Universidade Federal de São Carlos
Centro de Ciências Exatas e de Tecnologia
Departamento de Matemática
TRANFORMAÇÕES NO PLANO
E GRUPOS DE SIMETRIA
Autor: Mariele Parteli Florencio
Orientador: Prof. Dr. Roberto Ribeiro Paterlini
Disciplina: Trabalho de Conclusão de Curso
Curso: Licenciatura em Matemática
Professores Responsáveis: Karina Schiabel Silva
Tomas Edson Barros
Vera Lúcia Carbone
São Carlos, 21 de dezembro de 2011.
Universidade Federal de São Carlos
Departamento de Matemática
TRANFORMAÇÕES NO PLANO
E GRUPOS DE SIMETRIA
São Carlos - SP, 21 de dezembro de 2011.
Mariele Parteli Florencio
Autora
Roberto Ribeiro Paterlini
Orientador
Para meus pais Maria e Luiz.
Agradeço todas as dificuldades que enfrentei; não fosse por elas, eu não teria saı́do do
lugar. As facilidades nos impedem de caminhar. Chico Xavier
Agradecimentos
Em primeiro lugar agradeço a Deus pelas graças que tenho recebido. Agradeço a meu
pai e a minha mãe, pelo amor, confiança e incentivo. Agradeço também ao meu orientador
por toda a dedicação dispensada ao meu trabalho. Ao meu irmão Luiz e ao meu namorado
Bruno e como não poderia faltar Spyke, duque e peri, meus fiéis companheiros.
Resumo
Esse trabalho está divido em dois capı́tulos. No primeiro, Isometrias no plano, apresentamos
uma introdução às transformações do plano, particularmente, às isometrias. Com isso estamos interessados em estudar propriedades geométricas do plano usando essas transformações.
Comentamos a seguir as seções do Capı́tulo 1. Na seção Isometrias e propriedades
geométricas, assim como sugere o tı́tulo, definimos isometrias no plano e provamos algumas propriedades geométricas, tais como: toda isometria é bijetiva, transforma reta em reta,
leva ângulo em ângulo e preserva sua medida e, consequentemente, transforma um triângulo
em outro triângulo congruente ao primeiro.
Nas três seções seguintes, Reflexões e propriedades geométricas, Rotações e propriedades
geométricas e Translações e propriedades geométricas, estudamos esses três tipos especı́ficos
de isometrias: as reflexões, as rotações e as translações. Elas são estudadas sob o ponto de
vista geométrico.
Nas quatro seções seguintes, Isometrias em coordenadas, Reflexões em coordenadas,
Rotações em coordenadas e Translações em coordenadas, desenvolvemos as equações de cada
uma dessas isometrias em um sistema de coordenadas cartesianas do plano. Com essas
equações pudemos provar alguns teoremas, apresentados na última seção, Resultados finais.
O Teorema mais interessante é que toda isometria é uma rotação, uma translação, uma
reflexão ou uma reflexão com deslizamento.
Preparamos assim as ferramentas necessárias para o Capı́tulo 2, Grupos de simetria de
polı́gonos regulares, em que apresentamos o estudo das simetrias dos polı́gonos regulares.
Comentamos a seguir as seções do Capı́tulo 2. Na seção Definições e Resultados Iniciais
definimos polı́gonos regulares e enunciamos alguns resultados importantes para as seções
seguintes. Nas seções O Grupo de simetrias do triângulo equilátero e Grupos de simetrias do
quadrado calculamos e descrevemos esses grupos de simetrias especı́ficos. Terminamos com a
seção Resultados Finais, em que encontramos os grupos de simetrias de polı́gonos regulares
quaisquer e descrevemos propriedades desses grupos.
Apresentação
Ao cursar a disciplina Estruturas Algébricas do curso de Licenciatura em Matemática,
interessei-me pelo estudo dos grupos. Algum tempo depois, como tinha que fazer o Trabalho de Conclusão de Curso, pensei em retomar esse estudo. Após conversar com alguns
alunos da graduação sobre orientadores procurei o professor Roberto, propondo-lhe um trabalho nesse assunto. Ele disse que poderia ser meu orientador e sugeriu que estudássemos
alguns grupos relacionados com geometria. Na primeira parte do trabalho estudamos os
pré-requisitos, que seriam as isometrias do plano. Esse trabalho foi apresentado na forma
de painel no final junho de 2011. Na segunda parte do trabalho estudamos os grupos de
simetrias dos polı́gonos regulares, entendidos com o conjunto das isometrias que preservam
um determinado polı́gono regular.
Gostaria de afirmar que esse trabalho contribuiu para minha formação, e, em particular,
me possibilitou complementar o que aprendi sobre Álgebra e Geometria na graduação.
Sumário
1 Isometrias no plano
1.1 Introdução . . . . . . . . . . . . . . . .
1.2 Transformações no plano . . . . . . . .
1.3 Isometrias e propriedades geométricas .
1.4 Reflexões e propriedades geométricas .
1.5 Translações e propriedades geométricas
1.6 Rotações e propriedades geométricas .
1.7 Isometrias em coordenadas . . . . . . .
1.8 Translações em coordenadas . . . . . .
1.9 Rotações em coordenadas . . . . . . .
1.10 Reflexões em coordenadas . . . . . . .
1.11 Resultados finais . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
8
8
10
16
20
21
22
26
27
28
29
2 Grupos de simetria de polı́gonos regulares
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Definições e resultados iniciais . . . . . . . . . . . . . .
2.3 O grupo de simetrias do triângulo equilátero . . . . . .
2.4 O grupo de simetrias do quadrado . . . . . . . . . . . .
2.5 O grupo de simetria de um polı́gono regular de n lados
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
33
33
36
39
44
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Capı́tulo 1
Isometrias no plano
1.1
Introdução
Nesse capı́tulo apresentamos noções básicas de funções denominadas transformações no
plano, dando ênfase a algumas funções especı́ficas chamadas isometrias, que possuem a propriedade de preservar a distância entre dois pontos. Entre as isometrias se encontram as
translações, as rotações e as reflexões, que serão estudadas separadamente.
1.2
Transformações no plano
Identificamos o plano geométrico euclidiano com o produto cartesiano R2 . Começamos com
Definição 1.2.1. Chama-se transformação no plano toda função T : R2 → R2 .
Essa denominação para funções de R2 em R2 se justifica por que estamos estudando
essas funções do ponto de vista geométrico. Assim, dada uma transformação T : R2 → R2 ,
estamos interessados em ver como ela transforma figuras do plano.
Ao estabelecer um sistema cartesiano em R2 pode-se descrever uma transformação T :
2
R → R2 através de suas coordenadas, ou seja, escrevendo T (x, y) = (x1 , y1 ), e expressando
x1 e y2 como equações em x e y.
Exemplo 1.2.2. Seja T a transformação descrita pelas equações
{
x1 = x
y
y1 =
2
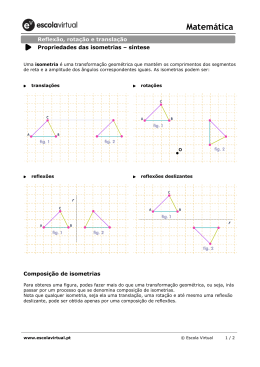
Essa transformação possui o efeito de reduzir determinada figura verticalmente, ou seja, ao
ser aplicada ao ponto (x,y) do plano preserva a abcissa x e reduz a ordenada à metade.
Confira a Figura 1.1.
Notemos que T é injetiva e sobrejetiva. De fato, seja (x1 , y1 ) um ponto do plano. Existe
um único ponto (x, y) do plano do qual ele é imagem, cujas coordenadas são dadas por x = x1
e y = 2y1 .
8
Isometrias no plano
9
y
1
.................................
..............
.........
........
.......
.......
......
......
.....
.....
.....
.
.
.
.
.....
...
.
.
.
....
.
...
...
.
.
...
...
.
...
...........................................................
.
.
.
.
.
.
..
.
.
.
.
...
.
.
.
.
..........
.......
.
.
.
..
.
.
.
.
.
.
.
.
....... ....
...
...... ..
.... ............
..... ...
... ......
..... ..
......
....
....
......
...
.....
..
....
...
......
.
......
.
........
.
.
.
... ...
... .......
.
.
.
.
..
... ........
....... ....
........
...
........
..........
..
...
..........
................
...
...
......................................................
...
...
...
...
.
.
.....
....
.....
....
.....
.....
......
......
......
......
.
........
.
.
.
.
.
...
..........
..............................................
1/2
T (C)
−1
O
C
1
x
−1
Figura 1.1: Ação da transformação T (x, y) = (x, y/2) sobre uma circunferência.
Na figura está representada uma circunferência C de equação x2 + y 2 = 1 e a sua tranformação T (C). Para descobrir a equação de T (C) substitui-se na equação de C as coordenadas x e y pelas expressões em termos de x1 e y1 , ou seja, x = x1 e y = 2y1 obtendo
x21 + (2y1 )2 = 1 ⇐⇒ x21 + 4y12 = 1
Ou seja, T , ao comprimir verticalmente a circunferência C, a leva a uma elipse de semi1
eixos a = 1 e b = .
2
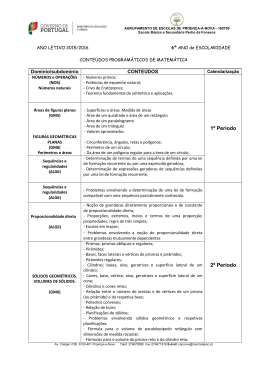
Exemplo 1.2.3. Consideremos a transformação do plano T : R2 → R2 definida por
(
)
x−y x+y
√ , √
T (x, y) =
2
2
√
Seja r = {(x, y)|x = y} a reta diagonal. A imagem de (x, x) por T é (0, 2x). Logo essa
imagem está no eixo Oy.
Agora, todo ponto
do eixo
(
) Oy é imagem
( por T de
) um ponto da reta. De fato, dado
y y
y y
(0, y) ∈ 0y, seja √ , √
∈ r. Temos T √ , √
= (0, y). Além disso, T : r → Oy é
2 2
2 √2
√
injetiva, pois T (x, x) = T (z, z) ⇒ (0, 2x) = (0, 2z) ⇒ x = z ⇒ (x, x) = (z, z). Logo T
leva a reta r bijetivamente sobre a reta Oy. Veja ilustração na Figura 1.2.
Isometrias no plano
10
y
..
.....
.....
.....
.....
.
.
.
....
.....
.....
.....
.....
.
.
.
.
....
.....
.....
.....
.....
.
.
.
.
.....
.....
.....
.....
.....
.
.
.
....
.....
.....
.....
.....
.
.
.
.
....
.....
.....
.....
.....
.
.
.
.
.....
.....
.....
.....
.....
.
.
.
....
.....
.....
.....
.....
.
.
.
.
...
.....
.....
.....
T
←−
O
(
Figura 1.2: Ação da transformação T (x, y) =
1.3
x
x−y x+y
√ , √
2
2
)
sobre uma reta.
Isometrias e propriedades geométricas
Dentre as transformações no plano, nos interessa estudar aquelas que preservam a congruência de triângulos. Assim, vamos colocar condições sobre uma transformação T : R2 →
R2 de modo que, para qualquer triângulo 4 do plano, T (4) é um triângulo congruente ao
primeiro. Uma condição geral é dada pela
Definição 1.3.1. Denomina-se isometria do plano R2 a uma transformação T : R2 → R2
que preserva distâncias. Ou seja, T é uma isometria quando
d(T (P ), T (Q)) = d(P, Q)
para quaisquer pontos P , Q do plano R2 .
Exemplo 1.3.2. Consideremos a transformação do plano T : R2 → R2 definida por
(
)
x−y x+y
√ , √
T (x, y) =
2
2
Ela já foi estudada no Exemplo 1.2.3. Mostremos que ela é uma isometria. Sejam
A = (a, b) e B = (c, d) pontos de R2 . Temos
((
) (
))2
a
−
b
c
−
d
a
+
b
c
+
d
√ , √
d(T (A), T (B))2 = d
, √ , √
=
2
2
2
2
1
1
[(a − b − c + d)2 + (a + b − c − d)2 ] = [((a − c) − (b − d))2 + ((a − c) + (b − d))2 ] =
2
2
1
2
[(a − c) − 2(a − c)(b − d) + (b − d)2 + (a − c)2 + 2(a − c)(b − d) + (b − d)2 ] =
2
1
[2(a − c)2 + 2(b − d)2 ] = (a − c)2 + (b − d)2
2
Logo
√
d(T (A), T (B)) = (a − c)2 + (b − d)2 = d((a, b), (c, d)) = d(A, B)
Isometrias no plano
11
Exemplo 1.3.3. Sejam a e b números reais. Consideremos a transformação do plano T :
R2 → R2 definida por
T (x, y) = (x + a, y + b)
Essa transformação é chamada translação. Vamos provar que ela é uma isometria.
Sejam A = (c, d) e B = (e, f ) dois pontos de R2 , então
d(T (A), T (B))2 = d((c + a, d + b), (e + a, f + b))2 = (c + a − e − a)2 + (d + b − f − b)2 =
(c − e)2 + (d − f )2
Logo
d(T (A), T (B)) =
√
(c − e)2 + (d − f )2 = d(A, B)
Vejamos agora propriedades básicas das isometrias.
Proposição 1.3.4. Toda isometria T : R2 → R2 é injetiva.
Prova: Supondo que T (P ) = T (Q), pela definição de isometria temos d(P, Q) = d(T (P ), T (Q)) =
0. Então P = Q, concluindo que T é injetiva.
Lembremos que um ponto R está no segmento P Q se e somente se d(P, R) + d(R, Q) =
d(P, Q).
Proposição 1.3.5. Sejam P e Q pontos distintos de R2 e T : R2 → R2 uma isometria.
Então T leva o segmento P Q sobre o segmento T (P )T (Q).
Prova: Seja R um ponto do segmento P Q. Temos que d(P, Q) = d(P, R) + d(R, Q). Como
por hipótese T é uma isometria, então d(T (P ), T (Q)) = d(T (P ), T (R)) + d(T (R), T (Q)).
Assim o ponto T (R) pertence ao segmento de reta T (P )T (Q).
Seja agora S um ponto de T (P )T (Q). Seja d = d(T (P ), S). Seja R o ponto de P Q tal
que d(P, R) = d. Esse ponto existe, pois d ≤ d(T (P ), T (Q)) = d(P, Q). Notemos agora que
T (R) é um ponto do segmento T (P )T (Q) e que d(T (P ), T (R)) = d(P, R) = d. Logo S e
T (R) são pontos do segmento T (P )T (Q) à mesma distância de T (P ). Portanto T (R) = S,
e assim provamos que T leva o segmento P Q sobre o segmento T (P )T (Q).
A propriedade acima mostra que toda isometria leva pontos colineares em pontos colineares, mantendo a sua ordenação e suas distâncias. Notemos também que a imagem por uma
isometria de três pontos A, B e C não colineares não são colineares. Por exemplo, se T (B)
estivesse entre T (A) e T (C), terı́amos d(T (A), T (B)) + d(T (B), T C)) = d(T (A), T (C)). Mas
d(A, B) + d(B, C) > d(A, C), contrariando a definição de T .
