ROBÔS MANIPULADORES
Nuno Ferreira
Departamento de Engenharia Electrotécnica
Instituto Superior de Engenharia de Coimbra
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
1
Robôs Manipuladores
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
2
Modelização
A modelização de um manipulador robótico
requer o estabelecimento da cinemática e da
dinâmica.
A cinemática trata do estudo analítico da geometria
do movimento de um braço robótico.
A dinâmica relaciona as posições, velocidades e
acelerações que ocorrem numa trajectória com as
forças/binários fornecidos pelos actuadores.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
3
Cinemática
Um manipulador robótico
pode ser modelizado como
uma cadeia articulada de
elos rígidos interligados por
juntas (rotacionais ou
prismáticas) movidas por
actuadores.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
Robô
ABB IRB 60
4
Cinemática
Uma das extremidades
da cadeia está ligada a
uma base de suporte,
enquanto que a outra é
livre e possui um órgão
terminal para a
manipulação de objectos
e a realização de tarefas
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
5
Cinemática
O movimento combinado das
juntas resulta no movimento dos
elos que posicionam o órgão
terminal.
Kuka KR125L90
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
6
Cinemática
Relação geométrica que envolve as coordenadas
na região de trabalho {x, y} e as variáveis nas
articulações {q1, q2}.
O sentido da transformação de coordenadas:
{
{
cinemática directa {q1, q2} −> {x, y}
cinemática inversa {x, y} −> {q1, q2}
Em qualquer dos casos pode-se estabelecer uma
relação diferencial (em ordem ao tempo) de onde
resulta a cinemática diferencial.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
7
Cinemática
Duas propriedades importantes: y
Cotovelo para cima
{ Na cinemática directa existe
só uma solução;
J
{ Na cinemática inversa podem
l
existir várias soluções;
l2
2g
1
{
{
“cotovelo em cima”
“cotovelo em baixo”
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
J1g
q2
Cotovelo para baixo
J2m
q1
x
J1m
8
Cinemática - Directa
Definindo Pi como sendo o vector que vai da base
do sistema de eixos Oxy até á extremidade do elo i,
tem-se P1 = P1’ e P2 = P1’ + P2’.
cos q1
P1 ' = l1
sen
q
2
cos (q1 + q 2 )
P2 ' = l2
(
)
+
sen
q
q
1
2
na forma matricial:
x l1. cos q1 + l 2 . cos (q1 + q 2 )
y = l .sen q + l .sen (q + q )
1
1
2
1
2
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
9
Cinemática Diferencial de 1ª de 2ª
Ordem
Relação entre a velocidade das juntas e
a velocidade cartesiana do manipulador
q& 1
x&
y& = J q&
2
− l1.senq1 − l2 .sen (q1 + q2 ) − l2 .sen (q1 + q2 )
J=
(
)
(
)
l
.
cos
q
l
.
cos
q
q
l
.
cos
q
q
+
+
+
1
2
1
2
2
1
2
1
Ao derivar a expressão do Jacobiano obtém-se as equações da
aceleração
&x& − l1 . sen q 1
&y& = l . cos q
1
1
Nuno Miguel Fonseca Ferreira
− l 2 . sen (q 1 + q 2 ) &q&1 l1 . sen q 1
−
l 2 . cos (q 1 + q 2 ) &q&1 + &q& 2 l1 . cos q 1
Controlo de Robôs Manipuladores
l 2 . sen (q 1 + q 2 ) q& 12
l 2 . cos (q 1 + q 2 ) (q& 1 + q& 2 )2
10
Cinemática - Inversa
Se (x, y) estiver fora da área de trabalho do braço robô,
não é possível encontrar uma solução
No caso do ponto (x, y) estar dentro do espaço de trabalho
podem existir uma ou mais soluções.
−1 y
l 2 .senq2
−1
tan
tan
−
l + l . cos q
x
2
q1
1 2
=
q 2 −1 x 2 + y 2 − l12 − l 22
cos
l
l
2
.
.
