MOVIMENTO OSCILATÓRIO Movimentos oscilatórios periódicos Movimento harmónico simples (MHS) Sistema massa-mola Representação matemática do MHS Representação gráfica do MHS Definição de frequência e período Equações de movimento do MHS Energia no MHS Pendulo simples Oscilações amortecidas Oscilações forçadas 1 MOVIMENTO OSCILATÓRIO Estamos familiarizados com diversos tipos de movimentos oscilatórios periódicos 2 mais exemplos de movimento oscilatório 3 outros exemplos de movimento oscilatório Vibrações atómicas e moleculares para estados excitados Eletrões vibram em torno do núcleo frequência alta: ~1014 - 1017 Hz Os núcleos das moléculas vibram frequência intermediária: ~1011 - 1013 Hz 4 Vibrações das moléculas de água 5 Ligações de átomos de carbono com hidrogénio são importantes na química da vida Vibrações CH2 Symmetrical stretching Antisymmetrical stretching Scissoring Rocking Wagging Twisting 6 mais exemplos de movimento oscilatório Os átomos num sólido não estão completamente imóveis. Eles vibram com uma amplitude pequena em torno da sua posição de equilíbrio 7 MOVIMENTO PERIÓDICO O movimento periódico é o movimento dum corpo que se repete regularmente O corpo volta a uma dada posição depois dum certo intervalo de tempo fixo O MOVIMENTO HARMÓNICO SIMPLES (MHS) É um tipo especial de movimento periódico e acontece quando a força que age sobre a partícula • é proporcional ao deslocamento da partícula em relação a posição de equilíbrio • e é dirigida sempre para a posição de equilíbrio Fs kx Lei de Hooke 8 MOVIMENTO DO SISTEMA MASSA-MOLA Um bloco de massa m é ligado a uma mola O bloco se desloca numa superfície horizontal sem atrito Quando a mola não está esticada nem comprimida, o bloco está na posição de equilíbrio x = 0 Vimos anteriormente que pela Lei de Hooke que Fs kx k é a constante elástica Fs força restauradora x deslocamento A força restauradora está sempre dirigida para o ponto de equilíbrio é sempre oposta ao deslocamento O movimento do sistema massa-mola é um movimento harmónico simples 9 • O bloco é deslocado para a direita de x=0 – A posição é positiva A força restauradora é dirigida para a esquerda • • • • • • O bloco está na posição de equilíbrio x=0 A mola não está nem esticada nem comprimida A força é 0 O bloco é deslocado para a esquerda de x = 0 – A posição é negativa A força restauradora é dirigida para a direita 10 ACELERAÇÃO De acordo com a segunda lei de Newton k Fs ma -kx ma a x m A aceleração é proporcional ao deslocamento do bloco O sentido da aceleração é oposto ao sentido do deslocamento (sinal menos) Num corpo que se mova com um movimento harmónico simples (MHS), a aceleração é proporcional ao seu deslocamento mas tem um sentido oposto ao deslocamento A aceleração não é constante as equações cinemáticas não podem ser aplicadas Se o bloco é largado de uma posição x = A, então a aceleração inicial é O bloco continua até x = - A onde a sua aceleração é Quando o bloco passa pelo ponto de equilíbrio, a a k A m k A m a0 11 MOVIMENTO DO BLOCO O bloco continua a oscilar entre –A e +A A força é conservativa Na ausência de atrito, o movimento continua para sempre Sistemas reais estão sujeitos a atrito, portanto não oscilam indefinidamente ! 12 REPRESENTAÇÃO MATEMÁTICA DO MOVIMENTO HARMÓNICO SIMPLES Tratamos o bloco como sendo uma partícula Escolhemos que a oscilação ocorre ao longo do eixo Aceleração a x 2 d 2x k a 2 x dt m ou x Definimos 2 k m d 2x 2 x 2 dt Precisamos de uma função que satisfaça a equação diferencial de segunda ordem Procuramos uma função x(t) cuja segunda derivada é a mesma que a função original 2 com um sinal negativo e multiplicada por AS FUNÇÕES TRIGONOMÉTRICAS SIN E COS RESPEITAM ESTES REQUISITOS ! Podemos construir uma solução com uma ou ambas as funções 13 Funções seno e cosseno 14 REPRESENTAÇÃO GRÁFICA A seguinte função cos é uma solução da equação xt A cost onde A, e são constantes A é a amplitude do movimento esta é a posição máxima da partícula quer na direção positiva quer na negativa é a frequência angular Unidade: rad/s é a fase (constante) ou o ângulo de fase inicial 0 • Se a partícula