PESQUISA
Problema rotodinâmico de autovalor (parte 2):
sistema giroscópico amortecido
Victor Prodonoff *e Adhemar Castilho**
Resumo
Apresenta-se um novo método para o desacoplamento das equações de movimento de um sistema
rotodinâmico amortecido. São utilizadas as matrizes de massa, rigidez, amortecimento e giroscópica,
no seu estado original de espaço padrão (n x n), não sendo necessária a duplicação das matrizes
para o espaço estado (2n x 2n). São usados no desacoplamento os autovetores complexos conjugados e biortogonais da matriz soma das matrizes giroscópica e de amortecimento. As matrizes de
massa e rigidez são simétricas e as matrizes giroscópica e de amortecimento são não simétricas.
Palavras-chave
Autovalor, autovetor, efeito giroscópico, amortecimento modal, desacoplamento, sistemas amortecidos, sistemas giroscópicos amortecidos.
Introdução
Em artigo anterior[1] dos autores, foi mostrado que as matrizes modais, [U] da matriz giroscópica G e [V] de sua transposta GT= -G, formam
um conjunto biortogonal [V]T [U] = [I] que, usadas
em conjunto, desacoplam um sistema não amortecido com equações giroscópicas. Neste artigo
nos propomos a mostrar que os autovetores
biortogonais [U] e [V] da matriz modal da soma
de [C] + [G] = [D], sendo [C] a matriz de amortecimento, desacoplam as equações do sistema
giroscópico amortecido. A proposta é válida
quando as matrizes de massa M e de rigidez K
são simétricas, como no caso largamente empregado dos elementos finitos.
Nos casos em que o amortecimento é relativamente baixo, como em mancais de rolamento, a solução do problema de autovalor pode ser
simplificada, com a ajuda do conceito de amortecimento proporcional.[3] Nesses casos a matriz
de amortecimento C é substituída por uma combinação linear entre M e K, fornecendo a equação matricial
..
.
.
[M]{q}+([αM+βK]) {q} + Ω[G] {q} + [K]{q} = {Q(t)}
(1)
*
**
4
Ph. D., Cefet/RJ – Centro Federal de Educação Tecnológica do Rio de Janeiro.
D.Sc., Petróleo Brasileiro SA, Petrobras.
2o QUADRIMESTRE DE 2008
sendo q = vetor de deslocamento, Q = vetor de
forças, α e β são escalares convenientemente
escolhidos de modo a satisfazer o amortecimento em freqüências previamente escolhidas.[3] O
mesmo método usado no artigo anterior[1] pode
ser aqui usado, isto é, utilizam-se as matrizes
biortogonais de G para desacoplar o sistema.
No caso geral de amortecimento em mancais
de deslizamento, ou amortecimento localizado,
não podemos mais considerar a matriz C como
simétrica, e, assim, o método indicado acima
não produzirá o desacoplamento desejado das
equações.
Desacoplamento das Equações de Movimento
– Sistema Giroscópico Amortecido
Como a matriz [D] não é simétrica, considere
o sistema adjunto formado pela matriz transposta
de [D].
[M]{&q&} + [D]T {q& } + [K ] {q} = {0} ,
(4)
A solução harmônica {q} = {v}.e.i.ω.t, sendo
{v} o vetor de deslocamentos modais de [D]T,
para a freqüência ω, fornece
− ω2 [M] {v} + iω.[D] {v} + [K ]{v} = {0}
.
T
(5)
Considerando duas soluções distintas: i, j
sendo i ≠ j, as equações (3) e (5) fornecem:
− ωi .[M].{u i } + i.ωi .[D].{u i } + [K ].{ui } = {0}
2
{ }
{ }
(6a)
{ }
− ω j [M] v j + iω j .[D] v j + [K ] v j = {0}
2
a) Diagonalização das matrizes do sistema
Nesta seção prova-se que os autovetores
adjuntos da matriz [D] = [C] + [G] desacoplam
as equações de um sistema rotodinâmico amortecido. As matrizes modais adjuntas [U] de [D],
e [V] de [D]T, além de diagonalizarem [D], também diagonalizam M e K.
