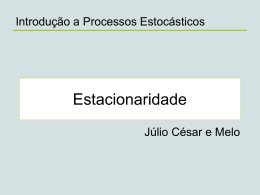
14. Processos Estocásticos
Seja o resultado de um experimento aleatório. Suponha que uma
forma de onda X ( t , ) é associada a cada resultado.A coleção de tais
formas de ondas formam um processo estocástico. O conjunto de { k }
e o índice de tempo t podem ser contínuo ou discreto (contável
finito ou infinito).
Se i S fixo, X ( t , ) é uma função específica do tempo.
Se t é fixo, X 1 X ( t1 , i ) é uma variável aleatória.
Se i S e t são fixos X 1 X ( t1 , i ) , X ( t , ) é um número.
X (t, )
X (t, )
n
X (t, )
X (t, )
k
2
X (t, )
1
0
t
t
1
t
2
1
Exemplo de um processo aleatório X(t).
X ( t ) a cos( 0 t ),
onde a e o são constantes e é uma v.a. uniformemente distribuída
no intervalo ( 0 , 2 ).
se X(t) é um processo estocástico, então para um t fixo, X(t)
representa uma variável aleatória. Sua função distribuição de
probabilidade é dada por:
F X ( x , t ) P{ X ( t ) x}
Note que F ( x , t ) depende de t, então para diferentes valores de t, temse diferentes variáveis aleatórias. Portanto
X
f X ( x, t )
dF X ( x , t )
dx
representa a função densidade de probabilidade de primeira ordem do
processo X(t).
2
Para t = t1 e t = t2, X(t) representa duas diferentes variáveis aleatórias
X1 = X(t1) e X2 = X(t2), respectivamente. Sua distribuição conjunta é
dada por
F X ( x 1 , x 2 , t1 , t 2 ) P { X ( t1 ) x 1 , X ( t 2 ) x 2 }
e
F X ( x1 , x 2 , t1 , t 2 )
2
f X ( x1 , x 2 , t1 , t 2 )
x1 x 2
representa função densidade de probabilidade de segunda ordem do
processo X(t). Da mesma forma f ( x1 , x 2 , x n , t1 , t 2 , t n ) representa
a função densidade de probabilidade conjunta de n-ésima ordem do
processo estocástico X(t). A especificação completa do processo
estocástico X(t) requer o conhecimento de todo t i , i 1, 2 , , n
e todo n. f ( x1 , x 2 , x n , t1 , t 2 , t n )
X
X
Média de um processo estocástico:
( t ) E { X ( t )}
x f X ( x , t ) dx
representa o valor médio do processo X(t), em geral, a média depende
3
de t.
Função autocorrelação de um processo X(t) é definido como
R X X ( t1 , t 2 ) E { X ( t1 ) X ( t 2 )}
*
*
x 1 x 2 f X ( x 1 , x 2 , t1 , t 2 ) dx 1 dx 2
que representa o inter-relacionamento entre as variáveis aleatórias
X1 = X(t1) e X2 = X(t2) geradas do processo aleatório X(t).
Propriedades:
1. R ( t1 , t 2 ) R * ( t 2 , t1 ) [ E { X ( t 2 ) X * ( t1 )}] *
XX
2
XX
R XX ( t , t ) E {| X ( t ) | } 0 .
2
(Potência média instantânea)
3. R ( t1 , t 2 ) representa uma função definida não negativa, isto é, para
qualquer conjunto de valores constantes {a i } in 1
XX
n
n
a i a j R XX ( t i , t j ) 0 .
*
i 1 j 1
e
C XX ( t1 , t 2 ) R XX ( t1 , t 2 ) X ( t1 ) X ( t 2 )
*
representa a função autocovariância do processo X(t).
4
T
Exemplo 14.1. Se z X ( t ) dt . Então
T
E [| z | ]
2
T
T
T T
T
*
E { X ( t1 ) X ( t 2 )} dt 1 dt 2
T
T T R
XX
( t1 , t 2 ) dt 1 dt 2
Examplo 14.2. Considere o processo aleatório
X ( t ) a cos( 0 t ), com
~ U ( 0 , 2 ).
