Índice
1 Introdução
I
Fundamentação teórica
7
1.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2 O conceito de derivada e suas aplicações
2.1 Breve historial . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 A derivação . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 A tangente a uma curva num dos seus pontos. . . . . .
2.2.2 Derivada de uma função num ponto: definição e significado geométrico . . . . . . . . . . . . . . . . . . . .
2.2.3 Derivadas laterais: definição e interpretação geométrica
2.2.4 Derivada de uma função num ponto: significado cinemático . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Derivada de Carathéodory . . . . . . . . . . . . . . . . . . . .
2.4 Derivada num domínio . . . . . . . . . . . . . . . . . . . . . .
2.5 Derivabilidade e continuidade
. . . . . . . . . . . .
11
11
12
13
14
16
18
20
20
21
3 Função Derivada
23
3.1 Definição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 As regras de derivação . . . . . . . . . . . . . . . . . . . . . . 23
3.3 Derivadas de ordem superior . . . . . . . . . . . . . . . . . . . 31
4 Derivação de algumas funções
33
4.1 Funções Trigonométricas . . . . . . . . . . . . . . . . . . . . . 33
4.1.1 Derivada das funções trigonométricas directas . . . . . 33
4.1.2 Derivada das funções trigonométricas inversas . . . . . 36
1
2
ÍNDICE
4.2 Derivada da função exponencial . . . . . . . . . . . . . . . . . 39
4.3 Derivada da função logarítmica . . . . . . . . . . . . . . . . . 40
5 Diferencial de uma função
43
5.1 Definição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.2
Interpretação geométrica . . . . . . . . . . . . . . . . . . . . 44
5.3
Regras de diferenciação . . . . . . . . . . . . . . . . . . . . . 44
6 Aplicações das Derivadas
6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Teoremas fundamentais do Cálculo Diferencial . . . . . . . . .
6.2.1 Máximos e Mínimos relativos . . . . . . . . . . . . . .
47
47
47
47
7 Derivação Numérica
7.1 Introdução . . . . . . . . . . . . . . . . . . .
7.2 Derivadas de primeira ordem . . . . . . . . .
7.2.1 Diferenças finitas de primeira ordem
7.2.2 Diferenças finitas de segunda ordem .
7.3 Derivadas de segunda ordem . . . . . . . .
7.4 Diferenciação com splines . . . . . . . . . .
7.5 Influência dos erros de arredondamento . . .
7.6 Extrapolação de Richardson . . . . . . . . .
.
.
.
.
.
.
.
.
61
61
62
64
66
68
72
73
76
.
.
.
.
.
.
.
.
.
.
79
79
80
81
82
83
84
84
86
86
87
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8 Alguns aspectos da Didáctica da Matemática
8.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Processos do pensamento matemático . . . . . . . . . . . .
8.3 O método axiomático . . . . . . . . . . . . . . . . . . . . . .
8.4 O papel das definições . . . . . . . . . . . . . . . . . . . . .
8.5 O papel dos teoremas . . . . . . . . . . . . . . . . . . . . . .
8.6 Introdução à Didáctica da Análise e das Derivadas . . . . . .
8.6.1 O conceito de limite . . . . . . . . . . . . . . . . . .
8.6.2 A derivada . . . . . . . . . . . . . . . . . . . . . . . .
8.6.3 Modelação matemática . . . . . . . . . . . . . . . .
8.6.4 A modelação matemática e a resolução de problemas
8.6.5 Ilustrações de tratamentos didácticos de aplicação do
conceito de derivada . . . . . . . . . . . . . . . . . .
. 88
ÍNDICE
3
II Estudo do programa de Matemática do terceiro
ciclo
97
8.7 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
8.8 Níveis de desenvolvimento do domínio cognitivo segundo Devies100
8.9 Intuição e Lógica em Matemática . . . . . . . . . . . . . . . . 101
9 Uma análise do programa do Ensino Secundário do 3o ciclo
em Cabo Verde
103
9.1 Grelha de análise do programa oficial de Matemática do Ensino Secundário. . . . . . . . . . . . . . . . . . . . . . . . . . . 103
9.2 Conclusões e recomendações . . . . . . . . . . . . . . . . . . . 104
III
Algumas sugestões metodológicas
105
9.3 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
10 Sugestões Metodológicas
11 Conclusões
11.1 O que fizemos . . . . . . . . . . . . .
11.2 As facilidades e os constrangimentos
11.3 Ganhos conseguidos . . . . . . . . . .
11.4 Perspectivas de trabalho futuro . . .
109
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
111
111
112
112
112
4
ÍNDICE
CAPÍTULO 1
Introdução
O conceito de derivada tem grande importância pelas suas inúmeras aplicações na Matemática, na Física e nas outras ciências.
O estudo do conceito de derivada começou com Pierre de Fermat no
século XVII, foi reformulado por Isaac Newton e Gottfried Leibniz no século
XVIII, e formalizado em termos ainda hoje em vigor, por Augustin Cauchy e
Karl Weierstrass no século XIX. Contudo ainda hoje o conceito de derivada
constitui objecto de investigação e de estudo, desde o Ensino Secundário, por
parte daqueles que estudam ou ensinam a disciplina de Matemática.
Considerando a importância do Cálculo Diferencial na formação matemática
e para a continuação dos estudos que encaramos o desafio de trabalhar esse
tema considerado um instrumento cada vez mais indispensável pela aplicabilidade aos mais diversos campos da ciência. Acreditamos que com este
trabalho estamos a dar um modesto contributo para o ensino/aprendizagem
da Matemática e em particular para o ensino e a aprendizagem das derivadas.
Intitulado "As derivadas: potencialidades e ensino no terceiro ciclo", o
trabalho será desenvolvido tendo em vista os seguintes objectivos gerais:
- Apresentar uma abordagem teórica de suporte ao ensino das derivadas;
- Clarificar (especificar) as potencialidades das derivadas e das técnicas
de derivação na resolução de problemas matemáticos, físicos e outros;
- Caracterizar a abordagem proposta nos programas oficiais para o ensino
das derivadas no terceiro ciclo do Ensino Secundário em Cabo Verde;
- Apresentar sugestões metodológicas para o ensino das derivadas no terceiro ciclo do Ensino Secundário.
5
6CAPÍTULO 1. INTRODUÇÃO
Devido à complexidade do tema vimo-nos obrigados a estruturar o trabalho da seguinte forma:
Parte I - Fundamentação teórica, onde se apresenta uma revisão das bases
científicas dos conceitos de derivadas e suas aplicações. Apresentamos também bases teóricas da Didáctica da Matemática, em particular da Análise
Matemática;
Parte II - Estudo do programa de Matemática do terceiro ciclo, apresentando uma análise da abordagem proposta nos programas oficiais em vigor,
tendo como referência teórica os conceitos da Didáctica da Matemática.
Parte III- Algumas sugestões metodológicas para o ensino das Derivadas
no terceiro ciclo do Ensino Secundário: nesta parte contribuímos com sugestões metodológicas que possam ser utilizadas directamente pelos professores
durante a preparação e abordagem dos temas relacionados com a derivação
de funções reais de variável real, ou indirectamente através das ideias nelas
contidas.
Parte I
Fundamentação teórica
7
1.1. INTRODUÇÃO
1.1
9
Introdução
Nesta Parte I do trabalho serão revistos os conceitos teóricos que constituem
o sustentáculo da análise proposta na Parte II e sugestões metodológicas na
Parte III. Trata-se de rever o conceito de derivação, tentando, sem deixar
o nível elementar, ser tão exaustivos quanto possível num trabalho desta
natureza1 , em relação a conceitos e métodos para que o professor possa encontrar nela um texto auto-sustentado para tirar referências para o ensino,
tirar dúvidas ou ter suporte teórico para diversas metodologias de ensino.
Trata-se também de rever as noções fundamentais da Didáctica da Análise
Matemática, com especial enfoque ao estudo das derivadas, capítulo que tem
merecido, da parte dos investigadores em Didáctica, grande interesse devido a
potencialidade desse conteúdo para a modelação matemática, em particular.
1
Isto é, realizado como componente de uma formação académica, sujeito portanto a
restrições de tempo e meios.
10
CAPÍTULO 2
O conceito de derivada e suas
aplicações
2.1
Breve historial
Na História da Matemática a determinação da recta tangente a uma curva
num dos seus pontos foi um dos problemas que esteve na origem do Cálculo
Diferencial.
Foi no Século XVII que Pierre de Fermat, enquanto se dedicava ao estudo de algumas funções, se deu conta das limitações do conceito clássico de
recta tangente a uma curva quando definida como sendo aquela que encontrava a curva num único ponto. Para resolver ainda esse problema Fermat
considerou outro ponto Q sobre a curva. Considerou a recta P Q secante a
curva, que se aproximava duma recta t a que Fermat chamou a recta tangente
à curva no ponto P .
Ele notou que para certas funções1 , nos pontos onde a curva assumia
valores extremos, a tangente ao gráfico era uma recta horizontal, já que ao
comparar o valor assumido pela função num desses pontos P (x, f (x)) com
o valor assumido no outro ponto Q(x + ε, f(x + ε)), ε > 0, próximo de P ,
a diferença entre F (x + ε) e F (x), era muito pequena, quase nula, quando
comparada com o valor de ε, diferença das abcissas de Q e P . Assim, o
problema de determinar extremos e o problema de determinar tangentes a
curvas passaram a estar intimamente relacionados. Estas ideias constituíram
o embrião do conceito de Derivadas, e levou Pierre Simon de Laplace a
1
Contínuas.
11
12CAPÍTULO 2. O CONCEITO DE DERIVADA E SUAS APLICAÇÕES
considerar Fermat «o verdadeiro inventor do Cálculo Diferencial»2 . Embora
Fermat não tenha justificado rigorosamente o processo pelo qual calculou
várias derivadas - o conceito de limite não era ainda claramente definido - o
seu método é operacionalmente idêntico ao moderno processo de diferenciação. Assim, no século XVII, Gottfried Leibniz introduziu as notações dx e
dy e foi o primeiro a empregar a expressão Cálculo Diferencial. Pode se dizer
que os principais conceitos sobre Derivadas foram introduzidos por Isaac
Newton e Gottfried Leibniz, no século XVIII. São por isso conhecidos na
História da Matemática como os fundadores do Cálculo Diferencial3 .
Como se viu, as ideias estudadas antes por Fermat, estão fortemente relacionadas com a noção de recta tangente a uma curva plana, num dos seus
pontos. Foi apenas no século XIX que Augustin Louis Cauchy introduziu formalmente o conceito de derivada, libertando-o da sua dependência
geométrica.
2.2
A derivação
A determinação da recta tangente a uma curva num dos seus pontos foi,
como dissemos acima, um dos problemas que esteve na origem do Cálculo
Diferencial.
Uma ideia simples do que significa a recta tangente num ponto P de uma
circunferência, é uma recta que intersecta a circunferência, por exemplo, de
centro O em exactamente um ponto P e é perpendicular ao segmento OP ,
sendo O o centro da circunferência.
Para se chegar a uma definição de recta tangente ao gráfico de uma função
num ponto do mesmo, pensa-se que essa recta tangente é a recta que contém
o ponto e que "melhor aproxima" o gráfico de f numa vizinhança suficientemente pequena deste ponto. Assim, a recta tangente pode ser determinada
pelo seu coeficiente angular e pelo ponto de tangência. Nesta secção vamos
apresentar a definição ilustrada do que é recta tangente a uma curva para
depois apresentarmos o conceito da derivada de uma função num dos seus
2
www.somatematica.com.br/historia.php - 32k,"Origem do conceito de derivada de
uma função".
3
É apenas um caso entre vários outros na história da ciência, o que mostra claramente
que ninguém tem a paternidade absoluta das descobertas científicas. O próprio Newton
deixou essa ideia bem clara quando afirmou que só conseguiu enxergar tão longe porque
subiu ao ombro de gigantes.
2.2. A DERIVAÇÃO
13
pontos com, a devida representação geométrica.
2.2.1
A tangente a uma curva num dos seus pontos.
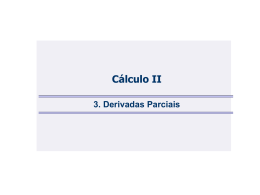
Seja f (x) uma função real de variável real e P (x0, y0 ) um ponto da curva
representativa da função. Vamos então ver como definir a recta t, tangente
à curva no ponto P0 .
Figura 2.1:
Figura 2.2:
Começamos por considerar um outro ponto P1 (x1, y1 ) distinto de P0 .
O declive da recta secante é
y1 − y0
m1 =
.
x1 − x0
Quando P1 se move sobre a curva e se aproxima de P0 as sucessivas secantes P0 Pn aproximam-se cada vez mais da posição da recta t.
14CAPÍTULO 2. O CONCEITO DE DERIVADA E SUAS APLICAÇÕES
Definição 2.1 A recta t, tangente à curva no ponto P (x0, y0 ) é a
recta que passa por P0 e tem por declive o limite dos declives das rectas
secantes definidas por P0 e por um ponto P (x, y) variável, quando P se
aproxima de P0 .
Ou seja,
m = lim
x→x0
ou
m = lim
x→x0
y − y0
.
x − x0
f (x) − f (x0 )
.
x − x0
A equação da recta t é
y − y0 = m (x − xo )
Exercício 2.1 Dada a função real de variável real, f (x) = x2 − 1, determinar uma equação da recta t tangente ao gráfico de f no ponto de abcissa
1.
Resolução: Como f (1) = 12 − 1 = 0, as coordenadas do ponto são
(1, 0) .
O declive da tangente é
(x − 1) (x + 1)
= lim (x + 1) = 2.
x→1
x→1
x−1
m = lim
E uma equação da tangente é y − 0 = 2(x − 1) ⇔ y = 2x − 2.
2.2.2
Derivada de uma função num ponto: definição e
significado geométrico
Na determinação da equação da tangente à curva foi necessário calcular
lim
x→x0
f (x) − f (x0 )
.
x − x0
(x0 )
A razão, f (x)−f
chamamos habitualmente, razão incremental da
x−x0
função entre x0 , dado que o denominador é o acréscimo ou incremento de
x a respeito de x0 e o numerador é o correspondente acréscimo da função em
relação à imagem de x0 . Reparemos que a razão incremental é uma função
de x, não está definida para x = x0 .
2.2. A DERIVAÇÃO
15
(x0 )
Definição 2.2 O valor, limx→x0 f (x)−f
se existir, denomina-se derivada
x−x0
df dy de f (x) no ponto x0 e representa-se por f (x0 ), Df (x0 ), dx
,
ou
dx x=x0
x=x0
df
(x0 ) .
dx
Nota 2.1 f (x0 ) = limx→x0
f no ponto de abcissa x0 .
f (x)−f (x0 )
x−x0
é o declive da tangente ao gráfico de
Fazendo x = x0 + h, vem x − x0 = h, temos
f (x0 ) = lim
h→0
f (x0 + h) − f (x0 )
.
h
Se fixarmos a função, não no ponto de abcissa x0 , mas no de abcissa x,
temos
f (x + h) − f (x)
f (x) = lim
.
h→0
h
Nota 2.2 Estamos a considerar h variável e x fixo (um valor qualquer do
domínio da função).
Geometricamente, a derivada de uma função num ponto de abcissa x0 é
igual ao declive da recta tangente ao gráfico da função no ponto (x0 , f (xo )) .
A cada valor de x corresponde no gráfico de f um ponto P , enquanto que
(x0 )
a x0 corresponde o ponto fixado P0 . A expressão, f (x)−f
dá-nos o declive
x−x0
da secante P0 P. Fazendo x tender para x0 , o Ponto P move-se ao longo da
curva, em direcção a P0 e as secantes correspondentes vão sendo definidas
por dois pontos cada vez mais próximos. O limite das posições das secantes
corresponde à posição da tangência. A derivada f (x0 ) identifica-se pois, com
o declive da recta tangente ao gráfico no ponto correspondente a x0 . O
seu valor dá-nos, por assim dizer, uma indicação do modo como a função se
comporta quanto ao seu acrescimento (ou decrescimento) numa vizinhança
desse ponto.
Exercício 2.2 Determinar o valor da derivada da função f (x) = 3x2 + 4
no ponto x0 .
Resolução:
(3x2 + 4) − (3x20 + 4)
3 (x2 − x20 )
= lim
x→x0
x→x0
x − x0
x − x0
= lim 3 (x + x0 ) = 6x0 .
f (x0 ) =
lim
x→x0
16CAPÍTULO 2. O CONCEITO DE DERIVADA E SUAS APLICAÇÕES
y
tangente
P0
0
x
P
x
x0
x
Figura 2.3:
A derivada de uma função num ponto tem um carácter local, isto é,
depende apenas do comportamento da função numa vizinhança (arbitrariamente pequena) do ponto.
Em consequência do teorema da unicidade do limite em R, tem-se:
Proposição 2.1 A derivada de uma função num ponto quando existe, é
única.
2.2.3
Derivadas laterais: definição e interpretação geométrica
(x)
Pode acontecer que não exista o lim h→0 f (x0 +h)−f
, mas existam os limites
h
(x)
laterais, à direita e à esquerda de x0 , isto é, exista lim h→0+ f (x0 +h)−f
h
(x)
e limh→0− f (x0 +h)−f
e serem portanto diferentes. Estes dois valores correh
spondem, naturalmente, aos declives das semitangentes em P0 à esquerda e à
direita, semitangentes estas que não estão no prolongamento uma da outra,
dado que os seus declives são diferentes. De facto, observe-se a figura 2.4:
os valores dos dois limites laterais, que se denominam derivada à esquerda e
derivada à direita, respectivamente, são −3 e 23 (porquê?).
(x)
(x)
Definição 2.3 Os valores lim h→0+ f (x0 +h)−f
e limh→0− f (x0 +h)−f
,
h
h
se existirem, denominam-se respectivamente derivada lateral direita de
f(x) no ponto x0 e derivada lateral esquerda de f (x) no ponto x0 e
2.2. A DERIVAÇÃO
17
Figura 2.4:
−
representam-se por f x+
0 e f x0 , respectivamente. É imediato concluir
que da existência de derivada num ponto P0 resulta as duas semitangentes
estarem no prolongamento uma da outra, o que implica existir recta tangente,
donde a seguinte
Proposição 2.2 A derivada, f (x0 ) existe sse existem e são iguais as derivadas
laterais no ponto x0, e nesse caso
f x+
f x−
f (x0 ) .
0 =
0 =
Exercício 2.3 Determinar, no ponto de abcissa 2, a derivada da função
definida por
⇐x<2
x
4
⇐ x=2
f (x) =
2
−x + 8 ⇐ x > 2
Resolução: Dada a maneira como a função é definida, começamos por
determinar as derivadas laterais . Em vez de
f x−
0 = lim
f (x) − f (x0 )
x − x0
(a)
f x+
0 = lim
f (x) − f (x0 )
x − x0
(b)
x→x0−
e
x→x0+
18CAPÍTULO 2. O CONCEITO DE DERIVADA E SUAS APLICAÇÕES
Podemos usar as fórmulas
f (x0 + h) − f (x0 )
f x−
0 = lim
h
h→0−
e
(a)
f (x0 + h) − f (x0 )
f x+
(b)
0 = lim+
h→0
h
Temos, então,
f 2−
f 2+
=
=
(2 + h)2 − 4
4 + 4h + h2 − 4
lim
= lim
=4
h
h
h→0−
h→0−
− (2 + h)2 + 8 − 4
−4 − 4h − h2 + 8 − 4
lim
= lim
= −4.
h
h
h→0+
h→0+
A função f não é derivável no ponto x0 = 2, pois sendo
lim−
x→2
não existe
f (x) − f (2)
=
x−2
lim
x→2
2.2.4
lim+
x→2
f (x) − f (2)
x−2
f (x) − f (2)
.
x−2
Derivada de uma função num ponto: significado
cinemático
Do estudo da cinemática sabe-se que a posição de um ponto material em
movimento sobre uma curva C conhecida, pode ser determinada, em cada
instante t, através da abcissa s do referido ponto, medida sobre a curva C.
