Campus de Ilha Solteira
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
“Formulação do Controle Preventivo em Sistemas de
Distribuição de Energia Elétrica Baseada na Lógica Fuzzy e
Redes Neurais”
MAURO DE SOUZA TONELLI NETO
Orientador: Prof. Dr. Carlos Roberto Minussi
Dissertação apresentada à Faculdade de
Engenharia - UNESP – Campus de Ilha
Solteira, para obtenção do título de
Mestre em Engenharia Elétrica.
Área de Conhecimento: Automação.
Ilha Solteira – SP
Março/2012
FICHA CATALOGRÁFICA
Elaborada pela Seção Técnica de Aquisição e Tratamento da Informação
Serviço Técnico de Biblioteca e Documentação da UNESP - Ilha Solteira.
T664f
Tonelli Neto, Mauro de Souza.
Formulação do controle preventivo em sistemas de distribuição de energia elétrica
baseada na lógica fuzzy e redes neurais / Mauro de Souza Tonelli Neto. -- Ilha Solteira :
[s.n.], 2012
137 f. : il.
Dissertação (mestrado) - Universidade Estadual Paulista. Faculdade de Engenharia de
Ilha Solteira. Área de conhecimento: Automação, 2012
Orientador: Carlos Roberto Minussi
Inclui bibliografia
1. Transformada Wavelet. 2. Lógica Fuzzy. 3. Redes neurais (Computação).
4. Rede neural Fuzzy ARTMAP. 5. Diagnóstico de distúrbios. 6. Subestações elétricas Automação. 7. Sistemas de energia elétrica - Distribuição.
AGRADECIMENTOS
Primeiramente, agradeço a Deus por ter me concedido o dom da vida, pela força, luz e
oportunidades dadas a mim para que conseguisse alcançar meus objetivos.
Ao meu orientador Prof. Dr. Carlos Roberto Minussi, por depositar em mim a confiança
de realização desta pesquisa, pela atenção, dedicação, empenho e por contribuir para o meu
aprendizado desde o 2º ano de graduação. Pelo amigo e pai que se mostrou, sempre com
palavras incentivadoras a cada vitória, e palavras consoladoras em cada tropeço.
Aos meus pais, Mauro Júnior e Maria Abadia, que sempre estiveram ao meu lado dando
total apoio e incentivo em minha busca pela realização de meus sonhos. Às minhas irmãs,
Jackeline e Karolinne, pelo carinho e apoio. À minha namorada Virgínia Utida, pelo amor,
incentivo, paciência e compreensão.
A todos os meus amigos que sempre estiveram ao meu lado. Em especial, José
Guilherme Decanini, Thiago Dolacio, Vander Prado, e Ana Cláudia Barros, pela força, apoio
e amizade verdadeira.
A Fapesp pelo auxílio financeiro concedido, através de uma bolsa de estudos e reserva
técnica, que permitiu que eu pudesse me dedicar exclusivamente ao desenvolvimento desta
pesquisa.
RESUMO
Esta pesquisa tem por objetivo o desenvolvimento de um sistema inteligente que realize
o controle preventivo em sistemas de distribuição de energia elétrica. Trata-se de um
procedimento para diagnosticar distúrbios possam provocar danos em componentes do
sistema e, principalmente, a interrupção do fornecimento de energia aos consumidores. Este
sistema inteligente será desenvolvido baseando-se no emprego da transformada wavelet,
lógica fuzzy e redes neurais artificiais, em especial uma arquitetura da família ART (Adaptive
Resonance Theory), a rede neural Fuzzy ARTMAP. Por ser uma arquitetura estável e plástica,
esta permite a inclusão do módulo do treinamento continuado, o qual possibilita a extração do
conhecimento sem a necessidade de reiniciar o processo de treinamento com a inclusão de
novos padrões, diferentemente do que ocorre com a maioria das redes neurais. Este recurso
possibilita usar um conjunto reduzido de padrões na fase de treinamento e, na medida em que
forem realizadas as análises (aplicação), a extração do conhecimento é continuada, ou seja,
trata-se de um sistema que busca o aperfeiçoamento com o passar o tempo. O sistema irá
contemplar as principais anormalidades caracterizadas por distúrbios de tensão, curtoscircuitos e faltas de alta impedância. Por conseguinte, o objetivo refere-se ao desenvolvimento
de um modelo embrionário capaz de incorporar permanentemente inovações com o propósito
de torná-lo um sistema de inferência mais eficiente.
Palavras-chave: Transformada wavelet. Lógica fuzzy. Rede neural Fuzzy ARTMAP.
Diagnóstico de distúrbios. Automação de subestações. Sistema de distribuição.
ABSTRACT
This project aims to develop an intelligent system that performs the preventive control
in electric power distribution systems. It is a procedure to disturbances diagnosis that can
potentially cause damage to system’s components and, particularly, the interruption of electric
power supply to consumers. This intelligent system is based on wavelet transform, fuzzy logic
and artificial neural networks, in special the ART (Adaptive resonance Theory) family
architecture, i.e., the Fuzzy ARTMAP. Due to the stability and plasticity characteristics, this
architecture enables the introduction of the continuous training module, which allows the
knowledge extraction without the need to restart the training process when a new training
pattern is included, unlike what happens in most neural networks. Thus, it is possible to use a
reduced set of patterns on the training phase and, as the analyses are performed, the extraction
of the knowledge is continuous, i.e., a system that seeks to improve over time. The system
will introduce the main disorders characterized by voltage disturbances, short-circuit faults
and high impedance faults. Therefore, it deals with a methodology that can permanently
incorporate new information to become an efficient inference system.
Keywords: Wavelet transform. Fuzzy logic. Fuzzy ARTMAP neural network. Disturbances
diagnosis. Substations automation. Power distribution system.
Sumário
1
INTRODUÇÃO
17
1.1
Objetivo da Pesquisa
18
1.2
Justificativa
19
1.3
Estrutura do Texto
20
2
ESTADO DA ARTE
21
2.1
Comentários
24
3
SUBESTAÇÕES DE ENERGIA ELÉTRICA
25
3.1
Configurações de Subestações
26
3.2
Automação do Sistema de Distribuição de Energia Elétrica
27
3.3
Distúrbios em Sistemas de Distribuição de Energia Elétrica
28
3.3.1
Distúrbios de Tensão
28
3.3.2
Curtos-Circuitos
30
3.3.3
Faltas de Alta Impedância
33
3.4
Simulações de Distúrbios
34
3.4.1
Distúrbios de tensão
35
3.4.2
Curtos-Circuitos
36
3.4.3
Faltas de Alta Impedância
38
3.5
Comentários
39
4
MÉTODO PROPOSTO
41
4.1
Formulação do Controle Preventivo
41
4.2
Método Para a Formulação do Controle Preventivo
42
4.3
Comentários
44
5
TRANSFORMADA WAVELET
45
5.1
Transformada de Fourier com Janelamento
45
5.2
Transformada Wavelet Contínua
46
5.3
Transformada Wavelet Discreta
47
5.4
Análise Multirresolução
48
5.5
Famílias de Wavelets
50
5.5.1
Família Haar
51
5.5.2
Família Daubechies
52
5.5.3
Família Symlet
53
5.5.4
Família Coiflet
54
5.6
Entropia
54
5.7
Energia
55
5.8
Comentários
55
6
LÓGICA FUZZY
57
6.1
Teoria de Conjuntos Clássica
57
6.2
Teoria de Conjutos Fuzzy
58
6.2.1
União (Fuzzy OR)
59
6.2.2
Interseção (Fuzzy AND)
60
6.2.3
Complemento (Fuzzy NOT)
60
6.3
Funções de Pertinência
61
6.3.1
Triangular
62
6.3.2
Trapezoidal
62
6.3.3
Gaussiana
63
6.4
Sistema Fuzzy
64
6.4.1
Fuzzyficação
65
6.4.2
Base de Regras
65
6.4.3
Inferência Fuzzy
65
6.4.4
Defuzzyficação
66
6.5
Comentários
67
7
REDES NEURAIS ARTIFICIAIS
69
7.1
Rede Neural Fuzzy ART
71
7.1.1
Dados de Entrada
72
7.1.2
Parâmetros
73
7.1.3
Inicialização dos Pesos
73
7.1.4
Escolha da Categoria
73
7.1.5
Ressonância ou Reset
74
7.1.6
Aprendizado
75
7.2
Rede Neural Fuzzy ARTMAP
75
7.2.1
Dados de Entrada
76
7.2.2
Parâmetros
77
7.2.3
Inicialização dos Pesos
77
7.2.4
Escolha da Categoria
78
7.2.5
Ressonância ou Reset
79
7.2.6
Aprendizado
79
7.2.7
Algoritmo de Treinamento da Rede Neural Fuzzy ARTMAP
80
7.2.8
Algoritmo de Teste da Rede Neural Fuzzy ARTMAP
83
7.3
Comentários
83
8
METODOLOGIA
85
8.1
Introdução
85
8.2
Sistema de Detecção e de Decisão
86
8.2.1
Módulo de Detecção de Distúrbios
86
8.2.2
Módulo de Extração das Características de Tensão e de Corrente
88
8.2.3
Módulo Avaliador de Faltas de Alta Impedância
88
8.2.4
Módulo de Decisão do Tipo de Distúrbios
90
8.3
Sistema de Diagnóstico de Distúrbios de Tensão
92
8.3.1
Módulo de Extração das Características de Tensão
93
8.3.2
Módulo de Classificação de Distúrbios de Tensão
94
8.4
Sistema de Diagnóstico de Curtos-Circuitos
96
8.4.1
Módulo de Extração das Características de Corrente
96
8.4.2
Módulo de Classificação de Curtos-Circuitos
97
8.4.3
Módulo de Avaliação da Presença da Terra
99
8.5
Comentários
100
9
APLICAÇÕES E RESULTADOS
101
9.1
Introdução
101
9.2
Padrões de Treinamento e Teste
101
9.3
Sistema de Detecção e de Decisão
102
9.3.1
Módulo de Detecção de Distúrbios
102
9.3.2
Módulo de Extração das Características de Tensão e de Corrente
102
9.3.3
Módulo Avaliador de Faltas de Alta Impedância
102
9.3.4
Módulo de Decisão do Tipo de Distúrbio
107
9.4
Sistema de Diagnóstico de distúrbios de Tensão
108
9.4.1
Módulo de Extração das Características de Tensão
109
9.4.2
Módulo de Classificação de Distúrbios de Tensão
109
9.5
Sistema de Diagnóstico de Curtos-Circuitos
112
9.5.1
Módulo de Extração das Características de Corrente
112
9.5.2
Módulo de Classificação de Curtos-Circuitos
113
9.5.3
Módulo de Avaliação da Presença da Terra
114
9.6
Comentários
115
10
CONCLUSÕES
117
10.1
Sugestões Para Trabalhos Futuros
119
REFERÊNCIAS
121
ANEXO A - DADOS DO SISTEMA TESTE
129
APÊNDICE A - PUBLICAÇÕES
137
A.1
Periódicos Internacionais
137
A.2
Congressos
137
17
INTRODUÇÃO
1
Atualmente, grandes investimentos têm sido aplicados visando modernizar os sistemas
elétricos de potência, em especial os sistemas de distribuição, no que concerne à automação
de suas operações. Neste contexto, duas modalidades de tecnologias se destacam: tecnologia
digital e tecnologia da informação. A primeira refere-se ao uso de componentes
semicondutores de alta velocidade, em sistema de comunicação, controle, proteção, entre
outras importantes funções (ALAG et al., 2001; KEZUNOVIC; ABUR, 2005). A segunda
compreende um grande conjunto de procedimentos de processamento e de análise de sinais
(oscilografias e outros dados).