1
2
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
11
Cinemática – Diferencial Inversa de 1ª
Ordem
As velocidades dos ângulos das juntas, são obtidas
encontrando o Jacobiano inverso (J−1)
&
q& 1
-1 x
q& = J y&
2
l2 sen(q1 + q2 )
q&1
l2 cos(q1 + q2 )
x&
1
=
q& l l senq − l cos q − l cos( q + q ) − l senq − l sen(q + q ) y&
1
2
1
2
1
1
1
2
2 1
1 2
2
444
44
441 44
44
4
24
444
44
42444
44
3
J −1
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
12
Cinemática – Diferencial Inversa de 2ª
Ordem
&q&1
l 2 . cos(q 1 + q 2 ) l 2 . sen(q 1 + q 2 ) &x&
1
(&q& + &q& ) =
− l . cos q
&y&
−
l
.
sen
q
l
.
l
sen
q
1
1
1
1
2
1
1 2
2
l1 .l 2 . cos q 2
1
+
l1 .l 2 sen q 2 − l12 1
Nuno Miguel Fonseca Ferreira
2
&
q
l
1
2
− l1 .l 2 . cos q 1 (q& 1 + q& 2 )
2
2
Controlo de Robôs Manipuladores
13
Cinemática – Inversa
No caso de x = y= 0 e considerando l1 = l2, obtémse uma solução indeterminada.
Se o manipulador estiver na origem e l1=l2, existem
infinitas soluções, pois qualquer ângulo q1 é
admissível.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
14
Robôs Manipuladores
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
15
Região de Trabalho
A região de trabalho corresponde à zona
onde o robô pode manipular a sua “mão”
A região/área de trabalho do robô é
determinada pelas seguintes
características;
- estrutura cinemática do robô;
- comprimento dos seus elos;
- limitações dos movimentos das juntas.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
16
Região de Trabalho
Exemplo de
Robôs da ABB:
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
17
Região de Trabalho
Outros Robôs da ABB:
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
18
Região de Trabalho
Problemas geométricos relacionados com o espaço
de trabalho.
As trajectórias no espaço cartesiano apresentam
alguns problemas nomeadamente:
os pontos intermédios que não são alcançáveis;
valores elevados das velocidades nas juntas,
perto das singularidades do robô;
trajectórias apresentam diferentes soluções.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
19
Região de Trabalho
os pontos intermédios que não são alcançáveis;
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
20
Região de Trabalho
valores elevados das velocidades nas juntas,
perto das singularidades do robô;
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
21
Região de Trabalho
Começo e meta alcançável em soluções
diferentes;
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
22
Robôs Manipuladores
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
23
Planeamento de Trajectórias
O planeamento de trajectórias consiste na
especificação do caminho que o órgão terminal do
robô deve percorrer quer no espaço quer no tempo.
Por outras palavras, não são somente os pontos
por onde o robô deve passar que devem ser
especificados, mas também os instantes em que
são alcançados esses pontos.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
24
Planeamento das Trajectórias
A
C
B
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
25
Planeamento das Trajectórias
A definição da trajectória
pode ser feita quer no
espaço cartesiano quer no
espaço das juntas.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
26
Planeamento das Trajectórias
As trajectórias definidas no espaço cartesiano
encontram-se mais adaptadas para uma fácil
visualização mas, por outro lado, acarretam uma
carga computacional mais elevada quando se faz
apelo à cinemática inversa.
A definição das trajectórias no espaço das juntas
coloca uma carga computacional mais reduzida
mas, em contrapartida, torna-se difícil antever qual
a trajectória executada pelo robô no espaço
operacional
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
27
Planeamento das Trajectórias
Planeamento de Trajectórias no Espaço Cartesiano
{s(t ), v(t ), a (t )} → {x(t ), y(t )}
Planeamento de Trajectórias no Espaço das Juntas
{s(t ), v(t ), a (t )} → {q1 (t ), q 2 (t )}
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
28
Planeamento das Trajectórias
O planeamento de trajectórias pode ser abordado de
duas formas distintas
{
Especificação de um conjunto de pontos pelos
quais o órgão terminal do robô deve passar, em
determinados instantes, complementadas com
restrições de posição, velocidade e aceleração que
têm de ser cumpridas.
{
Especificação do tipo de movimento a ser efectuado
pelo órgão terminal, nomeadamente, através de
trajectórias do tipo rectilíneo.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
29
Planeamento das Trajectórias
+ Suave
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
30
Robôs Manipuladores
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
31
Dinâmica
O estudo da dinâmica do braço do robô é
importante para a simulação, testando-se
diferentes estratégias de controlo sem que isso
implique custos e eventuais problemas mecânicos
que podem ocorrer com robôs reais.