A expressão que nos dá s em função de t, s = s(t) é a chamada equação
horária da curva.
Dado um instante t0 e sendo t um instante diferente de t0 , chama-se
velocidade escalar média do ponto entre os instantes t0 e t ao quociente
vm =
s(t) − s(t0 )
s
=
t − t0
t
e chama-se velocidade escalar do ponto no instante t0 ao limite
v(t0 ) = lim vm = lim
t→t0
t→t0
s(t) − s(t0 )
s
= lim
= s (t0 ).
t→0 t
t − t0
2.2. A DERIVAÇÃO
19
Figura 2.5:
Daqui podemos conclui que a derivada da função s = s(t) no ponto t = t0
é igual à velocidade escalar do móvel no instante t0 . Sabe-se ainda que a
velocidade v de um ponto material em movimento pode variar de instante
para instante. A equação que dá v em função do tempo t é v = v(t), chamada
equação da velocidade do ponto.
Sendo dado um instante t0 e um instante t diferente de t0 , chama-se
aceleração escalar média do ponto entre os instantes t0 e t ao quociente
am =
v(t) − v(t0 )
v
=
t − t0
t
e chama-se aceleração escalar do ponto no instante t0 ao limite
a(t0 ) = lim am = lim
t→t0
t→t0
v(t) − v(t0 )
v
= lim
= v (t0 ),
t→0 t
t − t0
isto é, a derivada da função v = v(t) no ponto t = t0 é igual à aceleração
escalar do móvel no ponto t0 .
Exercício 2.4 Um ponto percorre uma curva obedecendo à equação horária
s = t2 + t − 2. Calcular a sua velocidade no instante t0 = 2.
Resolução: Temos que a velocidade no instante t0 = 2 é igual à derivada
de s no instante t0 :
s(t) − s(2)
(t2 − t − 2) − (22 − 2 − 2)
= lim
=
t→2
t→2
t−2
t−2
t2 + t − 6
(t − 2)(t + 3)
= lim
= lim
= 5m/s
t→2
t→2
t−2
t−2
s (t0 ) = s (2) = lim
20CAPÍTULO 2. O CONCEITO DE DERIVADA E SUAS APLICAÇÕES
2.3
Derivada de Carathéodory
Vamos agora formular uma noção de derivada de uma função num ponto
que, embora diferente da de Cauchy, é equivalente à definição clássica que
foi apresentado no início. É a chamada derivada de Carathéodory, aparece
no seu último livro «Theory of Functions of a Complex Variable» de 1954.
Esta noção simplifica consideravelmente certas demonstrações dos teoremas
clássicos do Cálculo Diferencial.
Definição 2.4 Como na definição clássica, seja I um intervalo de R com
mais de um ponto. Diz se que f : I → R é diferenciável ou tem derivada
finita em a I, quando existir uma função φ : I → R contínua no ponto a
e tal que
f (x) − f (a) = φ (x) (x − a)
(1)
para qualquer xI.
É claro que se f é diferenciável neste sentido, a função φ (x) =
definida para x = a verifica
f (x)−f (a)
x−a
lim φ (x) = φ (a)
x→a
por ser contínua em a e, assim,
f (a) = φ (a)
existe. Mais ainda, a derivada de f em a é o número φ (a) , na formulação de
Carathéodory. Reciprocamente, se f tem derivada em a no sentido clássico, a
(a)
função φ (x) = f (x)−f
, sempre definida para x = a, tem limite em a e é porx−a
tanto prolongável por continuidade a este ponto verificando-se trivialmente
a equação (1).
2.4
Derivada num domínio
Uma função diz-se diferenciável num intervalo ]a, b[ quando admite derivada
finita em todos os pontos do intervalo. E diz-se diferenciável num intervalo [a, b] quando é diferenciável em ]a, b[ e diferenciável à esquerda de b e à
direita de a.
2.5. DERIVABILIDADE E CONTINUIDADE
Exercício 2.5 Sendo
21
2
⇐x<2
x
f (x) =
4
⇐x=2
2
−x + 8 ⇐ x > 2
Calcular a sua derivada.
Resolução: Podemos ver que no ponto 2 a função não tem derivada. É
fácil ver que para x0 < 2 é f (x0 ) = 2x0 e para x0 > 2 é f (x0 ) = −2x0 .
Assim, a função derivada f (x) é definida por
2x
⇐x<2
f (x) =
−2x
⇐x<2
Como se vê, nesse caso, Df = Df \ {2} .
2.5
Derivabilidade e continuidade
Uma consequência imediata da formulação de Carathéodory é o seguinte
teorema:
Teorema 2.1 Toda a função com derivada finita num dado ponto é contínua
nesse ponto.
Dem.: Vamos supor que a função f tem derivada finita no ponto de
abcissa x0
Então, como
f (x) − f (x0 ) =
será
lim [f (x) − f (x0 )]
x→x0
f (x) − f (x0 )
(x − xo ) ,
x − x0
f (x) − f (x0 )
limx→x0 (x − xo )
x→x0
x − x0
= f (x0 ) × 0 = 0.
=
lim
Assim,
lim [f (x) − f (x0 )] = 0 ⇔ lim
x→x0
x→x0
f (x) = f (x0 ) .
O que prova que f é contínua no ponto de abcissa x0 .
22CAPÍTULO 2. O CONCEITO DE DERIVADA E SUAS APLICAÇÕES
Nota 2.3 A recíproca deste teorema não é válida. Assim, uma função pode
ser contínua num ponto sem ser diferenciável nesse ponto.4 Notemos ainda
que a demonstração feita exige que f (x0 ) seja finita. Aliás em pontos de
descontinuidade a função pode ter derivada infinita.
4
Ex: A função f : R → R, f (x) = |x| é contínua no ponto de abcissa 0 mas não
diferenciável nesse ponto.
CAPÍTULO 3
Função Derivada
3.1
Definição
A toda a função diferenciável em todos os pontos de um domínio pode-se
associar uma nova função que a cada ponto do domínio em consideração faça
corresponder o valor da derivada da função dada. Esta nova função, definida
à custa da anterior, tem o nome de função derivada da primeira, de acordo
com a seguinte
Definição 3.1 Dada uma função f (x) , de domínio Df , chama-se função
derivada de f e representa-se por f (x) a função cujo o domínio, Df é
o conjunto de todos os pontos em que f (x) tem derivada finita (manifestadamente Df ⊂ Df ) e cujo os valores são as derivadas de f nos pontos
correspondentes. A função f (x), também chamada simplesmente derivada
de f (x), pode ser representada por
y´,
3.2
dy
, Df (x) , Df , f , ...
dx
As regras de derivação
Nem sempre devemos calcular as derivadas directamente a partir da definição,
usando o limite da razão incremental, pois este método, além de ser repetitivo
para certas funções como as lineares e polinomiais, só é prático para funções
muito particulares e simples. A seguir vamos estudar algumas regras de
derivação que nos permitirão encontrar derivada de funções de uma forma
mais fácil e rápida.
23
24
CAPÍTULO 3. FUNÇÃO DERIVADA
Teorema 3.1 (da Soma e do Produto): Sejam I um intervalo com mais
de um ponto, f, g : I → R duas funções diferenciáveis em aI e k R. Então
as funções kf, f + g e f g são diferenciáveis em a e tem-se:
a) (kf ) (a) = kf (a) ,
b) (f + g) (a) = f (a) + g (a) ,
c) (f g) (a) = f (a) g (a) + g (a) f (a) .
Dem.: a) Temos, por definição,
( kf ) (a) = lim
x→a
kf (x) − kf (a)
f (x) − f (a)
= k lim
= kf (a)
x→a
x−a
x−a
Fazendo u = f (x) ,vem (ku) = ku ou
D (ku) = kDu.
b) Temos
(f + g) (x) − (f + g) (a)
=
x→a
x−a
f (x) + g (x) − f (a) − g (a)
= lim
x→a
x−a
f (x) − f (a) g (x) − g (a)
= lim
+
=
x→a
x−a
x−a
f (x) − f (a)
g (x) − g (a)
+ lim
= f (a) + g (a) .
= lim
x→a
x→a
x−a
x−a
(f + g) (a) = lim
Simbolicamente, pondo u = f (x), e v = g (x) podemos afirmar que
D (u + v) = Du + Dv
em todos os pontos em que u e v admitem derivada finita.
A generalização desta fórmula é imediata para um número finito de funções
parcelas, isto é, temos
D(u + v + ... + w) = Du + Dv + ... + Dw
em todos os pontos em que u, v, ..., w têm derivada finita.
3.2. AS REGRAS DE DERIVAÇÃO
25
c) Nesta demonstração utilizamos a formulação de Carathéodory:
devido ao facto de f e g serem diferenciáveis em a existem φ e ψ funções
contínuas em a, tais que f (x) − f (a) = φ (x) (x − a) e g (x) − g (a) =
ψ (x) (x − a) para qualquer xI.
Assim,
f (x) g (x) = [f (a) + φ (x) (x − a)] [g (a) + ψ (x) (x − a)] =
= f (a) g (a) + f (a) ψ (x) (x − a) + φ (x) (x − a) g (a) +
φ (x) ψ (x) (x − a)2
ou
(f g) (x) − (fg) (a) = [f (a) ψ (x) + φ (x) g (a) + ψ (x) φ (x) (x − a)] (x − a) .
Se for notado que a função η (x) , que está dentro de parêntesis recto, é
contínua em a, fica provada a diferenciabilidade de fg. A sua derivada em a
pode-se calcular:
( fg) (a) = η (a) = f (a) ψ (a) + φ (a) g (a) = f (a) g (a) + f (a) g (a) ,
uma vez que na formulação de Carathéodory se tem
f (a) = φ (a) e g (a) = ψ (a)
.
Esta propriedade verifica-se para um número n de funções diferenciáveis
em ]a, b[:
(f1 f2 ...fn) (x) = f1 (x) f2 (x) ...fn (x) + f1 (x) f2 (x) ...fn (x) + ... + fn (x)
+f1 (x) f2 (x) ...fn (x)
Fazendo como anteriormente, u = f (x) e v = g (x) vem
D (uv) = vDu + uDv
ou ainda, noutra notação usada vem (uv) = u v + uv .
E analogamente para três ou mais funções diferenciáveis.
Em síntese apresenta-se a seguinte regra.
Regra: A derivada do produto dum número finito n de funções é sempre
igual à soma dos n produtos que se obtém, multiplicando a derivada de cada
uma das funções factores pelos factores restantes (nos pontos onde as funções
dadas tiverem derivada finita).
26
CAPÍTULO 3. FUNÇÃO DERIVADA
Teorema 3.2 Seja I um intervalo de R com mais de um ponto, tem-se que:
I) A derivada de uma função constante em qualquer ponto de I, é
zero;
II) A derivada de uma função afim, f : I → R definida por
f (x) = cx + b em qualquer ponto a I é uma constante;
III) Se f for um polinómio definido em I, isto é, f (x) = ao + a1 x +
a2 x2 + ... + an xn , então f é diferenciável em qualquer ponto de I
A função derivada de f é
f (x) = a1 + 2a2 x + ... + nan xn−1
IV) A derivada de f (x) = x é igual a 1.
Dem.: I) Seja f : I → R definida por f (x) = c, com c constante real.
Então
(a)
c−c
f (a) = limx→a f (x)−f
= limx→a x−a
= 0.
x−a
cx+d−(ca+d)
II) f (a) = limx→a
= limx→a c(x−a)
= c.
x−a
x−a
III) Trata-se de uma soma em que as parcelas têm a forma an xn,
portanto, sua derivada é nan xn−1 . Assim temos :
f (x) = ao + (a1 x) + a2 x2 + ... + (an xn ) = a1 + 2a2 x + ... + nan xn−1 .
IV) f (a) = limx→a
x−a
x−a
= 1.
Teorema 3.3 (Derivada de uma potência de expoente natural): Procurando a derivada de un sendo u = f (x) , n ∈ N\ {1} .
Por definição un = uuu...u(n factores). Segundo a regra anterior, tem-se
(un ) = u un−1 + u un−1 + ... + u un−1 (n parcelas)
= nu un−1 .
Regra: A derivada de uma potência de expoente natural é igual ao
produto do expoente por essa potência com o expoente diminuído de uma
unidade, a multiplicar ainda pela derivada da base (onde essa base tiver
derivada finita).
3.2. AS REGRAS DE DERIVAÇÃO
27
Teorema 3.4 (Derivada da inversa aritmética): Se I é um intervalo
de R com mais de um ponto, f : I → R é diferenciável em a I e f (a) = 0,
então a função f1 é diferenciável em a, e tem-se
1
f (a)
(a) = −
f
[f (a)]2
Nota 3.1 A inversa aritmética de uma função f , isto é, a função f1 ,é definida
1
por f1 (x) = f (x)
em todos os pontos x tais que f (x) = 0.
Dem.: Devido a f ser diferenciável em a existe φ contínua em a e tal
que f (x) − f (a) = φ (x) (x − a) para qualquer x I. Por outro lado, como f
é contínua em a e f (a) = 0, existe um intervalo aberto J de R tal que aJ
e f (x) = 0 em J ∩ I. Assim,
1
1
1
f (a) − f (x)
φ (x)
1
(x) − (a) =
−
=
=−
(x − a)
f
f
f (x) f (a)
f (x) f (a)
f (x) f (a)
φ(x)
para qualquer xJ ∩ I. Devido ao facto de a função η (x) = − f (x)f
ser
(a)
1
contínua em a, fica provado que f é diferenciável em a. A sua derivada em
a obtém- se facilmente:
1
φ (a)
f (a)
(a) = η (a) = −
=
−
.
f
[f (a)]2
[f (a)]2
Teorema 3.5 (Derivada do quociente): Se I é um intervalo de R com
mais de um ponto, f, g : I → R são diferenciáveis em a ∈ I e g (a) = 0,
então a função fg é diferenciável em a, e tem-se
f
f (a) g (a) − f (a) g (a)
(a) =
.
g
[g (a)]2
Dem.: Notando que fg = f g1 ,vem, aplicando o teorema3.1
f
1
1
(a) = f (a)
(a) + f (a)
(a)
g
g
g
e, aplicando o teorema anterior, resulta
f
1
f (a) g (a) − f (a) g (a)
g (a)
(a) = f (a)
+ f (a) −
=
.
g
g (a)
[g (a)]2
[g (a)]2
28
CAPÍTULO 3. FUNÇÃO DERIVADA
Teorema 3.6 (Derivada de uma função composta): Sejam I, J dois
intervalos de R com mais de um ponto, f : I → R e g : J → R duas funções
com f (I) ⊂ J. Então, se f é diferenciável em a, e tem-se g diferenciável
em b = f (a) , g ◦ f : I → R é diferenciável em a, e tem-se
(g ◦ f ) (a) = g (b) f (a) .
Dem.: Por ser f diferenciável em a existe φ contínua em a tal que
f (x) − f (a) = φ (x) (x − a) para qualquer x ∈ I. Analogamente, existe ψ
contínua em b e tal que g (x) − g (b) = ψ (x) (x − b) para qualquer x ∈ J.
Então,
(g ◦ f) (x) − (g ◦ f) (a) =
=
=
=
g [f (x)] − g (b) =
g (b) + ψ [f (x)] [f (x) − b] − g (b) =
ψ [f (x)] [f (x) − f (a)] =
ψ [f (x)] φ (x) (x − a) , ∀x ∈ I.
Devido à continuidade de ψ [f (x)] φ (x) em a, fica provado que g ◦ f é
diferenciável em a, e a derivada é dada por
(g ◦ f ) (a) = ψ [f (a)] φ (a) = ψ (b) φ (a) = g (b) f (a) .
Em particular, quando f : I → J e g : J → R são funções diferenciáveis,
a propriedade anterior permite escrever,
(g ◦ f ) (t) = g (f (t)) f (t) = (g ◦ f ) (t) f (t) , ∀t ∈ I
e assim, em termos de funções derivadas, temos:
(g ◦ f) = (g ◦ f ) f .
Nota 3.2 Quando se representa g e f por relações da forma y = g (x) e x =
f (t) , escreve-se por vezes a fórmula da derivação da função composta y =
dy dx
g [f (t)] na forma dy
= dx
, usando a notação de Leibniz para a derivada.
dt
dt
Os pontos onde as derivadas são calculadas estão subentendidos e as funções
estão identificadas com as variáveis dependentes. O menor rigor é assim
compensado por um agradável funcionamento aritmético dos símbolos. Esta
regra é também conhecida por regra da cadeia: y depende de x e x depende
de t e formam uma « cadeia de dependências».
3.2. AS REGRAS DE DERIVAÇÃO
29
Regra: A derivada duma função composta é sempre igual ao produto das
derivadas das funções componentes em pontos correspondentes (onde estas
tiverem derivadas).
Como
aplicação imediata da derivada de uma função composta, calcule√
n
mos D u, sendo u = f (x) .
√
Como y = n u com u = f (x) , tem-se: Dx y = Du yDx u =
1
1 n
u −1 u .
n
√
Exercício 3.1 Calcular a derivada de y = 5 u com u = x3 − 4x + 1.
Resolução:
3
5 u Dx x − 4x + 1 =
Dx y = Du yDx u = Du √
1 3
− 4 1 1 −1 2
=
u5
3x − 4 =
x − 4x + 1 5 3x2 − 4
5
5
Teorema 3.7 (Derivada de uma função inversa): Sejam I e J dois
intervalos de R com mais de um ponto, f : I → J uma bijecção diferenciável
em a ∈ I e f (a) = 0. Então f −1 : J → I é diferenciável em b = f (a) , e
tem-se
f −1 (b) =
f
1
(a)
Dem.: Uma vez que f é diferenciável em a, existe φ contínua em a e tal
que f (x) − f (a) = φ (x) (x − a) para qualquer x ∈ I. Note-se desde já que
φ (x) = 0 em todos os pontos de I, porque:
φ (x0 ) = 0 para x0 ∈ I
⇒ f (x0 ) − f (a) = 0 ⇔
⇔ f (x0 ) = f (a) ⇔ x0 = a
⇒ φ (xo ) = φ (a) ⇔ 0 = f (a) ,
o que é contra a hipótese. Pondo y = f (x) , pode-se escrever devido à
invertibilidade de f , que x = f −1 (y) e por substituição obtém-se:
f f −1 (y) − f (a) = φ f −1 (y) f −1 (y) − a , ∀y ∈ J,
ou
y − b = φ f −1 (y) f −1 (y) − f −1 (b)
30
CAPÍTULO 3. FUNÇÃO DERIVADA
ou ainda, uma vez que φ não se anula em I,
f −1 (y) − f −1 (b) =
1
φ (f −1
(y))
(y − b) , ∀y ∈ J.
Assim, fica provado que f −1 é diferenciável em b, porque a função
é contínua em b. O valor da derivada obtém-se facilmente:
−1 f
(b) =
1
φ (f −1
(b))
=
1
φ(f −1 (y))
1
1
= .
φ (a)
f (a)
Regra: A derivada da função inversa duma dada função invertível é
sempre igual ao inverso aritmético da derivada da função dada (em pontos
correspondentes).