Um sistema de distribuição de energia elétrica moderno (FAN; BORLASE, 2009;
McDONALD, 2003) terá de satisfazer múltiplos objetivos, incluindo a melhoria da
confiabilidade, eficiência e segurança do sistema. Dentro desta perspectiva, faz-se necessário,
então, desenvolver um sistema integrado, combinando aquisição, processamento e análise de
dados com o propósito de proporcionar a assistência necessária para realizar a automação, o
controle e a tomada de decisão no ambiente de subestações de distribuição de energia elétrica
(DECANINI, 2009; NORTHCOTE-GREEN; TONELLI-NETO, 2009, 2011; WILSON,
2007).
O diagnóstico automático de distúrbios, e.g., curtos-circuitos (KEZUNOVIC;
VASILIC, 2005; MAHANTY; DUTTA GUPTA, 2007; TONELLI-NETO et al., 2011b) e
distúrbios de tensão (DECANINI et al., 2011a; MEHER; PRADHAN, 2010; SANTOSO et
al., 2000), é uma das práticas a qual se deve dar uma maior atenção. A prática de diagnóstico,
a qual engloba detecção, classificação e localização de falhas, deve ser baseada em técnicas e
tecnologias que permitam sua adaptação às mudanças advindas da constante evolução do
sistema elétrico. Normalmente, as tradicionais práticas de diagnóstico de defeitos são
realizadas baseando-se no julgamento dos operadores, levando em conta sua experiência em
análise e no planejamento de ações corretivas. Estas práticas, por serem dependentes de
operadores humanos, são passíveis de erros que podem causar o indevido funcionamento do
sistema de distribuição, e.g., interrupção no fornecimento de energia, e consequentemente
prejuízos às concessionárias. Neste sentido, as metodologias baseadas na inteligência artificial
(BENDER,
1996)
sistemas
especialistas,
lógica
fuzzy
(CHEN;
PHAM,
2006;
18
KARTALOPOULOS, 1996; ZADEH, 1965), redes neurais artificiais (AMIS; CARPENTER,
2010; CARPENTER et al., 1992; KARTALOPOULOS, 1996; MARCHIORI et al., 2011),
etc.) são procedimentos disponíveis que extraem o conhecimento de processos complexos.
Estas técnicas buscam combinar a experiência dos operadores humanos e a capacidade de
realizar rotinas de forma segura e com alta rapidez de resposta. Trata-se de mecanismos que,
se postos à disposição da operação, podem produzir grandes saltos qualitativos, por meio de
procedimento de diagnóstico dos defeitos e de auxílio ao planejamento de ações corretivas,
possibilitando, assim, a automação de subestações de forma plena e eficiente.
Tais procedimentos inteligentes buscam contribuir nos seguintes aspectos:
estabelecer relações de funções de segurança nas subestações, considerando eventos que
não são bem definidos;
habilidade de aprender a partir de exemplos (experiência);
capacidade de generalização em casos em que as informações encontram-se incompletas
ou corrompidas;
acumular novos conhecimentos;
realizar tais tarefas de modo rápido e eficiente.
1.1
Objetivo da Pesquisa
O objetivo desta pesquisa é o desenvolvimento de estratégias de diagnóstico de
distúrbios, ou seja, investigar e identificar falhas no sistema de distribuição, e.g., distúrbios de
tensão, curtos-circuitos e faltas de alta impedância. Trata-se de um sistema destinado ao
reconhecimento, a partir dos sinais provenientes do sistema de aquisição de dados, de
defeitos, e posteriormente à classificação destes, contribuindo para a redução do tempo
necessário para restabelecer as condições normais de operação (DECANINI, 2009;
TONELLI-NETO, 2009, 2011).
Neste sentido, buscar-se-á a concepção de algoritmos que facilmente podem ser
modificados para atender essa nova demanda, através de esquemas inteligentes modulares.
Havendo necessidade de melhorar o desempenho do sistema, para atender determinada
especificidade, basta substituir um ou mais módulos por outros com concepção mais eficiente.
A metodologia proposta, que visa auxiliar a automação das subestações de energia
elétrica é robusta, rápida e eficiente, pois utiliza de técnicas baseadas na inteligência artificial,
19
e.g., rede neural Fuzzy ARTMAP e lógica fuzzy, em seu sistema de diagnóstico. A motivação
pela escolha da rede neural Fuzzy ARTMAP, além desta apresentar características de
estabilidade e plasticidade, é em consequência da possibilidade da inclusão do treinamento
continuado, o qual fornece a rede um constante aprendizado, acompanhando assim a
constante evolução do setor elétrico.
1.2
Justificativa
Os consumidores de energia elétrica, acompanhando a constante evolução do setor
elétrico, tornaram-se mais conscientes em relação à qualidade da energia elétrica entregue
pelas concessionárias. Com isso, falhas nas redes de distribuição, que venham a interromper o
fornecimento de energia ou causem variações na tensão de fornecimento, representam
prejuízo tanto para as concessionárias como para os consumidores.
Quando ocorre um curto-circuito em um sistema de distribuição, a proteção presente
deve atuar isolando o trecho em falta, fazendo com que o fornecimento de energia para os
consumidores naquela região seja interrompido por um determinado intervalo de tempo. Os
distúrbios de tensão, mais frequentes em sistemas de distribuição, não causam a interrupção
do fornecimento de energia, porém afetam a qualidade da energia entregue aos consumidores,
acarretando o mau funcionamento dos equipamentos ligados à rede.
Assim, as concessionárias de energia elétrica necessitam desenvolver técnicas que
objetivem automatizar as subestações de energia elétrica, de modo que as falhas nas redes de
distribuição não ocorram com tanta frequência e, caso ocorram, sua duração seja a menor
possível até que seja restabelecida a condição de operação normal do sistema. Estas técnicas
visam o auxílio aos operadores na identificação e classificação destas falhas, já que
normalmente o processo de diagnóstico, na maioria das vezes, é realizado através da inspeção
visual dos sinais de corrente e tensão por parte dos operadores, e assim sendo, é fortemente
baseado na experiência dos mesmos.
Através do uso destas técnicas, o controle preventivo do sistema de distribuição torna-se
uma importante ferramenta para o auxílio à tomada decisão no ambiente de subestações de
energia elétrica, auxiliando assim os operadores na tomada de decisão.
20
1.3
Estrutura do Texto
O texto está organizado da seguinte forma: estado da arte, subestações de energia
elétrica, método proposto, transformada wavelet, lógica fuzzy, redes neurais artificiais,
metodologia, aplicações e resultados, e conclusões.