A prova dessa propriedade é feita para um
modelo de n graus de liberdade, usando-se apenas matrizes (n x n), não sendo necessário converter o sistema para o espaço estado (2n x 2n).
Considere o sistema dinâmico representado pela
seguinte equação homogênea:
[M]{&q&} + ([C + G]) {q& } + [K ] {q} = {0} ,
[D] = [C + G]
(2)
A solução harmônica {q} = {u}.e.i.ω.t , sendo
{u} o vetor de deslocamentos modais de [D],
para a freqüência ω, quando substituída em (2),
fornece o sistema algébrico abaixo:
– ω2[M]. {u} + iω.[D]{u} + [K]{u} = {0}
(3)
T
(6b)
Pré-multiplicando (6a) por {vj}T e (6b) por
{ui}T, obtém-se:
2
{ }T [M]. {ui }+ iωi.{v j }T [D]{ui } + {v j }T [K]{ui } = 0
− ωi v j
(7a)
{ }
{ }
{ }
− ω j {ui } [M] v j + iω j .{ui } [D] v j + {ui } [K] v j = 0
(7b)
2
T
.
T
T
T
Cada parcela das equações (7a) e (7b) são
termos escalares, portanto iguais a seu transposto. Assim sendo, transpondo a equação (7b) e
dela subtraindo (7a), encontramos a relação:
(ω
i
2
2
){ } [M] {u }− i(ω − ω ){. v } [D]{u }+ 0 = 0
− ωj v j
T
.
T
i
i
j
j
i
(8)
uma vez que [M] = [M] e [K ] = [K ] ,
T
T
{ } { }T [M].T {ui } ;
e considerando que {ui }T [M]. v j = v j
{ui }T [K ]. {v j } = {v j }T [K ]. {ui } . Como {vj} e {uj} são
T
autovetores adjuntos de [D], portanto
{vj}T[D]{uj} = 0,
2o QUADRIMESTRE DE 2008
(9)
5
[V]T [M]. [U]{&η&}+ [V]T [D][U]{η&} + [V]T [K][U]{η} = [V]T {Q}
logo:
{v j }T [M]{ui } = 0
(15)
(10)
sendo:
Retornando à equação (7a) mostrada anteriormente, vemos que para todos os casos nos
quais i ≠ j, {vj}T[M]{ui} = 0 e {vj}T[D]{ui} = 0 serão
nulos, bem como
{v j }T [K ]{ui } = 0
[V ]T [D]. [U] = [λ]
[V ]T [M]. [U] = []I
(11)
Mostramos que os autovetores {ui} da matriz [D] e os autovetores {vj} de [D]T desacoplam
as equações do sistema giroscópico amortecido.
Dessa forma fica provado que os autovetores
adjuntos {u} de [D] e {v} de [D] T, além de
diagonalizarem D, também diagonalizam M e K
e desacoplam as equações de movimento.
b) Equações modais
[V]T [K][U] = [k]
Matriz com autovalores de [D]
(16a)
Matriz de massa normalizada
(16b)
Matriz de rigidez diagonalizada
(16c)
Substituindo os valores acima na equação,
teremos:
[]I {η&&} + [λ]{η& } + [k]{η} = [V]T {Q}
(17)
Este sistema é formado de equações desacopladas do tipo
&& i + λ i η& i + κ i ηi = fi ;
η
Partindo da equação matricial
[M]{&q&} + [D]{q& } + [K ] {q} = {Q}
fi = {v}i {Q} ⇒ i = 1,2,3...,n
T
(12)
onde [M] = [M]T, [K] = [K]T, [D] = [C + G]
e [D] ≠ [D] T e fazendo a transformação linear
q = [U]{η}
(14)
Pré-multiplicando (14) por [V]T, onde [V] é
a matriz dos autovetores de [D]T, obtém-se o
sistema desacoplado mostrado a seguir
6
2o QUADRIMESTRE DE 2008
Dessa forma fica alcançado o objetivo de
desacoplar as equações simultâneas de movimento. Isto é conseguido em virtude de os autovetores adjuntos de [D] são os mesmos de M, D
e K, conforme demonstrado em (1).