Proposição 1.3.6. A imagem de uma reta por uma isometria é também uma reta.
Prova: Seja r uma reta. Tomamos dois pontos P e Q em r, e sejam P 0 = T (P ) e Q0 = T (Q)
as suas imagens pela isometria T . Chamamos de r0 a reta que passa pelos pontos P 0 e Q0 .
Vamos provar que T (r) = r0 .
Isometrias no plano
12
Seja T (R) ∈ T (r), com R ∈ r. Suponhamos que R está entre P e Q, ou seja, R pertence
ao segmento P Q. Pela Proposição 1.3.5, sua imagem R0 está no segmento P 0 Q0 , ou seja,
R0 pertence à reta r. Suponhamos que P está entre R e Q. Portanto, P 0 está no segmento
R0 Q0 , ou seja, P 0 pertence à reta determinada por R0 e Q0 . Mas essa é a mesma reta r. Logo
R0 ∈ r. O outro caso é análogo. Provamos que T (r) ⊂ r0 .
Reciprocamente, seja R0 um ponto da reta r0 . Se R0 está no segmento P 0 Q0 , já vimos que
existe um ponto R do segmento P Q tal que T (R) = R0 . Suponhamos que P 0 está entre R0 e
Q0 . Seja R o ponto da reta r tal que P está entre R e Q e d(R, P ) = d(R0 , P 0 ). Já sabemos
que T (R) está na reta r0 e que P 0 está entre T (R) e Q0 . Como T é isometria, sua distância
a P 0 é a mesma que a de R0 . Portanto T (R) = R0 e R0 ∈ T (R). De modo análogo tratamos
o caso em que Q0 está entre P 0 e R0 . Assim r0 ⊂ T (R).
Provamos que T (r) = r0 , e terminamos.
Vemos
nessa
demonstração
que
se
T
é
uma
isometria,
então,
dados
dois
pontos
A
e
(−→)
(←→)
−−−−−−−→
←−−−−−→
B, T AB = T (A)T (B). Ainda, T AB = T (A)T (B), isto é, T leva semirreta sobre
semirreta.
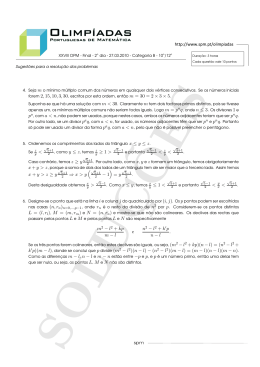
Proposição 1.3.7. As imagens de retas paralelas por uma isometria são também retas
paralelas.
Prova: Seja T : R2 → R2 uma isometria. Tomemos r e s duas retas paralelas e suas
imagens r0 = T (r) e s0 = T (s). Suponhamos que r0 e s0 não sejam paralelas. Então existe
P 0 pertencente a r0 e a s0 . Sejam P ∈ r e Q ∈ s tais que T (P ) = P 0 e T (Q) = P 0 . Pela
Proposição 1.3.4, T é injetiva. Isso implica que P = Q, ou seja, r e s têm um ponto em
comum, absurdo. Portanto r0 e s0 são paralelas.
Confira ilustração na Figura 1.3.
A Proposição acima não significa que a imagem de uma reta r por uma isometria T seja
uma reta s paralela a r. Vimos, no Exemplo 1.2.3, uma transformação T que leva a reta
x = y no eixo Oy.
Proposição 1.3.8. Seja ABC um triângulo retângulo com ângulo reto em A. Sua imagem
por uma isometria é o triângulo retângulo T (A)T (B)T (C) com ângulo reto em T (A).
Prova: Sejam T : R2 −→ R2 uma isometria e ABC um triângulo retângulo. Tomamos
A1 = T (A), B1 = T (B) e C1 = T (C). Pelo Teorema de Pitágoras temos
d(B, C)2 = d(A, B)2 + d(A, C)2
Como T é uma isometria e, portanto, preserva distância, vem
d(B1 , C1 )2 = d(A1 , B1 )2 + d(A1 , C1 )2
Em virtude da recı́proca do Teorema de Pitágoras, A1 B1 C1 é um triângulo retângulo com
hipotenusa B1 C1 .
Isometrias no plano
13
y
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
.
...
...
...
...
...
...
...
...
...
...
.
T
←−
O
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
x
Figura 1.3: Toda isometria leva retas paralelas em retas paralelas.
Pode-se dizer também que T transforma retas perpendiculares em retas perpendiculares
preservando os ângulos retos. Na verdade, em geral, toda isometria preserva a medida de
ângulos. Da Geometria Euclidiana, um ângulo é a reunião de duas semirretas com origem
comum e não pertencentes à mesma reta.
Proposição 1.3.9. Dado um ângulo ∠ABC e uma isometria T , então T (∠ABC) é o ângulo
∠T (A)T (B)T (C), e ambos são congruentes.
Prova: Dado um ângulo ∠ABC, os pontos A, B e C não são colineares. Logo, os pontos
T (A), T (B) e T (C) não são colineares. Como T leva semirreta sobre semirreta, então T leva
∠ABC sobre ∠T (A)T (B)T (C). Por outro lado, o triângulo ABC é congruente ao triângulo
T (A)T (B)T (C) pelo caso LLL. Assim seus ângulos correspondentes têm a mesma medida.
Terminamos a demonstração.
Proposição 1.3.10. Toda isometria T : R2 −→ R2 é sobrejetiva (sua imagem é R2 ).
Prova: Seja T : R2 → R2 uma isometria e P 0 um ponto de R2 . Sejam A e B pontos
diferentes de R2 . Sabemos que toda isometria é injetiva, assim T (A) 6= T (B). Se T (A) = P 0
ou T (B) = P 0 , terminamos. Suponhamos T (A) 6= P 0 e T (B) 6= P 0 . Ponhamos T (A) = A0
e T (B) = B 0 . Existem apenas dois casos para os pontos A0 , B 0 e P 0 , eles são colineares ou
não. Se A0 , B 0 e P 0 forem colineares, então estão em uma reta s, que é imagem da reta r
que contém A e B. Logo existe P ∈ r tal que T (P ) = P 0 . Suponhamos agora que A0 , B 0
e P 0 não são colineares, e consideremos o 4P 0 A0 B 0 . Construı́mos no lado AB os triângulos
4P AB e 4QAB congruentes a 4P 0 A0 B 0 , com P e Q em semiplanos opostos em relação à
Isometrias no plano
14
−→ −→
reta AB. As semirretas AP e AQ são levadas em semirretas diferentes com origem A0 , pois
T é injetiva, P 6= Q e AP = AQ. Além disso elas formam ângulos de mesma medida que
∠P 0 A0 B 0 com a semirreta A0 B 0 . Logo, como T preserva distância, T (P ) = P 0 ou T (Q) = P 0 .
Proposição 1.3.11. A inversa de qualquer isometria é também uma isometria.
Prova: Seja T : R2 → R2 uma isometria. Como T é bijetiva, ela tem uma transformação
inversa T −1 : R2 → R2 . Provemos que T −1 também preserva distância. Sejam A e B
pertencente a R2 . Então
d(T −1 (A), T −1 (B)) = d(T (T −1 (A), T (T −1 (B)) = d(A, B)
Logo T −1 é uma isometria.
Proposição 1.3.12. A composta de duas isometrias é também uma isometria.
Prova: Sejam T : R2 → R2 e S : R2 → R2 duas isometrias e A e B dois pontos de R2 .
Temos d((T ◦ S)(A), (T ◦ S)(B)) = d(T (S(A)), T (S(B)) = d(S(A), S(B)) = d(A, B).
Portanto a composta de suas isometrias é uma isometria.
Investigando as isometrias, percebemos logo que seus pontos fixos têm um papel importante no seu estudo. Na verdade, existem poucos tipos de isometrias, conforme veremos. Os
pontos fixos de uma isometria determinam seu tipo.
Definição 1.3.13. Seja T : R2 → R2 uma transformação. Chamamos de ponto fixo de T a
todo o ponto P tal que T (P ) = P .
Quantos pontos fixos pode ter uma isometria? Quais são as propriedades dos pontos
fixos de uma isometria?
Proposição 1.3.14. Se A e B são pontos fixos de uma isometria T , então todos os pontos
da reta que passa por A e B são fixos.
Prova: Sabemos que T transforma a reta r que passa por A e B na reta que passa por T (A)
e T (B). Uma vez que A e B são pontos fixos, a reta r é levada sobre si mesma. Seja P um
ponto qualquer de r. Suponha que P está entre A e B. Sabemos que T (P ) está entre A e B.
Como AP = T (A)T (P ) = AT (P ) e como P e T (P ) estão na mesma semirreta com origem
A, são o mesmo ponto, isto é, T (P ) = P .
A demonstração para P em outras posições é análoga.
Proposição 1.3.15. Sejam S e T isometrias e r uma reta do plano. Se existirem pontos
A 6= B em r tais que S(A) = T (A) e S(B) = T (B) então S(X) = T (X) para todo X ∈ r.
Isometrias no plano
15
Prova: Com efeito, nesse caso a isometria R = T −1 ◦ S é tal que R(A) = A e R(B) = B.
Pela Proposição 1.3.14, todo ponto de r é fixado por R, ou seja S = T em r.
Lembremos que a transformação T : R2 → R2 definida por T (P ) = P para todo P ∈ R2
chama-se identidade. Portanto a identidade do plano é uma isometria que fixa todos os
pontos. Indicaremos a identidade de R2 por Id.
Veremos que isometrias diferentes podem fixar, simultaneamente, no máximo, os pontos
de uma reta. Para ver isso façamos primeiro o
Teorema 1.3.16. Se uma isometria T fixa três pontos não colineares, então T é a identidade.
Prova: Seja A, B e C três pontos fixos não colineares da isometria T . Do teorema anterior
concluı́mos que T fixa as retas que contêm AB, AC e BC. Seja P um ponto fora dessas
retas e seja Q um ponto entre A e B (diferente de A e B). A reta r determinada por P e
Q intercepta um dos outros dois lados do triângulo ABC em um ponto R (Propriedade de
Pach). Logo r tem dois pontos fixados por T , a saber, Q e R. Pelo teorema anterior T fixa a
reta r e portanto fixa o ponto P. Uma vez que P foi escolhido arbitrariamente, T fixa todos
os pontos do plano, ou seja, T é a identidade.
Teorema 1.3.17. Se duas isometrias T e S coincidem em três pontos não colineares, então
T = S.
Prova: Vimos que toda isometria é uma bijeção do plano, logo tem inversa, e sua inversa é
uma isometria. Sabemos também que a composta de duas isometrias é uma isometria. Logo
T ◦ S −1 é uma isometria.
Sejam então A, B e C os três pontos não colineares fixados por T e S simultaneamente.
Notemos que S −1 também fixa esses três pontos. Logo T ◦ S −1 fixa esses três pontos. Pela
Teorema 1.3.16 T ◦ S −1 = Id. Logo T = S.
Assim, podemos classificar as isometrias em três tipos diferentes não triviais com 2 pontos fixos (e, portanto, com uma reta fixa), com 1 ponto fixo e com nenhum ponto fixo.
É interessante notar que esses resultados só dependem dos axiomas básicos da Geometria
Euclidiana.
Veremos a seguir que a imagem de um triângulo por uma isometria é um triângulo
congruente ao primeiro. Esse é o primeiro passo para fazermos uma leitura diferente do
conceito de congruência estudado na Geometria de posição. Ali vimos que dois triângulos
são congruentes quando existe uma correspondência entre seus vértices e que os seis pares
de elementos correspondentes (lados e ângulos) têm a mesma medida. Essa é uma definição
estática. O estudo das isometrias nos dá a oportunidade de refazer esse conceito sob um
ponto de vista de movimentos.
O primeiro passo para fazer isso é:
Teorema 1.3.18. A imagem de um triângulo por uma isometria é um triângulo congruente
ao primeiro.
Isometrias no plano
16
Prova: Seja T uma isometria. Seja ABC um triângulo. Como os pontos A, B e C são
não colineares, os pontos T (A), T (B) e T (C) são não colineares, conforme foi observado
acima logo após a Proposição 1.3.5. Portanto T (A)T (B)T (C) é um triângulo. Como AB =
T (A)T (B), etc, os lados correspondentes desses triângulso são congruentes. Logo, pelo caso
LLL, ABC e T (A)T (B)T (C) são congruentes.
Provaremos na seção seguinte que se dois triângulos são congruentes existe uma isometria
que leva um sobre o outro.
1.4
Reflexões e propriedades geométricas
As reflexões constituem um tipo importante de isometria. Vejamos primeiro sua definição.
Definição 1.4.1. Sejam P e P 0 pontos e r uma reta do plano R2 . Dizemos que P 0 é simétrico
a P se r for a mediatriz do segmento P P 0 . No caso de P pertencer à reta r o simétrico de
P será o próprio P .
Definição 1.4.2. Dada uma reta r, chama-se reflexão em torno da reta r a transformação
T tal que a todo ponto P de R2 o ponto P 0 = T (P ) é o simétrico de P em relação a r.
Confira a Figura 1.4. A reta r chama-se reta de simetria de T .
P
·
r
.................................................................................................................................................................................................................................................................
T (P )
·
Figura 1.4: Reflexão em torno da reta r.
Observemos que a reflexão em torno de uma reta r fixa os pontos de r e nenhum outro.
Na verdade, essa transformação é uma isometria, e assim é um dos três tipos de isometria
citados anteriormente.
Teorema 1.4.3. Toda reflexão é uma isometria.
Prova: Seja T : R2 → R2 uma reflexão em torno da reta r e P e Q dois pontos de R2 .
Temos essencialmente quatro possibilidades de posições dos pontos P e Q com relação a r.
Caso 1. Os pontos P e Q estão na reta r.
Como T (P ) = P e T (Q) = Q então T (P )T (Q) = P Q.
Caso 2. O ponto P está na reta r e Q não.
Isometrias no plano
17
Seja M o ponto médio do segmento QT (Q). Se P está no segmento QT (Q), então
P = M é o ponto médio desse segmento. Logo P Q = P T (Q). Como T (P ) = P , vem
T (P )T (Q) = P Q. Se P não está no segmento QT (Q), consideremos o triângulo P QT (Q).
A mediana P M relativa ao lado QT (Q) coincide com a altura. Logo esse triângulo é isósceles,
de base QT (Q). Assim P Q = T (P )T (Q). Confira a Figura 1.5, desenho à esquerda.
Caso 3. Os pontos P e Q estão no mesmo lado da reta r.
Sejam M e N os pontos em que P T (P ) e QT (Q) interceptam r, respectivamente. Suponhamos primeiro que P e Q estão em uma reta perpendicular a r. Então M = N . Sem
perda de generalidade, suponhamos que P está entre Q e M . Então P Q = QM − P M =
T (Q)M − T (P )M = T (Q)T (P ).
Q
Q
.
.........
....... ....
.......
...
.......
.
.......
.
.
.
.
.
....
