forma mais sintética: Este teorema pode ser usado também para encontrar o tensor de inércia num ponto genérico P conhecido o tensor no ponto O que não o centro de massa. Basta aplicar o teorema dos eixos paralelos duas vezes. O Teorema de Lagrange-Steiner simplifica significativamente o cálculo de momentos de inércia mesmo quando se recorre à integração directa. - 69 - - 70 -
Baixar