(13)
sendo [U] a matriz dos autovetores de [D] e {η}
o vetor de variáveis modais, obtém-se o sistema
alternativo
[M]. [U]{η&&} + [D][U]{η& } + [K][U]{η} = {Q}
(17a)
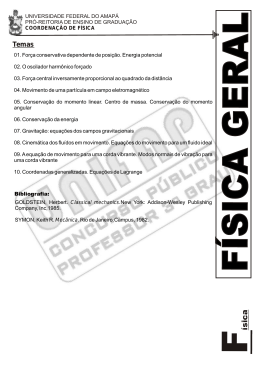
Exemplo literal
A investigação da solução de um problema
giroscópico amortecido, em sua forma padrão,
será feita por intermédio da observação no plano
XY, do movimento de uma massa m com reação
elástica k e submetida a um amortecimento
viscoso c, que incorporem as propriedades
giroscópicas e de amortecimento ao modelo físico mostrado a seguir, de forma independente.
a) Autovalores e autovetores da matriz giroscópica
amortecida D
Considere o problema de autovalor da
matriz [D]:
⎛⎡ c
u} = {0} ⇒ ⎜⎜⎢2 m Ω
[[D] −λ[]I ] {{u}
⎝⎣
⎡ c−λ
⇒ ⎢2 mΩ−0
⎣
−2 m Ω⎤ ⎡1 0⎤⎞ ⎧u1⎫ ⎧0⎫
⎥−λ..⎢ ⎥⎟ ⎨ ⎬ ⎨ ⎬
0 ⎦ ⎣0 1⎦⎟⎠ ⎩u2⎭= ⎩0⎭ ⇒
−2 mΩ −0⎤⎧u1⎫ ⎧0⎫
⎥.⎨ ⎬=⎨ ⎬
0−λ ⎦⎩u2⎭ ⎩0⎭
(23)
Figura 1 – Exercício giroscópico amortecido.
que fornece
As matrizes representativas desse sistema são:[4]
.
.
−2 m Ω⎤ ⎧x&⎫ ⎡K− mΩ2
⎡m 0⎤ ⎧&x&⎫ ⎡ c
0 ⎤⎧x⎫ ⎧0⎫
⎥⎨ ⎬ = ⎨ ⎬
⎢
⎥ ⎨&&⎬+ ⎢
⎥ ⎨&⎬+ ⎢
0 ⎦ ⎩y⎭ ⎣⎢ 0
K−mΩ2⎦⎥⎩y⎭ ⎩0⎭
⎣0 m⎦ ⎩y⎭ ⎣2 m Ω
⎡ c − λ − 2mΩ⎤
⎥=0
−λ ⎦
⎣
Det. ⎢2mΩ
(24)
A equação característica
⇒ λ2 − cλ + 4m 2 Ω 2 = 0 tem as raízes
(18)
(25)
2
λ .1,2 =
⎧ u1 ⎫
⎧x ⎫
Trocando ⎨ ⎬ por {q} = ⎨u ⎬
y
⎩ 2⎭
⎩ ⎭
(19)
C CRIT. = 4mΩ ;
.
⎡c 0 ⎤
T
e sendo [C ] = ⎢
⎥ = [C ] ;
⎣0 0 ⎦
[G] = ⎡⎢
0
⎣2mΩ
&&
u
⎩u2⎭
u&
⎩u2⎭
(20)
− 2mΩ ⎤
⎥
0 ⎦
u
⎩u2⎭ ⎩0⎭
ξ = ξ rr =
&} + [K].{q} = {0}
⇒ [M].{&q&} + [D].{q
⎣2m Ω
Ω
ωrr
(27)
2
c
2 2 ⎛c⎞
λ.2 = − iq , onde q= 4.m .Ω −⎜ ⎟ ,
2
⎝2⎠
c
c
=
4Mrr ωrr C CRIT ⇒ fator de amortecimento modal
(29)
(21)
A matriz giroscópica amortecida
c
c
λ.1 = +iq;
2
rr =
(26)
(28)
[M].⎧⎨&&1⎫⎬ + [D].⎧⎨&1⎫⎬ + [K].⎧⎨ 1⎫⎬ = ⎧⎨0⎫⎬ ⇒
[D] = [C] + [G] = ⎡⎢
c
⎛c⎞
± ⎜ ⎟ − 4.m2. Ω2
2
⎝2⎠
.