É ainda de salientar que o estudo da dinâmica é
também importante para a análise do manipulador
na sua concepção mecânica.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
32
Dinâmica
Relaciona as posições,
velocidades e acelerações,
que ocorrem numa trajectória
do robô, com as
correspondentes
forças/binários requeridos aos
actuadores.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
33
Dinâmica
A dinâmica segue as leis da física clássica e pode ser
expressa através de uma relação diferencial:
{q i ( t ), q& i ( t ), &q&i ( t )} Dinâmica
Inversa
→ { T( t )}
{ T( t ), q i ( t = 0), q& i ( t = 0)} Dinâmica
Directa
→ {&q&i ( t ), q& i ( t ), q i ( t )}
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
34
Dinâmica − Inversa
A dinâmica inversa para um robô com n eixos pode
ser expressa por um conjunto de equações
diferenciais não lineares da forma simbólica :
T = J (q )q&& + C (q, q& ) + G (q )
T representa o vector n × 1 dos binários dos
actuadores;
J é a matriz simétrica das inércias, de dimensão n ×
n;
C é o vector, n × 1 dimensional, dos binários/forças
coriolis/centrípetos;
G é o vector, n × 1 dimensional, dos binários/forças
gravitacionais.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
35
O Robô RR
y
l2
q2
J2g
l1
J1g
J2m
q1
x
J1m
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
36
Dinâmica Inversa do Robô RR
(m1 + m 2 )r12 + m 2 r2 2 + m 2 r2 2 +
2m 2 r1r2C 2 + J1m + J1g
m 2 r1r2C 2
J (q ) =
2
m
r
2
2 2 +
m 2 r2 + m 2 r1r2C 2
J 2 m + J 2 g
− m 2 r1r2S2q& 2 2 − 2m 2 r1r2S2q& 1q& 2
C (q, q& ) =
2
m 2 r1r2S2q& 1
g(m1r1C1 + m 2 r1C1 + m 2 r2C12 )
G (q ) =
gm
r
C
2 2 12
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
37
Dinâmica − Directa
A dinâmica directa corresponde à integração da
expressão
q&&(t) = J(q)−1 [T − C(q, q&) − G(q)]
t
q&(t) = ∫ q&& dt + q&(0)
0
t
q(t) = ∫ q& dt + q(0)
0
Normalmente adopta-se um método numérico de
integração que seja computacionalmente eficiente.
Neste sentido é de referir o algoritmo de Runge-Kutta
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
38
Robôs Manipuladores
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
39
Controlo de Posição
Uma vez desenvolvido um modelo do sistema
manipulador é necessário considerar o seu controlo
nomeadamente, as variáveis de posição/velocidade
e variáveis de força.
O controlo de posição tem o objectivo de assegurar
que uma sequência de movimentos planeados seja
executada correctamente, face a eventuais erros
resultantes das limitações computacionais e efeitos
mecânicos.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
40
Controlo de Posição
As estratégias de controlo de posição são
adequadas para tarefas onde o manipulador
não interactua significativamente com os
objectos na região de trabalho, tais como, a
transferência de materiais, a pintura ou a
soldadura por pontos.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
41
Controlo de Posição
“transferência de materiais”
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
42
Controlo de Posição
“soldadura por pontos”
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
43
Controlo de Posição “Pintura”
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
44
Controlo de Posição
A formulação básica de um algoritmo de controlo
consiste na medição da posição do braço manipulador
durante o movimento, na comparação com a posição
desejada e, consequentemente, no desenvolvimento
de uma actuação com vista a eliminar o eventual erro.
Desenvolvimento de algoritmos visa o controlo das
variáveis posição, velocidade e força/binário de
acordo com as tarefas a executar.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
45
Controlo de Posição
Desta forma, são apresentadas várias alternativas
de controlo, nomeadamente:
{
{
controladores lineares versus não-lineares,
controladores baseados em modelos.
Algoritmos concebido no espaço das juntas do
manipulador
Algoritmos concebido no espaço das no espaço
cartesiano do manipulador
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
46
Controlo de Posição
Controlo Baseado No Espaço Cartesiano:
{
{
{
{
A alteração do algoritmo de controlo acarreta cálculos
suplementares na malha de realimentação, devido às
transformações cinemáticas.