.
..
.......
...
.......
.
.
...
.
.
.
.
.....
.
.
...
.
.
.
.
.....
...
.
.
.
.
.
.
...
.....
.
.
.
.
.
.
...
.....
.
.
.
.
.
.
...
.....
.
.
.
.
.
.
...
.....
.
.
.
.
.
.
...
.....
.
.
.
.
...
.
.
.....
.
.
.
...
.
.
.
.....
.
.
.
...
.
.
.
.....
.
...
.
.
.
.
.
.....
.
.
.
.
.
.
.
.........................................................................................................................................................................................................................................................................
.......
...
.......
.......
...
.......
...
.......
...
.......
.......
...
.......
...
.......
.......
...
.......
...
.......
.......
...
.......
...
.......
.......
.....
.......
.......
...
.......
...
.......
.......
....
.......
.......
..
........
....... ....
.........
.
P
M
r
.......................
...................
...
...................
...
....................
...................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
............
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.......
...
.............................
...
... ...............
..........
...
...
..........
...
...
..........
...
..........
...
..........
...
...
..........
...
..........
...
.
.
...
..........
...
.
.
.
.
...
.
.
..........
...
..........
...
...
..........
...
...
..........
..........
...
.......... .....
.
.
.
.
.
.............................................................................................................................................................................................................................................................................
.
..
.
.
...
........
....
...
..........
...
..........
...
..........
.
.
.
...
.
.
...
.
.
.
.
......
.
.
.
.
...
.
.
.
.
.
....
.......
.
.
...
.
.
.
.
.
...
.
.
.......
...
.
.
.
.
.
...
.
.
.
.
...
......
.
.
.
.
...
.
.
.
.
.
.......
.
.
...
....
.
.
.
.
.
.
.
.......
...
...
.
.
.
.
.
.
.
.
.
.....
.....
.......................
....................
...
....................
...
....................
....................
....
....................
...
....................
....................
.................... ....
............
P
M
N
r
T (P )
T (Q)
T (Q)
Figura 1.5: Casos 2 (à esquerda) e 3 (à direita).
Suponhamos agora que P e Q não estão em uma reta perpendicular a r. Tomemos os
triângulos M P N , M T (P )N , N T (Q)T (P ) e N QP . Como r é mediatriz de P T (P ) então
T (P )N = P N . Logo P N T (P ) é isósceles com base P T (P ). Logo a mediatriz da base é
bissetriz do vértice oposto, ou seja, ∠P N M ∼
= ∠T (P )N M , o que implica que seus com∼
plementares são congruentes, isto é, ∠P N Q = ∠T (P )N T (Q). Assim os triângulos P N Q e
T (P )N T (Q) são congruentes por LAL. Portanto P Q = T (Q)T (P ). Confira a Figura 1.5,
desenho à direita.
Caso 4. Os pontos P e Q estão em lados opostos da reta r.
Observemos que T (P ) e T (Q) também estão em lados opostos em relação à reta r. Sejam
M e N os pontos em que P T (P ) e QT (Q) interceptam r, respectivamente. Suponhamos
primeiro que P e Q estão em uma reta perpendicular a r. Então M = N . Procedendo de
modo análogo ao que foi feito no caso 3, provamos que P Q = T (P )T (Q).
Suponhamos agora que P e Q não estão em uma reta perpendicular a r. Sejam S, M
e N os pontos em que os segmentos P Q, P T (P ) e QT (Q) interceptam r, respectivamente.
Isometrias no plano
18
T (Q)
.
.......
..... ..
..... ....
.....
...
.....
.
.
...
.
.
..
...
.....
.....
.
.
.......
.
....
.
...
.
.
... .......
.
...
.
....
.
... .......
.
...
.
.
.....
...
.
...
.
...
.
.
.
.
.....
...
...
...
.
.....
.
.
.
.....
...
...
....
.
.
.
.
.
.....
...
....
.
.
.
.
.
.....
.
.
.....
...
..
.
.
.
.
.
...
.
.
.
...
.....
....
.
.
...
.....
.
...
.
...
.....
.
.
.
...
.
....
.
.....
...
.
.....
.
...
.
...
.
..... .......
.
.
.
.
............................................................................................................................................................................................................................................................................
.
.
...
.
.
...
... ........
.
.
.
...
...
.
.....
..
...
.....
...
.....
.....
.....
.
...
.
.
....
.
.....
...
.
...
.
.
.
.
...
.
.
.....
....
...
.
.
.
...
.
.
.
.
.....
...
....
.
.
.
.
.
....
.
.
.....
...
...
.
.
.
...
.
.
.
.....
...
....
.
.
...
.
.
.
.
.
.....
... ......
...
.
.
.
.
.
... ....
.....
...
.....
.........
.....
...
.....
.....
.....
.....
...
.....
.....
..... ....
..... ..
.......
..
P
M
S
N
r
T (P )
Q
Figura 1.6: Caso 4.
Tomemos agora os triângulos P M S e T (P )M S. Eles são congruentes pelo caso lado-ângulolado. Logo P S = T (P )S. Analogamente os triângulos QN S e T (Q)N S são congruentes.
Logo QS = T (Q)S. Confira a Figura 1.6.1.3.18
Vamos provar agora que S está entre T (P ) e T (Q). Como SM é mediatriz da base P T (P )
do triângulo isósceles P T (P )S, ela é também bissetriz. Da mesma forma SN é bissetriz do
vértice S do triângulo isósceles QT (Q)S. Como ∠P SM ∼
= QSN pois são opostos pelo
∼
vértice, segue que ∠T (P )SM = T (Q)SN . Como esses ângulos já têm um lado na mesma
reta, o outro também está. Portanto S está entre T (P ) e T (Q).
Observemos agora que os triângulos P ST (Q) e T (P )SQ são congruentes por LAL. Segue
que P Q = T (P )T (Q).
Provamos em todos os casos que P Q = T (P )T (Q), e assim toda reflexão é uma isometria.
Pode ser útil o seguinte resultado:
Proposição 1.4.4. Sejam P e P 0 dois pontos de R2 . Então existe uma única reflexão
levando P em P 0 .
Prova: Consideremos a mediatriz r do segmento P P 0 . Seja T a reflexão em torno da reta
r. Então T (P ) = P 0 .
Vamos provar que esta é a única reflexão levando P em P 0 . Seja então uma reflexão S
em torno da reta s tal que S(P ) = P 0 . Como P 0 é o simétrico de P em relação a s, essa reta
é a mediatriz de P P 0 . Mas um segmento tem uma única mediatriz. Portanto r = s, do que
segue S = T .
Vejamos agora como levar um triângulo sobre outro congruente a ele. Começaremos com
o caso muito particular em que os dois triângulos têm em comum um lado.
Proposição 1.4.5. Se dois triângulos diferentes e congruentes têm um lado em comum,
então existe uma reflexão levando um sobre o outro.
Isometrias no plano
19
Prova: Sejam ABC e ABD dois triângulos com lado comum AB. Então C e D estão em
lados opostos em rela cão à reta suporte r de AB. Confira a Figura 1.7.
C
........
...... .........
......
.....
......
.....
.
.
.
.
.
.
.....
......
.....
......
.
.
.....
.
.
.
.....
....
.
.
.
.
.
.....
....
.
.
.
.....
.
.
....
.....
.
.
.
.
.
..
.........
....
......
.....
......
.....
.
......
.
.
.
......
...
.
.
.
......
.
..
......
.....
......
.....
......
.....
......
.....
......
...... .........
........
A
B
D
Figura 1.7: Ilustração da Proposição 1.4.5.
Como os triângulos ABC e ABD são congruentes pelo caso LLL, temos que os ângulos
∠BAC e ∠BAD são congruentes. Logo AB é bissetriz do vértice do triângulo isósceles
ACD. Então é também mediatriz da sua base, isto é, de CD. Provamos que D é o simétrico
de C em relação à reta r.
Consideremos agora a reflexão T em torno de r. Vemos que T leva o triângulo ABC
sobre o triângulo ABD.
Proposição 1.4.6. Se dois triângulos congruentes têm em comum apenas um vértice, então
existe uma isometria levando um sobre o outro. Essa isometria é uma reflexão ou a composta
de duas reflexões.
Prova: Sejam ABC ∼
= ADE triângulos congruentes. Seja r a reta bissetriz do ângulo
∠BAD, e seja T a reflexão em torno dessa reta. Notemos que AB = AD, e então D é o
simétrico de B em relação a r. Portanto T (ABC) é um triângulo ADC 0 congruente a ABC
e a ADE e que tem com ADE o lado comum AD. Se E = C 0 , então T (ABC) = ADE, e
terminamos. Se E 6= C 0 , aplicamos a Proposição 1.4.5, e existe uma reflexão levando ADC 0
sobre ADE. Assim a composta das duas reflexões leva ABC sobre ADE. Confira a Figura
1.8.
r...
....
.
.....
.....
.....
.....
.
.
.
.
....
.....
.....
.....
... ..............
.....
.......
...
.....
.......
.
.
..
.
.
.
........ .....
........
...
...
..... ..............
.....
...
......
.....
.
.
...
.
.
......
.
.
......
.....
...
.....
.....
.
.
.
..
.
.
.
.
.
.
....
.....
..
.....
.....
..
......
.....
...
.....
......
......
...
..... ..........
.
....... ....
.
..
.
.
.
.
.......
...
......
.......
.....
...
...
.... ..........
.......
.
.
.
..
.
.
...
.
.
.
.
.
.
.. ...
.....
...
...
..... .....
.......
...
... ......... .......... .............
.
...
.. ....... ........ ............
.
...
.. ............... ..........
...
.
...
.. ............... ...........
.
. ...................
...
.
.
...
............................
.
.
..
.............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.........
.
...
.
.
.
.
....
.
.
.
.....
D
E
B
A
C
Figura 1.8: Ilustração da Proposição 1.4.6.
Conforme prometemos, temos agora o
Isometrias no plano
20
Teorema 1.4.7. Dados dois triângulos congruentes, existe uma isometria que leva um sobre
o outro. Essa isometria pode ser a identidade, uma reflexão, ou a composta de duas ou três
reflexões.
Prova: Sejam ABC e DEF triângulos congruentes. Se forem iguais, a isometria é a identidade. Suponhamos que sejam diferentes. Se tiverem um lado em comum, pela Proposição
1.4.6, existe uma reflexão que leva um sobre o outro. Se tiverem apenas um vértice em
comum, pela Proposição 1.4.5, existe uma isometria que leva um sobre o outro e que é uma
reflexão ou uma composta de duas reflexões. Se os dois triângulos não têm vértice em comum, consideramos dois deles, por exemplo, A e D, e tomamos a reflexão que leva A em
D (Proposição 1.4.4). Obtemos dois triângulos congruentes que satisfazem um dos casos
acima.
Teorema 1.4.8. Toda isometria é a identidade, uma reflexão, ou a composta de duas ou
três reflexões.
Prova: Seja T uma isometria diferente da identidade. Seja ABC um triângulo qualquer.
Sabemos que T (A)T (B)T (C) é um triângulo congruente ao primeiro (Teorema 1.3.18, página
15). Logo, pelo Teorema 1.4.7, existe uma isometria S levando ABC sobre T (A)T (B)T (C),
e essa isometria é uma reflexão, ou a composta de duas ou três reflexões. Examinado as
demonstrações do referido Teorema e das proposições que a antecedem, vemos que podemos
construir S de modo que S(A) = T (A), S(B) = T (B) e S(C) = T (C). Logo T e S coincidem
em três pontos não colineares. Pelo Teorema 1.3.17 temos T = S, o que termina a demonstra
cão.
1.5
Translações e propriedades geométricas
Já vimos no Exemplo 1.3.3 a
Definição 1.5.1. Sejam a e b números reais. A transformação do plano T : R2 → R2
definida por T (x, y) = (x + a, y + b) chama-se translação determinada por (a, b).
Já vimos também no Exemplo 1.3.3 que
Proposição 1.5.2. Toda translação é uma isometria.
→
Olhando −
v = (a, b) como um vetor, a translação determinada por (a, b) pode ser definida
→
por Tv (A) = A + −
v . Ela desloca todos os pontos do plano na mesma direção e na distância
→
|−
v |.
Veremos o seguinte resultado:
Teorema 1.5.3. Toda translação que não é a identidade é igual à composta de duas reflexões
em torno de duas retas paralelas.
Isometrias no plano
21
y
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
..
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
..
Ts ◦ Tr (P )
·
0
·
Tr (P )
·P
x
Figura 1.9: Toda translação é igual à composta de duas reflexões.
Prova: Seja TV : R2 → R2 , TV (x, y) = (x + a, y + b), com V = (a, b) 6= (0, 0). Seja r a reta
(
)
←→
que passa pela origem O = (0, 0) e é perpendicular a OV , e seja s a reta que passa por a2 , 2b
←→
e também é perpendicular a OV . Se d = |V |, então a distância entre as retas r e s é d2 .
Sejam Tr a reflexão em torno de r e Ts a reflexão em torno de s. Seja P um ponto
qualquer de R2 . Temos TV (P ) = Ts ◦ Tr (P ).
Vejamos o caso em que P está no semiplano determinado por r que não contém s e tal
que d(P, r) = α < d2 . Então d(Tr (P ), s) = d2 − α, e d(Ts (Tp (P )), P ) = d(Ts (Tp (P )), s) +
−−−−−−−−→
d(s, Tr (P )) + d(Tr (P ), P ) = d2 − α + d2 − α + 2α = d. Além disso P Ts (Tr (P )) tem a direção
−−→
de OV . Logo Ts ◦ Tr (P ) = TV (P ).
Os outros caos são análogos, apenas ocorrem mudanças de sinais.
1.6
Rotações e propriedades geométricas
As rotações constituem um tipo especial de isometria. Veremos algumas propriedades.
Definição 1.6.1. Sejam C um ponto de R2 e α ∈ [0, 2π) um ângulo. A rotação R : R2 → R2
é uma transformação do plano definida da seguinte forma: R(C) = C, e se P 6= C é um
ponto qualquer de R2 , R(P ) é o ponto tal que CR(P ) = CP e a medida do ângulo ∠P CR(P )
−→
no sentido horário a partir da semirreta CP é α.
Isometrias no plano
22
Vejamos primeiro o
Teorema 1.6.2. Toda rotação é uma isometria.
Prova: Seja R uma rotação de centro C e ângulo α. Sejam P e Q dois pontos quaisquer
do plano. Se P = C e Q 6= C, temos R(P )R(Q) = CR(Q) = CQ = P Q, por definição
de rotação. O mesmo ocorre se P 6= C e Q = C. Suponhamos P 6= C e Q 6= C. Se
C, P e Q forem colineares, então C, R(P ) e R(Q) são colineares. Como CP = CR(P ) e
CQ = CR(Q), então R(P )R(Q) = P Q.
Suponhamos que C, P e Q não são colineares. Temos a situação da Figura xxxx. Os
triângulos P CQ e R(P )CR(Q) são congruentes pelo caso LAL, pois CP = CR(P ), CQ =
CR(Q) e ∠P CQ ∼
= ∠R(P )CR(Q), pois ambos medem α. Logo R(P )R(Q) = P Q, e R é
uma isometria.
y
R(Q)
...