Determine a média e a função autocorrelação de X(t)
( t ) E { X ( t )} aE {cos( 0 t )}
X
a cos 0 t E {cos } a sin 0 t E {sin } 0 ,
E {cos }
visto que
1
2
2
0
cos d 0 E { sin }.
Similarmente
R XX ( t1 , t 2 ) a E {cos( 0 t1 ) cos( 0 t 2 )}
2
R XX ( t1 , t 2 )
a
2
2
E {cos 0 ( t1 t 2 ) cos( 0 ( t1 t 2 ) 2 )}
a
2
2
cos 0 ( t1 t 2 ).
5
Processos Estocásticos Estacionários
Processos estacionários apresentam uma importante propriedade
estatística: São invariantes ao deslocamento do índice de tempo.
Assim, por exemplo, estacionariedade de segunda ordem implica que
as propriedades estatística dos pares {X(t1) , X(t2) } e {X(t1+c) ,
X(t2+c)} são as mesmas para qualquer c.
Da mesma forma estacionariedade de primeira ordem implica que as
propriedade estatísticas de X(ti) e X(ti+c) são as mesmas para todo c.
Processo Estocástico Estritamente Estacionário
Um processo é estritamente estacionário se:
f X ( x 1 , x 2 , x n , t1 , t 2 , t n ) f X ( x 1 , x 2 , x n , t1 c , t 2 c , t n c )
Para qualquer c, onde o lado direito da equação representa a f.d.p.
conjunta das as v.a’s X 1 X ( t1 ), X 2 X ( t 2 ), , X n X. ( t n ) , e o
lado esquerdo representa a f.d.p. conjunta das v.a.'s aleatórias
X 1 X ( t1 c ), X 2 X ( t 2 c ), , X n X ( t n c ).
t i , i 1, 2 , , n , n 1, 2 , e qualquer
c.
6
Para um processo estacionário no sentido estrito, tem-se
f X ( x,t) f X ( x,t c)
, para qualquer c. Em particular, se c = – t
f X ( x, t ) f X ( x)
isto é, a f.d,p. de primeira ordem de X(t) é independente de t. Neste
caso
E [ X ( t )]
x f ( x ) dx , a constant.
Considerando-se a estatística de segunda ordem, tem-se
f X ( x1 , x 2 , t1 , t 2 ) f X ( x1 , x 2 , t1 c , t 2 c )
para qualquer c. Para caso onde c = – t2, tem-se
f X ( x1 , x 2 , t1 , t 2 ) f X ( x1 , x 2 , t1 t 2 )
isto é, a f.d.p.conjunta de segunda ordem, de um processo
estacionário no sentido estrito depende somente da diferença de
tempo t1 t 2 .
7
Para a função autocorrelação tem-se:
R X X ( t1 , t 2 ) E { X ( t1 ) X ( t 2 )}
*
x 1 x 2 f X ( x 1 , x 2 , t1 t 2 ) dx 1 dx 2
*
R X X ( t1 t 2 ) R X X ( ) R X X ( ),
*
isto é, a função autocorrelação de segunda ordem de um processo
estacionário no sentido estrito depende somente da diferença de tempo
Processo Estacionário no Sentido Amplo
Um processo estocástico é denominado de estacionário no sentido
amplo se:
i)
e ii) E { X ( t1 ) X * ( t 2 )} R ( t1 t 2 ),
E { X ( t )}
Isto é, não diz nada a respeito da função densidade de probabilidade
do processo aleatório, mas somente se refere à média e à função
autocorrelação. Assim pode-se afirmar que estacionariedade no
sentido estrito implica em estacionariedade no sentido amplo. No
entanto, a recíproca não é verdadeira, com exceção para processos
8
gaussianos.