Teorema 3.8 (Derivada da raíz): É uma consequência imediata
da an√
n
terior. Como aplicação, procurar a derivada de y = f (x) = x, sendo
n ∈ N. A expressão da função inversa x = f −1 (y) é x = y n definida para
todo o valor de y ou apenas para y ≥ 0, conforme n é ímpar ou par. Então
Dx y =
como y =
1
1
1
=
= n−1. .
n
Dy x
Dy y
ny
√
n
x, vem
Dx y =
1
1 n−1
1 1
√
= x− n = x n −1 .
n
n
n
n xn−1
√
1
Reparemos que a expressão agora deduzida para a derivada de n x = x n
generaliza, para o expoente n1 , a regra que tinha sido obtida para a potência
de expoente natural n.
Teorema 3.9 (Derivada de uma potência de expoente racional qualquer, positivo ou negativo): Seja y = uα , sendo u = f (x) e α um número
racional qualquer, positivo ou negativo. Considere-se, sucessivamente, que:
1. α é um número natural (α = n);
2. α é o inverso de um número natural (α = n1 );
3. α é o simétrico de um número natural (α = −n); 4. α é o simétrico do inverso de um número natural α = − n1 ;
5. Finalmente, seja α = m
com m ∈ Z {0} e n ∈ N.
n
3.3. DERIVADAS DE ORDEM SUPERIOR
31
Dem.:
1. Já vimos que, nestas condições, y = αuα−1 Du.
1
2. Também foi visto que y = n1 u n −1 Du = αuα−1 Du.
3. y = u−n = u1n .
y =
0 − nun−1 Du
= −nu−n−1 Du = αuα−1 Du.
u2n
4.
1
−n
y=u
=
1
u
1
n
1
; y =
0 − n1 u n −1 Du
u
2
n
1 1
= − u− n −1 Du = αuα−1 Du.
n
5.
1 m
1 m−1 1 m
y = u n = un
= y = m u n
D un
1 m−1 1 1
m m 1 1
= m un
u n −1 Du = u n − n + n −1 Du
n
n
m m −1
α−1
u n Du = αu Du.
=
n
Como vimos, a regra deduzida para potências de expoente natural pode
generalizar-se para um expoente racional qualquer, positivo ou negativo.
Temos pois ,
Duα = αuα−1 Du.
com α ∈ Q {0} em todos os pontos em que u = f (x) tenha derivada finita.
3.3
Derivadas de ordem superior
Vimos como é possível definir, a partir de uma função y = f (x) , uma nova
função f (x) que se denomina função derivada de f (x) .
Nada impede de determinar, do mesmo modo, a função derivada de f (x)
que se denomina segunda derivada (derivada de 2a ordem) de f (x) e se
representa por f (x) .
E assim sucessivamente.
Para a segunda derivada de y = f (x) usa-se ainda as seguintes notações
y , D2 (f) ,
d2 y d2 f
,
, ...
dx2 dx2
32
CAPÍTULO 3. FUNÇÃO DERIVADA
Derivando n vezes y = f (x) obtém-se a derivada de ordem n que se pode
representar por qualquer das notações
y (n) , f (n) (x) , Dn (f) ,
dn y dn f
,
, ...
dxn dxn
Exercício 3.2 Sendo y = x3 + 5x2 + 3 temos:
y
y y y =
=
=
=
3x2 + 10x + 3
6x + 10
6
0
CAPÍTULO 4
Derivação de algumas funções
4.1
Funções Trigonométricas
Nesta secção pretendemos apresentar a derivada das funções trigonométricas directas como o seno, o co-seno, a tangente e a cotagente, bem como a
derivada das funções trigonométricas inversa como a arcoseno, arco-coseno e
arcotangente .
4.1.1
Derivada das funções trigonométricas directas
Derivada da função f (x) = senx
Consideremos a função, f (x) = senx e determinemos o valor da sua derivada
no ponto x. Vem
2sen h2 cos x + h2
sen (x + h) − senx
= lim
D(senx) = lim
h→o
h→0
h
h
h
sen
h
= lim cos x +
lim h 2 = cos x × 1
h→0
2 h→0 2
Donde
D(senx) = cos x, ∀x ∈ R
(Recordemos que limx→o senx
= 1, senα−senβ = 2sen α−β
cos α+β
, limx→0 cos x + h2 =
x
2
2
cos x e que a função f (x) = cos x é contínua em R).
33
34
CAPÍTULO 4. DERIVAÇÃO DE ALGUMAS FUNÇÕES
Sendo u = f (x) , diferenciável em ]a, b[, e aplicando a regra da derivada
da função composta, vem
D (senu) = u cos u.
Exercício 4.1 Seja f (x) = sen4 (3x) , calcular a sua derivada.
Resolução: Trata-se da derivada de uma potência:
f (x) = 4sen3 (3x) [sen (3x)] = 4sen3 (3x) (3x) cos (3x) =
= 12sen3 (3x) cos (3x)
Derivada da função f (x) = cos x
Calculemos agora a derivada da função, f (x) = cos x
−2sen h2 sen x + h2
cos (x + h) − cos x
D(cos x) = lim
= lim
h→0
h→0
h
h
sen h2
h
lim h = −senx × 1
= lim −sen x +
h→0
h→0
2
2
Donde
D (cos x) = −senx, ∀x ∈ R
Sendo u = f (x) , diferenciável em ]a, b[, e aplicando a regra da derivada da
função composta, então f (u) = cosu é diferenciável em ]a, b[ e
D (cos u) = −u senu.
Exercício 4.2 Seja f (x) = cos (x2 + 3)+cos5 (2x) , calcular a sua derivada.
Resolução: Trata-se da derivada de uma soma:
f (x) = − x2 + 3 sen x2 + 3 + 5 cos4 (2x) [cos (2x)] =
= −2xsen x2 + 3 − 10 cos4 (2x) sen (2x)
4.1. FUNÇÕES TRIGONOMÉTRICAS
35
Derivada da função f (x) = tgx
A função f (x) = tgx é diferenciável no seu domínio, D = {x ∈ R : x =
π
+ kπ, k ∈ Z}
2
O cálculo da derivada de f (x) = tgx e f (x) = cot gx poderia ser feito,
como nos casos anteriores, a partir da definição, mas é mais cómodo recorrer
às regras de derivação já estudadas.
Assim sabendo que
u vu − uv =
,
v
v2
temos que
senx cos x (senx) − senx (cos x)
cos x
cos2 x
cos2 x + sen2 x
1
cos x cos x + senx.senx
=
=
=
2
2
cos x
cos x
cos2 x
D (tgx) =
=
Logo
D (tgx) =
ou
1
(com cos x = 0)
cos2 x
D (tgx) = 1 + tg 2 x
Sendo u = f (x) , diferenciável em ]a, b[ ⊂ D, então f (u) = tgu é diferenciável em ]a, b[ e
u
2
=
u
D (tgu) =
1
+
tg
u
cos2 u
√
Exercício 4.3 Seja f (x) = xtg (2x + 3) calcular a sua derivada.
Resolução: Trata-se da derivada de um produto:
√ √
f (x) =
x tg (2x + 3) + x [tg (2x + 3)] =
√
√
1
2
tg (2x + 3)
2 x
√
= √ tg (2x + 3) + x 2
=
+
cos (2x + 3)
cos2 (2x + 3)
2 x
2 x
Derivada da função f (x) = cot gx
A função f (x) = cot gx é diferenciável no seu domínio, D = {x ∈ R : x =
kπ, k ∈ Z}
36
CAPÍTULO 4. DERIVAÇÃO DE ALGUMAS FUNÇÕES
Analogamente podemos agora calcular a derivada de cotgx
cos x senx (cos x) − cos x (senx)
D (cot gx) =
=
senx
sen2 x
−sen2 x − cos2 x
−senxsenx − cos x cos x
=
=
sen2 x
sen2 x
1
= −
sen2 x
Então
1
(com senx = 0)
sen2 x
A função f (x) = cos1 x chama-se secante de x e designa-se por secx e a
1
função f (x) = senx
chama-se co-secante de x e designa-se por cosecx.
Podemos então dizer-se que
D (cot gx) = −
D (tgx) = sec2 x
ou
D (cot gx) = − cos ec2 x
Sendo u = f (x) , diferenciável em ]a, b[ ⊂ D, então f (u) = cot gu é
diferenciável em ]a, b[ e
D (cot gu) = −u 1 + cot g 2 u = −u cos ec2 u
Exercício 4.4 Seja f (x) = cotg π3 − 3x , calcular a sua derivada.
Resolução:
π
π
π
f´(x) = −
− 3x cos ec2
− 3x = 3 cos ec2
− 3x
3
3
3
4.1.2
Derivada das funções trigonométricas inversas
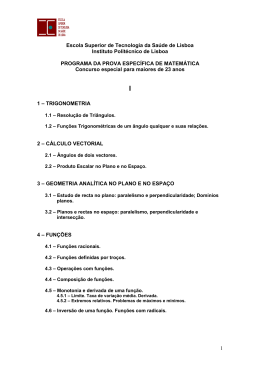
Derivada da função f (x) = arcsenx
Consideremos a função
π fπ(x)
= arcsenx definida no intervalo [−1, 1] com
valores no intervalo − 2 , 2 , cuja representação geométrica é recordada ao
lado.
Calculemos a sua derivada, recorrendo à relação existente entre as derivadas
de uma função e da sua inversa Dxy = D1y x .
4.1. FUNÇÕES TRIGONOMÉTRICAS
37
Figura 4.1:
Assim, sendo y = arcsenx, temos x = seny. Como Dy x = cos y, vem
Dy (arcsenx) =
1
1
1
=√
=√
.
2
cos y
1 − sen y
1 − x2
Como os valores não√nulos de cos y no intervalo considerado são positivos,
cos y é sempre igual a 1 − x2 .
Assim, é
1
D (arc senx) = √
1 − x2
para x = −1 e x = 1
Nota 4.1 : No ponto −1 a derivada lateral direita é +∞; no ponto 1 a
derivada lateral esquerda é +∞.
Sendo u = f (x) , diferenciável, então f (u) = arcsenu é diferenciável e
u
D (arc senu) = √
1 − u2
Exercício 4.5 Seja f (x) = sen (3x)+arcsen (2 cos x) , calcular a sua derivada.
Resolução: Trata-se da derivada de uma soma de funções:
2senx
f (x) = 3 cos (3x) − √
1 − 4 cos2 x
38
CAPÍTULO 4. DERIVAÇÃO DE ALGUMAS FUNÇÕES
Derivada da função f (x) = arc cos x
Calculemos agora a derivada de f (x) = arc cos x, de domínio [−1, 1] , com
valores em [0, π] .
Se y = arc cosx, então é x = cosy e Dy x = −seny. Como no intervalo
]0, π[ é seny > 0, tem-se
Dx (arccos x) =
Logo
1
1
1
1
= −√
.
=
= √
2
Dy x
−seny
− 1 − cos y
1 − x2
1
D (arccos x) = − √
1 − x2
para x = 1 e x = −1, temos neste caso, f (−1+ ) = −∞ e f (−1− ) = −∞.
Sendo u = f (x) , diferenciável em ]a, b[ ⊂ Df , então f (u) = arccos u é
diferenciável e
u
D (arccos u) = − √
1 − u2
Exercício 4.6 Seja f (x) = (arccos x)2 , calcular a sua derivada.
Resolução: Trata-se da derivada de uma potência:
f (x) = 2 arccos x (arccos x) =
−2 arccos x
√
1 − x2
Derivada da função f (x) = arctgx
Calculemos, finalmente,
de f (x) = arctgx, de domínio R, com
π a πderivada
valores no intervalo − 2 , + 2 . Se y = arctgx, então x = tgy e
Dy x =
1
= 1 + tg 2 y = 1 + x2 .
cos2 y
Logo
1
1 + x2
E, Sendo u = f (x) , então f (u) = arctgu é diferenciável e
D (arctgx) =
D (arctgu) =
u
1 + u2
4.2. DERIVADA DA FUNÇÃO EXPONENCIAL
Exercício 4.7 Seja f (x) =
2x+1
√
3
√1 arctg
3
2x+1
√
3
39
, calcular a sua derivada.
2
√
1
1
2
2
3
√
√
= .
f (x) =
2 =
2 =
(2x+1)2
3 1 + 2x+1
31+ 3
3 + (2x + 1)2
2x+1
√
√
3 1+
3
3
Derivada da função f (x) = arccot gx
A função, f (x) = arccot gx, é também diferenciável com valores no intervalo
]0, π[ .
−1
1
Sendo y = arccotgx ⇔ x = cot gy e Dx y = D1y x = 1+cot
= − 1+x
2
g2 y
Podemos dizer que
D (arccot gx) = −
1
1 + x2
D (arccot gu) = −
u
1 + u2
Exercício 4.8 Seja f (x) = x2 + arccot g (3x + 1) , calcular a sua derivada.
Resolução:
f (x) = 2x −
4.2
1
1
= 2x − 2
1 + (3x + 1) 2
9x + 6x + 2
Derivada da função exponencial
Comecemos por calcular a derivada da função exponencial de base e no ponto
x, isto é, da função f (x) = ex .
ex+h − ex
eh − 1
= ex lim
= ex .
h→0
h→0
h
h
D (ex ) = lim
recordando que,
eh − 1
= 1.
h→0
h
logo podemos então afirmar que
lim
D (ex ) =ex, ∀x ∈ R
40
CAPÍTULO 4. DERIVAÇÃO DE ALGUMAS FUNÇÕES
D (eu ) =eu u´
Quando a função exponencial não tiver a base e, o cálculo da derivada respectiva faz-se a partir desta. Para isso calculemos z de modo a que ax = ez .
Aplicando logaritmos de base e a esta igualdade. Vem
xloga = zloge
Como loge e = 1, temos z = x log a. Logo, a função f (x) = ax pode ser
representado por f (x) = ex log a . Torna-se agora imediato o cálculo da sua
derivada.
D (ax ) = D ex log a = ex log a D (x log a) = log a.ax
D (ax ) = log a.ax
D (au ) = au u´log a.
Exercício 4.9 D (e2x+3 ) = e2x+3 2 = 2e2x+3 .
2
2
2
Exercício 4.10 D ax +2x = ax +2x (2x + 2) log a = 2 log a (x + 1) ax +2x .
4.3
Derivada da função logarítmica
Calculemos agora a derivada da função logarítmica. Comecemos pela função
f (x) = loge x. Recorrendo à relação existente entre derivadas de funções
inversas uma da outra, Dx y = D1y x , teremos que, sendo y = loge x, é x = ey
e, ainda, Dy x = ey .
Assim D (loge x) = e1y = x1
Donde podemos afirmar-se que
D (loge x) =
1
, ∀x ∈ R+
x
Por questão de simplicidade omitimos a base dos logaritmos neperianos,
e, e podemos então escrever
D (log x) =
1
x
4.3. DERIVADA DA FUNÇÃO LOGARÍTMICA
41
Para uma base a diferente de e, temos, como imediata consequência da
definição de logarítmo:
x = aloga x = elog x .
Aplicando à última igualdade de logaritmos na base e, vem:
loga x log a = log x
donde
loga x =
log x
log a
Podemos agora escrever-se
D (loga x) =
1
.
x log a
Podemos notar que da regra da derivação da função composta resulta
imediatamente que
D u (x)
D (loga u (x)) =
.
u (x) log a
4
1
1
Exercício 4.11 D log5 x4 = 4 log
− x2 = − x log
.
5
5
x
x+1
D( x−1
)
2
x−1
2
Exercício 4.12 D log x+1
=
= − (x−1)
x+1
2 x+1 = − (x+1)(x−1) .
x−1
x−1
42
CAPÍTULO 4. DERIVAÇÃO DE ALGUMAS FUNÇÕES
CAPÍTULO 5
Diferencial de uma função
5.1
Definição
Figura 5.1:
Recordemos que o valor da derivada de uma função f num ponto de
abcissa x0 do seu domínio, se existir, é igual ao declive da tangente à curva
representativa da função no ponto P (x0 , f (x0 )) , isto é, f (x0 ) = tgα (ver
figura acima).
Dando a x0 um acréscimo dx, virá para a função um acréscimo que vai
ser designado por ∆y, isto é,
f (x0 + dx) = f (x0 ) + ∆y.
43
44
CAPÍTULO 5. DIFERENCIAL DE UMA FUNÇÃO
A recta de equação x = x0 + dx encontra a tangente à curva em P
num ponto Q. Qual será o acréscimo da ordenada de Q relativamente à
ordenada de P ? A esse acréscimo (que pode ser positivo, negativo ou nulo)
será chamado simplesmente acréscimo da ordenada da tangente e vai ser
representado por dy.
Da figura é imediato concluir que dy = f (x0 ) dx. É este valor que se
denomina diferencial da função f no ponto de abcissa x0 para o acréscimo
dx da variável independente. Assim
Definição 5.1 Denomina-se diferencial de uma função f no ponto de
abcissa x para o acréscimo dx da variável independente o valor
dy = f (x0 ) dx.
Em geral escreve-se na forma df = f (x) dx, onde se trata do diferencial
da função relativamente ao ponto x e ao acréscimo dx.
df
É importante observar que f (x) = dx
, isto é, o quociente dos diferenciais
da variável dependente pelo da variável independente.
5.2
Interpretação geométrica
O significado geométrico do diferencial de uma função f num ponto x0 do
seu domínio para o acréscimo dx da variável independente é, como foi visto
o acréscimo da ordenada da tangente à curva representativa de f no ponto
(x0 , f (x0 )) para esse acréscimo dx (ver figura).
É imediato concluir, até da própria figura, que em geral, é ∆y = dy. No
entanto, para valores muito pequenos de dx o erro cometido pela substituição
∆y por dy pode ser desprezado, o que permite simplificações importantes no
cálculo de valores de certas funções.
5.3
Regras de diferenciação
Dado que o conceito de diferencial se baseia no de derivada, as regras de
diferenciação são consequências quase imediatas das regras de derivação. No
entanto vamos apenas enunciá-las:
I. O diferencial da soma de duas funções diferenciáveis é igual à soma das
duas diferenciais dessas funções, isto é,
d (f + g) = df + dg
5.3.
REGRAS DE DIFERENCIAÇÃO
45
como consequência dessa propriedade tem-se mais geralmente
d (f1 + f2 + ... + fk ) = df1 + df2 + ... + dfk , k ∈ N.
II. O diferencial do produto de duas funções diferenciáveis f e g é igual
à soma dos produtos de cada uma das funções pelo diferencial da outra, isto
é,
d (f g) = gdf + fdg
III. Se f é função diferenciável então
d (f n ) = nf n−1 df
IV. Se f e g são funções diferenciáveis então
f
gdf − fdg
d
=
g
g2
V. Considerando agora as funções diferenciáveis f : x → f (x) e g :
f (x) → g (f (x)) .Tem-se
d (g ◦ f) (x) = (g .f ) dx = g (f dx) = g dg
e podemos então afirmar-se que
d [(g ◦ f ) (x)] = (g ◦ f ) dx = g dg,
isto é, para calcular d [(g ◦ f ) (x)] tanto faz multiplicar (g ◦ f ) dx por dx
como multiplicar g (f) por dg e depois substituir dg por g (x) dx.
A esta propriedade chama-se por vezes, princípio da invariâcia do
diferencial.
Vejamos alguns exemplos:
Exercício 5.1 Com f (x) = cos 2x e g (x) = x3 − 1, calcular d (f + g) e
d (f g) .
Resolução:
d (f + g) = −2sen2xdx + 3x2 dx = −2sen2x + 3x2 dx
d (f g) = x3 − 1 (−2sen2x) dx + cos 2x × 3x2 dx
= −2 x3 − 1 sen2x + 3x2 cos 2x dx.
46
CAPÍTULO 5. DIFERENCIAL DE UMA FUNÇÃO
3
2
Exercício 5.2 d (6x2 − ex ) = 3 (6x2 − ex ) (12x − ex) dx.
Também se podia fazer, com g = 6x3 − ex , d (g 3 ) = 3g 2 dg, e como se tem
dg = (12x − ex ) dx vem, substituindo na expressão anterior
2
d g 3 = 3g 2 (12x − ex ) dx = 3 6x2 − ex (12x − ex) dx.
