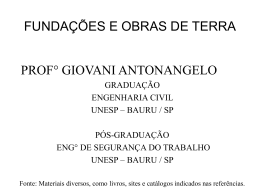
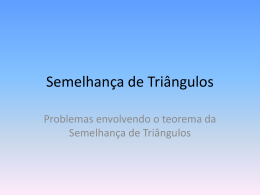
Energia e Sistema de Forças presente na Escavação das Estacas Escavadas e do Tipo Hélice Contínua e sua Relação com a Capacidade de Carga Carlos Medeiros Silva Embre Empresa Brasileira de Engenharia e Fundações Ltda., Brasília, Brasil, [email protected] André Luís Brasil Cavalcante Universidade de Brasília, Brasília, Brasil, [email protected] José Camapum de Carvalho Universidade de Brasília, Brasília, Brasil, [email protected] RESUMO: Quantificar a energia necessária para instalar ou escavar uma estaca, identificando a influência no desempenho dos estaqueamentos é um dos objetivos da engenharia de fundação e confunde-se com a sua história recente. Essa energia pode ser levantada identificando-se as forças envolvidas na escavação da estaca e de formulações propostas a partir da utilização da lei de conservação de energia, princípio fundamental da física clássica e da termodinâmica. Neste artigo, admitiu-se que toda energia gerada no processo é consumida pelas forças não conservativas envolvidas no balanço energético descrito pelo Princípio de Hamilton, que é especialmente valiosa quando se trata de sistemas com muitas variáveis, nos quais o entendimento e a resolução do sistema é um problema de difícil solução, como o encontrado na escavação de uma estaca. Apresentam-se, também, resultados de ensaios que comprovam que sob condições controladas a energia demandada para escavar uma estaca é diretamente proporcional a sua capacidade de carga. PALAVRAS-CHAVE: Energia, Princípio de Hamilton, Capacidade de Carga, Hélice Contínua. 1 INTRODUÇÃO A lei de conservação de energia é especialmente valiosa quando se trata de sistemas com muitas variáveis, tal como a escavação de uma estaca, onde o entendimento detalhado do sistema de forças é um problema de difícil solução. Partindo deste princípio, Van Impe (1998) propôs uma formulação para calcular a energia requerida durante a instalação das estacas de deslocamento, em especial, as estacas tipo Atlas, sugerindo que a energia de instalação, quando devidamente calibrada, pode ser um dos parâmetros utilizados para controlar a capacidade de carga dessas estacas. Bottiau et al. (1998) alertaram que apesar de ser possível, através de métodos semiempíricos, estimar a capacidade de carga das estacas com base em ensaios de campo, o controle no campo, todavia, em muitos casos, é muito difícil. Salientaram que nas estacas cravadas, a fórmula de condução e a avaliação do estaqueamento permitem comparar o nível da energia de cravação com o perfil do solo, controlando a capacidade de carga durante a execução. O trabalho mostrou que é possível associar ensaios de campo e capacidade de carga com a energia necessária para executar as estacas de deslocamento. Baxter (2009) mediu a energia necessária para executar estacas hélices contínua e de deslocamento em vários sítios, executadas com distintos equipamentos. Para quantificar esta energia utilizou a formulação proposta por Van Impe (1998) e verificou que a energia era variável e não estava diretamente relacionada à capacidade de carga. Entretanto, Silva & Camapum de Carvalho (2010) observaram que quando as estacas são executadas em uma obra, por um mesmo conjunto operador/máquina, onde o processo de execução é repetitivo e sistematizado, a capacidade de carga é diretamente proporcional a energia medida durante a execução das estacas e a medida nos ensaios de campo, no caso, o ensaio SPT. Silva (2011) apresentou detalhadamente o arcabouço metodológico que embasa a tese de que o controle das escavações mecanizadas, em particular, das estacas escavadas, realizado por meio da determinação da energia dispendida na execução da perfuração constitui um elemento de controle tecnológico capaz de oferecer maior segurança e menor risco às obras que as utilizam. Demostrou matematicamente que é possível a partir do princípio universal da conservação de energia quantificar a energia demandada durante a escavação de uma estaca e, comprovou a partir de provas de cargas que a capacidade de carga é proporcional a energia de instalação, quando o processo de escavação esta sistematizado. 