A revisão bibliográfica é apresentada na Seção 2. Neste será apresentado o processo de
estudo para a realização da pesquisa, sendo destacados os principais livros e artigos utilizados
como embasamento teórico. Também, os resultados presentes na literatura especializada
servirão como base comparativa para os resultados obtidos nesta pesquisa.
As principais configurações das subestações de energia elétrica, a automação do sistema
de distribuição e os tipos de distúrbios que podem ocorrer nos alimentadores de energia
elétrica, bem como as simulações utilizadas na validação da metodologia são descritas na
Seção 3.
Na Seção 4, abordam-se os principais componentes do sistema de diagnóstico de
distúrbios, além da descrição das principais técnicas empregadas em cada uma das etapas.
Os principais conceitos das técnicas empregadas no desenvolvimento do sistema para
formulação do controle preventivo, i.e., transformada wavelet, lógica fuzzy e redes neurais
artificiais, são apresentados nas Seções 5, 6 e 7, respectivamente.
A metodologia utilizada no desenvolvimento do sistema de diagnóstico de distúrbios é
abordada na Seção 8. Em seguida, a Seção 9 apresenta os principais resultados obtidos por
esta metodologia. Finalmente, a Seção 10 traz as principais conclusões desta pesquisa e
sugestões para trabalhos futuros.
21
2
ESTADO DA ARTE
Para a realização desta pesquisa, foram utilizadas algumas referências de modo que
pudessem introduzir os conceitos básicos das teorias a serem utilizadas na concepção do
sistema para efetuar o controle preventivo.
Com o objetivo de adquirir conhecimento de subestações de distribuição de energia
elétrica, foi realizado um estudo abrangendo a estrutura e as configurações das subestações
atuais, as técnicas de integração e automação de subestações de energia elétrica, e os
equipamentos empregados (FAN; BORLASE, 2009; McDONALD, 2003; NORTHCOTEGREEN; WILSON, 2007).
Na literatura especializada encontram-se trabalhos que propõem técnicas de diagnóstico
de distúrbios em sistemas de distribuição de energia elétrica. O desenvolvimento destas
técnicas tem como principal objetivo a automação das subestações de energia elétrica.
Para o diagnóstico de distúrbios de tensão, destacam-se os trabalhos descritos a seguir.
Santoso et al. (2000) propõem um sistema para classificação de distúrbios de tensão, no
domínio wavelet, o qual utiliza um conjunto de múltiplas redes neurais, sendo as saídas destas
redes integradas com o auxílio da teoria da evidência de Dempster-Shafer (BARNET, 2008).
Reaz et al. (2007) utilizam dos conceitos da transformada wavelet, de redes neurais
artificiais e da lógica fuzzy na identificação de diferentes tipos de distúrbios de tensão.
Uyar et al. (2008) obtêm os coeficientes de detalhe e de aproximação através da
aplicação da transformada wavelet, os quais são agregados via norma entropia. Assim, a rede
neural multi-layer perceptron, com algoritmo de treinamento back-propagation LevenbergMarquardt, é utilizada para classificação dos distúrbios.
Oleskovicz et al. (2009) propõem um sistema híbrido para realizar, de maneira
automática, a detecção, localização e classificação de distúrbios que afetam a qualidade de
energia elétrica é proposto. Este sistema utiliza da transformada wavelet discreta no processo
de detecção e de um conjunto de redes neurais artificiais para classificação destes eventos.
22
Panigrahi e Pandi (2009) classificam diferentes distúrbios de tensão por meio do uso
combinado da transformada wavelet packet e de técnicas baseadas na lógica fuzzy.
Eristi et al. (2010) desenvolvem um algoritmo baseado na transformada wavelet e na
máquina de suporte vetorial para identificação dos distúrbios de tensão.
Masoum et al. (2010) utilizam dos conceitos da transformada wavelet discreta e redes
neurais wavelet na classificação dos distúrbios de tensão.
Meher e Pradhan (2010) aplicam a teoria dos conjuntos fuzzy na classificação de
distúrbios de tensão. As características utilizadas no processo de classificação são obtidas a
partir da transformada wavelet.
Decanini et al. (2011a) utilizam da transformada wavelet para a extração das
caraterísticas das oscilografias de tensão. Estas características são agregadas via conceito
entropia e utilizadas como entrada de uma rede neural Fuzzy ARTMAP, que será responsável
por classificar os distúrbios de tensão.
No diagnóstico de curtos-circuitos podem ser destacados alguns trabalhos, que são
descritos a seguir.
Mohamed e Rao (1995) realizam o diagnóstico de curtos-circuitos através de uma
cascata de redes neurais artificiais multi-layer perceptron utilizando o algoritmo de
treinamento back-propagation.
Chen et al. (2000) apresentam uma metodologia para o diagnóstico de curtos-circuitos
em subestações de distribuição de energia elétrica utilizando uma rede híbrida de causa-efeito
e uma base de regras fuzzy.
Das (2006), utiliza dos conceitos da lógica fuzzy na identificação do tipo de curtocircuito em sistemas de distribuição. Este método necessita somente das oscilografias de
corrente disponíveis na subestação.
Salim et al. (2008) apresentam um esquema híbrido de diagnóstico de curtos-circuitos
para a automação do sistema de distribuição de energia elétrica, empregando transformada
wavelet estacionária e redes neurais feed forward com o algoritmo de treinamento LevenbergMarquardt.
23
Kezunovic (2011) realiza uma discussão a respeito da melhoria na eficiência dos
métodos de diagnóstico de curtos-circuitos em Smart Grid quando se utiliza um elevado
número de dados provenientes de IEDs (Intelligent Electronic Devices).
El-Zonkoly (2011) propõe um novo esquema de diagnóstico de curtos-circuitos. O
algoritmo utiliza o cálculo da norma entropia juntamente com a transformada wavelet dos
sinais de corrente para classificar e localizar curtos-circuitos em redes de distribuição.
A respeito do diagnóstico de faltas de alta impedância, destacam-se os seguintes
trabalhos:
Buchholz et al. (1996) descreve o princípio de funcionamento de um equipamento
utilizado na detecção de faltas de alta impedância utilizando dados pré-gravados. Além disso,
o método avalia a dependência e a segurança do equipamento de detecção de faltas de alta
impedância contra falsos alarmes.
Etemadi e Sanaye-Pasand (2008) apresentam um método para detecção de faltas de alta
impedância, o qual utiliza a decomposição wavelet para extração das características do estado
operativo do sistema e um sistema de inferência neuro-fuzzy (ANFIS (JANG, 1993)) para
classificação do distúrbio.
Samantaray et al. (2008) propõem uma técnica híbrida de reconhecimento de padrão
utilizando transformada S, transformada TT e uma rede neural probabilística para detectar e
classificar faltas de alta impedância.
Samantaray et al. (2009) empregam o filtro de Kalman adaptativo juntamente com uma
rede neural probabilística na detecção e classificação de faltas de alta impedância.
Baqui et al. (2011) apresentam uma nova técnica baseada no uso combinado da
transformada wavelet e uma rede neural multi-layer perceptron na detecção de faltas de alta
impedância em alimentadores de distribuição.
Sarlak e Shahrtash (2011) apresentam um algoritmo baseado no reconhecimento de
padrões para a detecção de faltas de alta impedância. Este algoritmo emprega o gradiente
morfológico de multirresolução na extração de características no domínio do tempo, que
posteriormente são utilizadas como entrada de um conjunto de redes multi-layer perceptron.
24
2.1
Comentários
Nest seção foi apresentada uma breve revisão bibliográfica. Os trabalhos citados desta
seção correspondem aos mais relevantes encontrados na literatura especializada, sendo, então,
utilizados como base teórica para o desenvolvimento da metodologia de diagnóstico de
distúrbios em sistemas de distribuição de energia elétrica.
25
3
SUBESTAÇÕES DE ENERGIA ELÉTRICA
As subestações de energia elétrica correspondem a um conjunto de equipamentos e
obras civis indispensáveis para a medição, supervisão, proteção, controle e comando do
sistema, regulação e transformação dos níveis de tensão.
Nas concessionárias, os projetos mais comuns são a construção de novas subestações e
a ampliação das já existentes. No entanto, devido à complexidade desta tarefa, somente uma
minoria dos funcionários estão familiarizados com todo o processo que permite que esses
projetos a serem concluídos com êxito (McDONALD, 2010).
Para a criação de novas subestações de energia elétrica, necessita-se de um processo de
planejamento ativo. Dentre as pessoas envolvidas no planejamento podem-se destacar:
operadores de planejamento e manutenção, gestores, e engenheiros de projeto. São estes
profissionais que avaliarão a necessidade real da criação de uma nova subestação analisando
os fatores influentes neste processo, e.g., crescimento da carga, estabilidade, confiablidade e
capacidade do sistema. Além disso, a instalação de novos clientes, e.g., uma nova fábrica,
deve ser considerada (McDONALD, 2010; NORTHCOTE-GREEN; WILSON, 2007).
As subestações de energia elétrica podem ser dividas em (McDONALD, 2010):
Subestação de geração: estas instalações conectam os geradores à concessionária e também
fornecem energia fora do local da planta geradora.