Exercício 5.3 Calcular o valor do diferencial da função f (x) =
ponto x = 2.
Resolução:
2
(x + 1) − 2x2
3
dx = − dx.
df =
2
2
25
(x + 1)
x=2
x
x2 +1
no
CAPÍTULO 6
Aplicações das Derivadas
6.1
Introdução
A derivação, como vimos acima, teve sua origem em problemas concretos.
Neste capítulo vamos rever algumas aplicações da derivação a problemas
concretos diversos, da Matemática e de outros ramos das ciências.
Na primeira secção fazemos a preparação teórica para as aplicações, revendo
alguns teoremas clássicos importantes sobre extremos de uma função.
Vimos que a partir da derivada de uma função, muitas conclusões podem
ser tiradas sobre a variação de uma função e, portanto, sobre seu gráfico.
Começamos por esclarecer os conceitos de máximos e de mínimos de uma
função como uma das mais importantes aplicações da análise infinitesimal.
De seguida será apresentado os teoremas fundamentais do Cálculo Diferencial.
Em todo o capítulo, sempre que se refere a um intervalo, entendemos que
o intervalo tem mais do que um ponto, ou seja, que tem uma infinidade de
pontos.
6.2
6.2.1
Teoremas fundamentais do Cálculo Diferencial
Máximos e Mínimos relativos
Seja X uma parte não vazia de R. Diz-se que f : X → R tem um máximo
local ou relativo no ponto a, quando existe > 0 tal que, para qualquer
47
48
CAPÍTULO 6. APLICAÇÕES DAS DERIVADAS
x ∈ ]a − ε, a + ε[ ∩ X, se tem f (x) ≤ f (a) .
Analogamente, f tem um mínimo local ou relativo no ponto
a, quando existe ε > o tal que para qualquer x ∈ ]a − ε, a + ε[ ∩ X se tem
f (x) ≥ f (a) . Dizemos também que f tem um extremo local ou relativo
no ponto a, quando f tiver um máximo local ou um mínimo local no ponto
a.
Figura 6.1:
Na figura acima, f tem máximos locais nos pontos a1 , a2 , a3 e tem mínimos
locais nos pontos a1 , a2 , a3 .
Um resultado importante para a pesquisa de extremos locais de uma
função é o seguinte:
Teorema 6.1 ( de Fermat): Se I é um intervalo de R com mais de um
ponto, f : I → R é diferenciável no ponto a interior a I e f tem um extremo
local em a, então f (a) = 0.
Dem.: Supomos que f tem um máximo local em a. Então existe ε > 0
tal que f (x) ≤ f (a) em ]a − ε, a + ε[ , devido ao ponto a ser interior a I.
Como f é diferenciável em a, existe φ contínua em a tal que f (x) − f (a) =
φ (x) (x − a) para qualquer x ∈ ]a − ε, a + ε[ ,devido a f (x) − f (a) ≤ 0 em
]a − ε, a + ε[ ,tem-se φ (x) ≤ 0 em ]a, a + ε[ e φ (x) ≥ 0 em ]a − ε, a[ .
Assim, limx→a+ φ (x) ≤ 0 e limx→a− φ (x) ≥ 0 o que significa, devido à
continuidade de φ em a, que φ (a) ≤ 0 e φ (a) ≥ 0, isto é, φ (a) = 0, ou seja,
f (a) = 0.
6.2. TEOREMAS FUNDAMENTAIS DO CÁLCULO DIFERENCIAL 49
A demonstração é semelhante quando f tem um mínimo local em a.
O recíproco deste teorema não é verdadeiro, isto é, existem funções com
derivada nula num ponto não tendo extremo local nesse ponto.
Com efeito a função f : R → R definida por f (x) = x3 é estritamente
crescente não tendo portanto nenhum extremo local. Todavia, f (0) = 0.
Teorema 6.2 (de Rolle): Sejam a < b, f contínua em [a, b] e diferenciável em ]a, b[ . Então, se f (a) = f (b) , existe c ∈ ]a, b[ tal que f (c) =
0.
Dem.: Como f é contínua no conjunto limitado e fechado [a, b] , pelo teorema de Weierstrass, f tem máximo e mínimo neste conjunto. Se o máximo e
o mínimo são atingidos nas extremidades, como f (a) = f (b) , f é constante
em [a, b] e tem-se f (c) = 0 para qualquer c ∈ ]a, b[ . Se não, ou o máximo ou
o mínimo é atingido em c ∈ ]a, b[ e pelo teorema de Fermat, f (c) = 0.
Nas condições da hipótese do teorema de Rolle a existência de c ∈ ]a, b[
tal que f (c) = 0 significa que a tangente ao gráfico de f no ponto (c, f (c))
é horizontal.
Figura 6.2:
Neste caso até existem dois pontos c1 e c2 em ]a, b[ que anulam a derivada.
•Interpretação física: Se f verificar as condições do teorema de Rolle,
a e b forem dois instantes distintos no tempo e f (t) for a posição em cada
instante t de um ponto que se move no eixo real, podemos concluir que, se
o ponto ocupou a mesma posição (f (a) = f (b)) em dois instantes distintos
50
CAPÍTULO 6. APLICAÇÕES DAS DERIVADAS
no tempo, houve um instante onde teve uma paragem (f (c) = 0) significa
velocidade nula no instante c ).
Corolários do teorema de Rolle
I. Entre dois zeros duma função diferenciável num intervalo há, pelo
menos, um zero da derivada f .
II . Dada uma função f : I → R diferenciável, não pode haver mais que
um zero de f, entre dois zeros consecutivos de f .
Com efeito, se a e b forem dois zeros consecutivos de f e existirem α, β
tais que a < α < β < b e f (α) = f (β) = 0 pelo teorema de Rolle existia
c ∈ ]α, β[ tal que f (c) = 0 o que contraria a hipótese de a e b serem zeros
consecutivos de f .
III. De igual modo se mostra que não pode haver mais que um zero de f
maior que todos os zeros de f .
Exercício 6.1 Localizar os zeros da função f regular em R, sabendo que 1, 2
e 3 são os zeros de f´ e que f (−3) = −6, f (1) = 1, f (2) = 3 e f (3) = −4.
Resolução: À esquerda de 1, a função f só pode ter um zero (corolário
III do teorema de Rolle); esse zero existe e pertence a ]−3, 1[ porque f (−3)
e f (1) têm sinais contrários (teorema de Bolzano).
Em ]1, 2[ pode haver no máximo um zero (corolário II do teorema de
Rolle).
Em ]2, 3[ há um e só um zero: não pode haver mais de um (corolário II)
nem menos de um (teorema de Bolzano).
À direita de 3 só pode haver um zero de f (corolário III).
Teorema 6.3 (do valor médio de Lagrange): Sendo a < b, f contínua
e diferenciável em [a, b] existe, pelo menos, um ponto c de ]a, b[ tal que
Dem.: Fazendo
f (b) − f (a)
= f (c)
b−a
(1)
f (b) − f (a)
= λ.
b−a
(2)
temos de provar que existe c ∈ ]a, b[ tal que f (c) − λ = 0 ou, o que é o
mesmo, que a função g (x) = f (x) − λx (obviamente contínua e diferenciável
em [a, b]) tem, pelo menos, um zero em ]a, b[ . Ora, para esta função tem-se
g (a) = g (b) . (Atenda ao valor de λ dado por (2)).
6.2. TEOREMAS FUNDAMENTAIS DO CÁLCULO DIFERENCIAL 51
Aplicando o teorema de Rolle à função g (x) , fica garantida a existência
de, pelo menos, um c de ]a, b[ tal que g (c) = 0, ou seja, f (c) = λ.
Atendendo ao valor de λ, tem-se, finalmente, como se pretendia provar,
f (b) − f (a)
= f (c) .
b−a
Uma interpretação sugestiva do teorema:
Se um indivíduo faz um percurso em automóvel no intervalo de tempo
[a, b] e se f (x) é a lei do movimento, há um instante em que o velocímetro
regista a velocidade média
f (b) − f (a)
.
b−a
Observações
1.a - Se em (1) for f (b) = f (a) tem-se f (c) = 0 com c ∈ ]a, b[ , como se
afirma no teorema de Rolle.
2.a - Embora f possa admitir derivada infinita em algum ponto de ]a, b[ ,
f (c) é finita pois, por hipótese, b − a = 0.
3.a - De (1) vem f (b) − f (a) = (b − a) f (c) . Esta fórmula permite,
quando |f (x)| tem um majorante M em ]a, b[ , determinar pela desigualdade
|f (b) − f (a)| ≤ |b − a| M
um majorante do acréscimo finito f (b)−f (a) correspondente ao acréscimo
finito b − a.
• Interpretação geométrica do teorema do valor médio de Lagrange
(a)
Geometricamente, a existência de c ∈ ]a, b[ tal que f (c) = f (b)−f
sigb−a
nifica a existência de um ponto (c, f (c)) no gráfico de f onde a tangente é
paralela à recta secante definida pelos pontos A = (a, f (a)) e B = (b, f (b)),
uma vez que os declives de quaisquer destas rectas são iguais.
•Interpretação física do teorema do valor médio de Lagrange
Se f verificar as condições do teorema de Lagrange, a e b forem dois
instantes distintos no tempo e f (t) for a posição em cada instante t de um
ponto que se move no eixo real, então pode-se concluir que existe um instante
(a)
c onde a velocidade instantânea f (c) iguala a velocidade média f (b)−f
b−a
entre os referidos instantes. Por este facto, alguns autores chamam também
ao teorema de Lagrange teorema do valor médio do Cálculo Diferencial.
52
CAPÍTULO 6. APLICAÇÕES DAS DERIVADAS
Figura 6.3:
Corolários do teorema de Lagrange
Do teorema de Lagrange conclui-se que se f for diferenciável num intervalo I, tem-se para dois pontos distintos de I
f (x) − f (y) = (x − y) f (µ)
(A)
com µ compreendido entre x e y. Repare-se que f (µ) é finito.
Da fórmula (A) resultam os seguintes corolários:
Corolário I: Se f (x) = 0, ∀x ∈ I, f é constante em I.
Corolário II: Se f (x) ≥ 0, ∀x ∈ I (resp. f (x) ≤ 0, ∀x ∈ I) , f é crescente (resp. decrescente) em I.
Corolário III: Se f (x) > 0, ∀x ∈ I (resp. f (x) < 0, ∀x ∈ I), f é
estritamente crescente (resp. decrescente) em I.
Exercício 6.2 Determinar os pontos da parábola y = x2 compreendidos entre A (1, 1) e B (5, 25), em que a tangente é paralela à corda AB.
Resolução: De y´= 2x vem 2c = 6 ⇔ c = 3.
Para c = 3 é y (c) = 9.
Há um único ponto: (3, 9) .
Teorema 6.4 (do valor médio de Cauchy): Sejam a < b, f e g contínuas em [a, b] e diferenciáveis em ]a, b[ . Se g (x) = 0, ∀x ∈ ]a, b[, existe
pelo menos um c de ]a, b[ tal que
f (c)
f (b) − f (a)
= .
g (b) − g (a)
g (c)
(1)
6.2. TEOREMAS FUNDAMENTAIS DO CÁLCULO DIFERENCIAL 53
Nota 6.1 : Não se pode ter neste teorema g (a) = g (b) porque, se assim
fosse, pelo teorema de Rolle existia x ∈ ]a, b[ tal que g (x) = 0, o que contraria
a hipótese g (x) = 0 em ]a, b[ . Note-se também que o teorema de Lagrange
pode obter-se deste fazendo g (x) = x.
(b)−f (a)
Dem.: Aplicando o teorema de Rolle à função h (x) = f (x) − fg(b)−g(a)
g (x)
em [a, b] , fica demonstrado o teorema de Cauchy.
Observações
1.a - Se g (x) = x, temos g (a) = a, g (b) = b e g (c) = 1, e então (1)
traduz o teorema do valor médio de Lagrange.
2.a - Não é necessário impôr expressamente no enunciado a restrição g (b)−
g (a) = 0, pois se fosse g (b) = g (a) , g anular-se-ia num ponto de ]a, b[
(Teorema de Rolle), ao contrário do que se supõe na hipótese.
3.a - O teorema de Cauchy é ainda válido nos dois seguintes casos:
a) Se f e g são contínuas em [a, b] , g é diferenciável em ]a, b[ , g (x) = 0
nos pontos de ]a, b[ e f tem derivada nos pontos de ]a, b[ .
b) Se f e g são contínuas em [a, b] , têm derivada nos pontos de ]a, b[ ,
g (x) = 0, ∀x ∈ ]a, b[ e f (x) e g (x) não são conjuntamente infinitas em
nenhum ponto de ]a, b[ .
A denominação do teorema do valor médio deve-se ao facto de se poder
escrever a igualdade da tese na forma
f (b)−f (a)
b−a
g(b)−g(a)
b−a
=
f (c)
.
g (c)
•Interpretação física
Interpretando f e g como dois movimentos independentes na recta real
e [a, b] como um intervalo de tempo, existe um instante c ∈ ]a, b[ onde o
quociente das velocidades instantâneas iguala o quociente das velocidades
médias no intervalo [a, b] .
Exercício 6.3 Verificar a validade do teorema de Cauchy e determinar os
valores intermédios para:
a) f (x) = x2 + 2 e g (x) = x3 − 1 em
[1, 2] .
b) f (x) = senx e g (x) = cosx em 0, π2 .
Resolução: a) As funções f e g são diferenciáveis e têm derivada finita
em cada ponto do intervalo.
Temos f´(x) = 2x
g´(x) = 3x2
54
CAPÍTULO 6. APLICAÇÕES DAS DERIVADAS
f (1) = 3; f (2) = 6; g (1) = 0; g (2) = 7
f (b) − f (a)
g (b) − g (a)
f (c)
f (2) − f (1)
2c
⇔
= 2 ⇔
g (c)
g (2) − g (1)
3c
6−3
2
3
2
14
⇔
=
⇔ =
⇔ 9c = 14 ⇔ c = .
7−0
3c
7
3c
9
=
O único valor intermédio é 14
.
9
b) As funções f e g são diferenciáveis e têm derivada finita
em cada ponto do intervalo.
temos
f´(x) = cos x e g´(x) = −senx
π π f (0) = 0; f
= 1; g (0) = 1; g
=0
2
2
f π2 − f (0)
g π2 − g (0)
cos c
1−0
cos c
⇔
=
⇔
−senc
0−1
−senc
1
cos c
⇔
=
⇔ −senc = − cos c ⇔
−1
−senc
π
⇔ senc = cos c ⇔ c = .
4
=
O único valor intermédio é
π
.
4
• Do teorema de Cauchy deduz-se uma regra muito útil para o cálculo
de limites – a Regra de Cauchy.
Teorema 6.5 (Regra de Cauchy): Supondo que f e g são diferenciáveis
num intervalo aberto I, que a é um dos extremos de I e que g (x) = 0, ∀x ∈ I.
Se quando x tende para a, f (x) e g (x) tendem para 0 ou g (x) tende para
(x)
(x)
+∞ ou − ∞ e existe limx→a fg (x)
, então existe limx→a fg(x)
e tem-se
f (x)
f (x)
= lim .
x→a g (x)
x→a g (x)
lim
Nota 6.2 Como se vê, a utilização desta regra é possível nos dois casos
distintos:
6.2. TEOREMAS FUNDAMENTAIS DO CÁLCULO DIFERENCIAL 55
1. Caso f (x) e g (x) tendererem simultaneamente para 0. (indeterminação do tipo 00 ).
2. Caso g (x) tender para +∞ ou para −∞ nada se exigindo, neste caso,
a respeito do limite de f (x) .
Dem:. Vamos fazer a demonstração somente para o caso em que limx→a f (x) =
limx→a g (x) = 0 e supondo que a é o ínfimo de I.
Sendo a = inf.I, os limites referidos no enunciado são limites à direita.
•De início suponhamos a finito. Consideremos:
f (x) ⇐ x = a
F (x) =
0
⇐x=a
g (x) ⇐ x = a
G (x) =
0
⇐x=a
Sendo x um elemento qualquer de I, podemos aplicar o teorema de
Cauchy a F e a G em [a, x] , pois F e G são contínuas em [a, x], diferenciáveis
em ]a, x[ e G (x) = 0 nos pontos de ]a, x[ .
Aplicando o teorema de Cauchy, tem-se:
F (x)
F (c)
= com a < c < x
G (x)
G (c)
porque F (a) = G (a) = 0.
Quando x → a, o mesmo acontece com c, e daí
F (x)
F (c)
F ‘ (x)
= lim = lim
x→a G (x)
c→a G (C)
x→a G‘ (x)
lim
e ainda
f (x)
f (x)
= lim x→a g (x)
x→a g (x)
lim
porque em ]a, x]
f (x) F (x)
f (x)
F (x)
=
∧ = G (x)
g (x) G (x)
g (x)
e o limite duma função num ponto não depende do valor da função nesse
ponto. De resto, repare-se, FG não está definida em a.
(x)
• Suponhamos agora limx→−∞ fg (x)
= l com limx→−∞ f (x) = limx→−∞ g (x) =
0. (1)
56
CAPÍTULO 6. APLICAÇÕES DAS DERIVADAS
Seja f 1t = F (t) e g( 1t ) = G (t) .
(x)
(t)
Então, para x = 1t , tem-se fg(x)
= FG(t)
e x → −∞ ⇔ t → 0− ,
Quando t →
e
(t)
0− , FG(t)
assume a forma
0
0
(2)
devido a (2) e (1) ,
‘(t)
Consideremos o quociente FG‘(t)
,
1
1
Como F (t) = f t − t2 e G (t) = g 1t − t12 , vem
f 1t
F (t)
= 1
G (t)
g t
f (x)
F´(t)
= G (t)
g (x)
‘(x)
por ser x = 1t . Então, de limx→−∞ fg‘(x)
= l, conclui-se ser limt→0− FG (t)
= l.
(t)
Da última
igualdade
conclui-se,
atendendo
a
que
0
é
finito,
que
também
F (t)
f (x)
limt→0− G
(t) = l. O que significa, atendendo a (2) que também limx→−∞ g (x) =
l, como pretendíamos demonstrar.
Observações
1a -Se, ao aplicar a regra de Cauchy, se
verifica que é indeterminado o
(x)
(x)
segundo membro de limx→a fg(x)
= limx→a fg (x)
pode utilizar-se, novamente, a
regra de Cauchy desde que f (x) e g (x) satisfaçam as hipóteses da regra.
(x)
(x)
2a - Pode fg (x)
não ter limite no ponto a, mas entretanto existir limx→a fg(x)
.
x
É o que se verifica com limx→+∞ x−cos
.
x
O quociente 1 + senx das derivadas dos termos não tem limite quando
x → +∞, pois, por exemplo,
π
→ 1
sen 2nπ +
2
π
1
→
.
sen 2nπ +
6
2
x
Mas limx→+∞ x−cos
=
lim
1−
x→+∞
x
√
cos x
x
= 1 porque 0 ≤ cosx x ≤
1
|x|
x
Exercício 6.4 Calcular limx→0 log(x+1)
.
Resolução: Se for feita as substituições pode se verificar que se trata de
uma indeterminação do tipo 00 .
O limite em causa é o limite à direita, pois o domínio da função é ]0, +∞[ .
Os termos da fracção são diferenciáveis em R+ , a derivada do denominador
não se anula.
6.2. TEOREMAS FUNDAMENTAIS DO CÁLCULO DIFERENCIAL 57
Aplicando a regra de Cauchy temos
√
x
lim+
= lim+
x→0 log (x + 1)
x→0
1
√
2 x
1
x+1
= +∞.