Assim, a mudança da estratégia de controlo do espaço
das juntas para o espaço cartesiano pode ter vantagens e
inconvenientes.
os algoritmos são implementados com uma frequência de
amostragem mais baixa do que os sistemas de controlo
baseado nas juntas.
A diminuição da frequência de amostragem, acarreta uma
degradação da estabilidade do sistema.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
47
Robôs Manipuladores
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
48
Controlo de Posição/Força
O controlo de posição/força é
necessário em trabalhos que
envolvam o controlo de posição
segundo certas direcções no
espaço de trabalho e um controlo
de força de contacto entre o órgão
terminal do robô e a superfície de
restrição nas restantes direcções.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
49
Controlo de Posição/Força
As
estratégias de controlo de posição/força são
adequadas para tarefas tais como a:
montagem;
polimento;
Rebarbagem;
tarefas que envolvem contacto.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
50
Controlo de Posição/Força
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
51
Modelo do Controlo de
Posição/Força
yc
y
xc
l2
q2
J2g
l1
J1g
J2m
q1
θ
x
J1m
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
52
Modelo da Superfície de
Restrição
Força:
Fxc = M ⋅ &x&c + B ⋅ x& c + K ⋅ ( xc − xco )
Deslocamento:
xco = r1sen(θ − q10 ) + r2 sen(θ − q10 − q 20 )
T = H(q)q&& + C(q, q&) + G(q) − J T (q)F
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
53
CONTROLO HÍBRIDO
Yc
Ycd
qes
−
S
+
I−S
Fcd
Cinemática
Jc−1
JcT
τff
−
Nuno Miguel Fonseca Ferreira
I−S
JcT
+
+
τes
+
Controlador
de Posição
τP
+
τF
Controlador
de Força
Controlo de Robôs Manipuladores
q
Robô
e
Ambiente
Fc
54
ALGORITMOS CLASSICOS (PIDs)
• Controlo de Posição : PD
qes = J c−1 S (Ycd − Yc )
C P = aP q& es + bP qes
• Controlo de Força : PI
τ ff = J cT (I − S )Fcd
τ es = J cT (I − S )(Fcd − F )
CF = aF ∫ τ es dt + bF τ es
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
55
EXEMPLO: CONTROLO HÍBRIDO
Parâmetros do
robô RR:
i
1
2
A superficie de restrição:
ri (m)
0.5
6.25
mi (kg)
1
0.8
Jig(kgm2)
1.0
1.0
Jim(kgm2)
4.0
4.0
{θ,M,B,K}≡{π/2,103,1.0,102}
Trajectória: {x,y}≡{1,1}
Perturbação: {δycd,δFcd} = {10−1,0} and {δycd,δFcd} = {0,10}
Os Controladores de Posição e Força:
PD/PI: {Kp,Kd}≡{104,103}, {Kp,Ki}≡{103,102}
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
56
RESPOSTA TEMPORAL DO CONTROLADOR CH
PARA UMA FORÇA DE 10N APLICADA NA
SUPERFÍCIE DE CONTACTO
20
Referência
CH
15
10
dFxc(N)
5
0
-5
-10
0
0.5
Nuno Miguel Fonseca Ferreira
1
1.5
2
Tempo (s)