Subestação de transmissão: responsável pela transferência de enegia e é referida como uma
estação de comutação. Estas subestações geralmente são os pontos finais de linhas de
transmissão, provenientes de subestações de geração, sendo estas também responsáveis por
fornecer a energia elétrica para os circuitos que alimentam as subestações de distribuição;
Subestações de distribuição: esta é a subestação mais comun em sistemas de energia
elétrica, e fornecem os circuitos terminais que abastecem diretamente a maioria dos
consumidores de energia.
Subestações de utilização: é utilizada como fonte de fornecimento de energia elétrica para
determinados cliente. O requisito técnico para este tipo de instalação depende mais da
necessidades dos clientes, do que das concessionárias.
26
3.1
Configurações de Subestações
O arranjo de uma subestação de distribuição é a combinação adequada do chaveamento
de alta tensão, dos transformadores abaixadores e chaveamento de tensão primária (chaves,
disjuntores e religadores) de modo a obter um desempenho preestabelecido, levando em
consideração o aspecto funcional e o econômico.
Quando se analisa os diagramas unifilares de subestações, procura-se obter uma
avaliação considerando, dentre muitos, os seguintes aspectos:
confiabilidade do sistema;
segurança do sistema;
flexibilidade de operação;
habilidade na redução de correntes de curto-circuito;
simplicidade dos dispositivos de proteção;
facilidade de manutenção e seu efeito na segurança;
facilidade de expansão;
área total;
custo.
Vários fatores podem afetar a confiabilidade do fornecimento de energia de uma
subestação, sendo o arranjo dos barramentos e dos dispositivos de chaveamento um dos mais
importantes. Além de confiabilidade, o arranjo dos barramentos/dispositivos de comutação
terá impacto sobre a manutenção, proteção, desenvolvimento da subestação inicial, e custo
(NORTHCOTE-GREEN; WILSON, 2007).
As configurações mais utilizadas em subestações são (McDONALD, 2010):
Barramento Simples;
Duplo Barramento Simples;
Barramento Simples Seccionado;
Barramento Principal e de Transferência;
Barramento Duplo com um Disjuntor;
Barramento Duplo com Disjuntor Duplo;
Barramento em Anel.
27
3.2
Automação do Sistema de Distribuição de Energia Elétrica
O conceito Smart Grid, e suas tecnologias, têm como principal objetivo oferecer uma
energia mais confiável, segura e sustentável. Aplicando este conceito no sistema de
distribuição, surge, então, a necessidade da automação das operações, i.e., construção da
funcionalidade de “autorregeneração” do sistema, capaz de diagnosticar, de maneira
automática, as falhas. As iniciativas de automação envolvem decisões críticas a respeito de
como integrar as antigas tecnologias com as novas. Decisões críticas também compreendem
escolher, dentro de uma imensa gama de variações, sistemas computacionais, comunicações,
proteção da rede e sistemas de aquisição de dados (NORTHCOTE-GREEN; WILSON, 2007).
A automação do sistema de distribuição depende da capacidade de comunicação das
subestações com seus equipamentos, i.e., disponibilidade e transferência de dados fornecidos
em tempo real para o monitoramento e operação dos equipamentos. Esta comunicação deve
ser capaz de fornecer e manter o alto nível de confiabilidade exigido para a operação do
sistema de energia. Neste contexto, utiliza-se de um abrangente conjunto de funções de
proteção e de tecnologias da informação. Logo, unindo a automação local, o controle remoto
de dispositivos de chaveamento, e a tomada de decisão, cria-se uma ferramenta, flexível e
rentável, para a operação dos sistemas de distribuição de energia elétrica (NORTHCOTEGREEN; WILSON, 2007).
O termo “automação” sugere que o processo é autocontrolado. No entanto, o termo
“automação” está mais relacionado com a coordenação do sistema. Assim, todos os
equipamentos de proteção devem estar coordenados de modo a realizarem, automaticamente,
a função de proteção, isolando o trecho em falta, restabelecendo, posteriormente, a condição
normal de operação (NORTHCOTE-GREEN; WILSON, 2007).
Por conseguinte, esta implantação favorece as concessionárias e os consumidores,
resultando nos seguintes benefícios (NORTHCOTE-GREEN; WILSON, 2007):
benefícios financeiros diretos;
benefícios de confiabilidade e qualidade de energia;
benefícios de segurança e proteção;
benefícios de eficiência energética;
benefícios de controle da rede;
benefícios ao meio ambiente e de conservação de energia.
28
3.3
Distúrbios em Sistemas de Distribuição de Energia Elétrica
Os sistemas de distribuição de energia elétrica estão susceptíveis a falhas decorrentes do
mau funcionamento de equipamentos, contatos de animais às partes energizadas, queimadas,
fenômenos naturais, entre outros. Estes distúrbios podem causar a interrupção do
fornecimento de energia ou afetar diretamente na qualidade da energia, e.g., introduzindo
harmônicos na rede, degradando os índices de qualidade de fornecimento de energia elétrica
das concessionárias e elevando seus custos operacionais.
Desta forma, a seguir, serão apresentados os distúrbios que mais podem ocorrer em
sistemas de distribuição de energia elétrica.
3.3.1
Distúrbios de Tensão
Na questão da qualidade de energia, os distúrbios de tensão correspondem a um dos
conjuntos de distúrbios mais graves, em consequência do seu efeito prejudicial sobre
equipamentos ligados à rede.
Os distúrbios de tensão são caracterizados por apresentarem variações de curta duração
no valor da tensão a partir do valor nominal. Dependendo da magnitude da variação, podem
ser classificados como elevações/afundamentos, interrupções, e dependendo de sua duração
que pode ser instantânea, momentânea ou temporária (PANIGRAHI; PANDI, 2009). A
difusão de equipamentos com características não-lineares, que estão conectados ao sistema
elétrico, contribuiu para a degradação da qualidade de energia, exigindo maior atenção dos
agentes do setor elétrico (IEEE, 2011). Estes distúrbios podem causar interferências nos
sistemas de comunicação, medições imprecisas, superaquecimento de condutores e atuação
indevida de relés, comprometendo assim os consumidores e as empresas de distribuição de
energia (DECANINI et al., 2011a).
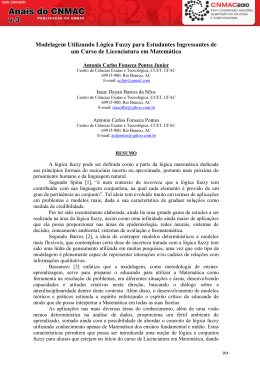
O comportamento do sinal de tensão para alguns distúrbios de tensão são apresentados
nas Figura 1, Figura 2 e
Figura 3. Estas formas de onda foram obtidas por meio de simulações realizadas em um
alimentador real, o qual foi modelado no software ATP.
29
Figura 1 – Comportamento das oscilografias de tensão em um afundamento na fase a.
Fonte: Elaboração do próprio autor.
Figura 2 – Comportamento das oscilografias de tensão em uma elevação na fase a.
Fonte: Elaboração do próprio autor.
Figura 3 – Comportamento das oscilografias de tensão na presença de harmônicos na fase a.
30
Fonte: Elaboração do próprio autor.
3.3.2
Curtos-Circuitos
Para o dimensionamento e a escolha de equipamentos e sistemas elétricos, e de acordo
com o que prescrevem as principais normas existentes, e.g., ABNT e IEC, precisam ser
levados em consideração, além de efeitos de ação prolongada – consequentes da corrente e da
tensão de serviço – também os efeitos que são resultantes dos curtos-circuitos (ROEPER,
1991).
Curtos-circuitos que ocorrem nas redes têm como consequência a modificação das
condições de operação. A passagem para a nova condição está associada a processos de
compensação de natureza eletromagnética e eletromecânica, dos quais vão depender a
grandeza e a variação ao longo do tempo da corrente de curto-circuito (ANDERSON, 1995;
ROEPER, 1991).
Os processos de compensação são influenciados, além do tipo de curto-circuito, pelo
instante da manifestação, das fontes das quais provém a corrente de curto-circuito, do estado
anterior da carga, da localização da falta, do tipo de estrutura da rede, bem como dos valores
característicos e do comportamento dos componentes do circuito (ANDERSON, 1995;
ROEPER, 1991).
Os valores das correntes dos curtos-circuitos apresentam, geralmente, valores algumas
vezes superiores às correntes nominais, condição na qual se manifestam elevados efeitos
dinâmicos e térmicos. Além disso, quando a corrente de curto-circuito se descarrega para a
terra, podem aparecer tensões de contato e influências inadmissíveis, que podem levar à
destruição ou danificação dos equipamentos, além do risco oferecido às pessoas
(ANDERSON, 1995; ROEPER, 1991).
31
Em sistemas trifásicos, existem basicamente quatro tipos de curtos-circuitos,
apresentados na Figura 4.
Figura 4 – Tipos de curtos-circuitos (continua).
a) Monofásica
b) Bifásica sem conexão com a terra
32
c) Bifásica com conexão com a terra
Figura 4 - Tipos de curtos-circuitos (conclusão).
d) Trifásica
Fonte: Adaptado de Roeper (1991).