− 2m Ω ⎤
T
⎥ ≠ [D ] (22)
0 ⎦
é não simétrica, e, por causa disto, um novo método de desacoplamento é apresentado.
Portanto os autovalores de D são complexos conjugados. Expandindo (23), obtemos um
sistema homogêneo de equações algébricas nas
incógnitas dos autovetores u1 e u 2
⎧(c − λ).u1 − 2m Ω u2 = 0
⎨
⎩ 2 m Ω. u1 − λ u 2= 0
(30a,b)
2o QUADRIMESTRE DE 2008
7
Substituindo inicialmente o autovalor
c
λ.1 = +iq em (30a) e arbitrando u 2 =1 encontra2
Equação característica ⇒ λ2 − cλ + 4m 2 Ω 2 = 0 ,
a mesma da matriz D.
c
c
Substituindo λ1 = + iq e λ 2 = − iq em
2
2
mos o autovetor:
2mΩq ⎫
⎧ m.c.Ω
+ i.
⎪
⎪ ⎧a + ib⎫
2
2
2
2
c
c
⎨
⎬= ⎨
+
+
q
q
⎬
{u}1 = ⎪ 2
2
⎪ ⎩ 1 ⎭
1
⎩
⎭
( )
( )
(34a) e arbitrando v 2 =1 nos dois casos, encontramos os autovetores {v}1 e {v}2
(31)
2 mΩ q ⎫
⎧ − m .c. Ω
− i.
⎪ 2
⎪ ⎧− a − ib⎫
2
c + q2
c + q2 ⎬ ⎨
⎨
⎬
=
2
1=⎪ 2
⎪ ⎩
1 ⎭
1
⎩
⎭
Substituindo igualmente o autovalor
c
λ.2 = −iq em (30a) e arbitrando u 2 =1, encontra2
( )
( )
(32)
Podemos mostrar que esses autovetores
[u}1 e {u}2 não são ortogonais:
m.c.Ω
( 2)
(33)
A não ortogonalidade dos autovetores da
matriz D é plenamente esperada, na medida em
que essa matriz é não simétrica.
É importante destacar que a operação
[U]T [D][U] não diagonaliza a matriz D.
b) Determinação dos autovetores adjuntos de D
⎡ c −λ
⎣
2 m Ω⎤
⎥ =0 ⇒
−λ ⎦
8
2o QUADRIMESTRE DE 2008
2
+q
2
2mΩq
( 2)
c
2
+q
2
=
=
⎡
[U] = ⎢ξ + i
⎣⎢
⎡
⎣⎢
(34a,b)
(36)
m.c.Ω
4m Ω
2
2
2m.Ωq
4m 2 Ω 2
=
c
C CRIT.
(37)
=ξ
= 1− ξ2
(38)
(39)
A substituição de (38) e (39) em (31), (32),
(35) e (36) fornece a forma admensional das
matrizes dos autovetores [U] e [V].
1− ξ2 ξ − i 1− ξ2 ⎤
⎥;
1
1
⎦⎥
[V ] = ⎢− ξ − i
⎧(c − λ).v1 + 2 m Ω v2 = 0
⇒ ⎨ 2 m Ω.v + λ.v = 0
1
2
⎩
( )
(35)
Da mesma forma que no caso anterior, {v}1 e
{v}2 são complexos conjugados e não são ortogonais entre si. Mas vamos mostrar que existe a
biortogonalidade, ou seja, [v]T[U] é uma matriz
diagonal. Usaremos, a partir desse ponto, quantidades admensionais, como abaixo.
c
Det. [D]T = Det. ⎢− 2m Ω
( )
{v}
C CRIT. = 4mΩ ; Assim sendo
[U] = ⎡⎢a + ib a − ib⎤⎥ ⇒ [U ]T [U ] =
1 ⎦
⎣ 1
⎡(a2 − b2 + 1) + 2ia.b
⎤
a2 + b2 + 1
⎥
= ⎢
2
2
2
2
a + b +1
(a − b + 1) − 2ia.b⎦⎥
⎣⎢
( )
2mΩ q ⎫
⎧ − m .c. Ω
+ i.