2 ENERGIA COMO INSTRUMENTO DE CONTROLE DE ESTAQUEAMENTOS Para Silva (2011), um importante conceito que está diretamente relacionado com a energia é o trabalho realizado, uma grandeza escalar e, portanto, sem direção associada. A universalidade do conceito de energia torna possível, por exemplo, entender como a energia mecânica produzida por um motor é transformada em energia cinética e por sua vez dissipada por trabalho, sendo que no caso de uma estaca, por atrito parte da energia transforma-se em calor, de forma que mesmo com essas transformações energéticas, a energia total é uma constante. Fisicamente, o trabalho descreve o deslocamento que é realizado pela ação de uma força, sendo definido por Young & Freedman (2008), como o produto do deslocamento pela força paralela ao deslocamento. Outro importante princípio é o de Hamilton que parte do conceito da energia conservativa, em que a energia não pode ser criada ou destruída, apenas transformada. Para Silva (2011) é evidente que a Lei de conservação de energia, sintetizada no princípio de Hamilton, pode ser aplicada ao caso de carregamento de qualquer sistema, em equilíbrio estático ou dinâmico e particularmente ao sistema estaca–solo. Lembrou, ainda, da primeira lei da termodinâmica, que em qualquer transformação de energia, o valor absoluto se conserva, ou seja, a energia não pode ser criada ou destruída, apenas transformada, princípio aplicado por Aoki et al. (2007) para calcular o trabalho, a energia e a sua eficiência do ensaio dinâmico SPT. A engenharia de fundações está fundamentada nos ensaios de campo, que são basicamente medidas de energia, fato estudado por Odebrecht et al. (2007) e Robertson et al. (1992), que perceberam a necessidade de se padronizar a medida do número de golpes do ensaio SPT em termos de energia. Estes autores sugeriram uma nova abordagem e uma solução analítica para calcular a energia fornecida e a eficiência do sistema. Schnaid et al. (2009) alertam que as interpretações de resultados de testes de penetração dinâmica (SPT) são tradicionalmente realizadas com base em correlações empíricas, sendo esta uma crítica frequente a esses ensaios. Assim, propuseram um método de interpretação fundamentado na medida de energia do sistema, pois a partir deste valor, pode-se calcular a força dinâmica que representa a reação do solo à penetração do amostrador. Conhecendo esta força, Lobo et al. (2009) apresentaram um novo método de previsão de capacidade de carga de estacas desenvolvido com base na interpretação de resultados de ensaios SPT. Ao contrário de outras metodologias consagradas, de natureza essencialmente empírica, a nova abordagem teve fundamento em conceitos da dinâmica e faz uso dos princípios de conservação de energia envolvidos na cravação do amostrador SPT. Na prática, em grande número de obras, o engenheiro geotécnico define a campanha de ensaios e consequentemente a capacidade de carga do solo, essencialmente com base na experiência e no conhecimento que possui da região, deixando o controle e a confiabilidade que deverian estar associados ao projeto em segundo plano. Recentemente, Tsuha (2010), por meio dos resultados dos ensaios de modelagem física em centrífuga, verificou uma relação teórica entre torque de instalação durante a cravação e a capacidade de carga a tração das estacas hélices executadas em solos arenosos, sinalizando que existe uma relação entre o torque acumulado, a energia necessária para escavar uma estaca hélice contínua e sua capacidade de carga. Entretanto, Silva (2011) alertou que o torque, por ser dependente do impulso, só pode ser adotado como medida de controle se as velocidades angulares e de perfuração forem controladas durante a escavação, como ocorreu nos ensaios realizados por Tsuha (2010). 