2.5
Controlo de Robôs Manipuladores
3
3.5
4
57
DESLOCAMENTO DA SUPERFÍCIE DE
CONTACTO
0.01
Referência
CH
0.008
0.006
0.004
0.002
dxc(m)
0
-0.002
-0.004
-0.006
-0.008
-0.01
0
0.5
Nuno Miguel Fonseca Ferreira
1
1.5
2
Tempo (s)
2.5
Controlo de Robôs Manipuladores
3
3.5
4
58
RESPOSTA TEMPORAL PARA O ROBÔ IDEAL 2R
-4
15
dyc
PID
FO
0.14
0.12
x 10
dFc
PID
FO
0.1
10
0.06
dy(m)
dy(m)
0.08
0.04
5
0.02
0
0
-0.02
-0.04
0.1
0
0.1
0.2
0.3
Time (s)
0.4
0.5
0.6
-5
0
0.15
dyc
PID
FO
0.08
0.1
0.2
0.3
Time (s)
0.4
0.5
0.6
dFc
PID
FO
0.06
0.1
0.04
0
dFx(N)
dFx(N)
0.02
-0.02
0.05
-0.04
0
-0.06
-0.08
-0.1
0
0.1
0.2
0.3
Time (s)
Nuno Miguel Fonseca Ferreira
0.4
0.5
0.6
-0.05
0
Controlo de Robôs Manipuladores
0.1
0.2
0.3
Time (s)
0.4
0.5
0.6
59
Controlador em Cascata
P
L
A
N
E
A
M
E
N
T
O
P/F
Fd
+
xd
─
Cp
Controlador
de Posição
x
+
+
─
CF
Controlador
de Força
F
Cinemática
τ
Robô
Forças
Posição
Ambiente
Cinemática
Velocidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
60
RESPOSTA EM FREQUÊNCIA
CONTROLO HÍBRIDO vs CONTROLO EM CASCATA
10
100
CH
CC
CH
CC
90
0
80
-10
70
|Fx(w)/yd(w)|
|y(w)/yd(w)|
60
-20
50
-30
40
30
-40
20
-50 -1
10
0
10
1
10
2
w(rad/s)
Nuno Miguel Fonseca Ferreira
10
3
10
4
10
10 -1
10
Controlo de Robôs Manipuladores
0
10
1
10
2
w(rad/s)
10
3
4
10
10
61
A ocorrência de impactos
Trajectória
y
yc
{xi,yi}
xc
l2
q2
J2g
l1
J1g
θˆc
q1
J1m
Nuno Miguel Fonseca Ferreira
J2m
θc
x
Controlo de Robôs Manipuladores
62
Sem Erro de estimação na inclinação θc da
Superfície de Restrição. Exemplo: θc= 45º.
0.01
0.02
Referência
CH
CC
0.008
Referência
CH
CC
0.015
0.006
0.004
0.01
0.002
dx(m)
dy(m)
0
0.005
-0.002
0
-0.004
-0.006
-0.005
-0.008
-0.01
1
1.5
2
2.5
Tempo (s)
250
0.006
100
0.004
50
2.5
Referência
CH
CC
0.002
dxc(m)
0
0
-50
-0.002
-100
-0.004
-150
-0.006
-200
-0.008
-250
1
2
Tempo (s)
0.008
150
dFxc(N)
1.5
0.01
Referência
CH
CC
200
-0.01
1
1.5
2
2.5
-0.01
1
Tempo (s)
Nuno Miguel Fonseca Ferreira
1.5
2
2.5
Tempo (s)
Controlo de Robôs Manipuladores
63
Erro de estimação na inclinação θc da Superfície
de Restrição. Exemplo: θc= 44º.
0.025
0.03
Referência
CH
CC
0.02
Referência
CH
CC
0.02
0.015
0.01
0.01
0.005
dx(m)
dy(m)
0
0
-0.005
-0.01
-0.01
-0.015
-0.02
-0.02
-0.025
1
1.5
250
Tempo(s)
2
2.5
Tempo (s)
2
0.006
100
0.004
50
2.5
Referência
CH
CC
0.008
150
0.002
dxc(m)
dFxc(N)0
0
-50
-0.002
-100
-0.004
-150
-0.006
-200
-0.008
-250
1
1.5
0.01
Referência
CH
CC
200
-0.03
1
1.5
Tempo (s)
Nuno Miguel Fonseca Ferreira
2
2.5
-0.01
1
Controlo de Robôs Manipuladores
1.5
Tempo (s)
2
2.5
64
Erro de estimação na inclinação θc da Superfície
de Restrição. Exemplo: θc= 46º.