XX
Isto segue do fato de que, se X(t) é um processo gaussiano, então, por
definição X 1 X ( t1 ), X 2 X ( t 2 ), , X n X ( t n ), são variáveis
conjuntamente gaussianas para qualquer t1 , t 2 , t n , cuja função
característica é dada por:
n
n
j
( 1 , 2 ,
X
, n ) e
( tk ) k C
k 1
XX
( ti , t k ) i k / 2
l ,k
onde C ( t i , t k ) é a matriz covariância. Se X(t) é estacionário no
n
n
n
sentido amplo, então
1
XX
j
( 1 , 2 ,
X
, n ) e
k 2 C
k 1
XX
( ti t k ) i k
11 k 1
assim se o conjunto de índices de tempo forem deslocados de uma
constante c, gera um novo conjunto de variáreis aleatórias
conjuntamente gaussianas
X 1 X ( t1 c ), X 2 X ( t 2 c ), , X n X ( t n c )
Assim o conj. de variáveis aleatórias { X i } in 1 e { X i} in 1 tem a mesma
função distribuição de probabilidade para todo n e todo c,
9
estabelecendo a estacionariedade de um processos gaussiano.
Resumindo: se X(t) é um processo gaussiano, então estacionaridade
no sentido amplo implica em estacionariedade no sentido estrito.
No caso do processo X ( t ) a cos( 0 t ), ele é estacionário no
sentido amplo, mas é não no sentido estrito.
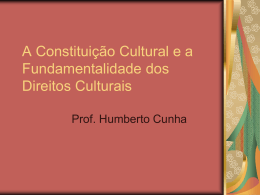
Se X(t) é um processo estacionário no sentido amplo, com média nula,
T
então a variância da v.a. z X ( t ) dt . , é dada por:
T
Z E [| z | ]
2
T
T
T
T
E { X ( t1 ) X ( t 2 )} dt 1 dt 2
*
T
T
T
T
R XX ( t1 , t 2 ) dt 1 dt 2
t
Como t1 e t2 variam de –T a +T, t1 t 2 varia
de –2T a + 2T. R ( ) é constante sobre a área
da região hachuriada, que é dada por:( 0 )
T
2
t1 t 2
XX
T
t
1
T
1
( 2T )
2
2
1
2T
( 2T d ) ( 2T ) d
2
2
que se reduz a:
2
z
2T
2t
R XX ( )( 2 T | |) d
1
2T
2T
2t
R XX ( )( 1
| |
)d .
2T
10
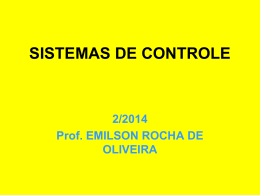
Sistemas com Entrada Aleatória
Um sistema deterministico1 transforma uma forma de onda de entrada
X ( t , i ) em uma forma de onda Y ( t , i ) T [ X ( t , i )] operando somente
sobre a variável de tempo t. Assim, um conjunto de formas de ondas
correspondentes a um processo X(t), gera um novo conjunto de formas
{Y ( t , )} na saída do sistema associado a um novo processo Y(t).
Y (t, )
X (t, )
i
i
X (t)
T []
Y (t)
t
t
Nossa meta é estudar as propriedades estatísticas da saída em termos
das propriedades estatísticas da entrada.
1A stochastic
system on the other hand operates on both the variables t and .
11
Sistemas Determinísticos
Sistemas sem memória
Sistemas com memória
Y ( t ) g [ X ( t )]
Variantes
no tempo
Invariantes
no tempo
Sistemas lineares
Y ( t ) L [ X ( t )]
Sistemas lineares
invariantes no tempo (LTI)
X (t )
h (t )
LTI system
Y (t )
h ( t ) X ( ) d
h ( ) X ( t ) d .
12
Sistemas sem memória:
A saída Y(t) neste caso depende somente do valor atual da entrada
X(t). i.e.,
Y ( t ) g { X ( t )}
(14-25)
entrada estacionária
no sentido estrito
Sistema
sem memória
entrada estacionária
no sentido amplo
Sistema
sem memória
X(t) estacionário
Gaussiano com
Sistema
sem memória
R XX ( )
Fig. 14.4
saída estacionária
no sentido estrito
Não precisa ser
estacionária em qq
sentido
Y(t) estationario, mas
não Gaussiano com
R XY ( ) R XX ( ).