3 ENERGIA NECESSÁRIA ESCAVAR UMA ESTACA PARA Será abordado, inicialmente, o conceito de trabalho realizado para escavar uma estaca. Segundo Silva (2011), durante a execução de uma estaca escavada é imposto, por um sistema de forças variáveis (Fi) à ferramenta de escavação, um deslocamento da cota inicial da estaca (ci) para a cota final (cf) ao longo de uma trajetória (xi). Portanto, o trabalho (W) realizado para escavar uma estaca é um escalar definido pelo produto escalar destas duas grandezas, Fi e xi dado por: W lim xi 0 cf n F .x F .dx i i i i (1) ci onde,W é o trabalho [J], Fi é a força aplicada ao corpo [N], ∆xi é a trajetória do corpo [m], ci é a cota inicial do corpo [m] e cf é a cota final do corpo [m]. Analogamente, definiu o trabalho realizado pelo atrito e pela adesão, presentes durante o processo de escavação, que representam parcelas das forças não conservativas, ao longo deste mesmo deslocamento, dado por: Wc lim xi 0 n cf Fci .xi Fci .dx i (2) ci onde, Wc é o trabalho realizado pelas forças não conservativas [J] e Fci corresponde às forças não conservativas aplicadas ao corpo [N]. Observa-se que as forças exercem um papel fundamental na descrição do deslocamento da estaca. Deslocamento que também pode ser descrito em função de outro conceito físico, a energia, que é uma grandeza que se conserva em qualquer situação. Sendo a lei de conservação de energia, especialmente valiosa quando se trata de sistemas com muitas variáveis, nos quais o entendimento detalhado do sistema de forças é um problema de difícil solução, como no caso da escavação de uma estaca. Considerou-se, também, que a energia potencial depende basicamente da posição e configuração do sistema, no caso, a posição do helicóide ou do trado. Por exemplo, para levantar o trado de uma máquina hélice contínua, tem-se de realizar trabalho e, consequentemente, será consumida uma energia para movimentá-lo de um ponto a outro. Logo, o trabalho realizado pela força gravitacional, quando o trado muda a sua posição, em relação à superfície da Terra, é dado por: Wg Fg .y m.g. y 2 y1 (3) onde Wg é o trabalho da força da gravitacional [J], Fg é a força gravitacional ou peso [N], g é a aceleração da gravidade [m/s2], m é a massa do sistema [kg] e (y2 – y1) é a variação da posição georreferenciada [m]. Finalmente, utilizou-se o princípio de conservação de energia, sintetizado pelo princípio de Hamilton e, visivelmente presente na escavação de uma estaca. De forma similar ao caso da dinâmica de sistemas estruturais pode ser simplificado como descrito por Clough e Penzien, (1975) na forma: t2 t2 t1 t1 T V dt W dt 0 nc (4) onde, T é a energia cinética total [J], V é a energia potencial, incluindo a energia de deformação e a energia potencial de qualquer força conservativa externa [J] e Wnc é o trabalho efetuado pelas forças não conservativas que atuam no sistema, incluindo o amortecimento, o atrito e as forças externas [J]. O princípio de Hamilton que é apresentado em forma variacional, quando aplicado a um sistema qualquer em equilíbrio, estabelece que a variação de energia cinética e potencial (energias geradas pelo maquinário durante a escavação) ocorrida dentro do sistema, somada à variação do trabalho efetuado pelas forças não conservativas (atrito, adesão e calor) atuantes durante qualquer intervalo de tempo (t2 – t1) é igual a zero. Segundo Silva (2011), quando o sistema tratado é constituído por mais de uma partícula, a variação de energia interna do sistema pode ser medida através do trabalho total externo realizado sobre o sistema, ou seja: Wtotal K (5) onde, ∆K é a variação de energia interna do sistema [J] e Wtotal é o trabalho externo total realizado no sistema [J]. Logo, fica evidente que o princípio de Hamilton pode ser aplicado ao caso de carregamento de qualquer sistema, em equilíbrio estático ou dinâmico e, particularmente, ao sistema estaca–solo. Neste caso, é necessário medir o trabalho realizado por cada força aplicada ao sistema, estas forças foram identificadas e são apresentadas na Figura 1. Na Figura 1a apresenta-se o Bottom Drive CFA, sistema instalado na parte inferior da torre e presente na maioria das máquinas brasileiras. Este foi o sistema estudado nesta