0.01
0.02
Referência
CH
CC
0.008
Referencia
CH
CC
0.015
0.006
0.01
0.004
0.005
0.002
dx(m)
dy(m)
0
-0.002
0
-0.005
-0.004
-0.01
-0.006
-0.015
-0.008
-0.01
1
1.5
Tempo (s)
2
250
2.5
0.006
100
0.004
50
2
2.5
Referência
CH
CC
0.002
dxc(m)
0
0
-50
-0.002
-100
-0.004
-150
-0.006
-200
-0.008
-250
1
Tempo (s)
0.008
150
dFxc(N)
1.5
0.01
Referência
CH
CC
200
-0.02
1
1.5
Tempo (s)
Nuno Miguel Fonseca Ferreira
2
2.5
-0.01
1
1.5
2
2.5
Tempo (s)
Controlo de Robôs Manipuladores
65
O erro quadrático da resposta temporal de ε versus
a estimação do ângulo de orientação para CH e o
CC com δyd = 10−3 m
7
x 10
-5
5
CH
CC
x 10
-5
CH
CC
4.5
6
4
5
3.5
εdy (m)
ε dx (m) 4
3
3
2.5
2
1.5
2
1
1
0.5
0
43
3
x 10
43.5
44
4
44.5
45
45.5
Orientation (graus)
46
46.5
0
43
47
1.6
CH
CC
x 10
43.5
44
-5
44.5
45
45.5
Orientation (graus)
46
46.5
47
CH
CC
1.4
2.5
1.2
2
εdxc(m)
εdFxc (Nm)
1.5
1
0.8
0.6
1
0.4
0.5
0.2
0
43
43.5
44
44.5
45
45.5
Orientation (graus)
Nuno Miguel Fonseca Ferreira
46
46.5
47
0
43
43.5
Controlo de Robôs Manipuladores
44
44.5
45
45.5
Orientation (graus)
46
46.5
47
66
O erro quadrático da resposta temporal de ε versus
a estimação do ângulo de orientação para CH e o
CC com δFd = 10−3 m
16
x 10
-13
9
CH
CC
x 10
-13
CH
CC
8
14
7
12
6
εdx (m)
10
ε dy (m) 5
8
4
3
6
2
4
1
2
43
7
x 10
43.5
44
-5
44.5
45
45.5
Orientação (graus)
46
46.5
47
0
43
7
CH
CC
6
6
5
5
dFxc (m) 4
ε dxc (m) 4
3
3
2
2
1
1
ε
0
43
43.5
44
44.5
45
45.5
Orientation (graus)
Nuno Miguel Fonseca Ferreira
46
46.5
47
x 10
0
43
43.5
44
-13
44.5
45
45.5
Orientation (graus)
46
46.5
47
CH
CC
43.5
Controlo de Robôs Manipuladores
44
44.5
45
45.5
Orientation (graus)
46
46.5
47
67
ROBÔS MANIPULADORES
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
68
Cooperação entre Robôs
Manipuladores
Os manipuladores
robóticos quando
utilizados em
cooperação podem
realizar outro tipo de
tarefas, à semelhança
do que se passa com
o ser humano;
Nuno Miguel Fonseca Ferreira
y
Robô A
Controlo de Robôs Manipuladores
(x2,y2)
Robô B
l0
α0
(x1,y1)
lb
x
69
Cooperação entre Robôs
Manipuladores
A cooperação entre os braços permite a realização
de tarefas de uma forma mais rápida e precisa;
O ser humano utiliza os dois braços muitas vezes
por auxilio diminuído os esforços aplicados;
No entanto a existência de uma cadeia fechada de
elos representa um desafio para o controlo de
movimento e das forças internas em cada um dos
robôs;
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
70
Cooperação entre Robôs
Manipuladores
A utilização de dois
braços, permite
executar tarefas com
objectos longos ou
largos, que se forem
apenas suportados por
um dos lados são
usualmente difíceis de
carregar;
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
71
Cooperação entre Robôs
Manipuladores
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
72
Cooperação entre Robôs
Manipuladores
Vantagens e desvantagens de ter N
robôs cooperantes.
Arquitecturas de Controlo de
Posição/Força de Manipuladores
cooperantes.
{
{
Diferentes Algoritmos de Controlo
Diferentes Modelos do Objecto
Índices de manipulabilidade
(Desempenho)
Índices de equilíbrio/desequilíbrio.