⎪ ⎧− a + ib⎫
⎪
2
2
2
c
c
⎨
+
q
+ q2 ⎬ = ⎨
⎬
2
2=⎪ 2
⎪ ⎩
1 ⎭
1
⎭
⎩
mos o autovetor:
2 mΩ q ⎫
⎧ m.c.Ω
⎪ 2 2 −i. 2 2 ⎪ ⎧a − ib⎫
{u}2 = ⎨⎪ c2 +q c2 +q ⎬⎪ = ⎨ 1 ⎬
⎭
⎩
1
⎩
⎭
( )
{v}
1− ξ2
1
− ξ + i 1− ξ2 ⎤
⎥
1
⎦⎥
(40)
Podemos então verificar a biortogonalidade
existente entre [U] e [V].
[V]T[U] = [U]T[V] = 2⎢(1−ξ )−iξ 1− ξ
⎡
2
⎢⎣
2
0
⎤
0
2⎥
1− ξ + iξ 1− ξ ⎥
⎦
(40a)
( )
2
onde [U] é a matriz dos autovetores de [D] e {η}
o vetor de coordenadas modais, obtemos:
[M]. [U]{&η&} + [D][U]{η& } + [K][U]{η} = {0}
(42)
c) Desacoplamento das equações diferenciais
Pré-multiplicando por [V]T
Voltando à equação (21), fazendo a transfor& } e { &q&} = [ U]{ &η&}
mação linear {q} = [ U]{ η}, {q& } = [ U]{ η
[V]T [M]. [U]{&η&} + [V]T [D][U]{η& } + [V]T [K][U]{η} = {0}
(41)
(43)
Calculando cada um dos produtos das matrizes M, D e K, teremos:
⎡− ξ −i 1− ξ2 1⎤ ⎡m 0⎤ ⎡
ξ + i 1− ξ2 ξ −i 1− ξ2 ⎤
⎥ ⇒
[V ] [M][U] = ⎢⎢− ξ + i 1− ξ2 1⎥⎥ ⎢⎣0 m⎥⎦.⎢⎢ 1
⎥⎦
1
⎣
⎣
⎦
T
( )
⎤
⎡⎡
2
2⎤
0
⎥
⎢.⎢⎣1− ξ − iξ 1− ξ ⎥⎦
2m .⎢
⎥
⇒ [V ]T [M][U] =
⎢
0
.⎡1− ξ2 + iξ 1− ξ2 ⎤⎥
⎢⎣
⎥⎦⎦
⎣
( )
(44)
Procedendo de forma semelhante
⎡− ξ − i 1− ξ2 1⎤ ⎡ c
− 2 m Ω⎤ ⎡ξ + i 1− ξ2 ξ − i 1− ξ2 ⎤
⎥ ⇒
[V ] [D][U] = ⎢⎢− ξ + i 1− ξ2 1⎥⎥.⎢⎣2 m Ω 0 ⎥⎦.⎢⎢ 1
⎥⎦
1
⎣
⎣
⎦
T
( )
⎡⎡⎛
2⎞ ⎡
2
2 ⎤⎤
⎢.⎢⎜⎝2ξ Ω +2 i Ω 1−ξ ⎟⎠.⎢⎣.1− ξ −iξ 1−ξ ⎥⎦⎥
⎣
⎦
2 m.⎢
D U =
⎢
0
⎢⎣
⇒ [V ]T [
][ ]
⎤
⎥
⎥
⎡
⎤
.⎢⎛⎜2 ξ Ω−2 iΩ 1−ξ2 ⎞⎟.⎡.1−ξ2 +iξ 1−ξ2 ⎤⎥⎥ (45)
⎥⎦⎦⎥⎦
⎠ ⎢⎣
⎣⎝
0
( )
Da mesma forma
⎡− ξ −i 1− ξ2 1⎤ ⎡k −m Ω2
0 ⎤ ⎡ξ + i 1− ξ2 ξ −i 1− ξ2 ⎤
⎢
⎥.⎢
⎥ ⇒
[V ] [K ][U] = ⎢− ξ +i 1− ξ2 1⎥ ⎣⎢ 0 k −m Ω2⎥⎦⎥.⎢⎢ 1
⎥⎦
1
⎣
⎣
⎦
T
(
)(
)
⎡ .2
⎤
.2 ⎡
2
2⎤
0
⎢ ω. − Ω .⎢⎣. 1− ξ − iξ 1− ξ ⎥⎦
⎥
2 m.. ⎢
⎥
⇒ [V ]T [K ][U] =
.2
.2 ⎡
2
2⎤
⎢
ω. − Ω . . 1− ξ + iξ 1− ξ ⎥
0
⎢
⎥
⎣
⎦⎦
⎣
(
)(
)
.2
onde foi usado a freqüência ω = k m .