......
... ..
... ....
.
.
.. ..
... ...
...
.
...
...
...
..
.
.
..
..
.
.
.
.
..
...
...
...
...
..
...
..
...
.
.
.
.
...
....
...
........
...
........
........
...
... ...............
.
.
.. .....
... .......
.............................................................
.............................................................................
.
.........
.......
.......
.........
.......
.........
.......
.........
.
.
.
.
.
.
..
.........
....................
R(P )
C
Q
P
O
x
Figura 1.10: Ilustração do Teorema 1.9.1.
1.7
Isometrias em coordenadas
Estivemos estudando as isometrias sob um ponto de vista geométrico. Mas as isometrias
podem ser expressas através de equações em um sistema de coordenadas cartesianas, e podemos com isso fazer um estudo algébrico das isometrias. Essa expressão é bem próxima
das equações de mudança de coordenadas. De fato, uma isometria é uma mudança de coordenadas, pois leva os eixos de um sistema em duas retas perpendiculares, definindo assim
outro sistema de coordenadas. Seguiremos de perto o texto [4], páginas 117 a 122, e depois
143 e 144.
Primeiro vamos exprimir as coordenadas de um ponto usando o produto interno de vetores. Seja OXY um sistema de eixos ortogonais e sejam e1 = (1, 0) e e2 = (0, 1) os vetores
unitários dos eixos 0X e 0Y respectivamente. Dizer que (x, y) são as coordenadas do ponto
P é o mesmo que afirmar
−→
OP = xe1 + ye2
Isometrias no plano
23
−→
Temos he1 , e1 i = he2 , e2 i = 1 e he1 , e2 i = 0, e então hOP , e1 i = xhe1 , e1 i + yhe2 , e1 i = x e
−→
analogamente hOP , e2 i = y.
Assim obtemos as coordenadas de um ponto P em um sistema de eixos ortogonais OXY
−→
fazendo os produtos internos do vetor OP pelos vetores unitários do eixos
−→
−→
x = hOP , e1 i e y = hOP , e2 i.
Tomemos agora O0 X 0 Y 0 um outro sistema de eixos ortogonais quaisquer do plano. Seja f1
e f2 os vetores unitários de O0 X 0 e O0 Y 0 respectivamente. Chamemos de (a, b) as coordenadas
do ponto O0 no sistema OXY e de α o ângulo tal que ao girar o eixo OX (de OX para OY )
coincida com O0 X 0 . Assim α é o ângulo de e1 para f1 . Então
f1 = (cos α)e1 + (sen α)e2
Y
Y0
e2 ↑
f1
f. 2
.
.....
...
%
.
.....
.
.
..... α.......... .....
........................... ........
... .. .......
......
... .... ...
....
..... .... α →
...
......
...
...O
e1
.......
.................. ...
.....
◦
.
.
α + 180
.....
.....
&
.
f2
...
.....
.....
.....
.....
.
.
.
....
.....
.....
.....
.....
.
.
.
.
....
.....
.....
.....
.....
.
.
.
.
.....
.....
.....
.....
.....
.....
.....
.
.
.....
.
....
.....
.....
.....
.....
.....
.....
.....
.....
.....
.
.
.
.
.....
....
.....
.....
.....
.....
.....
.....
.....
.....
.
.....
.
.
.
.....
...
.....
.....
.....
.....
.....
.....
..... .........
.........
.
.........
..... .........
.....
.....
.....
.....
.
.
.
.
.....
.
.....
.....
.....
.....
.
.
.
.....
....
.
.
.....
.
..
.....
X0
O0
X
Figura 1.11: Mudança de coordenadas.
−−→
Como OO0 = ae1 + be2 . Temos que
−−0→ −→ −−→0
O P = OP − OO = (x − a)e1 + (y − b)e2
e
−−→
x0 = hO0 P , f1 i = h(x − a)e1 + (y − b)e1 , (cos α)e1 + (sen α)e2 i
e portanto,
Isometrias no plano
24
x0 = (x − a) cos α + (y − b) sen α
Para f2 , existem duas possibilidades. Sabemos que α é o ângulo do vetor unitário e1
para o vetor f1 . Notemos que e1 ⊥ e2 e f1 ⊥ f2 , assim o ângulo que leva e2 em f2 pode ser
tanto o α como o 180◦ + α. No primeiro caso, obtemos o sistema O0 X 0 Y 0 de OXY fazendo
uma translação que leva O em O0 (e desloca OX e OY paralelamente) e depois fazemos uma
rotação de ângulo α.E dizemos que os sistemas O0 X 0 Y 0 e OXY possuem a mesma orientação.
Já no segundo transladamos O em O0 e em seguida fazemos a rotação de ângulo α e por
fim fazemos a reflexão em torno do eixo O0 X 0 . E portanto os sistemas OXY e O0 X 0 Y 0 têm
orientações opostas.
Se O0 X 0 Y 0 tem a mesma orientação que OXY então o vetor f2 é obtido de e2 por uma
rotação de ângulo α. Logo
f2 = −(sen α)e1 + (cos α)e2
E assim
−−→
y 0 = hO0 P , f2 i = h(x − a)e1 + (y − b)e2 , −(sen α)e1 + (cos α)e2 i = −(x − a) sen α + (y − b) cos α
Se o sistema O0 X 0 Y 0 tem orientação oposta à de OXY , então
f2 = (sen α)e1 − (cos α)e2
então
y 0 = (x − a) sen α − (y − b) cos α
Portanto, as fórmulas de mudança de coordenadas são
{ 0
x = (x − a) cos α + (y − b) sen α
y 0 = −(x − a) sen α + (y − b) cos α
ou
{ 0
x = (x − a) cos α + (y − b) sen α
y 0 = (x − a) sen α − (y − b) cos α
(1.1)
(1.2)
Podemos inverter as equações acima, obtendo (x, y) em função de (x0 , y 0 ). Multiplicando
a primeira equação em (1.1) por sen α e a segunda por cos α,
x0 sen α = (x − a)(sen α)(cos α) + (y − b) sen2 α
e
x0 cos α = −(x − a)(sen α)(cos α) + (y − b) cos2 α
ao somar as equações resultantes, obtemos
x0 sen α + y 0 cos α = y − b
Isometrias no plano
25
Então y = x0 sen α + y 0 cos α + b
Analogamente as outras equações, serão:
{
x = x0 cos α − y 0 sen α + a
y = x0 sen α + y 0 cos α + b
{
e
(1.3)
x = x0 cos α + y 0 sen α + a
y = x0 sen α − y 0 cos α + b
(1.4)
Com estas fórmulas podemos obter as coordenadas (x, y) do ponto P no sistema OXY
em função das coordenadas (x0 , y 0 ) do mesmo ponto no sistema O0 X 0 Y 0 . Em que a primeira
delas se aplica quando os dois sistemas são igualmente orientados e a segunda quando OXY
e O0 X 0 Y 0 têm orientações opostas (ou seja, além de translação e rotação, é preciso uma
reflexão para passar de um para o outro).
Como aplicação dessas observações podemos deduzir as equações de uma isometria T :
R → R2 . Como toda isometria é bijetiva e conserva a medida de ângulos, então T transforma
um sistema de coordenadas cartesianas OXY em um sistema de coordenadas cartesianas
O0 X 0 Y 0 .
2
P1 = T (P )
Y↑
y
·P
..
.....
..
.....
.
.....
·
.....
..... ..
.....
..
.....
..
.....
..
.....
..
.....
.
..
.....
.....
.....
.
.....
..
.....
.
..
.
.
.
.....
.....
.....
.....
.....
.
.
..
.....
.....
...
.
.
.
.
.
..... ..
.....
....
........
..
.....
.....
.....
.....
.....
.....
..
.....
....
.
.
.....
.
.
.
.
.
.....
.
.....
.....
.....
..... ........
.....
.....
.....
.....
.....
.
.
.
.....
.
.....
.....
....
.....
.....
.....
.....
.....
.....
.....
.
.
.
.
.....
....
.....
.....
.....
.....
.....
.....
.....
.....
.
.....
.
.
.
.....
...
.....
.....
.....
.....
.....
.....
.....
.....
..... ........
..... ....
..
.........
..... .........
.....
.....
.
.
.
.
.....
...
.
.
.
.....
.
.....
.....
..
.....
..
....
%X 0
Y0-
y
T
−→
O
x
→
X
x
O0
Figura 1.12: Ação de uma isometria num sistema de coordenadas.
Sejam (a, b) as coordenadas de O0 = T (O) no sistema OXY e α o ângulo de OX para
O0 X 0 . Usando as fórmulas (1.3) e (1.4) deduzidas acima, as coordenadas (x1 , y1 ) do ponto
P1 = T (P ) no sistema OXY são dadas por
{
x1 = x cos α − y sen α + a
(1.5)
y1 = x sen α + y cos α + b
ou
Isometrias no plano
26
{
x1 = x cos α + y sen α + a
y1 = x sen α − y cos α + b
(1.6)
T preserva a orientação no plano se OXY e O0 X 0 Y 0 forem igualmente orientados, e, nesse
caso, as equações de T são dadas por (1.5). Veremos abaixo que esse é o caso das translações
e das rotações. Por outro lado, se OXY e O0 X 0 Y 0 não forem igualmente orientados diz-se que
T inverte a orientação no plano, e, nesse caso, suas equações são dadas por (1.6). Veremos
abaixo que esse é o caso das reflexões.
Vemos que as equações de uma isometria T têm uma das formas
{
x1 = cx − dy + a
(1.7)
y1 = dx + cy + b com c2 + d2 = 1
ou
{
x1 = cx + dy + a
(1.8)
y1 = dx − cy + b com c2 + d2 = 1
Na primeira equação a matriz da parte linear de T é
)
(
c −d
d
c
e na segunda equação é
(
c
d
d −c
)
Na primeira equação , T preserva a orientação e o determinante é ∆ = c2 + d2 = 1 > 0.
Na segunda equação T inverte a orientação e o determinante é ∆ = −c2 − d2 = −1 < 0.
E assim, constamos que com o sinal do determinante ∆ vemos se a isometria preserva ou
inverte a orientação do plano.
1.8
Translações em coordenadas
Definição 1.8.1. Chama-se translação determinada pelo vetor v a transformação Tv :
R2 −→ R2 que leva cada ponto P de R2 no ponto Tv (P ) = P + v.
Dado um sistema de eixos ortogonais em que as coordenadas de v são (a, b), então, para
cada ponto P = (x, y), tem-se Tv (P ) = (x + a, y + b).
A imagem de toda a figura F pela translaç ão Tv é a figura cujos pontos P de F foram
transladados pelo mesmo vetor v. A imagem de uma reta r é a reta
Tv (r) = r + v = P {P + v; P ∈ r}
a qual é paralela a v.
Isometrias no plano
27
Além disso, Tv transforma um sistema de eixos ortogonais OX e OY em outro sistema
de eixos ortogonais O0 X 0 Y 0 cujos eixos são paralelos e têm o mesmo sentido que OX e OY .
Finalmente observamos que toda translação preserva orientação, pois suas equações correspondem às equações (1.7), em que se faz c = 1 e d = 0.
1.9
Rotações em coordenadas
Vejamos como ficam as equações de uma rotação.
Teorema 1.9.1. A rotação de centro C = (a, b) e ângulo α é dada por R : R2 → R2 ,
R(x, y) = ((x − a) cos α − (y − b) sen α + a, (x − a) sen α + (y − b) cos α + b).
Prova: Suponhamos primeiro que C = (0, 0). Observemos que o vetor unitário e1 = (1, 0)
é levado no vetor unitário f1 = (cos α)e1 + (sen α)e2 , e o vetor unitário e2 = (0, 1) é levado
no vetor unitário f2 = (− sen α)e1 + (cos α)e2 . Seja P = (x, y) um ponto qualquer do
−→
plano. Então OP = xe1 + ye2 . Seja P1 = R(P ). Ponhamos P1 = (x1 , y1 ) = x1 e1 + y1 e2 .
Considerando o sistema de coordenadas {f1 , f2 }, P1 tem nele as mesmas coordenadas que no
−−→
−−→
sistema {e1 , e2 }. Então OP1 = xf1 + yf2 . Logo x1 = hOP1 , e1 i = hxf1 + yf2 , e1 i = xhf1 , e1 i +
−−→
yhf2 , e1 i = x cos α − y sen α e y1 = hOP1 , e2 i = hxf1 + yf2 , e2 i = xhf1 , e2 i + yhf2 , e2 i =
x sen α + y cos α. Portanto, a rotação R com centro em O = (0, 0) e ângulo α tem expressão
R(x, y) = (x cos α − y sen α, x sen α + y cos α).
Consideremos agora uma rotação R de ângulo α em torno do ponto C = (a, b). Seja
T : R2 → R2 a translação T (x, y) = (x + a, y + b). De acordo com o esquema ilustrado na
Figura 1.13, T ◦ R ◦ T −1 é uma rotação de ângulo α em torno da origem. Assim T ◦ R ◦
T −1 (x, y) = T R(x − a, y − b) = T ((x − a) cos α − (y − b) sen α, (x − a) sen α + (y − b) cos α) =
((x−a) cos α−(y −b) sen α+a, (x−a) sen α+(y −b) cos α+b). Como querı́amos demonstrar.
y
R(P ) = T (R(T −1 (P ))
.......
................
.................
.......... .......
........................
.
.
.
.
.
.
.
.
.
.... .........
..........
.
.......... .............
..........
.
....... ..............................
.......
. ..........
.
.
.
.
.
.
.
.
.
.
.
.
..........
..
...
..........
.......
.......
..........
.......
.......
..........
.......
.......
..........
.......
.......
.........
.......
.......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
......
.....
.
.
.
.
.
.
.
.
.
.......
.
.
.
.
.
.
.......
..... .................
.
.
.
.
.
.
.
.
.
.
.
.
.....
....................
.
.
.
.
.
.
.
.
.
.
.
.
..
.... .....
.......
.................
.......
..................
.......
...................
........
..........
.......
.
.
..........
.
.
.
.
...
..........
.......
..........
..........
.......
.......
..........
.......
..........
.......................
Cα
R(T −1 (P )
O
P
x
T −1 (P )
Figura 1.13: Ilustração do Teorema 1.9.1.
Notemos que as equações da rotação de centro C = (a, b) e ângulo α correspondem às
equações (1.7), e, portanto, ela preserva orientação. De fato, temos
R(x, y) = ((x − a) cos α − (y − b) sen α + a, (x − a) sen α + (y − b) cos α + b)
Isometrias no plano
28
= (x cos α − y sen α − a cos α − b sen α + a, x sen α + y cos α − a sen α − b cos α + b)
1.10
Reflexões em coordenadas
Vejamos agora como ficam as equações de uma reflexão. Seguiremos de perto [4],pág. 150 e
seguintes.