13
Sistemas Lineares : L[.] representa um sistema linear se
L { a 1 X ( t1 ) a 2 X ( t 2 )} a 1 L { X ( t1 )} a 2 L { X ( t 2 )}.
Assim, Y ( t ) L{ X ( t )} representa a saída de um sistema linear.
Sistema invariante no tempo: L[.] representa um sistema
invariante no tempo se
Y ( t ) L{ X ( t )} L{ X ( t t 0 )} Y ( t t 0 )
isto é, o deslocamento da entrada resulta no mesmo deslocamento na
saía. Se L[.] satisfaz as duas condições acima, então o sistema é
linear e invariante no tempo: LTI.
Sistema LTI podem ser completamente especificados pela resposta ao
impulso:
h(t)
Resposta
ao impulso
(t )
LTI
h (t )
t
Impulso
Resposta
ao impulso
14
Então
Y (t)
X (t)
X (t)
t
t
Y (t)
LTI
Y (t )
arbitrary
input
h ( t ) X ( ) d
h ( ) X ( t ) d
Demonstração: Expressndo X(t) como
X (t )
X ( ) ( t ) d
Relacionando X(t) com a saída Y(t) do sistema LTI
Y ( t ) L { X ( t )} L {
X ( ) ( t ) d }
L { X ( ) ( t ) d }
By Linearity
X ( ) L { ( t )} d
X ( ) h ( t ) d
By Time-invariance
h ( ) X ( t ) d .
15
Saída do sistema: Usando a definição de valor médio e relacionado
a entrada com a saída
( t ) E {Y ( t )}
E { X ( ) h ( t ) d }
Y
X
( ) h ( t ) d X ( t ) h ( t ).
Da mesma forma, definindo a função correlação cruzada entre o processo
de entrada e de saída, então:
R XY ( t1 , t 2 ) E { X ( t1 )Y ( t 2 )}
*
E { X ( t1 )
*
X ( t 2 ) h ( ) d }
*
*
E { X ( t1 ) X ( t 2 )} h ( ) d
*
R XX ( t1 , t 2 ) h ( ) d
*
R XX ( t1 , t 2 ) h ( t 2 ).
*
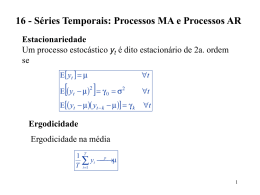
A função autocorrelação da saída é dada por:
16
R YY ( t1 , t 2 ) E {Y ( t1 )Y ( t 2 )}
*
E {
X ( t 1 ) h ( ) d Y ( t 2 )}
*
*
E { X ( t1 )Y ( t 2 )} h ( ) d
R
XY
( t1 , t 2 ) h ( ) d
R XY ( t1 , t 2 ) h ( t1 ),
ou
R YY ( t1 , t 2 ) R XX ( t1 , t 2 ) h ( t 2 ) h ( t1 ).
*
(t )
(t )
h(t)
X
Y
(a)
R XX ( t1 , t 2 )
h*(t2)
XY
1 2
(b)
R
( t ,t )
h(t1)
R YY ( t1 , t 2 )
17
Em particular se X(t) é estacionário no sentido amplo, então
( t ) e portanto
X
X
(t )
Y
X
h ( ) d X c , a constante.
ainda R ( t1 , t 2 ) R ( t1 t 2 ) , tal que
XX
XX
R XY ( t1 , t 2 )
R XX ( t1 t 2 ) h ( ) d
*
R XX ( ) h ( ) R XY ( ),
*
t1 t 2 .
Assim, X(t) e Y(t) são conjuntamente estacionários no sentido amplo.
A função autocorrelação de saída é então simplificada
R YY ( t1 , t 2 )
R
XY
( t1 t 2 ) h ( ) d ,
t1 t 2
R XY ( ) h ( ) R YY ( ).
substituindo R (τ ) , obtém-se:
XY
R YY ( ) R XX ( ) h ( ) h ( ).
*
18
Baixar