pesquisa, possui três forças envolvidas, a gravitacional (peso do sistema), a força de rotação e uma terceira exercida por um pistão hidráulico conhecida como força descendente. Na Figura 1b, observa-se o sistema Continuous Flight Auger (CFA) na parte superior da torre, onde se identificam as forças gravitacional e de rotação. Neste caso para aplicação da força descendente utiliza-se um sistema de cabos auxiliares, operação dificilmente incorporada à rotina das obras de fundações, portanto, não representada na Figura 1b. (a) (b) Figura 1. Sistema de forças, (a) Bottom Drive CFA e (b) Continuous Flight Auger CFA (Silva, 2011). As energias mecânicas produzidas pelos maquinários apresentados na Figura 1 são transformadas em energias, cinética e potencial, e são aplicadas ao sistema por meio de forças externas. Energias que são dissipadas pelo trabalho das forças não conservativas, ou seja, ao final do processo de escavação toda a energia do sistema é transformada em energia térmica e sonora. Segundo Silva (2011), analisando o sistema apresentado na Figura 1,verifica-se que a energia necessária para escavar uma estaca e consumida pelas forças não conservativas, são dissipadas: i. na energia gasta durante a escavação na desestruturação do solo, na compactação ou amolgamento do solo entre as hélices e na densificação e amolgamento do maciço na interface solo-estaca; ii. no atrito e/ou adesão entre o helicóide e o solo; iii. no atrito e/ou adesão residuais entre o fuste da estaca e o conjunto helicóide/solo escavado; iv. pelas perdas do sistema, representado pelo calor gerado pelo maquinário. Logo, de acordo com Silva (2011) para determinar o somatório destes trabalhos durante a escavação de uma estaca, seria necessário conhecer a tensão em cada ponto do helicóide no contato fuste da estaca e conjunto helicóide/solo transportado e a energia consumida durante a escavação. Consequentemente, integrando-se estas tensões por unidade de área e a energia por unidade de volume durante o tempo gasto na perfuração, obter-se-ia a energia consumida pelas forças não conservativas. Esta energia equivale ao trabalho realizado pelo sistema de forças aplicado ao helicóide e está representada na Figura 1. Entretanto, essas grandezas são de difícil determinação, devido à complexidade do processo energético existente durante a escavação de uma estaca. O sistema, representado pela Figura 1, é constituído por variáveis que dificilmente poderão ser isoladas. Mas, partindo-se do conceito físico da conservação de energia, representado pela Eq. (5), de que a variação de energia interna do sistema durante a escavação da estaca é igual à somatória do trabalho externo realizado pelas forças aplicadas ao sistema, pode-se quantificar a energia ou o trabalho necessário para escavar a estaca. Fisicamente, o fenômeno é similar ao de transferência de energia descrito por Rabin et al. (1991 e 1995). Os autores propuseram uma formulação analítica para predizer a condução de calor transiente em um meio semi-infinito (solo), e descrever a transferência de calor em estacas helicoidais para fundações de torre de transmissão de energia, levando em consideração a existência constante de uma fonte de calor gerada pelo sistema de transmissão de energia, a variação de temperatura do solo e as forças geradas por essas variações, sendo desprezada a energia sonora. A partir do modelo idealizado, apresentamse as Equações que regem o problema. Partiu-se do sistema de transferência de calor presente na execução de uma estaca helicoidal, apresentado esquematicamente na Figura 2. O modelo teórico é fundamentado nos seguintes pressupostos simplificados com relação ao solo: i. O modelo de transferência de calor no solo considera o sistema multifásico (sólido, líquido e gasoso). Considera também os efeitos presentes no processo de acoplamento de calor e de transferência de massa em solos. ii. O solo é assumido como isotrópico, com propriedades térmicas constantes. iii. O gradiente de temperatura na direção tangencial é negligenciada, e o modelo é considerado transiente, de duas dimensões (2D) e axissimétrico. 