(46)
(47)
2o QUADRIMESTRE DE 2008
9
A substituição de (44), (45) e (46) na equação (43) fornece duas equações independentes
em η1 e η 2 . As expressões 1 − ξ 2 ± iξ 1 − ξ 2
são nulas somente quando ξ = 1 ou seja
c = C CRIT , no caso de amortecimento crítico.
Como estamos estudando o caso em que
c < C CRIT , podemos dividir as equações de η1 e
η 2 pela expressão entre colchetes, resultando
finalmente as equações
(
(
)
)
&& 1 + 2Ω⎛⎜ ξ + i 1 − ξ 2 ⎞⎟.η& 1 + ω 2 − Ω 2 .η = 0
η
1
⎠
⎝
(48a)
(
)
radicandos das raízes (50) e (52). Isto em nada
diminuirá a generalidade da solução, uma vez que
numericamente as raízes podem ser calculadas
exatamente. Considerando-se ξ << .1, ou seja, um
pequeno amortecimento, esta simplificação faz
com que
2
⎛ξΩ ± iΩ 1− ξ2 ⎞ − (ω2 − Ω2 ) = ±iω
⎜
⎟
⎝
⎠
(53)
As raízes ficarão com a forma mostrada abaixo:
r1 = −ξΩ + i(−Ω 1− ξ2 + ω)
precessão retrógrada
(54)
&& 2 + 2Ω⎛⎜ ξ − i 1 − ξ 2 ⎞⎟.η& 2 + ω 2 − Ω 2 .η = 0
η
2
⎠
⎝
(48b)
r2 = −ξΩ − i(Ω 1 − ξ + ω) precessão síncrona
(55)
d) Solução das equações diferenciais
s1 = −ξΩ − i(−Ω 1− ξ2 + ω) precessão retrógrada
A solução da equação homogênea é do tipo
&&1 = r 2 e .rt .
(49)
η1 = e .rt ; η& 1 = re.rt ; η
Substituindo esses valores na equação
(48a), teremos as raízes
s 2 = −ξΩ + i(Ω 1 − ξ + ω) precessão síncrona
2
(56)
⎛
r.1,2 = −⎛⎜ξΩ + iΩ 1− ξ2 ⎞⎟ ± ⎜
⎝
⎠ ⎜
⎝
2
⎞
⎛ξΩ + iΩ 1− ξ2 ⎞ − (ω2 − Ω2) ⎟
⎜
⎟
⎟
⎝
⎠
⎠
2
(57)
Com as raízes acima, as variáveis modais
assumem a forma
η1 = C1e .r.1t + C2e .2 ⇒ C1e−ξ.Ω . t.ei.(−Ωc +ω)t + C2e−ξ.Ω.t .e−i.(Ωc + ω)t
.r t
(58)
(50)
.s.2t
A solução da equação homogênea (48b) é
&& 2 = s 2 e .st
do tipo η2 = e.st ; η& 2 = se s.t ; η
(51)
Substituindo esses valores, teremos as duas
outras raízes
⎛
s.1,2 = −⎛⎜ξΩ − iΩ 1− ξ2 ⎞⎟ ± ⎜
⎝
⎠ ⎜
⎝
2
⎞
⎛ξΩ − iΩ 1− ξ2 ⎞ − (ω2 − Ω2) ⎟
⎜
⎟
⎟
⎝
⎠
⎠
(52)
Para que possamos continuar com uma solução analítica e ter um melhor sentimento físico
do resultado, vamos fazer uma simplificação nos
10
2o QUADRIMESTRE DE 2008
η2 = D1e.s.1t +D2e
⇒D1e−ξ.Ω.t .e−i.(−Ωc + ω)t +D2e−ξ.Ω . t.ei.(Ωc +ω)t
(59)
onde, Ω c = Ω 1 − ξ 2
(60)
Voltando ao vetor original q = [U]η, equação (41), e substituindo q da equação (19), U da
equação (40):
x ⎫ ⎧⎪⎛⎜ ξ + i 1 − ξ 2
⎬ = ⎨⎝
⎩y ⎭ ⎩⎪
{q} = ⎧⎨
⎞η + ⎛ ξ − i 1 − ξ 2
⎟ 1 ⎜
⎠
⎝
η1 + η 2
⎞η ⎫⎪
⎟ 2
⎠ ⎬
⎪⎭
(61)
A solução final nas variáveis x c ( t ) e y c ( t ) apresenta movimentos harmônicos com freqüências de
precessão síncrona e retrógrada.