No caso de faltas trifásicas, os três condutores apresentam correntes alternadas
simétricas defasadas em 120º, tanto quando o local do curto-circuito está ligado, como quando
não está ligado com a terra (ANDERSON, 1995; ROEPER, 1991). Perante tais eventos, nem
todas as tensões de curto-circuito no local da falta são iguais a zero. Por causa das condições
assimétricas, originam-se acoplamentos tanto entre os condutores de fase quanto entre
condutores de fase e a terra ou o condutor terra (ANDERSON, 1995; ROEPER, 1991).
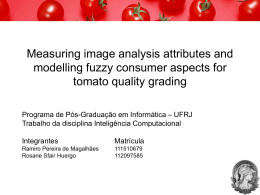
O comportamento das oscilografias de corrente para um curto-circuito monofásico,
bifásico e trifásico, é apresentado nas Figura 5,
33
Figura 6 e
Figura 7, respectivamente. Estas formas de onda foram obtidas por meio de simulações
realizadas em um alimentador real, o qual foi modelado no software ATP.
Figura 5 – Oscilografias de corrente para um curto-circuito monofásico (fase a).
Fonte: Elaboração do próprio autor.
Figura 6 – Oscilografias de corrente para um curto-circuito bifásico (fases b e c).
Fonte: Elaboração do próprio autor.
Figura 7 – Oscilografias de corrente para um curto-circuito trifásico (fases a, b e c).
34
Fonte: Elaboração do próprio autor.
3.3.3
Faltas de Alta Impedância
Estes eventos são oriundos do contato do condutor energizado com superfícies de alta
impedância, e.g., asfalto, calçadas e areias, ou objetos de alta impedância, e.g., galhos de
árvores, os quais limitam os níveis de corrente de falta a valores inferiores aos detectáveis
pelos equipamentos de proteção (ETEMADI; SANAYE-PASAND, 2008). Por conseguinte, o
objetivo primordial do diagnóstico de faltas de alta impedância é preservar a integridade física
das pessoas (TONELLI-NETO et al., 2011a).
Os sinais de corrente e tensão consequentes das faltas de alta impedância são
caracterizadas por serem randômicos, i.e., não apresentam comportamento bem definido,
causados pela não-linearidade destes eventos e pelo possível surgimento do arco elétrico. Dois
tipos de faltas de alta impedância são definidos: ativas e passivas. As faltas ativas são
seguidas do arco elétrico e apresentam valores de corrente de curto-circuito inferiores ao
limite preestabelecido para atuação do relé de proteção. Nas faltas passivas não há ocorrência
do arco elétrico, propiciando maiores riscos à população, pois não há indicação que o
condutor está energizado (SAMANTARAY et al., 2009). Na Figura 8 é apresentado o
comportamento das oscilografias de corrente na presença de uma falta de alta impedância.
Estas formas de onda foram obtidas por meio de simulações realizadas em um alimentador
real, o qual foi modelado no software ATP.
Figura 8 – Comportamento das oscilografias de corrente na presença de uma falta de alta
impedância na fase a.
35
Fonte: Elaboração do próprio autor.
3.4
Simulações de Distúrbios
Normalmente, as concessionárias e os centros de pesquisa não possuem um conjunto de
dados sólidos, representativo do sistema de distribuição de energia elétrica sob a influência de
perturbações. Por causa da escassez de registros, torna-se necessário a modelagem de sistemas
teste nos quais possam ser simulados determinados eventos (distúrbios de tensão, curtoscircuitos, entre outros), fornecendo dados a serem utilizados na avaliação das metodologias,
contribuindo para a automação das subestações de energia elétrica.
Neste contexto, utilizando o software ATP (Alternative Transients Program) (ATP,
2007), modelou-se um alimentador de distribuição de energia elétrica real. Os dados deste
alimentador são apresentados no Anexo A. Assim, foram feitas simulações de distúrbios de
tensão e curtos-circuitos, descritas a seguir. A frequência de amostragem utilizada nas
simulações foi de 15,36 kHz, a qual corresponde a 256 amostras por ciclo.
3.4.1
Distúrbios de tensão
Para as simulações de distúrbios de tensão foi utilizado o modelo teórico proposto por
ABDEL-GALIL et al. (2004), apresentado no Quadro 1.
Quadro 1 – Modelo teórico utilizado na modelagem de distúrbios de tensão (continua)
Distúrbio
Equações
Swell
v t A 1 u t t1 u t t2 sen t
Parâmetros
0,1 0,8
36
T t1 t2 12T
0 , t 0
t1 t2 , u t
1, t 0
v t A 1 u t t1 u t t2 sen t
Sag
0 , t 0
t1 t2 , u t
1, t 0
T t1 t2 12T
v t A 1 u t t1 u t t2 sen t
Outage
Harmônico
Swell com
Harmônico
Sag com
Harmônico
0,1 0,9
0 ,9 1
0 , t 0
t1 t2 , u t
1, t 0
T t1 t2 12T
1sen t 3 sen 3t
v t A
sen 5t sen 7t
7
5
1 1
0,05 3,5 ,7 0,15
1sen t
u t t1
v t A 1
3 sen 3t
u t t
2
5 sen 5t
0 , t 0
t1 t2 , u t
1, t 0
1 1
0,05 3,5 0,15
0,1 0,8
T t1 t2 12T
1sen t
u t t1
v t A 1
3 sen 3t
u t t
2
5 sen 5t
0 , t 0
t1 t2 , u t
1, t 0
1 1
0,05 3,5 0,15
0,1 0,9
T t1 t2 12T
Quadro 1 – Modelo teórico utilizado na modelagem de distúrbios de tensão (conclusão)
Distúrbio
Equações
Parâmetros
2 b 2
Transitório
Oscilatório
v t A sen t be t t1 sen tr t t1
50 100
500 Hz ftr 1500 Hz
Fonte: Elaboração do próprio autor.
Com o auxílio da rotina models do software ATP (DUBÉ, 1996), foram modeladas
fontes para cada um dos tipos de distúrbios de tensão do Quadro 1, sendo estas fontes as
responsáveis por fornecer tensão ao alimentador modelado. No total, foram feitas 624
37
simulações, considerando a fase na qual o distúrbio ocorria e os parâmetros, conforme Quadro
1. O Quadro 2 apresenta o número de simulações para cada tipo de distúrbio de tensão.
Quadro 2 – Simulações de distúrbios de tensão realizados no software ATP
Distúrbio de Tensão
Número de Simulações
Swell
72
Sag
72
Outage
48
Harmônico
144
Swell com Harmônico
96
Sag com Harmônico
96
Transitório Oscilatório
96
Total
624
Fonte: Elaboração do próprio autor.
3.4.2
Curtos-Circuitos
Diversos curtos-circuitos (monofásico, bifásico e trifásico) foram simulados no
alimentador de distribuição de energia elétrica modelado no software ATP. Estas simulações
tiveram como variáveis (TONELLI-NETO et al., 2011b): carregamento do sistema,
localização, ângulo de inserção e resistência de falta, totalizando 1440 simulações. O Quadro
3 apresenta os valores dos parâmetros utilizados na composição do conjunto de simulações de
curtos-circuitos e o Quadro 4 detalha o número de simulações por tipo de curto-circuito.
Quadro 3 – Valores das variáveis utilizadas nas simulações dos curtos-circuitos
Carregamento do Sistema
Localização
Ângulo de Inserção
Resistência de Falta
(%)
(Barra)
(º)
(Ω )
50
7
0
0,1
60
23
45
2
70
60
90
10
80
71
-
40
90
115
-
80
100
119
-
100
38
110
-
-
-
120
-
-
-
Fonte: Elaboração do próprio autor.
Quadro 4 – Simulações de curtos-circuitos realizadas no software ATP (continua)
Curto-Circuito
a-g
b-g
c-g
ab
ac
bc
ab-g
bc-g
ca-g
Resistência de Falta
Número de Simulações
Baixa
96
Alta
48
Baixa
96
Alta
48
Baixa
96
Alta
48
Baixa
96
Alta
48
Baixa
96
Alta
48
Baixa
96
Alta
48
Baixa
96
Alta
48
Baixa
96
Alta
48
Baixa
96
Alta
48
Quadro 4 – Simulações de curtos-circuitos realizadas no software ATP (conclusão)
Curto-Circuito
ca-g
abc(g)
Resistência de Falta
Número de Simulações
Baixa
96
Alta
48
Baixa
96
Alta
48
Total
Fonte: Elaboração do próprio autor.
1440
39
3.4.3
Faltas de Alta Impedância
Além de não possuírem um modelo preciso para a representação de faltas de alta
impedância, estas não são tão fáceis de serem modeladas. Se fosse possível obter tal modelo,
a detecção deste tipo de falta não seria um problema (BUCHHOLZ et al., 1996).
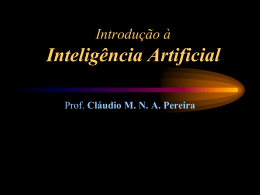
Assim, para a simulação deste tipo de falta, utilizou-se um modelo aproximado de falta
impedância proposto por EMANUEL et al. (1990), apresentado na Figura 9.
Figura 9 – Modelo de falta de alta impedância.
Fonte: Adaptado de Emanuel et al. (1990).