Índices de esforço da distribuição de:
{
{
{
Binários
Energia
Estabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
73
Controlo de Posição/Força de
Manipuladores Cooperantes
P
L
A
N
E
A
M
E
N
T
O
P/F
Fd
+
xd
─
Cp
Controlador
de Posição
x
+
+
─
CF
Controlador
de Força
F
Cinemática
τ
Robôs
Forças
Posição
Objecto
Cinemática
Velocidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
74
RESPOSTA TEMPORAL PARA DOIS ROBÔS
IDEAIS A SUPORTAREM UM OBJECTO
0.2
0.06
Referência
PD/PI
FO
0.18
Referência
PD/PI
FO
0.04
0.16
0.14
0.02
0.12
dxA(m)
dyA(m) 0
0.1
0.08
-0.02
0.06
0.04
-0.04
0.02
0
0
0.1
0.2
0.3
0.4
600
0.5
Tempo (s)
0.6
0.7
0.8
0.9
1
-0.06
0
Referência
PD/PI
FO
500
0.2
0.3
0.4
0.5
Tempo (s)
0.6
0.7
0.8
0.9
1
Referência
PD/PI
FO
50
400
0
300
dFyA(N)
dFxA(N)
-50
200
-100
100
-150
0
-200
-100
0
0.1
100
0.1
0.2
0.3
0.4
0.5
Tempo (s)
Nuno Miguel Fonseca Ferreira
0.6
0.7
0.8
0.9
1
-250
0
0.1
0.2
Controlo de Robôs Manipuladores
0.3
0.4
0.5
Tempo (s)
0.6
0.7
0.8
0.9
1
75
ROBÔS MANIPULADORES
1.
2.
3.
4.
5.
6.
7.
8.
9.
Modelização
Cinemática
Região de Trabalho
Planeamento das Trajectórias
Dinâmica
Controlo de Posição
Controlo de Posição/Força
Cooperação entre Manipuladores
Manipulabilidade
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
76
Manipulabilidade
A manipulabilidade é um indicador do desempenho
das tarefas do robô na sua região de trabalho
Yoshikawa, propos para um robô o seguinte indice:
µ= [det(J JT)]½
O calculo de µ para um robô é relativamente fácil
A definição e o calculo de µ é mais complexo se
considerarmos mais do que um robô
Adoptou-se uma aproximação numérica para
ultrapassar este problema
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
77
Manipulabilidade
O método numérico consiste em:
i) gerar uma amostragem aleatória de n pontos dentro de uma
esfera de raio ρ no espaço das juntas com centro em (q1c,…,qkc)
ii) Mapeando os pontos através da cinemática directa para o espaço
operacional, (uma elipsoide com centro em (xc,yc).
iii) O tamanho e a forma de cada elipsoide determina a amplificação
entre o espaço das juntas e o espaço operacional.
A amplificação está relacionada com os valores próprios do
Jacobiano e correspondem à area da elipsoide.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
78
Manipulabilidade
q2
y
(q1c,q2c)
(xc,yc)
x
q1
Cinemática Directa
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
79
Manipulabilidade
Método de Yoshikawa
µ = det( JJ T ) = l1l 2 sen q 2
Método Numérico
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
80
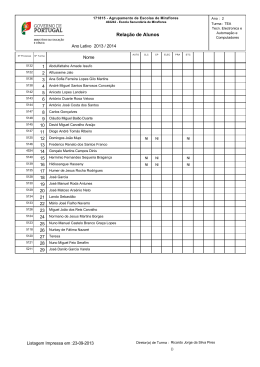
Manipulabilidade
Foram considerados alguns sub-indices para simplificar o estudo
da manipulabilidade de vários braços:
•O sub-indice µ1 representa o valor máximo de µ, em todas as
possibilidades da região de trabalho W.
µ1 = Max [ µ(x,y),∀ (x,y) ∈ W ]
(2)
• O sub-indice µ2 é o volume médio de µ considerando apenas a
região de trabalho W onde µ ≠ 0 .
µ2 = Av [ µ(x,y),∀ (x,y) ∈ W: µ (x,y)≠0 ]
(3)
• O sub-indice µ3 é o volume médio de of µ, em todas as
possibilidades da região de trabalho W.