Além da Regra de Cauchy há uma outra regra – a Regra de L´Hopital–
aplicável somente às indeterminações do tipo 00 .
Teorema 6.6 (Regra de L’Hopital): Sejam I um intervalo de R com mais
de um ponto, f, g : I → R duas funções diferenciáveis num ponto a ∈ I com
g (a) = 0 e g (x) = 0 em I {a} . Então, se f (a) = g (a) = 0 tem-se
f (x)
f (a)
= x→a g (x)
g (a)
lim
Dem.: Temos
f (x) − f (a)
f (x)
=
=
g (x)
g (x) − g (a)
f (x)−f (a)
x−a
,
g(x)−g(a)
x−a
e, passando ao limite quando x → a, concluímos que limx→a
f (x)
g(x)
=
f (a)
.
g (a)
Nota 6.3 a) A regra continua válida, como se vê facilmente na demonstração, mesmo que g (a) = 0, desde que f (a) = 0, e o resultado é infinito.
k
b) Convencionando ∞
=0e ∞
= ∞ para k ∈ R, a regra continua válida
k
desde que uma das derivadas, mas não ambas, seja infinita.
x
x
.
Exercício 6.5 Calcular limx→0 a −b
x
Resolução: Trata-se de uma indeterminação do tipo 00
Pode ser resolvido por qualquer das regras.
Aplicando a regra L´Hospital, temos
x
x
ax − bx
(a − bx )
a log a − bx log b
a
limx→0
=
=
= log a−log b = log .
x
1
b
(x)
x=0
x=0
Teorema 6.7 ( de Darboux): Se a, b ∈ R, a < b e f é diferenciável em
[a, b], então para qualquer γ no intervalo fechado de extremos f (a) e f (b) ,
existe c ∈ [a, b] tal que f (c) = γ.
58
CAPÍTULO 6. APLICAÇÕES DAS DERIVADAS
Observação: Devemos notar que a função derivada de uma função diferenciável pode não ser contínua. No caso de f ser contínua, este teorema não
é mais que o teorema de Bolzano aplicado à função derivada f no intervalo
[a, b] .
Dem.: Se γ = f (a) tomando c = a. Se γ = f (b) tomamos c = b.
Se f (a) < γ < f (b) seja g : [a, b] → R definida por g (x) = f (x) − γx.
Como g é contínua em [a, b] , g tem mínimo num ponto c ∈ [a, b] . Como
g (x) = f (x) − γ, tem-se g (a) = f (a) − γ < 0 e, como existe um intervalo
I contendo a e uma função φ : I → R contínua em a tal que g (x) − g (a) =
(x − a) φ (x) (porque g é diferenciável em a segundo Carathéodory), tem-se
φ (a) = g (a) < 0 e o sinal de φ prolonga-se a uma vizinhança de a, isto é,
φ (x) < 0 para x ∈ ]a, a + ε[ e certo ε > 0. Assim, g (x) < g (a) em ]a, a + ε[
e g não pode ter um mínimo em a. Deste modo, c = a. Analogamente se
provava que c = b. Assim, g tem o mínimo c num ponto interior de [a, b] .
Como g (c) = 0, tem-se f (c) − γ = 0, isto é, f (c) = γ. O caso onde
f (b) < γ < f (a) demonstra-se de modo análogo.
Teorema 6.8 (do limite da Derivada): Sejam I um intervalo de R com
mais de um ponto, a interior a I e f : I → R derivavél em I \ {a} , contínua
em a e tal que existe limx→a f (x) = l. Então, existe f (a) = l e portanto f é contínua em a.
(a)
é
Dem.: Uma vez que f é contínua em a, o cálculo de limx→a f (x)−f
x−a
0
uma indeterminação da forma 0 , ao qual é aplicável a regra de Cauchy devido
a f ser diferenciável em I \ {a} . Assim f (a) = l porque
f (x) − f (a)
f (x)
limx→a
= limx→a
=l
x−a
1
Teorema 6.9 (Teorema de Taylor): Seja f uma função derivável até à
ordem n + 1 no intervalo ]a, b[ e supondo que f (n) é contínua no intervalo
[a, b] . Se x e x0 são dois pontos de [a, b] com x = x0 , então existe um ponto
c entre x e x0 tal que
f (x) =
n
f (k) (x0 )
k=0
k!
(x − x0 )k +
f (n+1) (c)
(x − x0 )n+1 .
(n + 1)!
6.2. TEOREMAS FUNDAMENTAIS DO CÁLCULO DIFERENCIAL 59
A igualdade acima é conhecida por fórmula de Taylor com resto de
Lagrange:
f (n+1) (c)
R (x) =
(x − x0 )n+1 .
(n + 1)!
Com n = 0 a fórmula de Taylor não é mais do que a expressão do teorema
do valor médio de Lagrange.
60
CAPÍTULO 6. APLICAÇÕES DAS DERIVADAS
CAPÍTULO 7
Derivação Numérica
7.1
Introdução
Em muitas situações, o cálculo analítico da derivada revela-se moroso ou
mesmo impraticável, surgindo a necessidade de considerar uma aproximação
numérica. Por outro lado, os métodos discretizantes têm sido explorados
como tendo grande potencial didáctico.1
Vamos considerar, em primeiro lugar, algumas técnicas numéricas para
aproximar a derivação f (x) de uma dada função. As regras resultantes são
muito importantes para a solução numérica das equações diferenciais simples,
e esta é outra das razões da inclusão deste tópico no trabalho. As mesmas
podem também ser usadas para obter aproximações numéricas do valor da
derivada das funções.
Devemos salientar que a derivação numérica baseada na interpolação polinomial é basicamente um processo instável e que não se pode esperar uma boa
precisão mesmo quando se sabe que os dados originais são precisos. Como
se verá o erro f (x) − p (x) pode ser muito grande, especialmente quando
os valores de f (x) numa interpolação são dispersos. Toda esta problemática
vai-se tornar mais clara no que se segue.
Vamos supor conhecidas as técnicas de interpolação polinomial.
1
È o que acontece com a utilização das calculadoras para aproximar valores de funções,
por exemplo.
61
62
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
7.2
Derivadas de primeira ordem
Consideremos o problema de determinar o valor da primeira derivada de uma
função f num ponto x dado, sendo conhecidos os valores nodais yi = f (xi )
nos n + 1 nós distintos xi , i = 0, 1, ..., n. Designaremos por Ω = [a, b] o
menor intervalo que contém estes nós. A técnica para a resolução no nosso
problema usual consiste em construir o polinómio interpolador nestes pontos
e calcular analiticamente a respectiva derivada, esperando deste modo obter
uma aproximação suficientemente boa. Notando o polinómio interpolador
por pn e recordando o teorema2 sobre análise de erros, podemos escrever que,
para um ponto x qualquer,
en (x) = f (x) − pn (x) ,
(7.2.1)
en (x) = f [x0 , x1, ..., xn , x] wn (x) ,
(7.2.2)
em que en designa o erro da interpolação. Como sabemos do erro da
interpolação,
em que wn é o polinómio nodal
wn (x) =
n
i=0
(x − xi ) .
(7.2.3)
Por derivação de (7.2.1) e tendo em conta (7.2.2), temos que
en (x) = f (x) − pn (x)
= f [x0 , x1, ..., xn , x, x] wn (x) + f [x0 , x1, ..., xn , x] wn (x) . (7.2.4)
Existe um teorema3 que permite-nos obter uma outra forma de exprimir
en , talvez mais esclarecedora,
en (x)
=
1
1
f (n+2) (ξ) wn (x) +
f (n+1) (η) wn (x) . (7.2.5)
(n + 2)!
(n + 1)!
Teorema: Seja f ∈ C n+1 Ω e pn o polinómio de grau ≤ n que interpola f nos nós
distintos x0 , x1 , ..., xn contidos no intervalo. Então, para qualquer ponto x ∈ Ω, existe um
valor ξ ∈ Ω dependente de x0 , x1 , ..., xn , de x e de f, tal que
1
en (x) ≡ f (x) − pn (x) = (n+1)!
f (n+1) (ξ) wn (x)
3
Teorema: Seja f ∈ C k Ω e x0 , x1 , ..., xk nós distintos pertencentes ao intervalo Ω.
Então, existe um ponto ξ ∈ Ω tal que
1 (k)
f [x0 , x1 , ..., xk ] = k!
f (ξ) .
2
7.2. DERIVADAS DE PRIMEIRA ORDEM
63
onde ξ, η ∈ Ω. Há casos em que a expressão é simplificada.
O ponto x coincide com um dos nós. Suponhamos que o ponto
x em que se pretende obter o valor da derivada coincide com o nó xi . Neste
caso, tendo em conta a definição de wn dada pela expressão, (8.2.3) o primeiro
termo do segundo membro de (7.2.5) anula-se, ficando
1
f (n+1) (η) wn (xi ) =
(n + 1)!
n
1
(n+1)
=
f
(η)
(xi − xj )
(n + 1)!
i=0
en (xi ) =
(7.2.6)
j=i
O ponto x é um zero de wn . Em certos casos o ponto em que se
pretende calcular a derivada está disposto simetricamente em relação aos nós,
o que implica imediatamente que estes sejam em número par e que, portanto,
n seja ímpar. Se designarmos agora por x o ponto em que se quer calcular a
derivada, devido à simetria devemos ter que wn (x) = 0. Nesta circunstância
é o segundo termo do segundo membro da expressão (7.2.5) que se anula,
como vamos ver. Assim,
xn−i − x = x − xi ,
wn (x) =
n
i=0
i = 0, 1, ...,
n−1
2
n−1
(x − xi ) =
2
i=0
(x − xi ) (x − xn−i )
Mas, por outro lado,
x − xi = (x − x) + (x − xi )
x − xn−i = (x − x) + (x − xn−i ) = (x − x) − (x − xi )
pelo que
n−1
wn (x) =
2
i=0
Ora,
(x − x)2 − (x − xi )2
D (x − x)2 − (x − xi )2 = 2 (x − x)
64
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
pelo que este termo se anula quando x = x, e, por conseguinte, wn (x) = 0,
como pretendíamos concluir. A expressão do erro simplifica-se então para
n−1
2
1
(n+2)
en (x) =
(ξ)
− (x − x)2
f
(n + 2)!
i=0
(7.2.7)
Vejamos agora alguns casos particulares com maior aplicação.
7.2.1
Diferenças finitas de primeira ordem
Consideremos que n = 1 e x = x0 . Neste caso a função f é substituída pelo
polinómio p1 interpolador nos nós x0 e x1 , e a derivada f (x0 ), pelo valor da
derivada deste polinómio no ponto x0 . Assim, temos que
p1 (x) = f (x0 ) + f [xo , x1 ] (x − x0 )
p1 (x) = f [xo , x1 ]
e, portanto
f (x0 ) ≈ p1 (x) = f [xo , x1 ] =
f (x1 ) − f (x0 )
x1 − x0
Pondo h = x1 − x0 e usando a notação Dn f (x) para indicar a derivada
aproximada da função no ponto x, podemos escrever que nestas circunstâncias
Dh f (x) = f [x + h, x] =
f (x + h) − f (x)
h
(7.2.8)
Esta expressão é conhecida pela designação de diferença finita progressiva de primeira ordem.
Como o ponto x em que se calcula a derivada é um nó, podemos aplicar
a expressão (7.2.6) para obter o erro cometido, vindo para este caso
1
e1 (x) = − hf (ξ)
2
(7.2.9)
em que ξ ∈ [x0 , x1 ] . Se f ∈ C 2 [x0 , x1 ], donde o erro tende para zero com a
primeira potência de h se f ∈ C 2 [x0 , x1 ] .
7.2. DERIVADAS DE PRIMEIRA ORDEM
65
Outro caso com interesse corresponde a n = 1 e x = x1 . É facil concluir,
trocando os papéis de x0 e x1 , que
Dh f (x) = f [x, x − h] =
f (x) − f (x − h)
.
h
(7.2.10)
Esta fórmula é conhecida pelo nome de diferença finita regressiva de
primeira ordem. O erro vem agora dado por
1
e1 (x) = hf ” (ξ)
2
(7.2.11)
em que ξ ∈ [x0 , x1 ] . Notemos que os ξ que aparecem nas expressões (7.2.9) e
(7.2.11) não assumem necessariamente o mesmo valor.
1
Consideremos agora n = 1 e x = x0 +x
, ou seja, o ponto x ocupa
2
uma posição central relativamente aos nós. Pondo
h=
x0 + x1
, x0 = x − h, x1 = x + h
2
e repetindo a mesma sequência de cálculos dos casos anteriores, chegamos
sem dificuldade à expressão
Dh f (x) = f [x + h, x − h] =
f (x + h) − f (x − h)
,
2h
(7.2.12)
conhecida como fórmula de diferença finita central de primeira ordem.
Como o ponto x ocupa uma posição simétrica relativamente aos nós, a expressão (7.2.7) do erro é aplicável, sendo fácil concluir que
1
e1 (x) = − h2 f (3) (ξ)
6
(7.2.13)
Para funções f ∈ C 3 [x0 , x1 ] o erro tende agora para zero com h2 , o que
representa uma melhoria relativamente às fórmulas anteriores.
Exercício 7.1 Calcular a primeira derivada da função f (x) = exp (senx)
no ponto x = 0.5 utilizando as diferenças finitas de primeira ordem com
h = 0.01.
Resolução:
66
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
a) Diferenças progressivas. Pela expressão (7.2.8) temos que
(0.5)
Dh f (0.5) = f (0.5+0.01)−f
= 1.629344−1.6151460
= 1.4198.
0.01
0.01
O valor exacto é f (0.5) = 1.417424 pelo que cometemos um erro e =
−(0.2376)10−2 .
b) Diferenças regressivas. A aplicação da expressão (7.2.10) fornece
(0.5−0.01)
Dh f (0.5) = f (0.5)−f0.01
= 1.615146−1.6009960
= 1.4150
0.01
−2
e o erro é, portanto, e = (0.2124)10
c) Diferenças centrais. A expressão 7.2.12 dá
(0.5−0.01)
Dh f (0.5) = f (0.5+0.01)−f
= 1.629344−1.6009960
= 1.4174
0.02
0.02
−4
Agora, o erro cometido é e = (0.24)10 , francamente melhor que os anteriores. Fica assim confirmado o que se disse relativamente à superioridade
das diferenças centrais.
7.2.2
Diferenças finitas de segunda ordem
Todas as fórmulas deduzidas até aqui foram baseadas em interpolação linear.
Vejamos o que se consegue quando se passa a usar polinómios interpoladores
de segundo grau, isto é, n = 2. Este polinómio e a sua derivada são dados
por
p2 (x) = f (x0 ) + f [xo , x1 ] (x − x0 ) + f [xo , x1, x2 ] (x − x0 ) (x − x1 )
p2 (x) = f [xo , x1 ] + f [xo , x1, x2 ] (x − x0 + x − x1 )
Consoante a posição do ponto x relativamente aos nós x0 , x1 e x2 , assim se
conseguem obter diferentes fórmulas. Se x = x0 vem que
Dh f (x0 ) = f [xo , x1 ] + f [xo , x1, x2 ] (x − x0 )
(7.2.14)
cujo erro deduzido de (7.2.6) é dado por
1
e2 (x0 ) = − f (3) (ξ) (x0 − x1 ) (x0 − x2 )
6
No caso especial de os nós serem equidistantes com
(7.2.15)
7.2. DERIVADAS DE PRIMEIRA ORDEM
67
h = x1 − x0 = x2 − x1
as expressões (7.2.14) e (7.2.15) particularizam-se, dando
Dh f (x) =
−3f (x) + 4f (x + h) − f (x + 2h)
2h
1
e2 (x) = h2 f (3) (ξ)
3
(7.2.16)
(7.2.17)
As expressões (7.2.14) e (7.2.16) são conhecidas por diferenças finitas progressivas de segunda ordem.
Nota 7.1 Apesar de empregar três pontos de interpolação e, portanto, mais
informação sobre a função f , estas fórmulas apresentam uma estimativa de
erro menos favorável que a da fórmula da diferença finita central de primeira
ordem. Este facto revela a influência benéfica decorrente da posição simétrica
do ponto onde se calcula a derivada relativamente aos nós.
Se fizermos x = x2 chegamos à fórmula de diferenças finitas regressivas de segunda ordem e respectivo erro, análogas a (7.2.14) e (7.2.15),
Dh f (x2 ) = f [xo , x1 ] + f [xo , x1, x2 ] (2x2 − x0 − x1 )
(7.2.18)
1
e2 (x2 ) = − f (3) (ξ) (x2 − x1 ) (x2 − x0 )
6
(7.2.19)
e a (7.2.16) e (7.2.17)
Dh f (x) =
3f (x) − 4f (x − h) + f (x − 2h)
2h
1
e2 (x) = h2 f (3) (ξ)
3
(7.2.20)
(7.2.21)
68
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
Por outro lado, se x = x1 , um processo em tudo semelhante conduz-nos às
seguintes relações,
Dh f (x1 ) = f [xo , x1 ] + f [xo , x1, x2 ] (x1 − x0 )
(7.2.22)
1
e2 (x1 ) = f (3) (ξ) (x1 − x0 ) (x1 − x2 )
6
(7.2.23)
Se os nós forem equidistantes, então podemos concluir, após algumas manipulações simples, que
f (x + h) − f (x − h)
2h
expressão que não é outra senão a da diferença central de primeira ordem já
obtida atrás, (7.2.12).
Dh f (x) =
7.3
Derivadas de segunda ordem
As técnicas que expusemos na secção anterior generalizam-se facilmente ao
cálculo de derivadas de ordem superior. Vejamos como deve proceder para o
caso das segundas derivadas. É claro que o primeiro polinómio a considerar
deverá ser de grau n = 2 interpolando nos nós x0, x1, x2 , donde
p2 (x) = f (x0 ) + f [xo , x1 ] (x − x0 ) + f [xo , x1, x2 ] (x − x0 ) (x − x1 )
p2 (x) = 2f [xo , x1, x2 ]
e, por conseguinte,
f (x) ≈ p2 (x) = 2f [xo , x1, x2 ]
para qualquer x ∈ [x0 , x1 , x2 ] . Se os nós forem equidistantes, a expressão
anterior conduz a esta outra
Dh2 f (x) =
f (x − h) − 2f (x) + f (x + h)
h2
(7.3.1)
7.3. DERIVADAS DE SEGUNDA ORDEM
69
Passemos agora à análise dos erros. Retomando a expressão 7.2.4, temos
para o presente caso que
e2 (x) = f [x0 , x1, x2 , x, x, ] w2 (x) + f [x0 , x1, x2 , x] w2 (x)
Derivando novamente esta expressão, vem que
e2 (x) = f [x0 , x1, x2 , x, x, x] w2 (x) +
2f [x0 , x1, x2 , x, x] w2 (x) + f [x0 , x1, x2 , x] w2 (x)
Se x coincidir com algum dos nós resulta que w2 (x) = 0 e a expressão
anterior pode escrever-se, substituindo as diferenças divididas por derivadas,
do seguinte modo
e2 (x) =
1 (4)
1
f (ξ) w2 (x) + f (3) (η) w2 (x)
12
6
(7.3.2)
em que ξ, η ∈ Ω. No caso de os nós serem equidistantes, não existe dificuldade
em concluir que
1
e2 (x0 ) = h2 f (4) (ξ) − hf (3) (η)
6
(7.3.4)
1
e2 (x2 ) = h2 f (4) (ξ) + hf (3) (η)
6
(7.3.5)
Quando x = x1 , isto é, quando a segunda derivada for calculada por
uma diferença finita central, o termo em h nos segundos membros destas
expressões anula-se, ficando então,
1 2 (4)
h f (η)
12
em que, mais uma vez, se revela a vantagem das diferenças finitas centrais.
e2 (x1 ) = −
70
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
Exercício 7.2 Uma partícula move-se sobre o eixo dos x, tendo-se registado
as seguintes posições ao longo do tempo t:
t 0.0
x 0.0
0.2
0.4
0.1987 0.3894
0.6
0.8
1.0
0.5646 0.7174 0.8415
Pretende-se determinar a aceleração nos instantes t = 0, 0 e t = 0, 6.