x c ( t ) = e −ξ.Ω.t .
[E1 cos (Ω c + ω ).t + F1 sen (Ω c + ω ).t + G1 cos (− Ω c + ω ).t +
(
)
H1 sen (− Ω c + ω ).t
]
(62)
]
(63)
y c ( t ) = e −ξ.Ω.t . [E 2 cos (Ω c + ω ).t + F2 sen Ω c + ω .t + G 2 cos (− Ω c + ω ).t + H2 sen (− Ω c + ω ).t
As expressões ξ ± i 1 − ξ 2 , por serem
constantes, foram incorporadas às constantes de
integração. Existem apenas quatro constantes
indeterminadas de integração, uma vez que elas
relacionam-se entre si na forma abaixo:
E1 = ξ.E 2 − 1 − ξ 2 F2
(64)
F1 = ξ.F2 + 1 − ξ 2 E 2
(65)
G1 = ξ.G 2 + 1 − ξ 2 H 2
(66)
H1 = ξ.H2 − 1 − ξ 2 G 2
(67)
As equações (62) e (63) mostram que o
movimento nas direções x e y são vibrações
harmônicas amortecidas; o fator e −ξ.Ω.t fará com
que as amplitudes de vibração decresçam
exponencialmente com o tempo. As freqüências
naturais são alteradas em relação ao movimento
não amortecido. Essa freqüência é reduzida no
caso da precessão síncrona e aumentada no
caso da precessão retrógrada.
O objetivo principal desse exemplo literal foi
mostrar o desacoplamento das equações nas variáveis modais conforme equações (48). Nesse
caso particular, não há a possibilidade delas ficarem acopladas pelas matrizes de massa ou rigidez, duas a duas, uma vez que os autovalores da
matriz D não serem complexos conjugados puros,
ou seja: ω j = −a + ib , ω j+1 = −a − ib , para j ímpar
e, portanto, ω j + ω j+1 = −2a ≠ 0 .
Mesmo no casos em que não há amortecimento, os pares de equações modais, correspondentes aos autovalores conjugados puros
ωi,i+1 = ±i.ω, são desacoplados também, quando
as matrizes de massa e rigidez possuem
submatrizes diagonais (2 x 2), ao longo das
três diagonais centrais, como na discretização
em Elementos Finitos, pois m i,i = m i+1,i+1 e
mi,i+1 = m i+1,i = 0, onde i = 1,3,5..., o mesmo
acontecendo para a matriz de rigidez. Veja detalhes em [1] e [2].
Conclusões
Um novo método está sendo proposto para
desacoplamento de um sistema simultâneo de
equações diferenciais de movimento rotodinâmico
amortecido.
O desacoplamento é realizado no espaço
padrão, com matrizes (n x n) somente, evitando,
dessa maneira, o grande esforço computacional
para o cálculo dos autovalores quando o sistema
é transformado para o espaço estado (2n x 2n).