2r Zb Transferência de energia Ѳ Rins Solo Ts z, r ,0 Ts 0 z Com base nas hipóteses propostas, a equação que rege a transferência de calor no solo, em coordenadas cilíndricas, é dada por: (6) (7) As condições de contorno do sistema são: Ts z,0, t 0 r Ts z 0 , r , t 0 z Ts z, Rins , t qsup r T k s s z 0 , r , t q sup r (8a) (8b) (8c) (8d) onde, T é a temperatura [oC], t é o tempo [s], Rins é a metade da distância entre eixos de duas estacas hélices vizinhas, ks é a condutividade térmica [W.m-1 oC-1], qsup é o fluxo de calor na superfície do sistema [W.m-2], z é a profundidade [m]. Basicamente, a energia do sistema, representada pela Eq. (6), considera a variação de temperatura ao longo da profundidade e do raio em um determinado tempo. A Eq. (6), representada em coordenadas cilíndricas, é parabólica e transiente, com o termo de primeira ordem comandando os processos de transferência de calor advectivos, associados a mudança de temperatura em função da condutividade térmica e os de segunda ordem comandam os processos difusivos, associados aos gradientes de temperatura. Em condição estacionária, o termo que depende do tempo tende a zero, e assim é atingida uma situação de equilíbrio. A energia é obtida pela integração volumétrica em função da variação da temperatura do solo. Consequentemente, a energia total do sistema é obtida por: E st s C ps Ts r , z, t Ts r , z,0dV Figura 2. Descrição do Sistema Helicoidal. 2Ts 1 Ts 2Ts Ts r r t r 2 z 2 A condição inicial do sistema é: (9) V onde, Est é a energia total do Sistema [J], ρs é a massa específica do solo [kg.m-3],Cps é o calor específico do solo [J.m-3 oC-1], V é o volume de controle. O problema apresentado de transferência transiente de calor no solo é bidimencional (2D) e axissimétrico, e pode ser resolvido, por exemplo, numericamente por diferenças finitas. Entretanto, Silva (2011) considerou o princípio de Hamilton e determinou a variação de energia mecânica produzida pelo sistema, partindo do princípio que a energia do sistema apresentado é conservativa, ou seja, a energia não pode ser criada ou destruída, apenas transformada, conceito representado pelas Eqs. (4) e (5). Consequentemente, a variação de energia térmica total do sistema Est é igual à energia mecânica aplicada ao sistema, isto é, ao trabalho realizado pelas forças externas aplicadas ao sistema (WR) no caso, as forças aplicadas ao helicóide durante a escavação de uma estaca, dado por: E st WR WR mhc .g.zi Fdi .zi Fi .r. i i i (11) i (13) Neste caso, pode-se reescrever a Eq. (12) na forma: zb m.2 0 0 WR N di .dz F .r.d i (14) Integrando a Eq. (14) e utilizando valores médios para as variáveis, segue que: WR N d .zb m.2r.F Est (15) Ou ainda, para um deslocamento qualquer: WRi N di .zi mi .2r.Fi Esti (16) O termo mi.2r.Fi, que aparece na Eq. (16) pode ser reescrito, em termos de velocidade angular (ni), velocidade vertical do trado (vi) e o torque aplicado (Mi), durante um dado tempo (ti) e um deslocamento (zi) qualquer: mi .2r.Fi ni M i .z i vi (17) onde, ou ainda por, zb WR mhc .g.dz Fdi .dz 0 N di mhc .g Fdi (10) Mas, para quantificar o trabalho é necessário conhecer as forças externas que são aplicadas ao sistema, forças que foram identificadas na Figura 2. Logo, conhecendo o torque aplicado ao helicóide e o braço de alavanca, determinase a força tangencial aplicada ao helicóide, e conhecendo-se a velocidade angular e de perfuração do helicóide, o percurso pode ser determinado e, consequentemente, o trabalho da força tangencial, que é o produto escalar desta força pelo deslocamento ao longo da profundidade. Finalmente, o trabalho total realizado pelas forças externas é a somatória do trabalho realizado pela força tangente ao helicóide, mais o trabalho realizado pela força gravitacional e o trabalho realizado pela força descendente que é igual à energia mecânica aplicada ao helicóide. Portanto, o trabalho é uma grandeza escalar representado por (Silva, 2011): zb do sistema de escavação [kg], r é o raio da estaca hélice [m], g é a