Tabela: Coeficiente das fórmulas de diferenciação numérica com nós
equidistantes
f
j
0
1
0
1
2
0
1
2
3
0
1
2
3
4
(k)
n
k! 1 (xj ) ≈
ai f (xi )
n! hk i=0
Primeira derivada (k = 1)
a0
a1
a2 a3 a4
erro
−1
1
− 12 hf (2)
1
−1
1
hf (2)
2
1 2 (3)
−3
4 −1
hf
3
1 2 (3)
−1
0
1
−6h f
1 2 (3)
1 −4
3
hf
3
−11
18 −9
2
− 14 h3 f (4)
1 3 (4)
−2 −3
6 −1
hf
12
1 3
1 −6
3
2
− 12
hf
1 3
−2
9 −18
11
hf
4
1 4 (4)
−50
96 −72
32 −6
hf
5
1 4 (4)
−6 −20
36 −12
2 − 20 h f
1 4 (4)
2 −16
0
16 −2
hf
30
1 4 (4)
−2
12 −36
20
6 − 20 h f
1 4 (4)
6 −32 −72 −96 50
hf
5
7.3. DERIVADAS DE SEGUNDA ORDEM
j
a0
0
1
1
1
2
1
0
6
1
3
2
0
3 −3
0 35
1 11
2 −1
3 −1
4 11
71
Segunda derivada (k = 2)
a1
a2
a3
a4
en
−2
1
−hf (3)
1 2 (4)
−2
1
− 12
hf
−2
1
hf (3)
11 2 (4)
−15
12
−3
hf
12
1 2 (4)
−6
3
0
− 12 h f
1 2 (4)
3 −6
3
− 12
hf
11 2 (4)
12 −15
6
hf
12
5 3 (5)
−104 114 −56 11 − 24 h f
1 3 (5)
−20
6
4 −1
hf
12
1 4 (5)
16 −30
16 −1
hf
90
1 3 (5)
4
6 −20 11 − 12
hf
5 3 (5)
−56 114 −104 35
hf
24
Nota 7.2 As derivadas na expressão do erro são calculadas num ponto ξ ∈
[x0 , ..., xn ] .
Como se sabe, a aceleração é a segunda derivada da posição em ordem
ao tempo. O problema resume-se pois, a obter x (0.0) e x (0.6) a partir dos
valores medidos. Para calcular o primeiro valor vamos utilizar a fórmula da
tabela (k = 2, n = 2).
2! 1
[x (0) − 2x (0.2) + x (0.4)] =
2! 0.22
1
=
[0.0 − 2 × 0.1987 + 0.3894] = −0.2000
0.04
Dh2 x (0.0) =
Para o cálculo do segundo valor usaremos duas fórmulas do mesmo quadro
para efeitos de comparação.
2! 1
[x (0.4) − 2x (0.6) + x (0.8)] =
2! 0.22
0.3894 − 2 × 0.5646 + 0.7174
= −0.5600
=
0.04
Dh2 x (0.6) =
72
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
2! 1
[−x (0.2) + 16x (0.4) − 30x (0.6) + 16x (0.8) − x (1.0)] =
2! 0.22
−0.1987 + 16 × 0.3894 − 30 × 0.5646 + 16 × 0.7174 − 0.8415
=
0.48
= −0.5612
Dh2 x (0.6) =
Os dois valores calculados para Dh2 x (0.6) são muito próximos.
7.4
Diferenciação com splines
É possível, através da utilização de splines, obter fórmulas de diferenciação
numérica de elevada precisão. Consideremos, a título de exemplo, o spline
cúbico cuja equação é,
(xi − x)
(x − xi−1 )3
Si (x) = Mi−1
+ Mi
+
6hi
6hi
hi xi − x
hi x − xi−1
+ yi−1 − Mi−1
+ yi − Mi
6
hi
6
hi
para x ∈ [xi−1, xi ] . As derivadas desta função são dadas por
Si
(xi − x)2
(x − xi−1 )2 yi − yi−1
hi
(x) = −Mi−1
+ Mi
+
+ (Mi−1 − Mi )
2hi
2hi
hi
6
Si (x) = −Mi−1
xi − x
x − xi−1
+ Mi
hi
hi
Então, fazendo
Dh f (x) = S (x)
e Dh2 f (x) = S (x)
obtemos as desejadas fórmulas de diferenciação numérica.
Segundo Heitor de Pina [18], uma desvantagem que pode ser apontada a
este método é a de que a construção do spline, envolvendo a solução de um
sistema de equações lineares, pode torná-lo computacionalmente caro e, por
ventura, colocá-lo em inferioridade face a outras alternativas.
A opção terá pois que ter em conta necessariamente os vários aspectos do
problema, nomeadamente precisão pretendida versus custo computacional (
número de operações a serem realizada pelo computador).
7.5. INFLUÊNCIA DOS ERROS DE ARREDONDAMENTO
7.5
73
Influência dos erros de arredondamento
As expressões do erro deduzidas nas secções anteriores mostram que, se as
derivadas apropriadas da função f forem limitadas, a derivada calculada
pelas fórmulas de diferenças finitas converge para o valor exacto com uma
certa potência do parâmetro h. No entanto, se tivermos em conta os erros
de arredondamento, esta situação altera-se radicalmente como vamos ver.
Exercício 7.3 Mostrar a influência dos erros de arredondamento.
Consideramos o cálculo da derivada da função f (x) = senx no ponto x =
0.5 pelas fómulas das diferenças finitas progressivas, regressivas e centrais.
Os
resultados obtidos para diferentes valores h estão resumidos no quadro
seguinte.
h
progressivas
.1000E + 00
.2249E − 01
.2000E − 01 .4736E − 02
.4000E − 02 .9602E − 03
.8000E − 03 .2077E − 03
.1600E − 03 .9596E − 04
.3200E − 04 .6548E − 03
.6400E − 05 .2517E − 02
.1280E − 05 .7174E − 02
Erro (em valor absoluto)
Diferenças finitas
regressivas
centrais
.2541E − 01
.1462E − 02
.4854E − 02
.5913E − 04
.9621E − 03
.9537E − 06
.2021E − 03
.2801E − 05
.2766E − 03
.9030E − 04
.2766E − 03
.1891E − 03
.6796E − 02
.2139E − 02
.3939E − 01
.1611E − 02
Como se vê, o erro diminui numa primeira fase com h mas, abaixo de
um certo valor deste parâmetro, dependente da fórmula utilizada, começa a
crescer.
Analisemos do ponto de vista teórico este efeito, considerando, para concretizar ideias, o caso das diferenças finitas centrais. De acordo com as expressões (7.2.12) e (7.2.13) podemos dizer que
f (x) =
f (x + h) − f (x − h) 1 (3)
− f (ξ) h2
2h
6
(7.5.1)
74
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
Figura 7.1:
A figura mostra-nos a variação do erro |E| com h.
Mas, como admitimos que há erros de arredondamento, em vez dos valores
exactos da função f , o que efectivamente usamos na fórmula das diferenças
finitas são valores aproximados. Denotando estes por f, teremos que
f (x) = f(x) + e (x)
em que e (x) representa o erro de arredondamento cometido. Introduzindo
esta relação em (7.5.1) obtemos
f(x + h) − f(x − h) e (x + h) − e (x − h) h2 (3)
+
− f (ξ)
2h
2h
6
f (x + h) − f (x − h)
=
+E
(7.5.2)
2h
em que pusemos
f (x) =
e (x + h) − e (x − h) h2 (3)
(7.5.3)
− f (ξ)
2h
6
O significado deste E é o do erro final cometido no cálculo da derivada,
o qual, como se reconhece, é composto de duas partes distintas: uma, proveniente da fórmula de diferenças finitas e proporcional a h2 , e outra, resultante dos erros de arredondamento e proporcional a 1/h. Como os erros de
E=
7.5. INFLUÊNCIA DOS ERROS DE ARREDONDAMENTO
75
arredondamento não tendem necessariamente para zero com h, acontece que
este tipo de erros será predominante quando h → 0. A figura 7.1 mostra
qualitativamente o andamento |E| com h.
Esta discussão e o aspecto da figura 7.1 sugerem que deve haver um valor
de h para o qual o erro E é mínimo e, portanto, deveria ser este o valor a usar.
Infelizmente, como na expressão (7.5.3) não são conhecidos nem a função e
nem o valor de ξ, torna-se inviável obter o valor de h óptimo por minimização
de E tomado como função de h. No entanto, é possível empreender uma
análise que, embora aproximada, poderá dar alguma indicação sobre a ordem
de grandeza do valor óptimo de h, o que talvez seja suficiente em termos
práticos. Assim, admitamos as seguintes hipóteses:
(3)
f (x) ≤ M3
∞
e |
e (x + h) − e (x − h) | ≤ 2
em que M3 designa um majorante das terceiras derivadas e ∈ é um parâmetro
que depende da forma como a função f é calculada. De um modo geral, o
valor de ∈ será, em termos relativos, da ordem de grandeza da unidade de
arredondamento do computador utilizado.
Então, aceitando estas premissas, podemos dizer que
|E| ≤
M3 2
+
h
h
6
O segundo membro desta expressão é mínimo quando
h=
3
M3
13
Este valor pode ser tomado como uma estimativa para o valor de h óptimo
desde que as hipóteses que aceitamos sejam rezoavelmente verificadas.O valor
previsto dado por esta fórmula em termos de grandeza é comprovado com os
dados do exemplo (7.5.1) da secção anterior.
Chamamos a atenção para o facto de que o valor do passo h não pode ser
tal que f (x ± h) = f (x) , isto é, que o computador seja incapaz de distinguir
estas abcissas e forneça o valor zero para as derivadas. Acontece que o valor
h óptimo está normalmente acima deste limite último.
76
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
7.6
Extrapolação de Richardson
Mostrámos na secção anterior que os erros de arredondamento limitam seriamente a precisão que é possível obter com as fórmulas de derivação numérica.
Vamos ver que existe um processo de minorar, mas não eliminar totalmente,
o efeito da aritmética de precisão finita.
Para concretizar ideias, consideremos a fórmula de diferenças finitas progressivas de primeira ordem (7.2.8). Admitindo que f tem a regularidade
necessária, o erro pode ser expresso, em alternativa a (7.2.9), por
f (x + h) − f (x)
=
h
∞
1 1 2
= − f (x) h − f (x) h − ... =
ci hi
2
3!
i=1
e (x) = f (x) − Dh f (x) = f (x) −
(7.6.1)
Ou seja, o erro é dado por uma série de potências do passo h em que os
coeficientes ci envolvem as derivadas f (i) sendo, por isso, difíceis de calcular
em geral. Nestas condições
Dh f (x) = f (x) +
∞
ci hi
(7.6.2)
i=1
O processo de extrapolação de Richardson consiste em considerar a
derivada dada, não por (7.6.2) , mas por uma série truncada a partir de um
certo termo,
Dh f (x) ≈ f (x) +
k
ci hi
(7.6.3)
i=1
e ajustar um polinómio em h de grau ≤ k aos valores obtidos para uma
sucessão decrescente {hi }ki=0 . O valor deste polinómio no ponto h = 0 fornece
naturalmente uma aproximação, em princípio melhor, para f (x) . O facto
de h = 0 não pertencer ao intervalo de interpolação justifica a designação
adoptada para o método.
Designemos por Dm,k o valor extrapolado usando os seguintes nós de interpolação, hm , hm+1 , ..., hm+k . A fórmula4 de Aitken-Neville permite obter
4
No ponto x = 0 do polinómio interpolador se pode calcular pela fórmula de recorrência
7.6. EXTRAPOLAÇÃO DE RICHARDSON
77
este valor sem necessidade de construir explicitamente o polinómio interpolador, vindo
Dm ,k+1 =
hm+k+1 Dm,k − hm Dm+1,k
.
hm+k+1 − hm
(7.6.4)
Uma sucessão frequentemente utilizada é hi = h0 /2i , i = 0, 1, 2, ..., ou
seja, procedendo por bissecções de um intervalo original h0 .
Exercício 7.4 Aplicar o processo de extrapolação de Richardson ao cálculo
de f (0) com f (x) = exp x com diferenças finitas centrais e bissecção dos
passos.
O erro vem agora dado por
f (x + h) − f (x − h)
=
h
∞
1 (5)
(3)
2
2
= −f (x) h − f (x) h − ... =
ck h2k
60
k=1
e (x) = f (x) − Dh f(x) = f (x) −
ou seja, o erro envolve apenas potências pares do passo h. Faz, pois,
todo o sentido por razões de eficácia considerar polinómios em h2 em vez de
h. A fórmula correspondente a 7.6.4 é, portanto,
Dm ,k+1 =
h2m+k+1 Dm,k − h2m Dm+1,k
Dm+1,k − Dm,k
= Dm+1,k +
2
2
hm+k+1 − hm
(hm /hm+k+1 )2 − 1
que hi = h0 /2i . A tabela seguinte mostra os resultados obtidos com h0 = 0, 4
e trabalhando com os 8 dígitos indicados.
m hm
0 .40
Exercício 7.5 1 .20
2 .10
3 .05
Dm,0
Dm,1
Dm,2
Dm,3
1.0268808 0.99994667 0.99999979 1.0000002
1.0066802 0.99999647 1.0000002
1.0016674 0.99999993
1.0004168
Pm ,k+1 (0) =
xm+k+1 Pm,k (0) − xm Dm+1,k (0)
.
xm+k+1 − xm
78
CAPÍTULO 7. DERIVAÇÃO NUMÉRICA
Como se vê, D1,2 e D0,3 aparecem com valores idênticos, sinal de que com
os 8 dígitos de precisão não é possível ir mais longe. Pode-se ainda verificar
que seria possível atingir este valor com D9,0, mas para tal seria necessário
trabalhar com cerca de 16 dígitos de precisão!
Nota 7.3 O processo de extrapolação de Richardson é uma técnica geral,
utilizável sempre que o erro possa ser expresso por uma série envolvendo um
dado parâmetro do método utilizado.
CAPÍTULO 8
Alguns aspectos da Didáctica
da Matemática
8.1
Introdução
Tendo em conta o tema que nos propusemos tratar, no âmbito da fundamentação teórica da problemática em estudo, introduzimos o presente capítulo
nesta parte de fundamentação téorica como forma de salientar alguns aspectos básicos da Didáctica da Matemática e em particular da Didáctica da
Análise e da derivada, como forma de providenciar referências de base aos
argumentos que apresentaremos na segunda e terceira parte do trabalho.
O estudo do processo ensino-aprendizagem, particularmente em situação
escolar, é o objecto da Didáctica Geral, que se caracteriza por visar o sucesso
do processo de ensino-aprendizagem, ao assentar esse processo, por um lado
em bases provenientes da própria ciência, por outro lado em bases psicopedagógicas, e por outro lado ainda em técnicas de ensino. A Didáctica
da Matemática é uma didáctica específica que, naturalmente vai-se assentar
nas características próprias da Matemática como ciência, seu ensino e sua
aprendizagem. João Pedro da Ponte [20], utiliza o termo “Didáctica da
Matemática” para designar o campo de estudos que procura tratar, com
base em paradigmas de investigação (empírica ou teórica) os problemas do
ensino e aprendizagem da Matemática.
Assim colocaremos em foco algumas características próprias da Matemática,
que influenciam o processo de ensino e de aprendizagem, algumas características epistemológicas muito particulares ao processo de aprendizagem
79
80CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
da Matemática e finalmente, através de exemplos, mostrar algumas técnicas
de ensino da derivada.
Diferentes autores do campo da Didáctica da Matemática tem vindo a
desenhar um conjunto de dificuldades do ensino-aprendizagem dos principais conceitos da Análise Matemática. Eles consideram-se como dificuldades
essenciais o conceito de limite e dos processos infinitos que intervem nos
conceitos básicos de Derivada e Integral. Por isso ainda no presente capítulo
pretendemos esclarecer alguns aspectos da Didáctica da Análise Matemática,
concretamente o conceito de limite e em particular o da Derivada.
Compreender todos esses aspectos pode levar a modificar substancialmente as opções didácticas a tomar e, consequentemente, os métodos e recursos a empregar, as expectativas em relação aos alunos e as interpretações
dos resultados obtidos.
Começaremos por ver brevemente alguns processos do pensamento matemático;
na secção seguinte serão revisitados alguns conceitos do método axiomático;
o papel das definições, bem como o papel dos teoremas, nos processos de conceptualização e de ensino da Matemática serão revistos nas secções seguintes;
a última secção trata do problema específico da Didáctica da Análise e das
Derivadas, apresentando alguns conceitos, profusamente ilustrados com exemplos.
8.2
Processos do pensamento matemático
Segundo Dreyfus (1991), "compreender é um processo que tem lugar na
mente do estudante" e é o resultado de "uma larga sequência de actividades de aprendizagem durante as quais ocorrem em interacções uma grande
quantidade de processos mentais". Quando se refere a processos cognitivos
implicados em pensamento matemático, pensa-se em uma série de processos
matemáticos entre as quais se destaca o processo de abstracção. Segundo
o matemático Reuben Hersh "a abstração é a alma da Matemática".
Esse processo consiste na substituição de fenómenos concretos por conceitos
confinados na mente.
Não se pode dizer que a abstração é uma característica exclusiva das
matemáticas superiores, e nem tão pouco outros processos cognitivos da componente matemática como analisar, categorizar (classificar), conjecturar, generalizar, sintetizar, definir, demonstrar e formalizar. Pois resulta evidente que
estes três últimos adquirem maior importância nos cursos superiores: a pro-
8.3. O MÉTODO AXIOMÁTICO
81
gressiva matematização implica a nessecidade de abstrair, definir, demonstrar
e formalizar. A seguir pode-se considerar o processo de definição. A definição
de um conceito matemático é uma sequência de palavras ou uma definição
verbal do conceito, fruto da sua evolução histórica. Partindo de algumas
ideias ou princípios e tendo por base algumas regras bem definidas, criamse novas definições das quais muitas vezes se inferem propriedades."Como
o método de demonstração de teoremas, a Matemática continua a ser
a ciência do rigor e da ordem". E podemos considerar a Matemática
como o cimento unificador de todos os saberes. A matemática é um saber
necessário a todas as disciplinas e ciências, devido ao seu rigor. Deste modo
se mostra que as outras ciências não se desenvolveriam se a Matemática não
existisse e não fosse estudada.
O sucesso escolar em Matemática se pode relacionar com a riqueza e a
flexibilidade das representações mentais dos conceitos matemáticos.
8.3
O método axiomático
Segundo S. Fomine e Berkinmblit [6], toda a ciência começou por ser descritiva, até uma ciência tão abstracta como a Matemática. Os sábios do
Egipto e da Antiga Babilónia conheciam uma grande quantidade de factos
matemáticos, que hoje chamaríamos teoremas. Porém tratava-se apenas de
meras observações. A Matemática tornou-se numa ciência axiomática
quando adoptou a lógica como seus fundamentos.
O método axiomático depende absolutamente da lógica. Consiste no estabelecimento de proposições tomadas como verdadeiras, designadas por axiomas, e na dedução, através da lógica, de outras proposições verdadeiras,
designadas teoremas, com base nas proposições primeiras.
No processo de matematização das ciências, o estabelecimento dos axiomas deve-se revestir de muitos cuidados, no sentido de estes se adequarem
o mais possível à realidade que se pretende matematizar. Obtém-se então
uma teoria formal, com objectos estabelecidos em definições e proposições
sobre os objectos (teoremas, proposições, propriedades, lemas e corolários).