Este modelo possui duas fontes de tensão contínua, V p e Vn , conectadas de maneira
antiparalela por meio de dois diodos. A impedância série ( R e X ) controla a magnitude do
arco de corrente. Desta forma, foram realizadas 25 simulações de faltas de alta impedância,
variando os valores de V p , Vn e da impedância série.
3.5
Comentários
Nesta seção foi feita uma breve introdução a respeito das subestações de energia. Foram
apresentados os tipos de subestações de energia elétrica existentes e as configurações mais
comuns de subestações de distribuição de energia elétrica.
Além disso, foram descritos os principais fatores que levam à necessidade da automação
dos sistemas de distribuição, bem como os distúrbios mais comuns que ocorrem nestes
sistemas. Finalmente, decreveram-se as variáveis e o número total de simulações realizadas
no alimentador para validação da metodologia.
41
4
MÉTODO PROPOSTO
Utilizando ferramentas de processamento de sinais e de inteligência artificial, é proposto
um sistema que seja capaz de realizar, de maneira automática, o diagnóstico de distúrbios em
sistemas de distribuição de energia elétrica. O uso combinado destas técnicas possibilita a
extração do conhecimento de processos complexos, e.g., automação de subestações de energia
elétrica, tornando a tomada de decisão no ambiente de subestações de energia elétrica uma
prática rápida e eficiente.
Trata-se de um sistema destinado ao reconhecimento, a partir dos sinais (de tensão e de
corrente) provenientes do sistema de aquisição de dados, de falhas em sistemas de
distribuição de energia elétrica de maneira a simplificar a proposição de medidas preventivas,
ou seja, o controle preventivo.
4.1
Formulação do Controle Preventivo
O controle preventivo é entendido, nesta pesquisa, como toda a ação possível de ser
implementada no sistema com o objetivo de evitar, ou pelo menos, minimizar a interrupção
do fornecimento de energia aos consumidores.
Para propor medidas preventivas, é necessário, primeiramente, a formulação do controle
preventivo, i.e., desenvolver formas eficientes de detecção e classificação de possíveis falhas
que frequentemente ocorrem no sistema. Neste sentido, é contemplado o desenvolvimento de
métodos de diagnóstico para cada tipo de falha.
Na execução do controle preventivo, os eventos mais importantes são as faltas de alta
impedância e distúrbios de tensãos. Os curtos-circuitos são detectáveis e classificáveis, porém
não são previsíveis. Se não são previsíveis, não há como propor medidas preventivas no
sentido aqui abordado. As faltas de alta impedância, assim como os distúrbios de tensão, via
de regra, proporcionam baixo impacto, ou seja, a sua ocorrência compromete a qualidade da
energia fornecida e são de difícil detecção pelo sistema de proteção (baixíssima
sensibilidade). Porém, se persistirem, estes distúrbios podem comprometer, também, a
42
operação do sistema evoluindo para uma situação mais crítica que é a interrupção parcial ou
total do fornecimento de energia.
Neste contexto, esta pesquisa refere-se ao desenvolvimento de métodos de detecção e de
classificação destas falhas, inclusive curtos-circuitos, e, na sequência, indicar um possível
encaminhamento de soluções para implementação das medidas preventivas, auxiliando a
operação na tomada de decisões (TONELLI-NETO, 2009, 2011). Dentre as possíveis medidas
preventivas que podem ser adotadas, têm-se:
localização do distúrbio;
mobilização da equipe de manutenção para efetuar os reparos na rede de distribuição;
eliminação, parcial ou completamente, da fonte causadora do distúrbio;
inspeção dos equipamentos da rede de distribuição, buscando indícios de danos;
reparo ou substituição dos equipamentos de proteção danificados, que futuramente possam
ser a causa da interrupção do fornecimento de energia.
4.2
Método Para a Formulação do Controle Preventivo
O método para a formulação do controle preventivo é composto por três distintos
sistemas, i.e., sistema de detecção e decisão, sistema de diagnóstico de distúrbios de tensão e
sistema de diagnóstico de curtos-circuitos. Estes fornecem, por sua vez, diagnósticos a
respeito do estado operativo do alimentador, indicando a presença ou não de distúrbios.
Determinada qualquer tipo de anormalidade, o operador, então, tem como função, informar
qual medida preventiva deve ser adotada para que a condição normal de operação seja
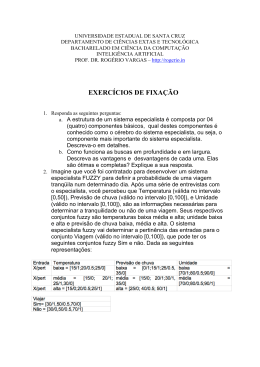
restabelecida. Na Figura 10 é apresentado o diagrama completo do sistema proposto. Além
disso, esta figura mostra as técnicas empregadas nos módulos de cada um dos sistemas.
43
Figura 10 – Sistema completo de diagnóstico de distúrbios para realização do controle
preventivo.
Fonte: Elaboração do próprio autor.
44
4.3
Comentários
Nesta seção, apresentou-se a composição do sistema para realização do controle
preventivo. Por empregar ferramentas baseadas na inteligência artificial, sua principal
característica é a robustez e, a possibilidade de se adaptar à constante evolução do setor
elétrico.
45
5
TRANSFORMADA WAVELET
A transformada Wavelet é uma moderna técnica de processamento de sinais, a qual
relaciona escala e tempo, superando as limitações encontradas nos métodos baseados na
transformada de Fourier. Além disso, tem como principal vantagem o fato de não utilizar uma
escala fixa na análise dos sinais, evitando, assim, o comprometimento com uma determinada
escala. Neste sentido, é possível utilizar escalas maiores para analisar sinais de baixa
frequência e escalas menores para analisar sinais de alta frequência, tornando-se a ferramenta
mais apropriada para avaliação de transitórios em sistemas de distribuição de energia elétrica
(DECANINI et al., 2011a).
5.1
Transformada de Fourier com Janelamento
Em diversas aplicações, para um dado sinal f t (assumindo t uma variável contínua),
tem-se o interesse de análise em seu conteúdo de frequência localizado no tempo. Uma
maneira de obter tal informação é através da aplicação da Transformada de Fourier (TF),
definida na equação (1), a qual fornece uma representação do conteúdo de frequência de f .
No entanto, informações a respeito da localização no tempo não podem ser facilmente obtidas
através da transformada de Fourier do sinal f t , isto é,
f
1
2
f (MALLAT, 2009):
f t e jt dt
(1)
Esta localização no tempo pode ser alcançada através de um primeiro janelamento
executado no sinal f t , de forma a cortar uma parcela bem localizada de f t , e então
aplicar a TF:
janelamento
f ,t
f s g s t e js ds
(2)
A equação (2) representa a Transformada de Fourier com Janelamento (TFJ), a qual é
uma técnica utilizada para localização no tempo-frequência. Sua limitação está no fato da
mesma utilizar uma escala fixa. Desta forma, características do sinal de tamanho inferior ao
tamanho da janela adotada serão perdidas.
46
Na área de processamento de sinais, a mesma é mais comumente encontrada em sua
forma discreta, onde para t e são atribuídos valores regularmente espaçados, i.e., t nt0 e
m0 , sendo m,n , e 0 ,t0 0 . Desta maneira, a equação (2) pode ser reescrita:
janelamento
m,n
5.2
f f s g s nt0 e jm s ds
0
(3)
Transformada Wavelet Contínua
A Transformada Wavelet Contínua (TWC) provê, de maneira similar à TFJ, uma
descrição no domínio tempo-frequência para um determinado sinal f t . Esta transformada
utiliza uma função L
2
, i.e., função wavelet, a qual é uma função oscilatória com valor
médio nulo para decompor o sinal em análise (DAUBECHIES, 1992; MALLAT, 2009):
t dt 0
(4)
A partir da função wavelet, define-se um conjunto de funções ortogonais a,b t que
serão utilizadas como base ortogonal para a representação dos sinais. Este conjunto de
funções é obtido através de dilatações e translações da função wavelet , conforme descrito
pela equação (5):
a ,b t
1
a
t b
, b
a
e a
, com a 0
(5)
sendo:
a : parâmetro de escala;
b : parâmetro de translação.
A normalização é escolhida de modo que a,b para todo a,b , i.e., 1 . A
TWC contínua de um sinal f t em relação às wavelets criadas, i.e., versões dilatadas e
transladadas da função , é definida a seguir:
47
TWC f a,b
f , a ,b
f t
1
a
t b
dt
a
*
(6)
sendo * o conjugado complexo de .
A integral definida acima quantifica a variação de f t em torno de b e é proporcional
à a . Assim, a análise wavelet resulta em um conjunto de coeficientes que indicam o grau de
semelhança entre o sinal original e as funções wavelets utilizadas no processo de
decomposição. De maneira semelhante à TFJ, a TWC fornece a evolução temporal dos
transitórios de frequência.
5.3
Transformada Wavelet Discreta
A Transformada Wavelet Discreta (TWD) é o resultado da amostragem da TWC, que
tem como objetivo permitir sua implementação em sistemas digitais.