aceleração da gravidade [m/s2], zb é o comprimento da estaca [m], Fdi é a força descendente aplicada ao helicóide [N], m é o número de voltas do helicóide durante a escavação. Silva (2011) demostrou a partir da Eq. (12), que se pode estimar a energia necessária para escavar ou instalar uma estaca. De fato o que fez foi aplicar o modelo para levantar a energia de instalação de uma estaca de deslocamento a partir da Eq. (12). Considerando que, a força do impulso vertical (Ndi) é definida como a soma da força gravitacional (peso do sistema) com a força descendente, pode-se escrever: 0 m.2 Fi .r.d (12) 0 onde, WR é o trabalho realizado ou a energia necessária para escavar uma estaca [J], Fi é a força aplicada no helicóide [N], mhc é a massa mi 2 ti M i r.Fi z vi i ti Substituindo a Eq. (17) na Eq. (16), ni (18a) (18b). (18c) segue que: WRi N di .zi ni .M i .zi Esti vi (19) Dividindo todos os termos da Eq. (19), pelo volume escavado da estaca, isto é, zi e considerando a força de impulso constante, temse que, a energia de instalação por unidade de volume é dada por: E s E sti .zi N di .vi ni .M i .vi (20) onde, Es é a energia de instalação por unidade de volume [J/m³], Nd é a força de impulsão vertical [N], vi é a velocidade vertical do trado [m/s], ni é a velocidade angular [1/s], Mi é o torque aplicado [N.m], Ω é a área da projeção plana do trado [m²]. A Eq. (20) está em conformidade ao estabelecido por Van Impe (1998), para a energia por unidade de volume para escavar uma estaca. Observa-se que, a formulação proposta pela Eq. (12), apresenta-se consistente do ponto de vista físico, conduzindo a valores próximos aos obtidos pela proposta de Van Impe (Eq. (20)), que considera em sua abordagem valores médios. Fato esperado, pois, as duas, fisicamente, partem do princípio universal da conversação de energia representado pela Eq. (4), onde em um sistema fechado, como o existente durante a escavação de uma estaca, o trabalho total realizado pelas forças externas deve ser igual variação de energia. 4 ENERGIA CARGA E CAPACIDADE DE Durante a execução de um estaqueamento, busca-se atingir uma superfície resistente onde as bases das estacas são assentes, superfície que deve atender geotecnicamente e estruturalmente os estados limites últimos e de utilização (Silva, 2011). A localização da superfície resistente depende da formação geológico-geotécnica do maciço. Sua detecção durante a execução de um estaqueamento por cravação se dá por meio do controle da nega ou do repique elástico, já no escavado tal detecção torna-se mais difícil. No método executivo tradicional, a profundidade de escavação é previamente fixada pelo projetista e dificilmente é alterada durante a execução. No entanto, em um perfil com geologia estrutural dobrada, tal prática pode conduzir a erros, principalmente quando o solo não amostrado, solo entre furos de sondagem, apresenta-se na zona de depressão da dobra, conduzindo a baixas resistências até a cota de assentamento prevista em projeto. Quando a dobra se inverte muitas vezes a perfuratriz não consegue atingir a profundidade desejada fazendo com que persista certa dúvida quanto à qualidade da perfuração. Entretanto, Silva & Camapum de Carvalho (2010) perceberam que o trabalho realizado em cada estaca do estaqueamento executada por um determinado processo do conjunto máquina/operador, quando agrupados formam uma população, que se enquadra em uma distribuição normal de probabilidade. Isso permitiu que os autores montassem critérios de aceitação em função da média e do desvio padrão da população (energias demandadas por cada estaca) ou de uma amostra coletada desta população, e assim, batizaram a metodologia de SCCAP. A metodologia busca minimizar o risco por meio do controle de energia durante o processo de escavação e execução do estaqueamento. A metodologia foi introduzida pelos autores no sistema de monitoramento das estacas escavadas e hélices contínuas permitindo medir, através da Eq. (12), o trabalho ou a energia necessária para escavar cada estaca do estaqueamento. Silva (2011) alertou