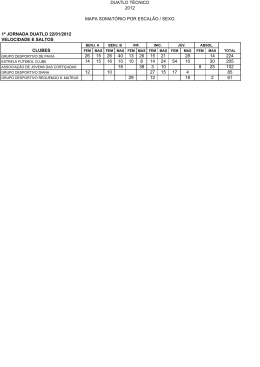
http://dx.doi.org/10.5540/DINCON.2011.001.1.0165 647 ESTUDO DA FORÇA ELETROMOTRIZ EM AMORTECEDORES INDUTIVOS Ricardo Velozo Marcondes de Oliveira 1, José Geraldo Trani Brandão 2, Durval Luiz Silva Ricciuli ,3 José Elias Tomazini 4, Rodrigo Pereira Nogueira 5, Carlos Sérgio Pivetta 6 1 FEG, Unesp Guaratinguetá, Brasil, [email protected] FEG, Unesp Guaratinguetá , Brasil, [email protected] 3 FEG, Unesp Guaratinguetá , Brasil, [email protected] 4 FEG, Unesp Guaratinguetá , Brasil, [email protected] 5 FEG, Unesp Guaratinguetá, Brasil, [email protected] 6 CETEC – ETEP Faculdades, [email protected] 2 RESUMO: Neste trabalho é desenvolvido um modelo matemático teórico que aproveita as vibrações observadas num amortecedor telescópico, para desenvolver uma força eletromotriz (fem), por meio de componentes eletromagnéticos, baseando-se na lei de Faraday. Podendo constituir um avanço nos estudos de veículos que se utilizam de eletricidade. Palavras-Chave: Engenharia. Amortecedor. Força princípio em diferentes simulações. Com os componentes de magnetismo no corpo do amortecedor funcionando de forma a atender a relação de variação de fluxo magnético necessária para a indução eletromagnética. eletromotriz. 1. OBJETIVO Analisar de forma ideal a força eletromotriz (fem) desenvolvida por indução num sistema amortecedor que apresenta componentes eletromagnéticos, através do desenvolvimento de um modelo matemático baseado na lei de Faraday. 2. INTRODUÇÃO Pela lei de Faraday-Lenz, cria-se uma corrente elétrica num solenóide quando há uma diferença na quantidade de linhas de campo magnético que o atravessam num dado intervalo de tempo, consequentemente, se há corrente há uma tensão. O cálculo dessa tensão, aqui denominada força eletromotriz, dado um circuito de caminho definido, e suas características, constituem o escopo deste trabalho visando uma premissa para o desenvolvimento de estudos de sistemas de amortecimento que se utilizam de indução. 2.1 Amortecedores Hoje, são mais difundidos os amortecedores telescópicos, conforme ilustrado em corte na Fig. 1 (e.g.[1]), onde o sistema de dissipação compreende uma fase de distensão e uma de compressão, que dinamicamente corresponde a um movimento constantemente relativo entre a haste interna e o tubo externo. Numa primeira análise e desconsiderando a força que uma indução causa, o trabalho em questão pretende utilizar este movimento para desenvolver uma fem, analisando em Figura 1 – Amortecedor telescópico 2.2 Indução eletromagnética Existem vários modos de se obterem correntes induzidas em um solenóide, sendo duas as mais usuais; - O solenóide pode mover-se como um todo em relação a um campo magnético B, de modo que o fluxo magnético através da área do circuito varie no decorrer do tempo. - O solenóide pode ser estacionário e indeformável, mas o campo magnético B, dirigido para a superfície é variável no tempo. A Força eletromotriz é a propriedade de um dispositivo, que tende a produzir corrente num circuito que tem um caminho específico para as cargas elétricas. Para efeito de cálculos, consideraremos aqui indução ideal, ou seja, tensão útil igual a fem. A intensidade da fem induzida, e consequentemente da corrente, são diretamente proporcionais estruturalmente ao tamanho e quantidade de solenóides que formam o circuito, a força do campo magnético que varia no mesmo e a taxa de variação. Sendo assim, tendo conhecimento das características do espectro gerado por imãs permanentes e da dinâmica de funcionamento dos amortecedores, a 648 Estudo de Amortecedores Regenerativos de Indução LIVEIRA, R.V.M.; BRANDÃO, J.G.T.; RICCIULI, D.L.S.;TOMAZINI, J.E; NOGUEIRA, R.P.; PIVETTA, C.S. segunda hipótese para indução descrita torna-se viável para prosseguimento. 