☰
Explorar
Assinar em
Inscrever-se
Envio
×
Baixar
Sem categoria
electrodomésticos descrição
silas vergilio CIC
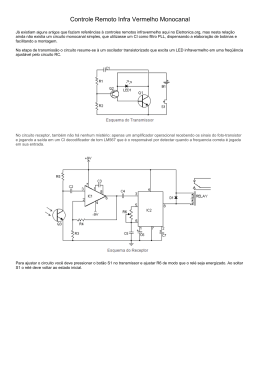
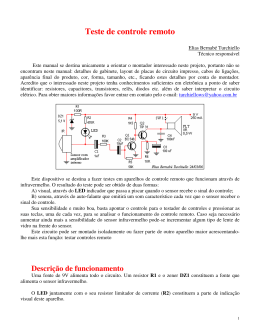
Controle Remoto Infra Vermelho Monocanal
sensor de presença.
autor 01
LANÇAMENTOS - MAHLE Aftermarket
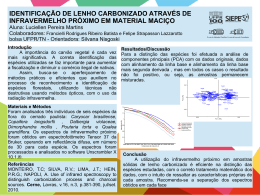
visualizar resumo expandido - PUC
(Arial, 16pt) Orientador/Colaboradores (Arial, 16pt)
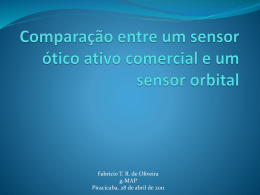
Comparação entre um sensor ótico ativo comercial e um sensor orbital
Teste de controle remoto - turchiellows.xpg.com.br