São utilizadas as matrizes de massa M e de
rigidez K, ambas simétricas, e a matriz giroscópica amortecida D não simétrica, sendo esta última a soma da matriz de amortecimento C e da
matriz giroscópica G. Devido ao fato da matriz D
não ser simétrica, é necessária a solução de dois
problemas conjugados, o primeiro envolvendo M,
D, K e o segundo, a matriz transposta de D, ou
seja, M, DT, K.
A existência de dois problemas conjugados
não apresenta esforço computacional adicional,
uma vez que os autovalores dos dois sistemas
2o QUADRIMESTRE DE 2008
11
são os mesmos. Os autovalores da matriz isolada D são diferentes dos autovalores fornecidos
pelo sistema, porém seus autovetores são os
mesmos. O desacoplamento das equações diferenciais é obtido da seguinte forma:
a) Diagonaliza-se a matriz D através dos
autovetores de D e de sua transposta DT,
que formam um sistema biortogonal;
b) Sendo esses autovetores os mesmos do
sistema D, M e K, como conseqüência,
eles também diagonalizam as matrizes M
e K. Dessa forma são obtidas as n equações diferenciais independentes nas variáveis modais.
Um exemplo em forma literal mostra todas
as fases do desacoplamento, dando ainda as
soluções nas variáveis originais, onde se pode
perceber a possibilidade das duas precessões, a
síncrona e a retrógrada.
Referências
[1] CASTILHO, A., PRODONOFF, V., LOPES, T. A. P. Problema Rotodinâmico de Autovalor (Par te 1): Sistema Giroscópico Não Amor tecido.
[2] CASTILHO, A., 2007, “Uma Visão Global da Rotodinâmica de Turbomáquinas: Ênfase no Método de Elementos Finitos e na Propriedade dos
Autovetores Giroscópicos de Desacoplaram as Equações de Movimento”, Tese de D. Sc., Programa de Engenharia Oceânica, COPPE/UFRJ,
Rio de Janeiro, RJ, Brasil.
[3] ZEPK A, S., 1981, Resposta Dinâmica de Torres Estaiadas, Tese de Mestrado, Programa de Engenharia Mecânica, Instituto Mili tar de
Engenharia, Rio de Janeiro, RJ, Brasil.
[4] MEIROVITCH, L.,2000, Principles in Techinique of Vibrations, Prentice-Hall International (UK) Limited, London.
[5] MEIROVITCH, L., A Modal Analisys for the Response of Linear Gyroscopic Systems, Journal of Applied Machanics, vol 42, n 2, 1975, pp 446-450.
[6] ZHENG, Z., REN, G.,WILLIAMS, F. W., The Eigenvalue Problem for Damped Gyroscopic Systems, Int. J. Mech. Sci., vol 39, n 6, 1997, pp 741-750.
[7] SAWICKI, J. T., GENTA, G., Modal Uncoupling of Damped Gyroscopic Systems, Journal of Sound and Vibration vol 244, n 3, 2001, pp 431-451.
Lista de símbolos
C, [C]
Matriz de amor tecimento
q
Vetor de coordenadas generalizadas
G, [G]
Matriz giroscópica
Q(t)
Vetor força ex terna
[G]
Matriz giroscópica transposta
t
Tempo
gi, j
Coeficiente da matriz giroscópica
U, u
Autovetor de [D]
ci, j
Coeficiente da matriz de amor tecimento
V, v
Autovetor de [D]T
D, [D]
Soma das matrizes giroscópica e de amor tecimento
XYZ
Referencial Inercial, Fixo ou Global
di, j
Soma de ci, j + g i, j
xyz
Referencial Móvel solidário à roda
[I]
Matriz uUnitária
η
Vetor de coordenadas modais
i ; j = √-1
Unidade no campo complexo
ξ
Razão de amor tecimento
K, [K]
Matriz de rigidez
ωi
Freqüência Natural
ki, j
Coeficiente da matriz de rigidez
[λ]
M, [M]
Matriz de Massa
λi =- ωi
mi, j
Coeficiente da matriz de massa
Ω
T
12
2o QUADRIMESTRE DE 2008
Matriz de Autovalores
2
Autovalor
Freqüência de Rotação da roda
Baixar