Temos como exemplos a mecânica clássica, a mecânica quântica, as diversas
teorias sobre mercados de capitais, a biologia e a genética das populações, a
termodinâmica, etc.
82CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
8.4
O papel das definições
Para Carmen Matias [30], uma das formas de estabelecer a diferença entre a
Matemática elementar e avançada é considerar que nas primeiras os objectos
se descrevem e nas segundas se definem.
Os Axiomas, definições e hipóteses são partes fundamentais de todo argumento de natureza lógica e/ou matemática. Definir é uma actividade de suma
importância para qualquer ramo do conhecimento. Não há possibilidades de
alcançar rigor científico sem antes dispor de definições claras e precisas.
Segundo a autora [30], adquirir um conceito matemático pode descreverse como construir um esquema conceptual do mesmo. Memorizar a definição
de um conceito não garante em absoluto compreender seu significado. Saber
se de memória a definição de um conceito não significa em absoluto compreender seu significado. Na realidade compreender significa ter um esquema
conceptual de forma que associam certos significados a palavra que designa o
conceito: Imagens mentais, propriedades, procedimentos, experiências, sensações.
Em campo da Matemática, como por exemplo em Análise Matemática, as
definições desempenham um papel muito importante em realizações de tarefas cognitivas, e por conseguinte, em formação de esquemas conceptuais. Daí
a necessidade de criar situações didácticas adequadas nas quais as definições
são impeescendíveis para uma correcta realização das tarefas.
Para saber Matemática é indispensável conhecer as suas definições e saber
utilizá-las adequadamente. Ao longo do estudo, cada vez são necessárias mais
definições que utilizam as já conhecidas. Por isso, não saber a tabuada dificulta ou impossibilita o cálculo das operações com números relativos e depois
prejudicará a resolução de equações e mais tarde o estudo de funções. As
definições da Matemática são elementares mas relacionadas. Enquanto se estuda Matemática vai-se conhecendo as definições, alguns exemplos, observações e finalmente resolve-se exercícios.
Para Werner Jungk [11], segundo a apresentação e organização de maioria
dos livros de textos e de boa parte das classes de matemáticas parecem basearse no pressuposto de que os conceitos se adquirem mediante as suas definições
e que os estudantes utilizam as definições em realizações de tarefas ou na
resolução de problemas.
Para alguns autores as definições têm um papel epistimológico fundamental e para outros o seu papel é ontológico.
Por definição entende-se o seguinte:
8.5. O PAPEL DOS TEOREMAS
83
a) Uma determinação do que é objecto, como se origina e como se reconheça; ou
b) Uma regra que estabelece como se utiliza um signo verbal; ou
c) Uma determinação ou uma regra que indica ou estabelece o que significa
ou deve significar um signo verbal.
Pode se escrever uma definição em forma de equação X := Y . Nesta
equação X é o que deve ser definido e por Y entende-se o que define X.
8.5
O papel dos teoremas
Segundo Werner Jungk [10] cada teoria matemática possui como base um
sistema de conceitos e teoremas fundamentais ou seja um sistema de Axiomas.
As relações entre os conceitos básicos se descrevem por meio de Axiomas.
Dos conceitos básicos se obtem novos conceitos mediante definições. Dos
Axiomas e dos conceitos deles deduzidos, se obtem proposições matemáticas
deduzidas e a sua veracidade é comprovada mediante demonstrações.
Tipicamente a estrutura de uma teoria obedece às seguintes cadeias:
Conceitos básicos ⇒Conceitos deduzidos ⇒Outros conceitos;
Axiomas ⇒Teorema deduzidas ⇒Outros teoremas;
Demonstração é uma cadeia finita de proposições verdadeiras que se
obtem com ajuda de regras de inferência lógica. O ponto de partida desta
cadeia são proposições cuja veracidade é conhecida. No ponto final da cadeia
é o teorema a demonstrar.
Na Matemática, uma prova é uma demonstração de que, dados certos
axiomas, o enunciado considerado é necessariamente verdadeiro. As provas
empregam lógica mas usualmente incluem questões de linguagem formal. O
resultado provado é um teorema. A prova completa mostra como o resultado
é consequência dos axiomas. Uma vez o teorema provado, ele pode ser usado
como base para provar outros enunciados.
84CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
8.6
8.6.1
Introdução à Didáctica da Análise e das
Derivadas
O conceito de limite
Análise Matemática é a área da Matemática que se ocupa dos conceitos e
técnicas que envolvem infinitesimais e infinitamente grandes. Dos conceitos
que envolvem limites, portanto. É também chamada de análise infinitésimal,
em nomenclatura mais clássica.
A Análise Matemática está presente em quase todas as outras áreas da
Matemática, desde a Análise numérica (que está dividida em métodos da
Análise Matemática e métodos da Álgebra — focando a geometria numérica
com a computação: geometria computacional), as Equações Diferenciais, a
Geometria Diferencial, etc.
No terceiro ciclo do ensino secundário em Cabo Verde inicia-se o estudo
dos conceitos da Análise, com o estudo das sucessões e sua convergência, até
ao Cálculo Diferencial, objecto do nosso trabalho. Assim, a Didáctica das
derivadas está compreendida na Didáctica da Análise em geral.
A Didáctica da Análise Matemática pressupõe a Didáctica das funções
reais de variável real, e em particular das funções de variável natural ou
sucessões. Vamos considerar essa matéria como pré requisitos.
O ensino e a aprendizagem da Análise Matemática tem como objectivo
primordial a compreensão das noções de limite e convergência. A maior
dificuldade na compreensão desses dois processos está relacionado com a existência, nas definições acima referidas, de vários quantificadores em cadeia.
Vejamos as definições de convergência de uma sucessão e de limite de uma
função:
Definição 8.1 Uma sucessão (Un ) é convergente para l (que se diz limite
da sucessão) em R sse qualquer que seja δ > 0, existe uma ordem depois da
qual todos os termos da sucessão são valores aproximadas de l a menos de δ.
Traduz-se que l é limite de uma sucessão (Un ), escrevendo U n → l.
Tem-se, pois,
Un → l ⇔ ∀δ > 0 ∃p ∈ N : n < p =⇒n |Un − l| < δ
8.6. INTRODUÇÃO À DIDÁCTICA DA ANÁLISE E DAS DERIVADAS85
Definição 8.2 Sendo a e b elementos de R, diz-se que uma função, f (x),
real de variável real, tem por limite b, quando x tende para a e escrevese limx→a f (x) = b sse a toda a sucessão x1 , x2 , ....xn , ...., de valores de x
(distintos de a é todos pertencentes ao domínio da função), tendente para a,
corresponde uma sucessão f (x1 ) , f (x2 ) ..., f (xn ) ..., tendente para b.
Simbolicamente pode-se escrever, para a ponto de acumulação do domínio
de f ,
lim f (x) = b ⇐⇒ (Un → a ∧ (Un ∈ Df \ {a} , ∀n ) =⇒ f (Un) → b
x→a
ou ainda
lim f (x) = b ⇐⇒ ∀ (Un ) (Un → a ∧ (Un ∈ Df \ {a} , ∀n ) =⇒ f (Un ) → b
x→a
A maior dificuldade existente reside no facto de os quantificadores esconderem a intuitividade que encerra o processo: o do movimento do x num
determinado sentido e o consequente movimento do y = f (x) noutro sentido, dependente da função. O recurso aos quantificadores torna estático o
movimento, mas é a única forma de em Análise Matemática formalizar esse
movimento, tendo sido introduzido por Cauchy e Weiertrass, aquando da
rigorização da análise ocorrida nos finais do século dezanove.
Hoje podemos recorrer a programas informáticos para transmitir com
rapidez e segurança a intuitividade do movimento. Vejamos, por exemplo, o
programa "estudo de funções" de josé Leal (Anexo 2).
Após haver explorado e compreendido o movimento implícito no processo
de convergência, através da observação de vários casos no programa referido,
pode-se seguramente, discutindo com os estudantes, sobre que instrumentos
teóricos possuem para formalizar o movimento, introduzir a tão chamada
definição "epsilon-delta".
Uma vez compreendido o conceito de limite, compreendem-se os de continuidade e de derivação num ponto, que são casos particulares de limites.
Está-se então em condições de aplicar as noções, de Didáctica das derivadas,
essenciais ao ensino e à aprendizagem das derivadas, naquilo que têm de
específico, para além do conceito de limite.
86CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
8.6.2
A derivada
Como vimos acima, a derivada de uma função é o limite da razão entre o
incremento da função num ponto e o incremento da variável nesse ponto. Se
tivermos em atenção o facto simples de uma função envolver uma variável
dependente e a respectiva variável independende, isto é, encerrar em si a
relação entre uma causa e sua consequência, vemos a grande potencialidade
existente na utilização das derivadas.
Se a utilização da Matemática nas diversas outras áreas científicas são
encontrar as boas equações que traduzam as relações de dependência entre
variáveis (estas representando as grandezas em questão), boa parte dessas
equações são diferenciais, isto é, envolvem funções e suas derivadas.
Em particular pode-se destacar que os problemas concretos de máximos e
de mínimos são considerados como uma das mais importantes aplicações da
Análise Infinitesimal á Tecnologia e à Ciência. Entre os problemas clássicos
que envolvem funções e suas derivadas temos:
- Problemas geométricos;
- O crescimento de populações;
- Taxas de variação instantâneas;
- Problemas de máximos e mínimos (optimização de funções);
- Problemas de difusão (calor, ...);
- Problemas financeiros.
Mas problemas muito elementares e didácticos são também passíveis de
exploração em classe, dado constituirem paradigmas ou modelos de referência. Uma breve referência à modelação matemática e àquela que recorre às
derivadas como sua ferramenta principal é o objecto da subsecção seguinte.
8.6.3
Modelação matemática
Segundo João Filipe Matos [14], a modelação matemática é entendida como
um processo que tem origem num dado fragmento da realidade e culmina na
construção de um modelo matemático dessa realidade. Esse processo tende
a ser visto como um percurso bem definido cujos passos são delimitados e
dispostos em ordem sequencial. O processo de modelação consiste num ciclo,
com os seguintes passos:
1. Identificação de uma situação real;
2. Tradução de aspectos relevantes da situação para um modelo matemático;
3. Investigação sobre o modelo matemático;
8.6. INTRODUÇÃO À DIDÁCTICA DA ANÁLISE E DAS DERIVADAS87
4. Obtenção de novas informações acerca da situação através da tradução
dos resultados (obtidos sobre o modelo) para a situação real;
5. Avaliação da adequação e ajustamentos dos resultados à situação real.
Collinson (1980), em João Filipe Matos [14], afirma que a modelação
matemática consiste na descrição dos fenómenos observados através de estruturas matemáticas. Acrescenta ainda que a combinação das referidas estruturas matemáticas constitui um modelo matemático do fenómino observado. Na sua perspectiva, uma das consequências da formulação de modelos
matemáticos está no facto de tornar possível a manepulação dos objectos
matemátivos envolvidos na descrição do fenómino e, eventualmente, de permitir prever novas ocorrências no "mundo real" (mundo dos fenómenos observados). Se as previsões forem confirmadas na realidade, conclui-se que o
modelo matemático é satisfatório; caso contrário, o modelo poderá ser substituído por outro mais refinado. Segundo Collinson todo o processo de construir modelos matemáticos e de confrontar as suas previsões com o mundo
real equivale ao que geralmente se entende por "método científico".
8.6.4
A modelação matemática e a resolução de problemas
Segundo Kerr e Maki, em João Filipe Matos [14], uma das fases que compõe
o ciclo da modelação matemática denota uma particular atenção ao cenário
pedagógico em que se possam desenvolver os processos de construção e manipulação de modelos. Estes autores consideram alguns passos intermédios
no processo de manipulação que se destinam a tornar os modelos matemáticos apropriados para a sala de aula, em particular quando se tem em vista
criar oportunidades para que os alunos utilizem determinadas ferramentas e
ideias matemáticas. Além disso, o processo de modelação é visto como um
conjunto de etapas evolutivas, que apenas idealmente se sucedem numa determinada ordem. Neste sentido, ele não deve ser assumido como um percurso
rígido; bem pelo contrário, uma ou mais etapas podem ser combinadas ou
mesmo omitidas em actividades a desenvolver na sala de aula. A 1a etapa do
processo consiste na identificação de um problema do mundo real ou de uma
área de estudo. Na 2a etapa, o problema é muitas vezes modificado e simplificado com vista a ser descrito em termos razoavelmente precisos e sucintos.
Esta descrição do problema constitui o chamado modelo real. Trata-se de um
modelo em virtude de ser uma simplificação, isto é, nem todos os aspetos da
88CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
situação real são incorporados na descrição. Quando o objectivo da modelação matemática é produzir um ambiente para a aplicação da Matemática
na sala de aula, é acrescentada uma outra etapa, que pode ser decisiva do
ponto de vista pedagógico. Nessa 3a etapa, um modelo real é ainda mais simplificado e apresentado num contexto que seja interessante e compreensível
para os alunos, tornando viável a aplicação de certos aspectos matemáticos
visados. Esta etapa conduz ao chamado modelo para sala de aula e a sua
pertinência decorre do facto de o modelo matemático ser construído com fins
didácticos. A 4a etapa é dedicada a conversão de aspectos e conceitos do
mundo real em símbolos e representações matemáticos. Trata-se, portanto
da obtenção do modelo matemático. Na 5a etapa são usadas ferramentas e
técnicas matemáticas para se obter conclusões com base no modelo encontrado. Por fim, na 6a etapa, estas conclusões são testadas através da sua
confrontação com o mundo real e é determinada a validade do modelo. Se
forem detectadas insuficiências do modelo em fornecer informações úteis a
cerca da realidade, o processo deve ser retomado no intuito de melhorar o
resultado final.
8.6.5
Ilustrações de tratamentos didácticos de aplicação
do conceito de derivada
Problemas geométricos
1. Um triângulo de lados a, b e 2r está inscrito numa semi-circunferência de
raio r. Determinar a e b para a área máxima do triângulo.
Resolução
Trata-se de um problema de optimização
Estratégia:
Figura 8.1:
8.6. INTRODUÇÃO À DIDÁCTICA DA ANÁLISE E DAS DERIVADAS89
Notemos em primeiro lugar que numa semi-circunferência de raio r é
possível inscrever diferentes triângulos, todos rectângulos. Por outro lado a
e b, os catetos, variam no intervalo ]0, 2r[.
Por outro lado, sendo S a área do triângulo, tem-se
S = ab/2
a + b2 = 4r2
2
Queremos determinar o valor máximo de S. Tem que se considerar S
como função só de a ou só de b. Seja S só função de a, sendo
√
b = 4r2 a2 − a2
√
√
Temos que S = 12 ab = 12 a 4r2 a2 − a2 = 12 4r2 a2 − a4
Provemos que S tem um máximo
8r2 a − 4a3
2r2 a − a3
√
S = √
=
.
2 4r2 a2 − a2
4r2 a2 − a2
√
S = 0 implica 2r2 a − a3 = 0 implica a = r 2
Por outro√
lado tem-se
0√
< a < r 2 implica a2 < 2r2 implica a3 < 2r2 a implica S > 0
r 2 < a < 2r√implica 2r2 < a2 implica 2r2 a < a3 implica S < 0
e então a = r 2 é um máximo local.
√
Conclusão:
O triângulo
de área máxima é aqulele para o qual a = r 2
√
√
e b = 4r2 a2 − a2 = r 2, isto é, o triângulo é isósceles.
2. Calcular o raio r da base e a altura h do cilindro de volume máximo
que pode ser inscrito numa esfera de raio R.
Resolução
Estratégia: Fazendo uma figura que represente uma secção da esfera e do
cilindro inscrito, feita por um plano contendo o eixo de simetria do cilindro,
observa-se que numa esfera podem estar inscritos diferentes cilindros, portanto r e h2 são variáveis. Para um dado cilindro são verificadas as seguintes
condições
V = πr2 h, 0 < h < 2R
h2
r2 +
= R2
4
onde V é o volume do cilindro. Trata-se de optimizar V .
90CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
h
R
h
2
r
Figura 8.2:
Para se determinar o máximo de V deve-se colocar V como função de
2
uma variável apenas (r ou h). Eliminando r, pois r2 = R2 − h2 , temos
V = πr2 = π(R2 −
h2
πh3
)h = πR2 h −
.
4
4
Provemos que V tem um ponto máximo:
3πh2
4
2
3πh
2R
V = 0⇒
= πR2 ⇒ h = √
4
3
2
4R
3πh2
2R
2
√
⇒
< πR2 ⇒ V > 0
⇒h <
0 < h<
3
4
3
2
2R
4R
3πh2
√ < h < 2R ⇒ H2 >
⇒
< πR2 ⇒ V < 0
3
4
3
V = πR2 −
2R
e portanto, h = √
é um máximo local
3
Conclusão: O cilindro de volume máximo é aquele para o qual h =
2R
er=√
.
3
2R
√
3
Problemas cinemáticos
1. De uma altura de 15m lança-se horizontalmente uma bola com a velocidade de 20m/s.
8.6. INTRODUÇÃO À DIDÁCTICA DA ANÁLISE E DAS DERIVADAS91
Considere g = 10m/s2 e despreze a resistência do ar.
1.1 Escreva as equações paramétricas do movimento.
1.2 Quanto tempo demora a queda? A que distância da vertical que passa
pelo ponto de lançamento cai a bola?
1.3 Qual a velocidade da bola imediatamente antes de atingir o solo?
Resolução
1.1 Escolhendo um sistema de eixos OXY, em que OY tem o sentido
descendente, fica:
x = x0 + v0x t
x = 0 + 20.t
⇔
1 2
y = y0 + v0y t + 2 gt
y = 0 + 0.t + 12 gt2
x = 20t
x = 20t
⇔
⇔
y = 12 .10.t2
y = 5t2
1.2 Substituindo y = 15m nas equações paramétricas, vem:
x = 20t
−
x = 35m
⇔
⇔
t = 1, 73s
t = 1, 7s
15 = 5t2
2
→
→ + v .−
→
−
→
1.3 Lembrando que −
v = vx −
u
vx + vy2 e sabendo
x
y uy e que v =
que
vx = x ⇔ vx = 20m.s−1
−2
vy = y ⇔ vy = 10t ⇔ vy = (10m.s
) (1, 73s) 17m.s−1 vem:
→
−
→
→ + 17−
v = 20−
u
uy (m.s−1 ) e v = 202 + 17, 32 26m.s−1
x
A velocidade da bola imediatamente antes de atingir o solo é de aproximadamente 26m.s−1
Problemas de máximos e mínimos (optimização de funções)
1. Um edifício vai ter janelas com a forma dum semicírculo sobreposto a um
rectângulo.
O perímetro da janela não pode exceder 4 metros. Determina o formato
óptimo da janela para obter a área máxima.
Resolução
A-Função a maximizar:
2
Área = Arectângulo + Asemı́−cı́rculo = 2xh + πx2
B-Expressão de A numa só variável:
Como o perímetro máximo é 4 metros temos:
92CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
Figura 8.3:
2x + 2h + πx = 4 ⇔ 2h = 4 − 2x − πx ⇔
⇔ h = 2 − x − π2 x
Logo, a área é dada por A = 2x 2 − x − π2 x + π2 x2 ou A = 4x−2x2 − π2 x2 ,
D = R+
C-Derivada e extremos: A´ = 4 − 4x − πx
4
Zero da derivada: 4 − 4x − πx = 0 ⇔ x = 4+π
≈ 0, 56
Quadro de monotonia:
x
A +
A´
0
x
+
M áx = A(
0,56
0
+∞
-
4
)
4+π
O valor do raio que torna a área máxima é x ≈ 0, 56m.