está em x = A para t = 0, então • A fase do movimento é a quantidade • x(t) é períodica e o seu valor é o mesmo cada vez que t aumenta de 2 radianos t 15 EXPERIÊNCIA A caneta ligada ao corpo oscilante desenha uma curva sinusoidal no papel que está em movimento Verifica-se assim a curva cosseno, considerada anteriormente 16 DEFINIÇÕES • O período, T, é o intervalo de tempo necessário para que a partícula faça um ciclo completo do seu movimento Os valores de x e v da partícula no instante t são iguais aos valores de x e v em t + T T • 2 O inverso do período chama-se frequência A frequência representa o nº de oscilações executadas pela partícula por unidade de tempo 1 ƒ T 2 • A unidade é o ciclo por segundo = hertz (Hz) 17 EQUAÇÕES DO MOVIMENTO NO MHS xt A cost dx v A sin t dt d 2x a 2 2 A cost dt vmax k A A m amax k A A m 2 18 ENERGIA NO MHS Energia do sistema massa-mola • Energia cinética K 12 mv2 12 m A sin t 2 1 2 2 2 2 t A sin 2 k onde 2 k k m 2 m assim K 12 kA2 sin 2 t • Energia Potencial U 12 kx2 12 k A cost 2 U 12 kA2 cos 2 t 19 • Energia Mecânica EM K U 1 2 1 2 mv kx 2 1 2 2 kA2 sin 2 t 12 kA2 cos2 t EM kA 1 2 2 20 Pêndulo simples O pêndulo simples também pode exibir um movimento harmónico simples (MHS) O MHS acontece quando o fio faz um ângulo pequeno com a vertical pequena oscilação 21 Pêndulo simples O comprimento, L, do pêndulo é constante Forças que atuam sobre a esfera: Peso P mg Tensão T Força tangencial (força restauradora) d 2s Ft mg sin m 2 dt d 2 g (s L ) sin 2 dt L Para ângulos pequenos, d 2 g sin 2 dt L Este resultado confirma que o movimento é o MHS sistemamassa - mola d 2x k x 2 dt m 22 A função que satisfaz a equação diferencial: d 2 g 2 dt L é sistema massa - mola x A cos(t ) max cos(t ) onde 2 g L L T 2 g é a frequencia angular o período 23 Exemplo 1: Considere um pêndulo de comprimento bola está presa a uma mola de constante simultaneamente em equilíbrio. Determine k. L com uma bola de massa M. Admita que o pêndulo e a mola estão para pequenas oscilações. Resolução Fpendulo Mg sin Mg Fmola kx kL sin kL x Força resultante que atua sobre a bola: Ma Fpendulo Fmola Mg kL L M k g Mg kL ML L M L M ML 2 onde A g k g k L M L M 2 24 OSCILAÇÕES AMORTECIDAS Nos sistemas realistas, estão presentes o ATRITO indefinidamente o movimento não oscila Neste caso, a energia mecânica do sistema diminui no tempo e o movimento é conhecido como movimento amortecido Um exemplo de movimento amortecido um corpo está ligado a uma mola e submerso num líquido viscoso A força de atrito pode ser expressa como Fatrito bv b é o coeficiente de amortecimento v a velocidade do corpo de massa m (no fluido o atrito é proporcional à v ) A equação do movimento amortecido é F ma kx bv d 2x dx m 2 kx b dt dt 25 OSCILAÇÕES AMORTECIDAS A função x que satisfaz a equação diferencial: x Ae b t 2m cos(t ) onde d 2x dx m 2 kx b dt dt k b m 2m é 2 Exemplo Animations courtesy of Dr. Dan Russell, Kettering University 26 OSCILAÇÕES FORÇADAS É possível compensar a perda de energia de um sistema amortecido aplicando uma força externa A amplitude do movimento permanecerá constante se o aumento de energia for igual à diminuição da energia por cada ciclo. Exemplo F F F0 cos f t A equação do movimento oscilações forçadas é amortecido para d 2x dx m 2 kx b F0 cos f t dt dt Animations courtesy of Dr. Dan Russell, Kettering University 27 A amplitude de uma oscilação forçada é A onde 0 é a frequência angular natural do oscilador F0 m 2 f 02 4 2 2f 2 onde f é a frequência angular da força aplicada no oscilador RESSONÂNCIA Quando a frequência angular da força aplicada (frequência forçada)é igual à frequência angular natural ( f 0 ) ocorre um aumento na amplitude A A F0 m 2 f 2 2 0 4 2 2 f Amáximo Chama-se RESSONÂNCIA a esse aumento espectacular na amplitude (0 0 0) 28 Exemplo 2:Tacoma bridge Em 1940 ventos constantes causaram vibrações na ponte de Tacoma desencadeando sua oscilação numa frequência próxima de uma das frequências naturais da estrutura da ponte. Foi estabelecida a condição de ressonância ( f 0 ) a ponte caiu 29
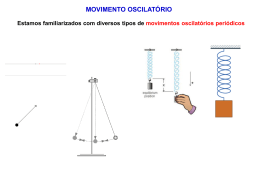
Download