Seja OXY um sistema de eixos ortogonais no plano e T a reflexão em torno da reta r,
que passa pela origem e faz um ângulo α com o eixo OX, transformando assim o eixo OX
em outro eixo que chamaremos de OX 0 e o eixo OY em outro eixo OY 0 . O ângulo de OY
para OY 0 é 180◦ + α.
Logo, se e1 , e2 , f1 e f2 são respectivamente os vetores unitários dos eixos OX, OY , OX 0
e OY 0 temos f1 = (cos 2α)e1 + (sen 2α)e2 e f2 = (sen 2α)e1 − (cos 2α)e2 .
Como a reflexão T é uma isometria então o ponto P = (x, y) é tranformado no ponto
P = (x1 , y1 ) tal que P1 = xf1 + yf2 . Segue-se mediatamente que
{
x1 = x cos 2α + y sen 2α
y1 = x sen 2α − y cos 2α
Estas são, portanto, as equações da reflexão em torno de uma reta que passa pela origem
e faz ângulo α com o eixo OX. Observemos que essas isometrias invertem a orientação, pois
suas equações correspondem às equações (1.8).
Agora estudaremos a reflexão em torno da reta y = ax + b com inclinação a = tg α que
corta o eixo OY em algum ponto b. Seja y = ax, a reta r0 , de equação y = ax, paralela a
r, que também passa pela origem e faz com o eixo OX o mesmo ângulo α. Para obter a
imagem do ponto P = (x, y) pela reflexão T em torno da reta r, primeiro daremos a P a
translação vertical de vetor −v = (0, −b), obtendo P 0 = (x, y − b). Em seguida, refletimos
P 0 em torno da reta r0 , obtendo o ponto P 00 = (x00 , y 00 ) com x00 = x cos 2α + (y − b) sen 2α e
y 00 = x sen 2α − (y − b) cos 2α.
E finalmente, dando a P 00 a translação vertical de vetor v = (0, b), chegamos a P1 =
T (P ) = (x1 , y1 ), com
{
x1 = x cos 2α + (y − b) sen 2α
(1.9)
y1 = x sen 2α − (y − b) cos 2α + b
ou
{
x1 = x cos 2α + y sen 2α − b sen 2α
(1.10)
y1 = x sen 2α − y cos 2α − b cos 2α + b
Observamos novamente que essas isometrias invertem a orientação, pois suas equações
correspondem às equações (1.8).
Se a reta r for vertical, ela tem expressão na forma x = c. Nesse caso as equações da
reflexão T (x, y) = (x1 , y1 ) em torno dessa reta são:
{
x1 = −x + 2c
(1.11)
y1 = y
Isometrias no plano
29
Observamos que essa isometria também inverte a orientação, pois suas equações correspondem às equações (1.8). Portanto toda reflexão inverte a orientação.
Podemos modificar as equações (1.9) com o intuito de exprimı́-las em função de a e b.
Como a = tg α, usando identidades conhecidas da trigonometria, temos
1 − a2
2a
e sen 2α =
2
1+a
1 + a2
Portanto as equações da reflexão em torno da reta y = ax + b são
1 − a2
2a
x1 =
x
+
(y − b)
1 + a2
1 + a2
2
2a
1−a
y1 =
x−
(y − b) + b
2
1+a
1 + a2
cos 2α =
1.11
Resultados finais
Do que foi provado nas seções 1.8, 1.9 e 1.10 temos
Teorema 1.11.1. As translações e as rotações são isometrias que preservam a orientação,
e as reflexões são isometrias que invertem a orientação.
Temos também
Teorema 1.11.2. Toda rotação diferente da identidade é a composta de duas reflexões.
Prova: Como toda rotação é uma isometria, então ela é a identidade, uma reflexão ou a
composta de duas ou três reflexões (Teorema 1.4.8, pág. 20). Pelo Teorema anterior, vimos
que a toda rotação é uma mudança de coordenadas que conserva orientação. Mas toda
reflexão inverte a orientação. Logo uma rotação diferente da identidade é a composta de
duas reflexões.
Chamamos de reflexão com deslizamento à composição de uma reflexão em torno da reta
r com uma translação com vetor de deslocamento v 6= 0 paralelo à reta r. Um resultado útil
é
Teorema 1.11.3. As isometrias do plano são: a identidade, as translações, as rotações, as
reflexões e as reflexões com deslizamento.
Prova: Acompanhamos a demonstração de [5], págs. 25 a 29. Seja T : R2 → R2 uma
isometria diferente da identidade e seja A ∈ R2 tal que A0 = T (A) 6= A. Seja A00 = T (A0 ).
Então d(A0 , A00 ) = d(A, A0 ) > 0.
Temos três casos relativos ao posicionamento dos pontos A, A0 e A00 .
PRIMEIRO CASO: A, A0 e A00 são não-colineares.
Isometrias no plano
30
.........
....... ....
....... .......
....
.
.
.
..
.......
.....
.......
..
......
.....
.......
.
.
.
....
.
.
.
..
.......
..
.......
.....
.......
.
.........................................................................................................
.
.
.
.
... ..
.......
....
.........
.....
.....
.......
.........
..
.....
........................
.....
.....
.....
........ .......
.
.
.
..
.
.
.
.
.
.
.
.
.
.......
......
...
.
.
.
.....
.
.
.
.
.
.
.
.
.
.
......
..
......
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.....
......
...
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
... .
......
...
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
. ...
... ...............
.
.
.... .....
.
.
....... ....
................
.
.
.
.
.. ...
..........
...........
A0
A
B2
A00
B1
Figura 1.14: Existem duas posições possı́veis: B1 e B2 .
A imagem do triângulo AA0 A00 pelo isometria T é um triângulo que tem A0 e A00 como
vértices. Como os lados desse triângulo têm medidas iguais às dos lados de AA0 A00 , existem
duas posições possı́veis, B1 e B2 , para o seu terceiro vértice, conforme ele e o ponto A estejam
ou não do mesmo lado da reta A0 A00 .
...
..
..
...
..
..
..
....
....
...
.....
..
..
.....
..............................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.....
..
...
..
.....
.....
...
.....
.....
.
.....
.....
..... .......
.. ........
.....
..
...
.......
.
.
.
.
.
.
.
.
.
... .......
.... ...
.....
.....
.....
..
.....
.....
...
..
....
.....
.....
.
.....
.....
...
.....
.
.
.
.
.....
.
.
.
.
.
.
..
...
.....
.
.
.
.
.
.
.
.
.
.
.....
.....
.
...
....
.
.
.
.....
.
.
..
.....
.....
.
.
.
.
.
.....
..
...
.
.
.....
.
.
.
.
.
..
..
..
.
.
..... . .....
..
..
............
...
A0
A00
B1
A
O
Figura 1.15: Tomando a posição B1 .
Na primeira hipótese, o ponto B1 = T (A00 ) forma com A, A0 e A00 a poligonal conb0 e A
c00 são iguais,
vexa AA0 A00 B1 , na qual os lados têm a mesma medida e os ângulos A
logo ela pode ser inscrita numa circunferência de raio OA, cujo centro O é o ponto de encontro das mediatrizes dos segmentos AA0 , A0 A00 é A00 B1 . Seja O0 = T (O). Então, como
d(O, A) = d(O, A0 ) = d(O, A00 ), temos d(O0 , A0 ) = d(O0 , A00 ) = d(O0 , B1 ), logo O0 pertence
às mediatrizes dos segmentos A0 A00 e A00 B1 , donde O0 = O. Assim, se considerarmos a
b 0 , teremos ρ(A) = A0 = T (A), ρ(A0 ) = A00 = T (A0 )
rotação ρ de centro O e ângulo AOA
e ρ(A00 ) = B1 = T (A00 ). Segue-se então de 1.3.17 que T = ρ é uma rotação. Na segunda
hipótese temos um paralelogramo no qual AA0 e A00 B2 são lados opostos e A0 A00 é uma
diagonal.
Segue-se que os pontos médios M , P e N desses três segmentos estão sobre uma reta r.
Se considerarmos a isometria S = TM N ◦ Rr , composta de translação TM N com reflexão em
torno de r, vermos que S e T coincidem nos pontos não-colineares A, A0 e A00 , logo T = S,
em virtude de 1.3.17. Concluı́mos então que T é uma reflexão com deslizamento.
Isometrias no plano
31
B2
.
...
.........
.....
.........
.....
.........
.....
.........
.....
.........
.
.
.
.
.
.
.
.
.
.
.
.
....
.........
..... ..........
...............
...........
................
.
.
.
.
.
.
.
.
... .
......... .....
......... ........
.........
.....
.........
.................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
....
.........
.....
.........
.....
.........
.....
.........
..... ..................
.
.
.
.
..... ..........
..............
...........
..............
......... ........
.
.
.
.
.
.
.
.
.
...
.....
.........
.........
.....
.........
.....
.........
.....
.........
.
.
.
.
.
.
.
.
......
.........
.........
A0
•
N
•
P
A00
•
M
r
A
Figura 1.16: Tomando a posição B2 .
SEGUNDO CASO: A, A0 e A00 são pontos distintos e colineares. Como d(A, A0 ) =
d(A0 , A00 ), vemos que A0 é o ponto médio do segmento AA00 . A reta r, que contém os três
pontos dados, é transformada em si mesma pela isometria T . Além disso T coincide, nos
pontos A e A0 com a translação TAA0 . Segue-se de 1.3.15 que, em todos os pontos de r, T
coincide com esta translação. Consideremos um ponto B fora da reta r.
B1
B..
..
..
.............
.............
... .......
... .......
... .. .........
... .. .........
.....
.. ...
.. ...
.....
.
.
.....
.
.....
... ..
.....
.....
... ...
...
...
.....
.....
..
...
..
.....
.....
.
..
.
.
.....
.....
.
.
...
.
..
.
.....
.
.
.
.....
...
.
..
.....
.
..
.
.
.
.
.....
.....
.
.
.
.
.
.
.
.
.....
...
...
..... ..
..
.
.
.
.
.
.
.
.
.
...............................................................................................................................................................................................................................................
...
.....
....
...
.....
.
.
...
.
.
....
...
.
.....
...
....
.....
...
.....
...
.....
.
.
... ...
.
.
.
... .
.....
...
.....
... ... ........
... .. ......
... .....
....
r A
A0
A00
B2
Figura 1.17: Segundo Caso.
O triângulo AA0 B é transformado pela isometria T noutro triângulo que tem A0 e A00
como vértices e lados com as mesmas medidas que os de AA0 B. Existem duas posições
possı́veis, B1 e B2 , para o terceiro vértice desse triângulo, conforme ele e B estejam do
mesmo lado ou em lados opostos da reta r. Na primeira hipótese, AB e A0 B1 são lados
opostos de um paralelogramo logo, considerando a translação TAA0 : R2 → R2 , vemos que
ela coincide com a isometria T nos pontos não-colineares A, A0 e B. Segue-se de 1.3.17 que
T = TAA0 , logo T é uma translação. Na segunda hipótese, como o ponto B2 é o simétrico de
B1 em relação a reta r, considerando a reflexão com deslizamento S = TAA0 ◦ Rr : R2 → R2 ,
vemos que S(A) = T (A) = A, S(A0 ) = T (A0 ) = A00 e S(B) = T (B) = B2 , logo S = T , em
virtude de 1.3.17. Assim T é uma reflexão com deslizamento.
TERCEIRO CASO: A00 = A. Neste caso, a isometria T transforma o segmento de
reta AA0 em si mesmo, logo T (M ) = M se M é o ponto médio AA0 . A mediatriz s desse
Isometrias no plano
32
segmento é então transformada em si mesmo por T .
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
.
..............................................................................................................................................................................
....
...
...
...
...
.
.....
...
...
...
...
...
...
...
...
...
...
...
s
•
•
A0
M
• •
A
r
•B 0
Figura 1.18: Terceiro Caso.
Seja B um ponto dessa mediatriz, diferente de M . Há duas possibilidades: ou T (B) = B
ou T (B) = B 0 , ponto simétrico de B relativamente a reta r = AA0 . Na primeira hipótese,
T coincide com a reflexão Rs : R2 → R2 nos pontos A, A0 e B, logo T = Rs . Na segunda
hipótese, T coincide com a rotação ρ : R2 → R2 em torno do ponto M , com ângulo de 180◦ ,
nos pontos não-colineares, A, B e M , logo T = ρ. Portanto, neste terceiro caso, T é uma
translação ou uma rotação de 180◦ (simetria em torno de um ponto).
Para uso posterior observamos que desse resultado segue o
Teorema 1.11.4. As isometrias do plano que têm pelo menos um ponto fixo são: a identidade, as rotações com centro nesse ponto fixo e as reflexões em torno de uma reta que
contém esse ponto fixo.
Utilizaremos um tipo de transformação do plano chamada homotetia, com a seguinte
Definição 1.11.5. A transformação T : R 7→ R definida por T (x, y) = (kx, ky) para algum
número real positivo k, chama-se homotetia de razão k e centro O.
A inversa da homotetia T (x, y) = (kx, ky) é a homotetia S(x, y) = (x/k, y/k). Toda
homotetia leva segmento sobre um segmento cujo comprimento é k vezes o comprimento do
primeiro segmento. Ainda, leva ângulo sobre ângulo, preservando sua medida. Portanto,
leva polı́gonos regulares em polı́gonos regulares com razão de semelhança k. Ainda, expande
ou encolhe figuras do plano. Por exemplo, T (x, y) = (kx, ky) leva a circunferência de centro
em O e raio r sobre a circunferência de centro em O e raio kr.
Capı́tulo 2
Grupos de simetria de polı́gonos
regulares
2.1
Introdução
Até o momento fizemos o estudo das isometrias com o objetivo de estudar o grupo de
isometrias dos polı́gonos regulares, que é o que faremos nesse capı́tulo. Começaremos com
algumas definições e resultados acerca de polı́gonos regulares, depois estudaremos os grupos
de isometrias do triângulo e do quadrado e no final generalizaremos os resultados obtidos
para polı́gonos regulares de n lados.
2.2
Definições e resultados iniciais
Vejamos inicialmente algumas definições.
Definição 2.2.1. Consideremos uma sequência de n pontos A1 , A2 , ..., An de um plano,
com n≥3, sendo que quaisquer três pontos consecutivos não são colineares. Consideramos
consecutivos também os pontos An−1 , An e A1 , assim como An , A1 e A2 . Chama-se polı́gono
A1 A2 A3 . . .An−1 An à reunião dos segmentos A1 A2 , A2 A3 , ..., An−1 An e An A1 se esses segmentos se interceptam apenas em suas extremidades.
Considerando o polı́gono A1 A2 A3 . . .An−1 An , usaremos a seguinte nomenclatura:
i) os pontos A1 , A2 , A3 , . . ., An−1 , An são denominados vértices do polı́gono;
ii) os segmentos A1 A2 , A2 A3 , . . ., An−1 An , An A1 , são chamados lados do poligono;
iii) ∠A1 = ∠An A1 A2 , ∠A2 = ∠A1 A2 A3 , . . ., ∠An = ∠An−1 An A1 são os ângulos do
polı́gono;
iv) Dois lados que têm um vértice em comum são lados consecutivos;
33
Isometrias no plano
34
v) Dois ângulos de um polı́gono são consecutivos se têm em comum um lado do polı́gono.