De modo a facilitar o processo de discretização da função wavelet, faz-se a a0m ,
b nb0 a0m , onde m,n , e a0 1 , b0 0 . A escolha de a0 e b0 depende, é claro, da função
wavelet . Desta forma, a função wavelet é reescrita, conforme equação (7) (DAUBECHIES,
1992; MALLAT, 2009):
t nb0 a0m
m,n t
, m,n
m
a0m a0
1
(7)
sendo:
a a0m
: parâmetro de escala;
b nb0 a0m : parâmetro de translação.
Assim, discretizando a equação (7), define-se a função wavelet discreta:
m,n k
1
a0m
k nb0 a0m
m
a0
Por fim, a TWD de um sinal amostrado f k é definida por:
(8)
48
TWD f m,n
*
f , m,n f k m.n
k
k
(9)
sendo:
*
m,n
k
5.4
1
a0m
k nb0 a0m
.
m
a
0
*
Análise Multirresolução
Para a aplicação da Análise Multirresolução (AMR) (MALLAT, 2009), primeiramente,
é necessária a determinação de um conjunto de funções de modo que estas formem uma base
ortonormal para os adequados espaços Vm e Wm . Uma base de Vm é definida por um conjunto
de funções m,n n , enquanto que para uma base de Wm utiliza-se umo conjunto de funções
m,n n
(MALLAT, 2009).
A função m,n , definida na equação (10), é denominada função escala. Sua forma
discreta é apresentada na equação (11). Considerando um sinal f k , a projeção deste no
espaço Vm é definida pela equação (12):
t 2m n
m,n t
m
2m 2
(10)
k 2m n
m
2
(11)
1
m,n k
1
2m
am n f ,m,n
(12)
A função m,n é denominada função wavelet, sendo já definida na equação (7), com
a0 2 e b0 1 . Assim, a equação (7) pode ser reescrita conforme equação (13) e sua forma
discreta pela equação (14). A projeção do sinal f k no espaço Wm é definida pela equação
(15):
t 2m n
m,n t
m
2m 2
1
(13)
49
1
m,n k
2m
k 2m n
m
2
dm n f , m,n
(14)
(15)
Por conseguinte, a AMR consiste no cálculo dos coeficientes am1 e d m 1 , determinados
conforme as equações (16) e (17), respectivamente. Para este cálculo, realiza-se a convolução
discreta do sinal am com um filtro passa-baixa ( h ), i.e., função escala discreta, e um passaalta ( g ), i.e., função wavelet discreta, sendo as saídas destes filtros subamostrados com um
fator de 2 (MALLAT, 2009):
am1 p h n 2 p am n
n
dm1 p g n 2 p am n
n
(16)
(17)
Os coeficientes obtidos na saída do filtro passa-baixa ( d m1 ) são caracterizados por
serem os componentes de alta escala e baixa frequência do sinal, denominados coeficientes de
aproximação. Já os coeficientes obtidos na saída do filtro passa-alta am1 são os componentes
de baixa escala e alta frequência, os coeficientes de detalhe.
A execução deste processo corresponde à decomposição do sinal em 1 nível de
resolução. Para realizar a decomposição do sinal em mais um nível deve-se executar a
convolução discreta dos coeficientes de aproximação do nível anterior com os filtros passabaixa e passa-alta, obtendo os coeficientes de detalhe e de aproximação para o nível desejado.
A
Figura 11 apresenta a AMR com 3 níveis de resolução para o sinal a0 .
50
Figura 11 – Análise multirresolução com 3 níveis de decomposição para o sinal a0.
Fonte: Elaboração do próprio autor.
5.5
Famílias de Wavelets
Para que a decomposição seja realizada de forma rápida e eficiente, é necessária a
escolha de uma família adequada, i.e., uma wavelet mãe (mother wavelet). Não há um
consenso a respeito da metodologia empregada para a escolha da família de wavelets em
relação à sua aplicação, de modo que cabe ao usuário escolher de maneira empírica a família
mais adequada para a solução do seu problema. O processo de escolha da família pode ser
bastante custoso, haja vista o grande número de variações de cada uma das wavelets mães. Em
51
geral, as famílias Daubechies e Symlet são as mais utilizadas, o que não quer dizer que outras
famílias não apresentem bons resultados (DECANINI et al., 2011a).
Para que uma determinada função possa ser utilizada como wavelet mãe, esta deve
apresentar as seguintes propriedades (MALLAT, 2009):
deve ser uma função oscilatória;
deve possuir uma rápido decaimento para zero;
deve possuir energia finita;
deve possuir valor médio nulo.
Além disso, o design desta deve ser ótimo, i.e., sua aplicação na decomposição de um
sinal
f ,
deve produzir um elevado número de coeficientes próximos de zero. Isto
depende, então, da regularidade da função , do número de vanishing moments (ordem da
wavelet mãe ou momentos nulos) e do support size (tamanho do suporte).
O número de vanishing moments está associado à ordem polinomial dos sinais que
podem ser representados por uma determinada wavelet mãe, o support size é o intervalo para
o qual esta é definida (fora deste intervalo a função é nula) e a regularidade está relacionada
ao erro introduzido no sinal reconstruído pelos coeficientes wavelets.
A seguir, serão apresentadas as principais famílias de wavelets.
5.5.1
Família Haar
A wavelet de Haar constitui a primeira família de wavelets. Foi desenvolvida por Alfred
Haar em 1910. Trata-se de uma wavelet discontínua, que se assemelha a uma função degrau
unitário. Suas funções escala e wavelet são definidas pelas equações (18) e (19),
respectivamente (DAUBECHIES, 1992):
1, se 0 t 1
0, caso contrário
t
1,
t 1,
0 ,
se 0 t 0,5
se 0,5 t 1
caso contrário
O esboço da função escala e da função wavelet são apresentados na Figura 12.
(18)
(19)
52
Figura 12 – Wavelet mãe de Haar.
a) Função escala t
b) Função wavelet t
Fonte: Adaptado de Daubechies (1992).
As funções da wavelet mãe de Haar não são continuamente diferenciáveis, gerando
alguma descontinuidade durante o processo de decomposição de sinais. Neste sentido, a
reconstrução do sinal original a partir das decomposições pode não ser perfeita, limitando, de
certa forma, suas aplicações. No entanto, tal propriedade é bastante explorada na análise de
sinais que apresentam transitórios súbitos.
5.5.2
Família Daubechies
Esta família de wavelets foi desenvolvida por Ingrid Daubechies, constituindo uma
família de wavelets ortonormais de support size compacto. A expressão support size
compacto refere-se ao fato da função estar definida apenas num intervalo fechado, de modo
que os valores fora desse intervalo sejam nulos (MALLAT, 2009).
As wavelets de Daubechies são divididas em subgrupos, comumente expressos por dbN,
onde N faz menção ao número de vanishing moments. Como mencionado anteriormente, os
vanishing moments estão relacionados à capacidade da wavelet mãe de representar sinais
polinomiais. Assim, para uma wavelet mãe dbN (Daubechies de ordem N ), esta é capaz de
representar sinais cuja ordem polinomial não seja superior à N 1 , e.g., a wavelet mãe db6
consegue representar sinais de ordem polinomial não superior a 5. Sendo assim, teoricamente,
o aumento do número de vanishing moments permite à família de wavelets representar sinais
mais complicados (DAUBECHIES, 1992).
O índice N também é utilizado para expressar o support size da função, i.e., o intervalo
para o qual a função está definida. Para o caso da família Daubechies, tanto a função escala
t quanto a função wavelet t apresenta support size de 2 N 1 . Esta afirmação é
53
exemplificada através da Figura 13, onde é possível verificar graficamente que a família db6
está definida no intervalo 0,11 .
Figura 13 – Wavelet mãe Daubechies db6.
a) Função escala t
b) Função wavelet t
Fonte: Adaptado de Daubechies (1992).
Um detalhe importante da família Daubechies é que a wavelet mãe db1 é equivalente à
família de wavelets de Haar, que tem como support size 0,1 e possui apenas 1 vanishing
moment.
5.5.3
Família Symlet
A família Symlet foi desenvolvida por Daubechies. Esta família possui maiores
características de simetria do que a família Daubechies, por isso o nome Symlet (symmetric
wavelet) (DAUBECHIES, 1992). A Figura 14 apresenta a função escala e a função wavelet da
wavelet mãe sym5.
Figura 14 – Wavelet mãe Symlet sym5.
54
a) Função escala t
b) Função wavelet t
Fonte: Adaptado de Daubechies (1992).
Semelhante à família Daubechies, esta família possui support size compacto. Em geral,
é identificada pela expressão symN (Symlet de ordem N ), onde N indica o número de
vanishing moments apresentados pela função. O support size dessa família também é definido
pela relação 2 N 1 , conforme pode ser verificado na Figura 14.
5.5.4
Família Coiflet
A família Coiflet também foi desenvolvida por Daubechies a pedido de Ronald
Coifman. É usualmente identificada pela notação coifN (Coiflet de ordem
N)
(DAUBECHIES, 1992). A Figura 15 apresenta o comportamento da função escala e da
função wavelet da wavelet mãe coif3.
Figura 15 – Wavelet mãe Coiflet coif3.
a) Função escala t
b) Função wavelet t
Fonte: Adaptado de Daubechies (1992).
