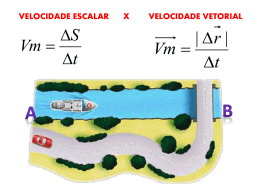
MOVIMENTOS: COMO DESCREVÊ-LOS? Marta Feijó Barroso IF-UFRJ, 2006 conceitos: trajetória posição deslocamento velocidade aceleração exemplos: movimento retilíneo movimento circular preliminares (escondido): O QUE SE MOVE o modelo para o que é observado QUEM OBSERVA o observador, o ponto de referência, ... objeto de nosso estudo sistema o observador sistema de referência . O ponto de referência O O O trajetória O objeto de nosso estudo sistema modelo: “partícula” O r (t) O r (t) O t r (t ) vetor posição da partícula no instante t em relação ao observador em O. O t r (t ) O r r (tt ) tt t r (t ) O vetor deslocamento da partícula entre os instantes t e t+t r r (tt ) tt r r ( t t ) r ( t ) t r (t ) O r r (tt ) tt vetor deslocamento da partícula entre os instantes t e t+t r r ( t t ) r ( t ) r final r inicial r AB r B r A r BC r C r B r AC r C r A 0 A C rAB rBC B velocidade deslocamento velocidade tempo velocidade média no intervalo t , t+t r v t r (t ) O r (tt ) t = 0,5 s r (t ) O r r (tt ) v t = 0,5 s r (t ) O r r (tt ) v secante à trajetória t = 0,5 s r (t ) O r r (tt ) v secante à trajetória velocidade ? t r (t ) r r (tt ) O t+t v t r (t ) O r r (tt ) t+t v t r (t ) O r t decrescente v t r (t ) r v t decrescente r decrescente O v t decrescente t r (t) O r decrescente r v lim t 0 t t r (t ) O r t decrescente v t r (t ) O v r v lim t 0 t tangente à trajetória no instante considerado r v lim lim v t 0 t 0 t tangente à trajetória no instante considerado v (t ) v (t 2 ) t r (t ) O v ( t1 ) v v (t 3 ) tangente à trajetória retilíneo?... a velocidade tem sempre a mesma direção o movimento é retilíneo movimento uniforme = deslocamentos iguais em tempos iguais = movimento com velocidade constante v0 r constante v 0 t v lim v v 0 t 0 v0 r constante v 0 t movimento retilíneo uniforme próximo v0 r constante v 0 t r v 0 t movimento retilíneo uniforme: deslocamentos iguais em tempos iguais próximo v0 r constante v 0 t r v 0 t movimento retilíneo uniforme: deslocamentos iguais em tempos iguais próximo O movimento e sua descrição – pausa para respiração deslocamento = velocidade x tempo Se a trajetória “encurva”, a velocidade mudou… se a velocidade mudou... é porque tem aceleração... v a lim t 0 t MOVIMENTO ACELERADO definições notação v dv a lim t 0 t dt notação r dr v lim t 0 t dt MOVIMENTO ACELERADO t v( t ) v ( t t ) d v v a d t t MOVIMENTO ACELERADO v ( t t ) t v( t ) d v v a d t t v ( t t ) v( t ) t 0 .5 s v v v a 2 v t 0,5 MOVIMENTO ACELERADO t a (t ) v ( t t ) v ( t t ) v( t ) d v v a d t t v( t ) v t 0 .5 s MOVIMENTO ACELERADO d v v a d t t a (t ) v a t v ( t t ) t v ( t t ) v( t ) v( t ) a t t 0 .5 s P MOVIMENTO ACELERADO v a t v a t v v v // v v// v MOVIMENTO ACELERADO v a t a t v v v // MOVIMENTO ACELERADO v a t v' a t v v v // P MOVIMENTO ACELERADO a e v são paralelos v a t a t v v' v // apenas o módulo da velocidade é alterado! MOVIMENTO ACELERADO v a t a e v são antiparalelos a t v v vo' módulo da velocidade é alterado // (também seu sentido poderia ser mudado!) MOVIMENTO ACELERADO v a t num movimento retilíneo... P MOVIMENTO ACELERADO v a t Para mudar a direção da velocidade, é necessária uma componente da aceleração na direção perpendicular a ela… e aí podemos ter trajetórias curvas. MOVIMENTO ACELERADO v a t v r v t muda a direção da velocidade v v // muda o módulo da velocidade MOVIMENTO ACELERADO … MOVIMENTO CIRCULAR... ? t r (t ) t r (t ) t r (t ) v(t ) t v(t ) r (t ) r ( t t ) t v(t ) r (t ) r ( t t ) módulo de r é constante direção de r varia t v(t ) r (t ) r ( t t ) módulo de r é constante direção de r varia v perpendicu lar a r t r (t ) v(t ) t r (t ) v(t ) t r (t ) v(t ) t v(t ) r (t ) módulo de r é constante direção de r varia t s r v(t ) r (t ) r ( t t ) r r s r v r v r r s v v v t v r t v 0 r r s r v r r E A ACELERAÇÃO NO MOVIMENTO CIRCULAR ? v(t ) v ( tt ) v(t ) v ( tt ) v caso particular: movimento circular uniforme t v(t ) caso particular: movimento circular uniforme v(t ) v r caso particular: movimento circular uniforme v(t ) v r v r r r s r r s r v r v v r r r s r v r s r v r v ( s ) v r a 2 r v r r r a t aceleração perpendicular a v que é perpendicular a r a 2 r aceleração na direção radial para dentro aceleração centrípeta! movimento circular não uniforme v(t ) v r movimento circular não uniforme v t (t ) r (t ) movimento circular não uniforme v(t ) v ( tt ) movimento circular não uniforme v(t ) v ( tt ) v(t ) v ( tt ) movimento circular não uniforme v(t ) v ( tt ) v PAPES IV - LADIF MOVIMENTO ACELERADO v a t v a t v v v // v v v // movimento circular não uniforme v v v // na direção perpendicular à velocidade que é a direção radial na direção da velocidade que é a direção tangencial a a rˆ a tˆ r t movimento circular não uniforme v r v a a t r a r a a a a t r movimento circular não uniforme a a r a t a r 2 r aceleração centrípeta - direção radial, para dentro movimento circular não uniforme rˆ tˆ a a r t d a r r dt t aceleração tangencial: a na direção da velocidade, tangente ao círculo, é responsável pelo aumento de seu módulo v = r movimento circular não uniforme rˆ tˆ a a r t a a rˆ a tˆ r a t r rˆ r tˆ 2
Baixar