8
D-Dimensões óptimas da janela: largura 4+π
≈ 1, 12 (em metros).
0,56π
Altura total igual a h + x ≈ 2 − 2 ≈ 1, 12. Quer dizer que a solução
óptima tem a largura igual à altura total.
Problemas financeiros
1. Supondo que um mesmo capital inicial de 1000 contos é depositado numa
conta a prazo com uma taxa de juro nominal de 10%. Qual será o efeito do
8.6. INTRODUÇÃO À DIDÁCTICA DA ANÁLISE E DAS DERIVADAS93
Figura 8.4:
número de capitalizações no rendimento obtido, por exemplo, no final de 10
anos, nos seguintes casos:
a) Capitalização ao fim de um ano;
b) Ao fim de 3 meses;
c) Ao fim de um mês;
d) Ao fim de 1 dia;
e) Ao fim de uma hora;
f) Ao fim de um minuto.
Começando por estudar a primeira situação, isto é, supondo que os juros são capitalizados anualmente. Então, pode-se seguir o seguinte raciocínio:
Ao fim de 1 ano, terá na conta o capital inicial (1000) mais o juro vencido
(100), ou seja, um total de 1100 contos. Depois, no final do segundo ano, teremos o capital acumulado (1100) mais 10% deste valor (110), ou esja, 1210.
Portanto, será:
Capital inicial: 1000
1o ano : 1000 + 0, 1(1000) = 1000(1 + 0, 1)
2o ano : 1000(1 + 0, 1) + 0, 1 [ 1000(1 + 0, 1)] = 1000(1 + 0, 1)(1 + 0, 1) =
1000(1 + 0, 1)2
no ano :1000(1 + 0, 1)n
Passemos agora à segunda situação. Neste caso, os juros são contabilizados em cada trimestre. Portanto, no final de cada trimestre o depositante
tem direito a um quarto dos juros, isto é, a 2, 5% :
Capital inicial: 1000
94CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
1o trimestre :1000 + 0, 025(1000) = 1000(1 + 0, 025)
2o trimestre :1000(1+0, 025)+0, 025 [1000(1 + 0, 025)] = 1000(1+0, 025)2
3o trimestre: 1000(1 + 0, 025)3
1o ano : 1000(1 + 0, 025)4
2o ano : 1000(1 + 0, 025)8
no ano : 1000(1 + 0,1
)4n
4
Generalizando os resultados anteriores, podemos então obter um modelo
que permite determinar o saldo acumulado ao fim de n anos:
s = c(1 +
T kn
)
k
em que S é o saldo no fim de n anos, T é a taxa de juro anual (ou nominal)
e k é o número de capitalizações efectuadas ao longo de um ano (de acordo
com a periodicidade do depósito).
A construção de uma tabela será um passo decisivo para a comparação dos
saldos obtidos no final de 10 anos, em cada uma das modalidades, estando assumida em qualquer delas uma taxa nominal de 10 % (ver a tabela seguinte).
No Anos Anual Trimestral Mensal Diário
À hora Ao Minuto
1
1100,000 1103,813
1104,713 1105,156 1105,170 1105,171
2
1210,000 1218,403
1220,391 1221,369 1221,401 1221,403
3
1331,000 1344,889
1348,182 1349,803 1349,856 1349,859
4
1464,100 1484,506
1489,354 1491,743 1491,821 1491,821
5
1610,510 1638,616
1645,309 1648,608 1648,717 1648,721
6
1771,561 1808,726
1817,594 1821,969 1822,113 1822,119
7
1948,717 1996,495
2007,920 2013,560 2013,745 2013,753
8
2143,589 2203,757
2218,176 2225,297 2225,531 2225,541
9
2357,948 2432,535
2450,448 2459,300 2459,590 2459,603
10
2593,742 2685,064
2707,041 2717,910 2718,266 2718,282
O capital acumulado como função do número de anos,
para diferentes modalidades de capitalização dos juros
Como se observa pela tabela, não restam dúvidas de que quanto maior
for o número de capitalizações maior será o rendimento. Mas, além disso,
também se percebe que, à medida que vai diminuindo a periodicidade, também vai havendo menores diferenças em relação à ‘situação precedente’. Por
exemplo, não é significativamente distinto o que se obtém com a modalidade
"à hora" e com a modalidade "ao minuto". Já é mais saliente, porém, a
8.6. INTRODUÇÃO À DIDÁCTICA DA ANÁLISE E DAS DERIVADAS95
diferença entre a primeira situação, "ao ano", e a última, "ao minuto". Essa
diferença pode aliás ser perfeitamente reconhecida na representação gráfica
da evolução do saldo (ver o gráfico seguinte)
O gráfico permite comparar a evolução do saldo ao longo dos anos
nas duas modalidades "anual" e "minuto".
Como se pode verificar, a diferença entre as duas modalidades é tanto
maior quanto maior é o número de anos decorridos. Por outras palavras,
com o aumento do número de capitalizações é tanto mais vantajoso quanto
maior for a duração do número do investimento. Com efeito, ao fim de 1 ano,
há uma diferença de apenas cinco contos de rendimentos obtidos, ao passo
que após essa diferença já atinge cerca de 124 contos.
Por último, poderá colocar-se a seguinte questão: se, nas condições anteriores, continuássemos a fraccionar a periodicidade de capitalização dos juros,
o rendimento obtido também aumentaria indefinidamente?
É claro que esta questão se resume à procura do seguinte limite da função
saldo:
nk
nk
T
nT
= lim c 1 +
= c × enT
lim c 1 +
k→∞
k→∞
k
nk
Neste caso, em que n = 10 e T = 0, 1, podemos concluir que o limite seria
igual a 1000 × e = 1000 × 2, 718....,pelo que não vale a pena ter falsas ilusões
e esperar mais do que 2719 contos, mesmo que um destes dias apareça algum
banco a anunciar uma taxa de juro de “capitalização contínuo”.
96CAPÍTULO 8. ALGUNS ASPECTOS DA DIDÁCTICA DA MATEMÁTICA
Parte II
Estudo do programa de
Matemática do terceiro ciclo
97
8.7. INTRODUÇÃO
8.7
99
Introdução
A estrutura e o funcionamento do Ensino Secundário em Cabo Verde encontrase vinculada na Lei de Bases do Sistema Educativo e tem como um dos principais objectivos, desenvolver a capacidade de análise e despertar o espírito
de pesquisa e de investigação nos alunos.
Entendemos que a Matemática é uma das áreas que melhor contributo
pode dar quanto a execução desses objectivos.
Dentro das grandes metas e finalidades do Ensino Secundário em Cabo
Verde, consideremos as seguintes para o ensino da Matemática:
- Desenvolver a capacidade de comunicação;
- Desenvolver a capacidade de raciocínio;
- Desenvolver a capacidade de resolução de problemas;
- Desenvolver a capacidade de computação e estimação.
Portanto, podemos ver que o 3o ciclo é a fase onde se vai consolidar
a concretização das metas e das finalidades traçadas pela lei de bases do
sistema educativo.
Nesta parte do trabalho o objectivo primordial é estudar o programa de
matemática do 3o ciclo, em particular no que tange ao conteúdo, derivadas,
pois, vamos aqui caracterizar e analisar a abordagem proposta para um melhor esclarecimento do tema e posterior sugestões metodológicas.
Para o atingir desses objectivos pretendemos, fazer breves considerações
sobre o encadeamento proposta dos conteúdos mediante uma grelha de análise
do programa previamente construída, verificar a sequência, a pertinência e
adequação dos conteúdos propostos e finalmente fazer uma análise das orientações metodológicas propostas. Toda essa abordagem será feita tendo em
consideração o nível de desenvolvimento cognitivo e os dois tipos de abordagem matemática, a intuição e a lógica. Por isso a priori pretendemos
apresentar breves esclarecimentos sobre o nível de desenvolvimento cognitivo
segundo Devies [21] e sobre a intuição e lógica em Matemática.
Convêm salientar que, essa abordagem é feita mediante estudos teóricos
feitos, porém na realidade a autora ainda não teve oportunidades de leccionar
o 12o ano de escolaridade, a partir da qual se poderia fazer uma abordagem
mais objectiva e mais concreta sobre o assunto, pois é o nível de ensino do
qual esse conteúdo faz parte.
100
8.8
Níveis de desenvolvimento do domínio cognitivo segundo Devies
Segundo Davies em [21], a matriz apresentada proporciona uma precisão
maior, indica, de forma compacta, a totalidade dos objectivos de um programa e regista relações mútuas entre cada um dos comportamentos e os
elementos do conteúdo. Um tal retrato a duas dimensões tem significado
imediato como guia para professores, alunos e avaliadores.
Tal como se elaboram matrizes para unidades de ensino ou modelos que
poderão ser utilizados em diferentes unidades, também se constroem outras
que abarcam todo o programa de um ano ou mesmo de um ciclo de estudos.
É o caso da tabela que iremos apresentar de seguida, elaborada por Devies.
À medida que se progride no programa vão-se assinalando, na tabela
global, os comportamentos que são importantes para aquele segmento decompondo, na coluna dos conteúdos, os grandes temas e sub-temas assinalados, que não puderam ser enunciados com maior grau de especificidade numa
matriz de dimensões reduzidas.
Assim, a matriz geral dá origem a tantas matrizes mais específicas quantas o professor entender necessárias para orientar o ensino e a avaliação,
mantendo-se, sempre, a estrutura adoptada. Ver a tabela seguinte (Davies,1975:312
em António C. Ribeiro e Lucie C. Ribeiro [21]).
8.9. INTUIÇÃO E LÓGICA EM MATEMÁTICA
8.9
101
Intuição e Lógica em Matemática
A lógica e a intuição são elementos básicos fundamentais da Matemática.
Segundo Henri Poincaré é impossível estudar as obras de grandes matemáticos sem distinguir essas duas tendências opostas. Uns preocupam-se com a
lógica e outros deixam-se conduzir pela intuição. Muitas vezes se costuma
dizer que os que preocupam com a lógica são analistas e aos outros geómetras. Isso não impede que aqueles permaneçam analistas mesmo quando
trabalham em Geometria, enquanto que os outros não deixam de ser geómetras pelo facto da área de que se ocupam ser a Análise pura. É a própria
natureza do seu espírito que os faz lógicos ou intuitivos, e não podem pôr de
lado quando abordam um assunto novo.
Henri Poincaré, matemático, físico e filósofo da ciência, discute magistralmente esta questão. Na sua obra La Valeur de la Science [19], dá razão
aos filósofos quando afirma que "a lógica pura conduz-nos sempre, e apenas,
a tautologias; nada de novo poderá ser criado exclusivamente a partir dela;
ciência alguma pode nascer apenas da lógica." (Poincaré, 1970:32)
Neste sentido apresenta a seguinte tese: "para produzir aritmética,
tal como para produzir geometria, é necessário algo mais que lógica pura. E não temos outro termo para designar este algo senão
intuição." (Poincaré, 1970:32)
Assim a lógica não é suficiente, pois, a intuição deve conservar o seu papel
como complemento da lógica.
Sem a intuição deficilmente as pessoas conseguem aceder ao entendimento
da Matemática. Sem intuição, sobretudo, nunca viriam a ser capazes de
aplicar a Matemática.
Em Matemática, o lógico decompõe cada demonstração num número
muito grande de operações elementares;
A Análise pura coloca á disposição uma grande quantidade de procedimentos infalíveis. Abre vários caminhos através dos quais se possa embrenhar
com toda a confiança. A faculdade que permite escolher qual o caminho a
seguir é a intuição. Ela é necessária ao explorador para escolher a sua rota.
Em Matemática, a lógica chama-se Análise, e análise quer dizer divisão,
dissecação.
Existe várias espécies de intuição, vai-se referir aqui dois tipos de intuição,
a intuição do número puro, aquela de onde pode sair a Indução Matemática
rigorosa, a qual difere da intuição sensível de que é governada pela intuição.
É a intuição do número puro, das formas lógicas puras, que ilumina e
102
dirige os analistas, pois, lhes permite não só demonstrar mas também inventar.
E graças a ela que eles se apercebem do plano geral de um edifício lógico,
e isto, sem que os sentidos pareçam intervir.
A intuição sensível, em Matemática é o instrumento de invenção mais
vulgar.
Pode se dizer que os grandes analistas (lógicos) utilizam a intuição e
que geómetras (intuitivos) necessitam da lógica para fazer as suas demonstrações.
Assim, o matemático conclui que a lógica e a intuição tem, cada uma
delas, o seu papel. "Ambas se revelam indispensáveis. A lógica, que
é a única que nos pode fornecer a certeza, é o instrumento da
demonstração; a intuição é o instrumento da invenção." (Poincaré,
1970:37).
Segundo estudos recentes a tendência está geralmente dirigida para uma
abordagem mais intuitiva do que lógica, embora finalmente sente-se sempre
uma necessidade de se fazer uma formalização lógica.
CAPÍTULO 9
Uma análise do programa do
Ensino Secundário do 3o ciclo
em Cabo Verde
9.1
Grelha de análise do programa oficial de
Matemática do Ensino Secundário.
A análise que vamos fazer vai ser fundamentada nas duas secções anteriores.
103
104CAPÍTULO 9. UMA ANÁLISE DO PROGRAMA DO ENSINO SECUNDÁRIO DO 3O
9.2
Conclusões e recomendações
Em conclusão mediante a tabela de análise do programa é de notar que
a proposta para a leccionação dos conteúdos em destaque abrange na sua
maioria o nível de conhecimento, salvo em alguns casos em que abordagem
abrange o nível de compreensão e de aplicação e raras vezes o nível de Análise.
Portanto, parece que o programa propõe e os professores tem estado limitados a cumprir e por isso fornece informações para os alunos adquirirem o
conhecimento e poucas vezes conduzem os alunos a desenvolver o raciocínio
matemático pois para se chegar a tal nível tinham que estar conduzidos constantemente a aplicar os conhecimentos depois de compreendê-los e poder
fazer uma análise profunda do mesmo.
Podemos também notar através da tabela que o programa começa por
propor, nas suas orientações metodológicas, uma abordagem que parece ser
mais intuitiva do que lógica, embora é de referir que para alguns conteúdos
o programa propõe apenas uma abordagem lógica.
Pensamos também que quanto à derivada das funções logarítmicas e exponenciais em que o programa propõe não demonstração das fórmulas, está-se
a limitar o desenvolvimento cognitivo dos alunos, pois a esse nível de ensino
os alunos já podiam estar em condições de fazer algumas demonstrações do
tipo.
Constatamos também que, as orientações metodológicas propostas pelo
programa não são completas, pois, não há orientações para todos os conteúdos
apresentados pelo próprio programa.
Na parte seguinte do trabalho apresentaremos as nossas sugestões metodológicas levando em consideração as conclusões e recomendações deixadas aqui.
Parte III
Algumas sugestões
metodológicas
105
9.3. INTRODUÇÃO
9.3
107
Introdução
Depois de fazermos uma revisão teórica dos conteúdos e de fazermos uma
análise crítica do programa sobre o tema não podemos dar por concluído o
trabalho sem antes propor algumas sugestões metodológicas.
Não obstante a formanda não ter ainda leccionado esse conteúdo, consideramos que as sugestões metodológicas posteriormente apresentadas poderão
ser úteis para os professores que venham leccionar esses conteúdos.
Portanto o que vamos fazer nessa parte do trabalho é apresentar algumas
sugestões sobre a metodologia de ensino para alguns conteúdos específicos e
apresentar o software matemático "Estudo de funções", que também poderá
servir como um importante material didáctico de apoio para a leccionação de
alguns conteúdos e para a consolidação de outros. É de realçar que as nossas sugestões poderão servir como complemento às orientações metodológicas
fornecidas pelo programa oficial, isto é, as orientações do programa continuarão a ser úteis.
108
CAPÍTULO 10
Sugestões Metodológicas
109
110
CAPÍTULO 10. SUGESTÕES METODOLÓGICAS
CAPÍTULO 11
Conclusões
11.1
O que fizemos
O trabalho ora findo é o fruto de várias pesquisas bibliográficas cuidada e
orientada ainda que incompleta sobre a derivada, suas potencialidades e o seu
ensino no terceiro ciclo do Ensino Secundário em Cabo Verde. O que nós fizemos encontra-se dividida em três partes. Na primeira parte a fundamentação
teórica do tema com uma revisão profunda do conteúdo derivadas. Para cada
conteúdo tratado apresentamos exercícios de aplicação, o que poderá permitir
uma melhor compreensão do mesmo. Ainda na parte final apresentamos alguns aspectos da Didáctica da Matemática e em particular o da Didáctica da
Análise Matemática focando os conteúdos de limite e de convergência como
base fundamental para a compreensão do conteúdo derivadas, considerado
para muitos como um dos conteúdos fundamentais da Análise Matemática.
Na segunda parte do trabalho apresentamos uma análise crítica do programa do terceiro ciclo no que concerne ao conteúdo derivadas para finalmente na última parte deixar as nossas sugestões metodológicas.
Pensamos que com esse trabalho podemos dar a nossa contribuição para o
sucesso do ensino aprendizagem das derivadas em particular e da Matemática
em geral no terceiro ciclo do Ensino Secundário e não só, o que foi a nossa
motivação para a escolha do tema e um dos nossos principais objectivos.
Na execução desse trabalho acabamos por perceber a importância e a
complexidade do tema, razão pelo qual o trabalho ficou um pouco longo.
111
112
11.2
CAPÍTULO 11. CONCLUSÕES
As facilidades e os constrangimentos
Para a realização deste trabalho munimo-nos, em primeiro lugar, dos conhecimentos teóricos e práticos adquiridos nas componentes científica, psicopedagógica e metodológica adquiridos no curso. Os conhecimentos científicos
foram amplamente suficientes, permitindo o enquadramento da matéria - que
é intencionalmente elementar - em quadros superiores rigorosos e diversificados, tais como a derivação segundo Carathéodory, ou a derivação numérica.
Em relação a esta última matéria, aproveitamos para aprofundar o assunto,
visto termos ficado com algumas lacunas na formação a esse respeito.
Em relação à Didáctica da Matemática em geral, da Análise e das derivadas
em particular, não conseguimos um acesso satisfatório a trabalhos já realizados com um nível semelhante ao que propomos, pelo que muitos caminhos
tiveram que ser trilhados por nós próprios.
11.3
Ganhos conseguidos
Acreditamos que com esse trabalho conseguimos ganhos consideráveis, entre
os quais um conhecimento mais aprofundado sobre o conteúdo “derivadas”,
uma preparação mínima para a leccionação desse conteúdo no12o ano. A
execução desse trabalho também permitiu-nos o acesso a dois programas
matemáticos interessantes, o Scientific Workplace que nos permitiu uma
melhor estruturação do trabalho e o "estudo de funções" que servirá como
importante material didáctico pedagógico para ensino de qualquer conteúdo
relacionado com funções.
11.4
Perspectivas de trabalho futuro
Um trabalho desta natureza, por um lado é sempre inacabado pois, com o
amadurecimento da autora e com as mudanças rápidas que advêm à Didáctica, fruto das intensas investigações em curso no mundo inteiro, carece de
actualização constante; é inacabado também pois a tarefa pedagógica é exigente e não se compadece com receitas definitivas; finalmente, é inacabado
pois para nós, como profissionais do ensino da matemática – e portanto
constantes investigadores no campo da metodologia do ensino – constitui
o primeiro passo de um projecto mais ambicioso que terá como alvo toda
a Matemática do terceiro ciclo, procurando meios e métodos de ensino que
11.4. PERSPECTIVAS DE TRABALHO FUTURO
113
possam contribuir para o aumento da qualidade do ensino e diminuição do
insucesso na Matemática, o que são, afinal, os nossos objectivos últimos.
Baixar