3. DESENVOLVIMENTO Vz 3 0 N .m.a 2 zv 2 2 a z2 (7) 5/ 2 z diminui à medida que o tempo passa, para isto deve ser considerado como uma função em relação ao tempo, ou seja, z(t) = z0 – x(t), onde z0 é a distância inicial do centro do imã ao centro das espiras. Para uma função contínua, o fluxo e a fem apresentam aqui a seguinte função como ilustrada na Fig. 3 (e.g.[3]b). Figura 2 – Reações para dipolo magnético O fluxo do campo produzido pelo imã através de uma bobina de raio a formada por N espiras juntas é: N B.dS N Bz .dS (1) O sinal negativo se deve a direção relativa à origem, que é considerada no eixo da bobina e positiva para cima. Para pontos distantes da espira em comparação com seu raio a, a componente do campo é apresentada pela Eq. 2. Como é predominante no deslocamento aqui apresentado a desigualdade z >> a, esta equação será aplicada considerando inicialmente pontos relativamente distantes da espira conforme a Fig. 2 (e.g.[2]a). S Bz S 0 m 3z 2 1 4r 3 r 2 (2) O elemento diferencial de superfície dS, é a área do anel de raio y, seu valor é dS=2πy.dy. Substituindo-se a equação (2) na equação (1) tem-se: 0 N .m 2 3z 2 a 0 a ydy 2 y z 2 5 0 ydy 2 y z 2 3 Por seguinte integra-se a equação (3): 0 N .m.a 2 2 a2 z2 3 (3) (4) Quando várias bobinas são ligadas em série, a tensão total do circuito corresponde à somatória das tensões que cada uma apresenta, sendo assim, a fem de um circuito com várias bobinas ligadas em positivo é a soma das fem de cada uma. Figura 4 -Circuito para várias bobinas em série. Sendo assim, colocando-se um número definido de bobinas em série, considera-se que cada bobina é submetida ao campo magnético de um imã individualmente, e que a tensão proveniente de auto-indutância e indutância mútua podem ser desprezadas. A distância do centro de uma bobina ao centro da bobina subsequente também é considerada; esta distância é denominada por X, conforme a Fig. 4. Com isso, Vz passa a ser a soma das fem em cada bobina individualmente. Deste modo, temos a tensão para um conjunto de várias bobinas igualmente espaçadas: 3 N .m.a 2 V z 0 2 z v 2 2 a z 5/ 2 a zX 2 (z X )2 5/ 2 a z 2X 2 (z 2X )2 5/ 2 ... a z nX 2 (8) ( z nX ) 2 5/ 2 3.2 Desenvolvimento para vários imãs. (5) Resolvendo a derivada do fluxo temos: 3 N .m.a 2 .z d 0 5/ 2 dz 2 a2 z2 3.1 Associação de bobinas em série. n: número de bobinas em associação menos 1. Para a equação (4), aplica-se a lei de Faraday: d d dz Vz dt dz dt Figura 3 – Sinal do fluxo e da fem produzida. (6) Substituindo as expressões, tem-se a fem em função da velocidade e da distância em z, relativa ao centro da bobina. Para mais de um imã, separados por uma distância d afim de se induzir as bobinas, considera-se o campo magnético produzido por cada imã também de forma independente, ou seja, a indução que cada imã produz nas espiras é independe para cada imã e para cada espira. A distância do segundo imã até o centro da primeira espira será agora z’. Assim teremos outra tensão em fase induzida na bonina em questão. 649 Estudo de Amortecedores Regenerativos de Indução LIVEIRA, R.V.M.; BRANDÃO, J.G.T.; RICCIULI, D.L.S.;TOMAZINI, J.E; NOGUEIRA, R.P.; PIVETTA, C.S. 3 N .m.a 2 V ' z 0 2 z' v 2 2 a z ' 5/ 2 a z ' X 2 ( z ' X ) 2 5/ 2 a z '2 X 2 ( z '2 X ) 2 5/ 2 ... a z 'nX 2 ( z ' nX ) 2 (9) 5/ 2 Onde: z’: distância do centro do segundo imã até o centro da primeira bobina. z’ continua sujeito a regra de z’=z0’ – x(t). z0’: é a distância inicial que o imã em questão apresentará antes da solicitação do sistema. Para a continuação com uma quantidade maior de imãs no sistema tem-se: z: distância do primeiro imã à primeira bobina z’: distância do segundo imã à primeira bobina z’’: distância do terceiro imã à primeira bobina zn-1: distância do enésimo imã à primeira bobina Sendo z0n-1 >z0’’ >z0’ >z0 A fem total produzida deste modo por vários imãs, agindo sobre várias bobinas é: Vtotal Vz V ' z V ' ' z ... V n1 z 3.3 Sistema baseado em amortecedor telescópico. Para aproveitar o movimento do amortecedor, é considerado que o movimento relativo necessário entre os componentes eletromagnéticos corresponderão com as dimensões do amortecedor telescópico. A carcaça do amortecedor é considerada o componente estático, o qual fará a correlação com bobinas. A haste, que apresenta um constante movimento relativo à carcaça terá a correlação com os magnetos, criando o campo variável. Com as considerações acima, é possível analisar as características de indutância provenientes do movimento de um amortecedor. A fem modelada até agora é função de uma velocidade constante v, considerando que essa velocidade agora seria a velocidade relativa da haste de um amortecedor em relação à sua carcaça, passaria a ser assim uma velocidade variável. Para simular teoricamente, essa velocidade v passará a ser considerada a provinda de um movimento harmônico simples (MHS). (11) f: é a frequência média de trabalho do amortecedor. A: Amplitude do movimento, deslocamento máximo. Φo: Ângulo inicial do movimento. Adota-se zero. O deslocamento do conjunto também deve ser conhecido para sabermos a posição dos imãs em relação às espiras e adicioná-lo instantaneamente à equação de z, com isso: x(t) = A.cos (ωt) Para os cálculos teóricos: μ0 = 4π.10-7 H/m (permeabilidade magnética) m = 2,5 C.m (10) O sub-índice “z” em cada fem, deve-se ao fato do deslocamento do sistema ter sido considerado ao longo do eixo z, como é ilustrado na Figura 3. No equacionamento em questão, todas as bobinas são induzidas de forma dinâmica pelos imãs, toda corrente que é induzida em cada bobina se soma ao todo, fazendo com que a corrente induzida, e consequentemente a fem, passe a ser associação em série e em fase reforçando o fluxo. v(t) = - ω.A.sen(ω.t + Φo), e ω = 2πf Considere agora um sistema já montado, ilustrado conforme a Fig. 5, constituído de sete bobinas de 250 voltas cada (N= 250) e raio de 0,03m (a= 0,03), ligadas em série, com uma distância X de seus centros iguais a 0,015m; cada bobina apresenta um comprimento longitudinal de 0,01m, ou seja, a distância física entre as bobinas é de 0,005 m. Os componentes magnéticos permanentes serão em número de cinco e a distância d será de 0,015m, tendo o comprimento de cada um igual a 0,01m. As características do amortecedor correspondem a frequência de aproximadamente 80 ciclos por minuto e amplitude máxima total de 12cm, (+ ou – 0,06 m). (12) Figura 5 - Exemplo de uma montagem para os componentes em movimento telescópico. Esta configuração inicial servirá de padrão de comparação para a análise para diferentes configurações, a fim de verificar as influências de modificações no sistema. 3.4 Cálculos do modelo. μ0 = 4π.10-7 H/m; m = 2,5 C.m; a = 0,03 m; N = 250; X = 0,5 + (2 x 0,5)cm = (0,015 m) Como são utilizados no caso cinco imãs, considera-se z0, z0I, z0II, z0III, z0IV, e consequentemente. Vtotal Vz V ' z V ' ' z V ''' z V IV Onde, das dimensões definidas e baseadas na Figura 7, tem-se que d + 0,01m = 0,025m, sendo assim: z0 = -0,045m; z0I = -0,02m; z0II = 0,005m; z0III = 0,03m; z0IV,= 0,055m O número de bobinas é igual a 7. A fórmula para a fem produzida pelo imã mais próximo da primeira bobina, baseado na equação (9), passa a ser: 3 N .m.a 2 Vz 0 2 z v 2 2 a z z 4X ... a 2 (z 4X )2 5/ 2 5/ 2 a a zX 2 (z X )2 5/ 2 z 