µ3 = Av [ µ(x,y),∀ (x,y) ∈ W ]
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
(4)
81
Manipulabilidade
1
l0=1(m)
0.8
0.4
α0=0 (Deg)
µ1
µ
0.4
2 0.2
0.2
0.1
0
4
4
3
µ3
0
1
l =1(m)
0.3
α0=0 (Deg)
l1/l2
0.2
0.1
0
4
4
3
3
2
1
0
Nuno Miguel Fonseca Ferreira
1
0
2
1
0
0
2
3
2
lb(m)
0
4
3
2
0.4
l1/l2
0
4
3
2
1
α0=0 (Deg)
0.3
0.6
l1/l2
l0=1(m)
1
0
lb(m)
A manipulação µ1, µ2 e µ3 na
região de trabalho de dois
robôs a trabalharem em
cooperação para lb ∈ [0, 4[
versus l1/l2 com l1+l2=2m, e
l0 = 1m considerando α0 = 0.
lb(m)
Controlo de Robôs Manipuladores
82
Manipulabilidade
Exemplo: Robô 1 = Robô 2 {l1 = l2 = 1 m}
l0=0(m)
0.6
0.6
l 0=0.5(m)
0.5
0.5
µ1
0.4
µ1 0.3
0.4
0.3
0.2
0.2
0.1
0.1
0
0
100
100
4
0
α0 (Deg) -100
0.6
2
1
α0 (Deg) -100
lb(m)
0
4
3
0
3
2
1
0
lb(m)
l 0=1.5(m)
l 0=1(m)
0.4
0.5
µ1
0.4
0.3
0.3
µ1 0.2
0.2
0.1
0.1
0
0
100
4
3
0
α0 (Deg)
2
-100
1
0
100
4
3
0
l b(m)
α0 (Deg)
2
-100
1
0
l b(m)
µ1 = Max [ µ(x,y),∀ (x,y) ∈ W ]
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
83
Manipulabilidade
Exemplo: Robô 1 = Robô 2 {l1 = l2 = 1 m}
l 0=0(m)
0.4
0.4
0.3
µ2
µ2
0.2
0.2
0.1
0.1
0
0
100
100
4
α0 (Deg)
4
3
0
2
-100
1
2
α0 (Deg) -100
lb(m)
0
3
0
0.4
1
0
l b(m)
0.4
l 0=1(m)
l 0=1.5(m)
0.3
µ2
l 0=0(m)
0.3
0.3
µ2
0.2
0.1
0.2
0.1
0
0
100
4
3
0
α0 (Deg) -100
100
4
2
1
0
l b(m)
3
0
α0 (Deg)
µ2 = Av [ µ(x,y),∀ (x,y) ∈ W: µ (x,y)≠0 ]
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
2
-100
1
0
l b(m)
84
Manipulabilidade
Exemplo: Robô 1 = Robô 2 {l1 = l2 = 1 m}
0.4
0.4
l0=0(m)
0.3
µ3
0.2
µ3 0.2
0.1
0.1
0
0
100
100
4
4
3
0
α0 (Deg) -100
2
1
α0 (Deg)
lb(m)
0
3
0
0.4
l0=1(m)
µ3
0.1
0
0
100
l0=1.5(m)
4
100
4
3
0
2
1
0
lb(m)
Controlo de Robôs Manipuladores
3
0
α0 (Deg) -100
µ3 = Av [ µ(x,y),∀ (x,y) ∈ W ]
Nuno Miguel Fonseca Ferreira
l b(m)
0
0.2
0.1
-100
1
0.3
0.2
α0 (Deg)
2
-100
0.4
0.3
µ3
l 0=0.5(m)
0.3
2
1
0
lb(m)
85
Manipulabilidade
Exemplo: Robô 1 = Robô 2 {l1 = l2 = 1 m}
0.6
0.5
0.4
µ
1 0.3
0.2
0.1
α0=0
0
4
4
3
3
2
2
1
l 0(m)
0
1
0
lb(m)
0.4
0.5
0.3
α0=0
0.4
µ2 0.2
µ
0.1
α0=0
0.2
0.1
0
4
4
3
3
2
l0(m)
0.3
3
0
4
4
3
2
1
0
1
0
Nuno Miguel Fonseca Ferreira
3
2
l 0(m)
lb(m)
Controlo de Robôs Manipuladores
2
1
0
1
0
l b(m)
86
Manipulabilidade
Exemplo: Robô 1 = Robô 2 {l1 = l2 = 1 m}
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
87
Obrigado pela atenção, e bom
trabalho a todos.
Nuno Miguel Fonseca Ferreira
Controlo de Robôs Manipuladores
88
Download