Definição 2.2.2. Um polı́gono é chamado convexo quando nenhum par de seus pontos está
em semiplanos opostos relativamente a cada reta que contém um de seus lados.
Definição 2.2.3. Um polı́gono é regular se é convexo e todos os lados e ângulos são congruentes.
Um resultado básico sobre polı́gonos regulares que nos interessa aqui está demonstrado
no livro [2]. É o seguinte:
Teorema 2.2.4. Todo polı́gono regular é inscritı́vel em uma circunferência, e circunscritı́vel
em uma circunferência. Os centros dessas circunferências são os mesmos.
Definição 2.2.5. O centro comum das circunferências inscrita e circunscrita a um polı́gono
regular chama-se centro do polı́gono regular.
Sem perda de generalidade, consideremos polı́gonos regulares com centro na origem
das coordenadas de um sistema cartesiano Oxy, e com vértices na circunferência C =
{(x, y)|x2 + y 2 = 1}. Quando (for conveniente, os vértices de
) um polı́gono regular de n la2(j − 1)π
2(j − 1)π
dos serão indicados por Vj = cos
, sen
, 1 ≤ j ≤ n. Nestas condições
n
n
diremos que o polı́gono está em “posição canônica”.
Observemos que os vértices Vj podem ser expressos como raı́zes complexas da unidade.
2πi
Assim, dado n, seja w = e n = cos 2π
+ isen 2π
. Então, identificando os pontos do plano
n
n
com os números complexos, vem Vj = ω j−1 . Além disso, como ω n = 1, temos
j
Σnj=1 Vj = Σn−1
j=0 ω =
ωn − 1
=0
ω−1
Logo a origem O das coordenadas é o baricentro do conjunto {V1 , V2 , ..., Vn }, isto é, n1 Σnj=1 Vj =
0.
Vejamos agora alguns resultados gerais a respeito da ação de uma isometria sobre polı́gonos
regulares.
Teorema 2.2.6. Se T : R2 → R2 é uma isometria e P é um polı́gono, então T (P) é um
polı́gono.
Prova: Sejam T uma isometria e P = A1 A2 ...An um polı́gono. Como os pontos A1 , A2 , ...,
An são diferentes dois a dois, os pontos T (A1 ), T (A2 ), ..., T (An ) também são diferentes dois
a dois, pois T é injetiva. Como três pontos consecutivos quaisquer da sequência A1 , A2 , ...,
An , A1 , A2 , são não colineares, o mesmo ocorre com a sequência T (A1 ), T (A2 ), ..., T (An ),
T (A1 ), T (A2 ), como foi observado logo após a Proposição 1.3.5.
Afirmamos que os segmentos T (A1 )T (A2 ), T (A2 )T (A3 ),... , T (An )T (A1 ) se interceptam
apenas em suas extremidades. De fato, suponhamos, por exemplo, que Q ∈ T (Aj )T (Aj+1 ) ∩
Isometrias no plano
35
T (Ak )T (Ak+1 ), com Q no interior dos segmentos. Seja P = T −1 (Q). Então P ∈ Aj Aj+1 ∩
Ak Ak+1 , com P no interior dos segmentos, o que não pode ocorrer.
Temos assim todas as condições da Definição 2.2.1 para concluir que T (A1 )T (A2 )...T (An )
é um polı́gono. Terminamos observando que T (P) = T (A1 )T (A2 )...T (An ).
Escólio 2.2.7. Sejam T : R2 → R2 uma isometria e P um polı́gono regular tal que T (P) = P.
Então T leva vértice de P em vértice de P . Em particular, T é uma bijeção do conjunto dos
vértices de P nele mesmo.
Teorema 2.2.8. Se T : R2 → R2 é uma isometria e P é um polı́gono regular, então T (P) é
um polı́gono regular.
Prova: Sejam T uma isometria e A1 A2 ...An um polı́gono. Como foi demonstrado no Teorema 2.2.6, T (A1 )T (A2 )...T (An ) é um polı́gono. Como A1 A2 = T (A1 )T (A2 ), A2 A3 =
T (A2 )T (A3 ),... , An A1 = T (An )T (A1 ), vemos que os lados do polı́gono T (A1 )T (A2 )...T (An )
são congruentes. Ainda, pela Proposição 1.3.9, T preserva ângulos, logo T (A1 )T (A2 )...T (An )
tem ângulos congruentes. Portanto é regular.
De agora em diante nos interessamos pelas isometrias que aplicam um polı́gono regular
nele mesmo. Essas isometrias têm um nome especial, conforme a
Definição 2.2.9. Dado um polı́gono regular P, toda isometria T : R2 → R2 tal que T (P) = P
chama-se simetria de P.
Um resultado imediato é o seguinte:
Teorema 2.2.10. O conjunto das simetrias de um polı́gono regular P é um grupo algébrico
sob a operação de composição.
Prova: Observemos primeiro que a composição de duas simetrias de P ainda é uma simetria
de P. De fato, se T e S são isometrias tais que T (P) = P e S(P) = P, então T ◦ S é uma
isometria (Proposição 1.3.12) e T ◦ S(P) = T (S(P)) = T (P) = P. Logo T ◦ S é uma simetria
de P.
Seja G o conjunto das simetrias de P. Vimos que G é fechado em relação à composição.
Como a composição é associativa, a estrutura (G, ◦) é associativa. Ainda Id ∈ G, portanto
(G, ◦) tem elemento neutro. Por outro lado, se T ∈ G, sabemos que T −1 é uma isometria
(Proposição 1.3.11) e T −1 (P) = T −1 (T (P)) = Id(P) = P. Logo T −1 ∈ G. Assim (G, ◦) é um
grupo.
Devido a esse resultado usaremos a
Definição 2.2.11. O conjunto das simetrias de um polı́gono regular P é chamado grupo de
simetrias de P.
Precisaremos do resultado do Teorema abaixo. Para demonstrá-lo usaremos o
Isometrias no plano
36
Lema 2.2.12. Seja T : R2 → R2 uma isometria e V = {v1 , v2 , ..., vn } um conjunto finito de
1
pontos do R2 . Seja G = (v1 + v2 + ... + vn ) o baricentro de V. Então T (G) é o baricentro
n
do conjunto T (V) = {T (v1 ), T (v2 ), ..., T (vn )}.
Prova: Suponhamos primeiro que T é a translação definida por T (X) = X + k. Então
T (G) = G + k =
v1 + v2 + ... + vn + nk
1
(v1 + v2 + ... + vn ) + k =
=
n
n
(v1 + k) + (v2 + k) + ... + (vn + k)
1
= [T (v1 ) + T (v2 ) + ... + T (vn )]
n
n
de T (V). Suponha agora que T é linear. Então T (G) =
(Logo T (G) é o baricentro
)
1
1
T
(v1 + v2 + ... + vn ) = [T (v1 ) + T (v2 ) + ... + T (vn )]. Logo novamente T (G) é o
n
n
baricentro de T (V). Notemos agora que toda a isometria é a composta de uma aplicação
linear e uma translação, conforme nos mostram as equações 1.7 e 1.8.
=
Teorema 2.2.13. Seja P um polı́gono regular em posição canônica. Se T : R2 → R2 é uma
simetria de P, então a origem O é um ponto fixo de T .
Prova: Seja P um polı́gono regular em posição canônica, e seja V o conjunto de seus vértices.
Sabemos que o baricentro de V é O, e, pelo Lema acima, o baricentro de T (V) é T (O). Se
T : R2 → R2 é uma simetria de P, então T (V) = V. Como os baricentros de V e T (V) são os
mesmos, temos que o baricentro de T (V) é O. Portanto T (O) = O.
2.3
O grupo de simetrias do triângulo equilátero
Vamos mostrar nessa seção que o grupo das simetrias de um triângulo equilátero tem seis
elementos. Apresentamos a tábua desse grupo e suas propriedades.
Teorema 2.3.1. Dado um triângulo equilátero ABC, existem exatamente seis isometrias
T : R2 → R2 tais que T (ABC) = ABC.
Prova: Seja ABC um triângulo equilátero e MAC , MBC e MAB o pontos médios dos lados
AC, BC e AB, respectivamente. Seja T : R2 → R2 uma isometria tal que T (ABC) = ABC.
Como T leva pontos não colineares em pontos não colineares (observação feita logo após a
1.3.5), então T (A)T (B)T (C) é um triângulo e, por hipótese, esse triângulo é ABC. Sabemos,
pelos Teoremas 1.3.4 e 1.3.10, que T : {A, B, C} → {A, B, C} é uma bijeção nesse conjunto.
Mas existem seis dessas bijeções. Portanto, toda isometria que leva ABC em ABC coincide
no conjunto {A, B, C}, com uma dessas bijeções. Abaixo veremos que existe uma isometria
correspondente a cada uma dessas bijeções, e, pelo Teorema 1.3.17, ela é única. Portanto,
as isometrias listadas abaixo constituem todas as isometrias que levam ABC em ABC.
Isometrias no plano
37
...
..
...
...
...
...
...
...
...
...
.
............
.
... .............
...
...
... .... ...........
...
........
... ....
........ .....
...
...
.
.
.
.
.
.
........
...
...
. ..
...
.
... ...............
...
....
........
...
...
........
...
... .....
........
... ...
...
..
.....................................................................................................................................................................................
...
.
.
...
.
.......
.. .....
.
.
.
.
.
.
....
.
.
...
....
..
.
.
.
.
.
.
.
.
.
...
...
.
...
... ..............
...
...
......
...
...
....... .....
... .....
........
...
... ... ..............
.
...
... .... ..........
...
.............
...
...
...
...
...
.
...
.
...
...
.
...
...
B
r3
r1
A
C
r2
Figura 2.1: Ilustração do Teorema 2.3.1.
Rotação de 360◦ ; a denotaremos por Id
A→A
B→B
C→C
←−−→
Reflexão em torno da reta r1 = AMBC ; a denotaremos por R1
A→A
B→C
C→B
←−−→
Reflexão em torno da reta r2 = BMAC ; a denotaremos por R2
A→C
B→B
C→A
←−−→
Reflexão em torno da reta r3 = CMAB ; a denotaremos por R3
A→B
B→A
C→C
Rotação de 120◦ , com centro no baricentro do triângulo; a denotaremos por R 2π
3
A→B
B→C
C→A
Rotação de 240◦ , com centro no baricentro do triângulo; a denotaremos por R 4π
3
A→C
B→A
C→B
Essas isometrias formam um estrutura de grupo com a operação de composição,como
demonstrado no Teorema 2.2.10, isto é, o conjunto S4 = {Id, R 2π , R 4π , R1 , R2 , R3 } possui a
3
3
propriedade de associatividade, elemento neutro e inverso.
Apresentamos agora a tábua do grupo de simetria do triângulo equilátero em relação à
operação de composição.
Isometrias no plano
38
◦
Id
R 2π
3
R 4π
3
R1
R2
R3
Id
Id
R 2π
3
R 4π
3
R1
R2
R3
R 2π
3
R 2π
3
R 4π
3
id
R2
R3
R1
R 4π
3
R 4π
3
id
R 2π
3
R3
R1
R2
R1
R1
R3
R2
id
R 4π
3
R 2π
R2
R2
R1
R3
R 2π
3
Id
R 4π
3
3
R3
R3
R2
R1
R 4π
3
R 2π
3
id
As Figuras 2.2, 2.3 e 2.4 mostram algumas das composições da táboa.
...
...
...
...
...
3
...
...
...
......
.
.
.
.
.
...
........................
...
.
.... ..... ..............
.
........ ....
... ....
.........
...
...
.. ......
...
...
... ..............
...
........
... .....
...
........
... ...
1
...
..
..................................................................................................................................................................
. ...
...
.
.....
.
.......
.. ....
.
.
.
.
.
.
....
.
.
...
....
.
..
.
.
.
.
.
.
...
.
.
... .......
..
..
...
...
.........
... .....
........ .....
... ... ..............
...
...
.................
...
........
...
...
.
...
.
..
...
.
.
...
..
2
.
.
.
.
r
B
3
−→
−→
r
r
C
B
r
...
...
...
...
...
3
...
...
...
......
.
.
.
.
.
...
........................
...
.
.... ..... ..............
.
........ ....
... ....
.........
...
...
.. ......
...
...
... ..............
...
........
... .....
...
........
... ...
1
...
..
...................................................................................................................................................................
. ...
...
.
.....
.
.......
.. ....
.
.
.
.
.
.
....
.
.
...
....
.
..
.
.
.
.
.
.
...
.
.
... .......
..
..
...
...
.........
... .....
........ .....
... ... ..............
...
...
.................
...
........
...
....
.
...
.
..
...
.
.
...
..
2
.
.
.
.
B
R 4π
3
r
A
C
r
A
R 2π
r
...
...
...
...
...
3
...
...
...
......
.
.
.
.
.
.
...
........................
...
.
.... ..... ..............
.
........ ....
... ....
.........
...
...
...
... ..............
...
........
...
...
...
........
... .....
........
1
... ..
...
..................................................................................................................................................................
. ...
...
.
.....
.
.......
.. ....
.
.
.
.
.
.
....
.
.
...
....
...
...
... ..............
...
.
.
.
...
.
.
.
.
..... ..
... .....
........ .....
... ... ..............
...
...
.................
...
.........
...
..
.
...
.
..
...
.
.
...
..
2
.
.
.
.
A
C
r
r
Figura 2.2: R 4π ◦ R 2π : composta de R 2π com R 2π que é igual a identidade.
3
3
3
...
...
...
...
...
3
...
...
...
......
.
.
.
..
...
........................
...
.
.
.... ..... ..............
........ .....
... ....
........
...
...
...
..........
...
...
... ...............
... .....
...
........
........
... ..
1
...
...................................................................................................................................................................
.
...
.
....
.
.
.. ....
.......
.
.
.
.
.
.
.
....
.
...
..
...
... ..............
...
...
.
.
.
.
.
.
.
.
.
...
.
........
... .....
....... .....
... .... ..............
...
...
................
...
...........
...
.
.
...
.
..
...
.
.
...
..
2
.
.
..
.
B
r
r
A
C
r
...
...
...
...
...
3
...
...
...
......
.
.
.
..
...
........................
...
.
.
.... ..... ..............
........ .....
... ....
........
...
...
...
..........
...
...
... ...............
... .....
...
........
........
... ..
1
...
...................................................................................................................................................................
.
...
.
....
.
.
.. ....
.......
.
.
.
.
.
.
.
....
.
...
..
...
... ..............
...
...
.
.
.
.
.
.
.
.
.
...
.
........
... .....
....... .....
... .... ..............
...
...
... .............
...
............
...
.
.
...
.
..
...
.
.
...
..
2
.
.
..
.
B
R2
−→
3
r
C
A
r
r
A
R1
−→
r
...
...
...
...
...
3
...
...
...
......
.
.
.
..
...
........................
...
.
.
.... ..... ..............
........ .....
... ....
........
...
...
...
..........
...
...
... ...............
... .....
...