5X 2 (z 5X )2 5/ 2 a z 2X 2 (z 2X )2 a 5/ 2 z 6X 2 (z 6X )2 5/ 2 a z 3X 2 ( z 3X ) 2 5/ 2 ... (18) Para todas as cinco equações, z = z0 - x(t), e a velocidade é aquela relativa ao (MHS). x(t) = A.cos (ωt) e v(t) = - ω.A.sen(ω.t + Φo) 650 Estudo de Amortecedores Regenerativos de Indução LIVEIRA, R.V.M.; BRANDÃO, J.G.T.; RICCIULI, D.L.S.;TOMAZINI, J.E; NOGUEIRA, R.P.; PIVETTA, C.S. A = 0,06m; ω = 2πf; f = 80 cpm (1,3333 rad/s); Φo = 0 Deste modo z também é uma função do tempo juntamente da velocidade. Somando cada contribuição de cada imã, temos a tensão instantânea produzida, Vtotal. 4. RESULTADOS Com o auxilio do software wxMáxima e utilizando-se das fórmulas definidas no item 3.4, é montado o equacionamento e geradas as curvas da fem induzida. trabalha dinamicamente induzido por um campo magnético independente das espiras, o que apresenta um fator de erro inerente à adoção destas considerações. Portanto, neste trabalho foi verificado que a força eletromotriz desenvolvida no sistema apresenta valores que isoladamente são satisfatórios. Podendo o sinal apresentar características de corrente alternada, tornando em uma primeira análise, possível a retificação e utilização para regeneração de baterias, o que poderá favorecer a sustentabilidade energética de forma limpa. REFERÊNCIAS. Figura 6 – fem induzida conforme item 3.4 Modificando algumas características do sistema temos os seguintes resultados: (a) (b) Figura 7 – (a) fem induzida com as bobinas espaçadas em 0,008m. (b) fem induzida com a igual a 0,026m. (c) (d) Figura 8 – (c) fem induzida com imãs espaçados em d= 0,005m. (d) fem induzida com freqüência ampliada para 2 hertz. 5. CONCLUSÃO Verificou-se que a oscilação para o amortecedor é suficiente para atender à lei de Faraday, produzindo uma força eletromotriz que atinge valores expressivos, assim observa-se que os valores de pico de tensão podem variar consideravelmente, tais como as características do sinal. Contudo, reações entre as bobinas e entre os imãs foram desprezadas; a indutância mútua que pode existir entre as bobinas não foi considerada, porque todo o conjunto [1]PUB Harris,W, How Stuff Works,“Como funcionam as suspensões dos carros”, 2007, <http://carros.hsw.uol.com.br/suspensoes-dos-carros2.htm>. [2]PUB Santana, E. G., “Demonstração da Lei de Faraday (II)”, 2006, <http://www.fisica.ufs.br/CorpoDocente/egsantana/elecmagnet/induc cion/faraday/faraday.htm>. [3]LI Girdhar, P., “Practical machinery vibration analysis and predictive maintenance”, Newnes, 2004, pp. 29 – 57. [4]PUB Inovação tecnológica, “Suspensão regenerativa transforma amortecedor em gerador de energia”, 2009, http://www.inovacaotecnologica.com.br/noticias/noticia.php?artigo= suspensao-regenerativa-amortecedor-inteligente-gerarenergia&id=010170090218>. [5] Machado, K. D., “Teoria do eletromagnetismo”. 3.ed. Ponta Grossa: UEPG, v.1, 2007, 928p. [6] Machado, K. D., “Teoria do eletromagnetismo”. 2.ed. Ponta Grossa: UEPG, v.2, 2005, 901p. [7]PUB Righi, L. A., “Eletromagnetismo para Engenharia Elétrica. Eletrostática”. Universidade Federal de Santa Maria, 2011, PP. 1116. [8]PUB Goldemberg,C.;Lebensztajn,L;Pellini.E.L., “A evolução do carro elétrico”, PEA/EPUSP, 2005. [9]PUB Santana,E.G.2006,“Movimento de um imã em um tubo metálico vertical”, 2006. <http://www.fisica.ufs.br/CorpoDocente/egsantana/elecmagnet/induc cion/foucault1/foucault1.htm>. [10]PUB Santana,E.G.,“A espira. Aproximação:Pontos distantes da espira, Dipolo magnético”, 2006. <http://www.fisica.ufs.br/CorpoDocente/egsantana/elecmagnet/camp o_magnetico/espira/espira>. [11]PUB Chandler, D., “More Power From Bumps in the Road”, TechTalck Magazine, vol. 19, n° 15, 11 Feb, 2009, pp. 4.
Baixar