que o comportamento final da estaca ainda dependerá da qualidade da concretagem, por exemplo, a pressão de injeção do concreto, dependendo do tipo de solo, poderá ter grande influência no comportamento da estaca. Na Figura 3, apresentam-se os resultados obtidos por Silva (2011), durante a execução de sete estacas na Orla do Lago Paranoá de Brasília. Pode-se verificar que a energia medida em cada estaca é diretamente proporcional a sua capacidade de carga. Na Tabela 1 apresentamse as características geométricas e a energia demandada necessária para executar cada estaca. Tabela 1. Características geométricas das estacas ensaiadas estaticamente, modificado de Silva (2011). Pressão CompriEnergia média do Diâmetro Estaca mento total concreto (cm) (m) (MJ) (kPa) E110BA 17,12 100 42 9,64 EPC1BB 15,12 100 42 10,60 TC2BB 12,80 0-75 53 13,18 E55AA 14,24 25-100 37 7,06 EPC1C GE 24C EE6B 10,80 20,92 20,08 50 0-50 100 42 52 54 4,73 13,36 14,27 Figura 3. Capacidade de carga última vesus trabalho realizado (Silva, 2011). 5 CONCLUSÃO Os resultados apresentados conduzem a conclusão que é possível determinar a energia necessária para escavar uma estaca a partir do princípio universal de conservação de energia. Verificou-se também que sob condições controladas, em estaqueamentos executados com o mesmo conjunto operador/máquina, a energia demandada durante a escavação de uma estaca é diretamente proporcional a sua capacidade de carga, viabilizando o controle do estaqueamento através do controle da energia de instalação da estaca, como proposto pela metodologia SCCAP. AGRADECIMENTOS Os autores agradecem a Empresa Sul Americana de Fundações S/A e a Embre Engenharia pela disponibilização dos dados aqui analisados. REFERÊNCIAS Baxter, D.J. (2009) Innovation in the design of continuous flight auger and bored displacement piles. Departamento de Engenharia Civil e Construção Engenharia da Universidade Loughborough, Leicestershire, UK. 228 p. Bottiau, M.; Meyus, I. & Callens, S. (1998) Screwin energy measurement for on-site control of the bearing capacity Omega piles. Proceedings of the 7th International Conference on Piling and Deep Foundations, Vienna, Balkema. Clough, R.W. & Penzien, J. (1975). Dynamics of Structures, 1st Ed., New York-NW, McGrawHill, 634 p. Lobo, B. O.; Schnaid, F.; Odebrecht, E.; Rocha, M. M. (2009) Previsão de Capacidade de Carga de Estacas Através de Conceitos de Transferência de Energia no SPT. Geotecnia – Revista Luso Brasileira de Geotecnia, nº 115, p. 5-20. Silva, C.M. & Camapum de Carvalho, J. (2010) Monitoramento e Controle de Qualidade dos Estaqueamentos Tipo Hélice Conínua Durante a Execução da Obra. XV Congresso Brasileiro de Mecânica dos Solos e Engenharia Geotécnica, Gramado: ABMS, v. 1, p. 1-12. Silva, C.M. (2011). Energia e Confiabilidade Aplicadas aos Estaqueamentos Tipo Hélice Contínua. Tese de Doutorado, Publicação G.TD 070/11, Departamento de Engenharia Civil e Ambiental, Universidade de Brasília, Brasília, DF, 303p. Tshua, C.H.C. & Aoki, N. (2010) Relationship between installation torque and uplift capacity of deep helical piles in sand. Canadian Geotechnical Journal, v. 47, p. 635-647. Young, H.D. & Freedman, R.A. (2008) Sears and Zemansky's university physics. 12th ed., 1598 p. Van Impe, W.F., (1998). Considerations on the auger pile design, Deep Foundations on Bored and Auger Piles, Balkema, v. 1, pp. 193-218. Schnaid, F. ; Odebrecht, E.; L., B. O.; Rocha, M.M. (2009) Discussion of SPT Hammer Energy Ratio versus Drop Height by T. Leslie Youd, Hannah W. Bartholomew, and Jamison H. Steidl. Journal of Geotechnical and Geoenvironmental Engineering, v. 135, p. 1777-1778. Odebrecht, E.; Schnaid, F.; Rocha, M.M. & Bernardes, G.P. (2007) Discussion of Energy Efficiency for Standard Penetration Tests. Journal of Geotechnical and Geoenvironmental Engineering, v. 133, p. 486-490. Robertson, P.K.; Woeller, D.J. & Addo, K.O. (1992) Standard penetration test energy measurements using a system based on the personal computer. Canadian Geotechnical Journal, v. 29, No. 4, p. 551-557.
Baixar