........
........
... ..
1
...
...................................................................................................................................................................
.
...
.
....
.
.
.. ....
.......
.
.
.
.
.
.
.
....
.
...
..
...
... ..............
...
...
.
.
.
.
.
.
.
.
.
...
.
........
... .....
....... .....
... .... ..............
...
...
................
...
...........
...
.
.
...
.
..
...
.
.
...
..
2
.
.
..
.
r
C
B
r
Figura 2.3: R2 ◦ R1 : composta de R2 com R1 que é igual a R 2π .
3
Existe outra forma de representar esse grupo, que permite constatar mais facilmente
isomorfismos com outros grupos e observar generalizações. Pondo a = R 2π e b = R1 e
3
indicando por e a identidade, vemos que a2 = R 4π , a3 = e, ba = R2 = a2 b, ab = R3 e
3
b2 = id = e. Portanto o grupo das simetrias do triângulo equilátero pode ser representado
por
S4 = {e, a, a2 , b, ab, a2 b}
Isometrias no plano
39
...
...
...
...
...
3
...
...
...
......
.
.
..
...
.........................
...
.
... ... ..........
.
..
........
... ....
............
...
...
...
...
... ..............
...
...
........
...
...
...
.
.
........
... ....
........
1
...
.
.....................................................................................................................................................................
.
.
...
..
.
.
.......
.. ....
.
.
.
.
.
.
....
.
.
...
...
...
...
... ..............
...
.
.
.
.
.
.
...
.
.
.
.
......
... .....
....... .....
... ... ..............
...
...
... .... ..........
...
..............
...
.
.
...
.
..
...
.
.
...
..
2
.
.
..
..
B
r
3
−→
A
C
r
C
R 4π
r
...
...
...
...
...
3
...
...
...
......
.
.
..
...
.........................
...
.
... ... ..........
.
..
........
... ....
............
...
...
...
...
... ..............
...
...
........
...
...
...
.
.
........
... ....
........
1
...
.
.....................................................................................................................................................................
.
.
...
..
.
.
.......
.. ....
.
.
.
.
.
.
....
.
.
...
...
...
...
... ..............
...
.
.
.
.
.
.
...
.
.
.
.
.
......
... .....
....... .....
... ... ..............
...
...
... .... ..........
...
..............
...
.
.
...
.
..
...
.
.
...
..
2
.
.
..
..
r
r
B
A
r
A
R1
−→
r
...
...
...
...
...
3
...
...
...
......
.
.
..
...
.........................
...
.
... ... ..........
.
..
........
... ....
............
...
...
...
...
... ..............
...
...
........
...
...
...
.
.
........
... ....
........
1
...
.
.....................................................................................................................................................................
.
.
...
..
.
.
.......
.. ....
.
.
.
.
.
.
....
.
.
...
...
...
...
... ..............
...
.
.
.
.
.
.
...
.
.
.
.
.
......
... .....
....... .....
... ... ..............
...
...
... .... ..........
...
..............
...
.
.
...
.
..
...
.
.
...
..
2
.
.
..
..
B
C
r
r
Figura 2.4: R 4π ◦ R1 : composta de R 4π com R1 que é igual a R3 .
3
3
e é caracterizado, como grupo de 6 elementos, gerado por duas letras, pelas condições:
|S4 | = 6,
S4 =< a, b >,
a3 = e,
b2 = e,
ba = a2 b
Observamos que S4 é isomorfo ao grupo simétrico S3 , e veremos que ele é mais comumente
indicado por D3 , o grupo diedral de ordem 6.
Nessa notação temos a seguinte tábua:
◦
e
a
a2
b
ab
a2 b
e
e
a
a2
b
ab
a2 b
a
a
a2
e
a2 b
b
ab
a2
a2
e
a
ab
a2 b
b
b
b
ab
a2 b
e
a
a2
ab
ab
a2 b
b
a2
e
a
a2 b
a2 b
b
ab
a
a2
e
Notemos que S4 não é abeliano (por exemplo, R1 ◦ R2 6= R2 ◦ R1 ). Seu centro é Z(S4 ) =
0
{e} e seu grupo de comutadores é S4
= {e, a, a2 }.
2.4
O grupo de simetrias do quadrado
Vamos mostrar nessa seção que o grupo das simetrias de um quadrado tem oito elementos.
Apresentamos a tábua desse grupo e suas propriedades.
Na demonstração do Teorema abaixo precisaremos do seguinte
Lema 2.4.1. Considere um quadrado ABCD em posição canônica, e seja T : R2 → R2 uma
reflexão que leva esse quadrado nele mesmo. Então o eixo de simetria de T é uma das retas
Ox, Oy, x = y ou x = −y.
Prova: Vimos no Teorema 2.2.13 que toda isometria do quadrado ABCD fixa a origem
das coordenadas. Portanto o eixo de simetria de qualquer reflexão que preserva o quadrado
contém a origem. Suponhamos que T seja uma reflexão em torno de uma reta s que não
é Ox, Oy, x = y e x = −y. Como s contém a origem, ela intercepta o quadrado em dois
Isometrias no plano
40
pontos. Seja P um deles. Consideremos a reta t perpendicular a s por P . Como P não é um
vértice do quadrado, t intercepta o quadrado em exatamente dois pontos, sendo um deles
P , e o outro, digamos, Q. Mas T (Q) deveria pertencer ao quadrado e a t, o que não ocorre.
Isto termina a demonstração.
Teorema 2.4.2. Existem oito isometrias que levam um quadrado nele mesmo.
Prova: Considere um quadrado ABCD em posição canônica. Vimos que toda isometria
do quadrado fixa a origem das coordenadas. Assim, se ela não for a identidade, ela é uma
rotação com centro na origem ou uma reflexão com eixo de simetria passando pela origem.
Pelo 2.4.1, se for uma reflexão, o eixo só pode ser: Ox, Oy, x = y ou x = −y.
Lembremos também que toda simetria do quadrado induz uma bijeção no conjunto
{A, B, C, D} de seus vértices. Existem 24 bijeções. Afirmamos que apenas oito delas se
realizam como simetrias do quadrado. Vamos começar listando essas oito simetrias. Depois
mostraremos que não existem outras. Usaremos as notações da Figura 2.5, em que d1 é o
eixo Ox, d2 é o eixo Oy, h é a diagonal secundária e v é a diagonal principal.
d....2
...
...
...
...
.
.....
..............
.
.....
.
.....
.
.
.....
... ... .......
.....
.
.
.
.
.....
.....
... ... .......
.
.
.....
.
.....
.
.....
..
...
....
.
.....
.
.
.
.
.
.
.
.
.
.
..... .....
...
..... ......
.......
.....
..
...
.........
.........
..... .........
..... .........
....
.....
.....
.....
.....
.
.
.
.
.
.
.
.
.
.....
..... .. .....
....
.....
..... ... ....
.....
.....
.... .. .....
.....
............................................................................................................................................................................................
.....
.
.
.
.
.
...
.
.
.
.
.
.
.
.....
.....
... .... .......
.
.
.
.
.....
.
.
.
.
.
.....
.
...
.....
.....
.....
....
.....
.....
..... ........
..... .........
.
..........
.
.........
....
....
..
...
..... ......
..... .....
..... ........
..... .........
.....
..... .... .........
.....
.
.
.
.
.....
..... .. .....
..
.....
..... ... .....
.....
.....
............
.....
..
....
....
...
...
...
...
...
.
B
v
A d1
C
D
h
Figura 2.5: Ilustração do Teorema 2.4.2.
a) Identidade, que denotaremos por Id
A→A
B→B
C→C
D→D
b) Reflexão em torno da reta d1 , que denotaremos por R1
A→A
B→D
C→C
D→B
c) Reflexão em torno da reta d2 , que denotaremos por R2
A→C
B→B
C→A
D→D
d) Reflexão em torno da reta h, que denotaremos por Rh
A→D
B→C
C→B
D→A
Isometrias no plano
41
e) Reflexão em torno da reta v, que denotaremos por Rv
A→B
B→A
C→D
D→C
f ) Rotação de π2 , cujo centro é o ponto O, que denotaremos por R π2 .
A→B
B→C
C→D
D→A
g) Rotação de π, cujo centro é o ponto O, e que denotaremos por Rπ .
A→C
B→D
C→A
D→B
h) Rotação de 3π
, cujo centro é o ponto O, e que denotaremos por R 3π .
2
2
A→D
B→A
C→B
D→C
Vemos que essas oito bijeções do conjunto {A, B, C, D} são de fato correspondentes a
simetrias do quadrado, e são as únicas simetrias que agem nesse conjunto dessa forma,
devido ao Teorema 1.3.17. Vamos mostrar que as outras bijeções do conjunto {A, B, C, D}
não correspondem a simetrias do quadrado. Para isso vamos dividir essas bijeções um grupos.
Primeiro caso: Se T é uma simetria do quadrado que fixa um dos vértices, então tem
que fixar o vértice oposto. Isso não acontece nos casos abaixo.
i) A → A
B→C
C→D
D→B
j) A → A
B→D
C→B
D→C
k) A → B
B→C
C→A
D→D
l) A → B
B→D
C→C
D→A
m) A → C
B→A
C→B
D→D
n) A → C
B→B
C→D
D→A
o) A → D
B→A
C→C
D→B
p) A → D
B→B
C→A
D→C
Segundo caso: Se T é uma simetria do quadrado que fixa dois vértices não colineares
com a origem, então, pelo Teorema 1.3.16, T teria que ser a identidade. Portanto os casos
abaixo não correspondem a simetrias do quadrado.
q) A → A
B→B
C→D
D→C
Isometrias no plano
42
r) A → A
B→C
C→B
D→D
s) A → B
B→A
C→C
D→D
t) A → D
B→B
C→C
D→A
Terceiro caso: Agora analisaremos cada uma das bijeções
u) A → B
B→D
C→A
D→C
Se fosse uma rotação, como A → B, teria que ser R π2 , mas não é, pois B → D. Se fosse
reflexão, seria Rv , mas não é, pois B → D e B teria que ir em A.
v) A → C
B→A
C→D
D→B
Se fosse uma rotação, como A → C, teria que ser Rπ , mas não é, pois B → A. Se fosse
reflexão, como B → A, seria Rv , mas não é, pois A → C e A teria que ir em B.
x) A → C
B→D
C→B
D→A
Se fosse uma rotação, como A → C, teria que ser Rπ , mas não é, pois D → A. Se fosse
reflexão, como D → A, seria Rh , mas não é, pois A → C e A teria que ir em D.
z) A → D
B→C
C→A
D→B
Se fosse uma rotação, como A → D, teria que ser R 3π , mas não é, pois D → B. Se fosse
2
reflexão, como A → D, seria Rh , mas não é, pois C → A e C teria que ir em B.
Tábua do simetrias do quadrado:
id
R π2
Rπ
R 3π
2
R1
Rh
R2
Rv
id
id
R π2
Rπ
R 3π
2
R1
Rh
R2
Rv
R π2
R π2
Rπ
R 3π
2
id
Rv
R1
Rh
R2
Rπ
Rπ
R 3π
2
id
R π2
R2
Rv
R1
Rh
R 3π
2
R 3π
2
id
R π2
Rπ
Rh
R2
Rv
R1
R1
R1
Rh
R2
Rv
id
R π2
Rπ
R 3π
2
Rh
Rh
R2
Rv
R1
R 3π
2
id
R π2
Rπ
R2
R2
Rv
R1
Rv
Rπ
R 3π
2
id
R π2
Rv
Rv
R1
Rh
R2
R π2
Rπ
R 3π
2
id
Isometrias no plano
43
d..2
d..2
...
...
...
...
...
..
.....
.
.
.
.....
.....
................
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.....
..
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.....
..
..... .........
..... ........
.....
.......
.......
...
..........
..... ....
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.
.....
...
.....
..... .... .........
.....
.....
..... .. .....
.....
....
... .. ...
.....
1
.............................................................................................................................................................................................
.....
.
.
.
... ... .......
.
.....
.....
.
.
.
.. ... ......
.....
.....
.
.
.
.
.
.
.
.
.
.
.
.....
.
.....
.
.....
.....
.....
.....
....
..... .........
..... .........
...
........
.......
.
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.....
...
...
.....
.....
.....
.....
..... ... .........
.....
.....
..... .. .....
.....
.....
.............
.....
....
..
.....
.....
...
...
...
...
...
..
B
C
v
A
D
...
...
...
...
...
..
.....
.
.
.
.....
.....
................
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.....
..
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.....
..... .........
..... .........
.....
.......
.......
...
..........
..... ....
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.
.....
...
.....
..... .... .........
.....
.....
..... .. .....
.....
....
... .. ...
.....
1
.............................................................................................................................................................................................
.....
.
.
.
... ... .......
.
.....
.....
.
.
.
.. ... ......
.....
.....
.
.
.
.
.
.
.
.
.
.
.
.....
.
.....
.
.....
.....
.....
.....
....
..... .........
..... .........
...
........
.......
.
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.....
...
...
.....
.....
.....
.....
..... ... .........
.....
.....
..... .. .....
.....
.....
.............
.....
....
.....
..
.....
...
...
...
...
...
..
v
D
Rπ
−→
d
A
C
B
h
d..2
...
...
...
...
...
..
.....
.
.
.
.....
.....
................
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.....
..
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.....
..... .........
..... .........
.....
.......
.......
...
..........
..... ....
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.....
.
...
.....
..... .... .........
.....
.....
..... .. .....
.....
....
... .. ...
.....
1
.............................................................................................................................................................................................
.....
.
.
.
... ... .......
.
.....
.....
.
.
.
.. ... ......
.....
.....
.
.
.
.
.
.
.
.
.
.
.
.....
.
.....
.
.....
.....
.....
.....
....
..... .........
..... .........
...
........
.......
.
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.
.....
.....
...
...
.....
.....
.....
.....
..... ... .........
.....
.....
..... .. .....
.....
.....
.............
.....
....
.....
..
.....
...
...
...
...
...
..
C
Rπ
2
−→
d
D
B
A
h
v
d
h
Figura 2.6: Composta R π2 ◦ Rπ que é igual a R 3π .
2
d..2
d..2
...
...
...
...
..
...
.....
.
.
....
.....
...............
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.. ......
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.....
.
...
.....
..
..... .........
..... .........
........
......
.....
........
.........
....
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.....
.
....
..... ..... ........
.....
.....
..... .. .....
.....
.....
.... .. .....
....
.....
1
............................................................................................................................................................................................
.
.....
... ... .......
.
.
.....
.....
.
.
... .... .......
.....
.....
.
.
.
.
.
.
.
.
.....
.....
.
.
.
.....
.....
.....
.....
....
..... .........
..... .........
...
.......
.......
...
..............
..............
.
.
.
.
.
.
.
.
.
.....
.
.....
....
...
.....
.....
.....
.....
..... .... ........
.....
.....
..... .. .....
.....
....
............
.....
.....
...
........
.....
...
...
...
...
...
..
B
C
v
A
D
...
...
...
...
..
...
.....
.
.
....
.....
.................
.
.
.
.....
.....
... ... ......
.
.....
.
.....
.
.
.. ......
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.....
.
...
.....
..
..... .........
..... .........
........
......
.....
........
.........
....
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.....
.
....
..... ..... ........
.....
.....
..... .. .....
.....
.....
.... .. .....
....
.....
1
............................................................................................................................................................................................
.....
.
... ... .......
.
.
.....
.....
.
.
... .... .......
.....
.....
.
.
.
.
.
.
.
.
.....
.....
.
.
.
.....
.....
.....
.....
....
..... .........
..... .........
...
.......
.......
...
..............
..............
.
.
.
.
.
.
.
.
.
.....
.
.....
....
...
.....
.....
.....
.....
..... .... ........
.....
.....
..... .. .....
.....
....
............
.....
.....
...
........
.....
...
...
...
...
...
..
v
A
Rv
−→
d
h
D
d..2
B
C
...
...
...
...
..
...
.....
.
.
....
.....
...............
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.. ......
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.....
.
...
.....
..
..... .........
..... .........
........
......
.....
........
.........
....
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.....
.
....
..... ..... ........
.....
.....
..... .. .....
.....
.....
.... .. .....
....
.....
1
............................................................................................................................................................................................
.....
.
... ... .......
.
.
.....
.....
.
.
... .... .......
.....
.....
.
.
.
.
.
.
.
.
.....
.....
.
.
.
.....
.....
.....
.....
....
..... .........
..... .........
...
.......
.......
...
..............
..............
.
.
.
.
.
.
.
.
.
.
.....
.....
....
...
.....
.....
.....
.....
..... .... ........
.....
.....
..... .. .....
.....
....
............
.....
.....
...
........
.....
...
...
...
...
...
..
D
Rh
−→
d
h
A
v
C
B
d
h
Figura 2.7: Composta Rh ◦ Rv que é igual a Rπ .
Da mesma forma que fizemos com o grupo de simetrias do triângulo equilátero, existe
outra forma de representar o grupo de simetrias do quadrado, que permite constatar mais
facilmente isomorfismos com outros grupos e observar generalizações. Pondo a = R π2 e
b = R1 e indicando por e a identidade, vemos que a2 = Rπ , a3 = R 3π , a4 = e, b2 = e,
2
ab = Rh , a2 b = R2 , a3 b = Rv e ba = Rv = a3 b. Portanto o grupo das simetrias do quadrado
pode ser representado por
S = {e, a, a2 , a3 , b, ab, a2 b, a3 b}
e é caracterizado, como grupo de 8 elementos, gerado por duas letras, pelas condições:
|S | = 8,
S =< a, b >,
a4 = e,
b2 = e,
ba = a3 b
Observamos que S é mais comumente indicado por D4 , o grupo diedral de ordem 8.
Nessa notação temos a seguinte tábua:
Isometrias no plano
44
d..2
d..2
...
...
...
...
...
..
.....
.
.
.
.....
.....
................
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.....
..
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.....
..
..... .........
..... ........
.....
.......
.......
...
..........
..... ....
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.
.....
...
.....
..... .... .........
.....
.....
..... .. .....
.....
....
... .. ...
.....
1
.............................................................................................................................................................................................
.....
.
.
.
... ... .......
.
.....
.....
.
.
.
.. ... ......
.....
.....
.
.
.
.
.
.
.
.
.
.
.
.....
.
.....
.
.....
.....
.....
.....
....
..... .........
..... .........
...
........
.......
.
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.....
...
...
.....
.....
.....
.....
..... ... .........
.....
.....
..... .. .....
.....
.....
.............
.....
....
..
.....
.....
...
...
...
...
...
..
B
C
v
A
D
...
...
...
...
...
..
.....
.
.
.
.....
.....
................
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.....
..
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.....
..... .........
..... .........
.....
.......
.......
...
..........
..... ....
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.
.....
...
.....
..... .... .........
.....
.....
..... .. .....
.....
....
... .. ...
.....
1
.............................................................................................................................................................................................
.....
.
.
.
... ... .......
.
.....
.....
.
.
.
.. ... ......
.....
.....
.
.
.
.
.
.
.
.
.
.
.
.....
.
.....
.
.....
.....
.....
.....
....
..... .........
..... .........
...
........
.......
.
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.....
...
...
.....
.....
.....
.....
..... ... .........
.....
.....
..... .. .....
.....
.....
.............
.....
....
.....
..
.....
...
...
...
...
...
..
v
D
R1
−→
d
C
A
B
h
d..2
...
...
...
...
...
..
.....
.
.
.
.....
.....
................
.
.
.
.....
.
.....
... ... .......
.
.....
.
.....
.
.
.....
..
.....
...
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.....
..... .........
..... .........
.....
.......
.......
...
..........
..... ....
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.....
.
.....
.
...
.....
..... .... .........
.....
.....
..... .. .....
.....
....
... .. ...
.....
1
.............................................................................................................................................................................................
.....
.
.
.
... ... .......
.
.....
.....
.
.
.
.. ... ......
.....
.....
.
.
.
.
.
.
.
.
.
.
.
.....
.
.....
.
.....
.....
.....
.....
....
..... .........
..... .........
...
........
.......
.
...
..... .........
.... .........
.
.
.
.
.
.
.
.
.
.
.....
.....
...
...
.....
.....
.....
.....
..... ... .........
.....
.....
..... .. .....
.....
.....
.............
.....
....
.....
..
.....
...
...
...
...
...
..
A
Rπ
2
−→
d
D
B
C
h
v
d
h
Figura 2.8: Composta R π2 ◦ R1 que é igual a Rv .
e
a
a2
a3
b
ab
a2 b
a3 b
e
e
a
a2
a3
b
ab
a2 b
a3 b
a
a
a2
a3
e
a3 b
b
ab
a2 b
a2
a2
a3
e
a
a2 b
a3 b
b
ab
a3
a3
e
a
a2
ab
a2 b
a3 b
b
b
b
ab
a2 b
a3 b
e
a
a2
a3
ab
ab
a2 b
a3 b
b
a3
e
a
a2
a2 b
a2 b
a3 b
b
ab
a2
a3
e
a
a3 b
a3 b
b
ab
a2 b
a
a2
a3
e
O centro e o subgrupo de comutadores de D4 são iguais, a saber, Z(D4 ) = D40 = {e, a2 }.
2.5
O grupo de simetria de um polı́gono regular de n
lados
Ao estudar os grupos de simetria do triângulo equilátero e do quadrado, observamos uma
regularidade, no sentido de que, definindo-os como grupos de letras, vemos uma forma de
generalizar. Essa generalização, como já observamos, é o chamado grupo diedral.
Definição 2.5.1. Para todo inteiro n ≥ 2, o grupo diedral Dn é dado por
Dn = {e, a, a2 , ..., an−1 , b, ab, a2 b, ..., an−1 b},
em que cada elemento a tem ordem n, o elemento b tem ordem 2 e vale a relação ba = an−1 b.
Assim, como grupo de letras, o grupo diedral de ordem 2n pode ser definido como
|Dn | = 2n,
Dn =< a, b >,
an = e,
b2 = e,
ba = an−1 b
O escopo de nossos estudos, daqui para diante, é provar que o grupo de simetrias do
polı́gono regular de n lados é Dn , para todo n ≥ 3.
Começaremos com a
Isometrias no plano
45
Proposição 2.5.2. Seja P um polı́gono regular de n lados e G seu grupo de simetrias. Seja a
a rotação de 2π/n (no sentido anti-horário) em torno do baricentro de P. Então o subgrupo
gerado por a é < a >= {e, a, a2 , .., an−1 } e inclui todas as rotações de G.
Prova: Podemos supor, a menos de uma translação, de uma rotação e de uma homotetia,
que P está na posição canônica. Seja O o centro das coordenadas. Logo O é o baricentro
de P. Os vértices V1 , V2 , ..., Vn de P, vistos como vetores, fazem ângulo de 2π/n de cada
um para o seguinte. Assim, a rotação a de 2π/n com centro em O leva V1 em V2 , V2 em V3 ,
..., Vn−1 em V1 . Portanto a ∈ G. Ainda, an = e, pois equivale à rotação de 2π, e aj 6= e
para todo 1 ≤ j < n. Isto prova que < a >= {e, a, a2 , .., an−1 }. Por outro lado, seja ρ uma
rotação de G. Vimos que o centro de ρ é O. Ainda, ρ leva V1 em outro vértice, digamos Vj .
Logo ρ = aj−1 . Assim ρ ∈< a >, e terminamos.
Proposição 2.5.3. Seja P um polı́gono regular de n lados em posição canônica. Então a
reflexão b em torno do eixo Ox pertence ao grupo de simetrias de P.
Prova: Seja P = V1 V2 ...Vn um polı́gono regular em posição canônica. Sabemos que toda
isometria aplica segmento sobre segmento. Assim basta provar que b aplica os vértices de P
situados no semiplano superior
sobre os vértices)de P situados no semiplano inferior.
(
2(j−1)π
Lembremos que Vj = cos n , sen 2(j−1)π
, 1 ≤ j ≤ n. Observemos incialmente que
n
V1 está no eixo Ox, pois V1 = (cos 0, sen 0) = (1, 0). Logo (b(V1 ) = V1 . Convém também
)
2(k+1−1)π
2(k+1−1)π
observar que se n é par, digamos, n = 2k, temos Vk+1 = cos
, sen
=
n
n
(
)
2kπ
2kπ
cos n , sen n = (cos π, sen π) = (−1, 0). Se n é ı́mpar, digamos, n = 2k + 1, P não tem
outros vértices em Ox que não V1 .
Suponhamos primeiro que n = 2k é par. Os vértices de P situados no semiplano superior,
contados no sentido anti-horário, a partir de V2 são Vj , 2 ≤ j ≤ k. Os vértices de P situados
no semiplano inferior, contados no sentido horário, a partir de Vn são Vn−j+2 , 2 ≤ j ≤ k.
Queremos provar que Vj é o simétrico de Vn−j+2 , para todo 2 ≤ j ≤ k. Temos:
(
)
2(n − j + 2 − 1)π
2(n − j + 2 − 1)π
Vn−j+2 = cos
, sen
=
n
n
( [
]
[
])
2(j − 1)π
2(j − 1)π
, sen 2π −
=
= cos 2π −
n
n
(
) (
)
−2(j − 1)π
−2(j − 1)π
2(j − 1)π
2(j − 1)π
= cos
, sen
= cos
, − sen
= Vj
n
n
n
n
para todo 2 ≤ j ≤ k. Fica provada a afirmação no caso em que n é par.
Suponhamos agora que n = 2k + 1 é ı́mpar. Os vértices de P situados no semiplano
superior, contados no sentido anti-horário, a partir de V2 são Vj , 2 ≤ j ≤ k + 1. Os vértices
de P situados no semiplano inferior, contados no sentido horário, a partir de Vn são Vn−j+2 ,
2 ≤ j ≤ k + 1. Com os mesmos cálculos feitos acima temos que Vj é o simétrico de Vn−j+2 ,
para todo 2 ≤ j ≤ k. Fica provada a afirmação no caso em que n é ı́mpar.
Isometrias no plano
46
Teorema 2.5.4. O grupo de simetrias do polı́gono regular de n lados é o grupo diedral de
2n elementos Dn .
Prova: Podemos supor, a menos de uma translação, de uma rotação e de uma homotetia,
que P está na posição canônica. Seja O o centro das coordenadas. Logo O é o baricentro
de P. Seja G o grupo de simetrias de P. Vimos, na Proposição 2.5.2, que a rotação a de
2π/n (no sentido anti-horário) em torno do baricentro de P é um elemento de G, e que o
subgrupo gerado por a é < a >= {e, a, a2 , .., an−1 } e inclui todas as rotações de G. Vimos
também, na Proposição 2.5.3, que a reflexão b em torno do eixo Ox pertence a G. Portanto
todos os elementos aj b, com 1 ≤ j < n, pertencem a G. Portanto, G contém o grupo diedral
Dn gerado pelos elementos a e b, conforme a regra
|Dn | = 2n,
Dn =< a, b >,
an = e,
b2 = e,
ba = an−1 b
Seja agora T um elemento qualquer de G. Vimos que T é uma rotação com centro em O
ou uma reflexão em torno de uma reta que passa por O. Se T é uma rotação, a Proposição
2.5.2 garante que T ∈< a >, logo T ∈ Dn . Suponhamos agora que T é uma reflexão em
torno de uma reta r que passa por O. Seja α o ângulo que r faz com o eixo Ox, medido no
sentido anti-horário. Vimos, na Seção 1.10, que as equações em coordenadas de T são
{
x1 = x cos 2α + y sen 2α
y1 = x sen 2α − y cos 2α
Portanto, as equações em coordenadas de T ◦ b são
{
x1 = x cos 2α − y sen 2α
y1 = x sen 2α + y cos 2α
Mas, conforme vimos na Seção 1.9, essa é a rotação de ângulo 2α com centro na origem.
Mas toda rotação de G está em Dn . Assim T ◦ b ∈ Dn , do que segue T = T ◦ b ◦ b−1 ∈ Dn .
Logo G ⊂ Dn , e provamos que G = Dn .
Vemos, por esse resultado, que as reflexões do grupo de simetrias de um polı́gono regular
P, de n lados, são as isometrias ak b, 0 ≤ k ≤ n − 1. Vamos descrevê-las geometricamente.
Sabemos que a é a rotação de ângulo α = 2π/n, logo ak é a rotação de ângulo kα = 2kπ/n.
Assim, em coordenadas, temos
ak (x, y) = (x cos kα − y sen kα, x sen kα + y cos kα)
Portanto
ak b(x, y) = (x cos kα + y sen kα, x sen kα − y cos kα)
Vimos, na Seção 1.10, que essas são as equações em coordenadas da reflexão em torno
da reta r que passa pela origem e faz um ângulo de kα/2 = kπ/n com o eixo Ox (no sentido
anti-horário).
Temos assim a
Isometrias no plano
47
Proposição 2.5.5. Seja P um polı́gono regular de n lados em posição canônica. As reflexões
do grupo de simetrias de P são as que têm como eixo de simetria as retas que passam pela
origem e fazem um ângulo de kπ/n com o eixo Ox (no sentido anti-horário).
Observamos que as retas de simetria dessas reflexões são as que passam pela origem e
pelos vértices de P, ou pela origem e pelos pontos médios dos lados de P.
Referências Bibliográficas
[1] Artin, M. Algebra. New Jersey, Prentice Hall, 1991.
[2] Barbosa, J. L. M. Geometria Euclidiana Plana. Décima Edição. Coleção do Professor
de Matemática. Rio de Janeiro, Sociedade Brasileira de Matemática, 2006.
[3] Hvidsten, M. Geometry. Boston, McGrawHill, 2006.
[4] Lima, E. L. Coordenadas no Plano. Coleção do Professor de Matemática. Rio de Janeiro,
Sociedade Brasileira de Matemática, 2002.
[5] Lima, E. L. Isometrias. Coleção do Professor de Matemática. Rio de Janeiro, Sociedade
Brasileira de Matemática, 2007.
48
Download