Uma das características da família Coiflet é o fato da função escala e da função wavelet
apresentar distintos números de vanishing moments, i.e., 2 N 1 e 2N vanishing moments,
55
respectivamente. Também, o grau de simetria desta família é maior do que o encontrado na
família Daubechies, sendo seu support size definido pela relação 6 N 1 .
5.6
Entropia
A entropia é um conceito utilizado para quantificar o grau de irregularidades de estados.
Neste contexto, ela se torna uma ferramenta ideal para quantificar a ordenação de sinais nãoestacionários (ZHANG et al., 2004). A norma entropia é definida de acordo com a equação
(20):
Z
EN x n
P
(20)
n 1
sendo:
Z : número de amostras do sinal x ;
P : nível de energia.
Em sinais analisados através da AMR, este conceito é aplicado com o propósito de
agregar a informação presente nos coeficientes de detalhe e de aproximação de cada
decomposição.
5.7
Energia
A energia é uma particularidade da norma entropia, i.e., quando o nível de energia P é
igual a 2. Também é utilizada para caracterizar o comportamento de sinais não-estacionários,
e.g., agregar informações presentes nos coeficientes de detalhe e de aproximação gerados a
partir da aplicação da AMR. De acordo com o Teorema de Parseval, existe uma conservação
de energia entre o sinal original e o sinal transformado (OPPENHEIM; SCHAFER, 1975).
O cálculo da energia é definido pela equação (21):
Z
EG x n
n 1
sendo:
Z : número de amostras do sinal x .
2
(21)
56
5.8
Comentários
Nesta seção foram apresentados os principais conceitos da Transformada Wavelet. Esta
é aplicada em sinais contínuos e discretos, visando a extração de características dos mesmos.
Além disso, a aplicação da análise multirresolução tem como principal objetivo filtrar o sinal.
A aplicação desta filtragem gera componentes de baixa e alta frequência, i.e., os coeficientes
de aproximação e de detalhe, os quais podem ser agregados utilizando a entropia ou energia,
sendo possível a representação do sinal de maneira qualitativa.
Por fim, as técnicas baseadas na Teoria Wavelet provam ser mais eficientes do que os
métodos baseados na transformada de Fourier por conservarem a informação dos transitórios
de frequência no domínio do tempo.
57
6
LÓGICA FUZZY
Lógica refere-se ao estudo dos métodos e princípios do raciocínio humano. Na lógica
clássica as proposições são tratadas, sempre, como sentenças verdadeiras ou falsas, mas nunca
entre uma destas sentenças ou as duas simultaneamente (CHEN; PHAM, 2006).
Neste sentido, Lotfi Zadeh, em 1965, propôs uma nova teoria de conjuntos, denominada
teoria dos conjuntos fuzzy (ZADEH, 1965). Esta teoria é importante no sentido de que o
mundo não é constituído por fatos absolutamente verdadeiros ou falsos, sendo possível
representar valores de pertinência intermediários entre os valores “verdadeiros” e “falsos” da
lógica clássica.
A teoria clássica de conjuntos é aplicada às informações consideradas completamente
verdadeiras, cujo valor de verdade é igual a 1, ou informações completamente falsas, cujo
valor de verdade é igual a 0. A vantagem da lógica fuzzy consiste na capacidade da mesma
poder ser aplicada às informações que não são completamente verdadeiras ou falsas,
possuindo um valor entre 0 e 1, sendo mais compatível com o raciocínio lógico humano.
6.1
Teoria de Conjuntos Clássica
Considere S um conjunto não-vazio, denominado conjunto universo, que consiste de
todos os possíveis elementos de interesse de contexto particular. Cada elemento de interesse é
chamado de membro ou elemento de S . A união de uma quantidade (finita ou infinita) de
elementos de S é definido como um subconjunto de S , denotado por A .
Um determinado elemento x de S pode pertencer ou não a um subconjunto A de S .
Neste sentido, são utilizadas as seguintes notações para estas representações, respectivamente
(CHEN; PHAM, 2006):
x A
(22)
x A
(23)
A indicação de que A é um subconjunto de S é apresentada na equação (24):
58
A S
(24)
Para qualquer conjunto A , a função característica de A é definida por:
1, se x A
0, se x A
A x
6.2
(25)
Teoria de Conjutos Fuzzy
Nos conjuntos fuzzy um determinado elemento pode pertencer a um conjunto
parcialmente. O grau de pertinência é definido através da função característica generalizada,
denominada função de pertinência. A função de pertinência de um conjunto fuzzy é definida
pela equação (26) (COX, 1994; ZADEH, 1965):
A x : U 0,1
(26)
Nesta equação, a cada elemento x de U , associa-se o grau A x , i.e., o valor com o
qual x pertence a A .
Os valores da função de pertinência são valores reais definidos no intervalo 0,1 . Com
isso, definem-se três possíveis níveis de compatibilidade do elemento x de U com o
conjunto A .
A x 0
: x não pertence ao conjunto A ;
0 A x 1 : x pertence parcialmente ao conjunto A , com grau A x ;
A x 1
: x pertence completamente ao conjunto A .
As principais operações fuzzy entre dois conjuntos fuzzy A e B , apresentados na Figura
16, para um determinado elemento x , são definidas a seguir (CHEN; PHAM, 2006).
59
Figura 16 – Conjuntos fuzzy.
a) Conjunto fuzzy A
b) Conjunto fuzzy B
Fonte: Elaboração do próprio autor.
6.2.1
União (Fuzzy OR)
A união entre conjuntos fuzzy é definida pela equação (27):
AB x A x B x : máx A x , B x
(27)
sendo:
: operador fuzzy OR.
A união entre dois conjuntos fuzzy (representada pela linha vermelha) é mostrada na
Figura 17.
Figura 17 – União entre dois conjuntos fuzzy.
Fonte: Elaboração do próprio autor.
60
6.2.2
Interseção (Fuzzy AND)
A interseção entre conjuntos fuzzy é definida pela equação (28):
AB x A x B x : min A x , B x
(28)
sendo:
: operador fuzzy AND.
A interseção entre dois conjuntos fuzzy (representada pela linha vermelha) é mostrada
na Figura 18.
Figura 18 – Interseção entre dois conjuntos fuzzy.
Fonte: Elaboração do próprio autor.
6.2.3
Complemento (Fuzzy NOT)
O complemento de um conjunto fuzzy é definido pela equação (29):
A x 1 A x
(29)
O complemento de um conjunto fuzzy (representado pela linha vermelha) é mostrado na
Figura 19.
61
Figura 19 – Complemento de um conjunto fuzzy.
Fonte: Elaboração do próprio autor.
6.3
Funções de Pertinência
As funções de pertinência são funções contínuas e limitadas no intervalo 0,1 que
caracterizam os conjuntos fuzzy, i.e., variáveis linguísticas. Estas funções caracterizam de
forma gradual a pertinência nos conjuntos fuzzy, ao contrário do que ocorre com a pertinência
em conjuntos da teoria de conjuntos clássica, denominados crisp, para os quais a pertinência é
do tipo “pertence” ou “não pertence” (CHEN; PHAM, 2006). A Figura 20, como exemplo,
descreve o conceito “quente” através de um conjunto crisp e através de um conjunto fuzzy.
Figura 20 – Exemplo de utilização de funções de pertinência na representação das variáveis
linguísticas do conceito “quente”.
a) Conjunto crisp
b) Conjunto fuzzy
Fonte: Adaptado de Lopes (2005).
Em geral, as funções de pertinência podem ter diferentes formas, as quais são escolhidas
baseando-se na natureza da aplicação. Dentre as funções existentes, podem ser destacadas as
62
funções triangulares, trapezoidais, gaussianas e exponenciais. O usuário tem a liberdade de
escolher, de forma arbitrária, uma destas funções ou, então, definir uma função distinta, de
modo que esta produza melhores resultados (KASABOV, 1998; MENDEL, 1995).
A seguir, são apresentas algumas funções de pertinência.
6.3.1
Triangular
A função de pertinência triangular apresenta três vértices, i.e., v1 , v2 e v3 , utilizados na
composição da função de pertinência. São estes vértices que definem o desempenho da
inferência fuzzy.
Figura 21 – Função de pertinência triangular.
Fonte: Elaboração do próprio autor.
A função de pertinência triangular é definida pelo conjunto de equações a seguir:
x v1
v v , v1 x v2
2 1
x v3
x
, v2 x v3
v2 v3
0 , nos demais intervalos
6.3.2
(30)
Trapezoidal
A função de pertinência trapezoidal apresenta quatro vértices, i.e., v1 , v2 , v3 e v4 ,
utilizados na composição da função de pertinência.
63
Figura 22 – Função de pertinência trapezoidal.
Fonte: Elaboração do próprio autor.
A função de pertinência trapezoidal é definida pelo conjunto de equações a seguir:
x v1
v v , v1 x v2
2 1
1 ,v2 x v3
x
x v4 , v x v
4
v3 v4 3
0 , nos demais intervalos
6.3.3
(31)
Gaussiana
A função de pertinência gaussiana apresenta dois parâmetros que determinam o
comportamento da mesma.
Figura 23 – Função de pertinência gaussiana.
Fonte: Elaboração do próprio autor.
64
A função de pertinência gaussiana é definida pela equação (32):
x e
x x0
2
2
2
(32)
sendo:
x0 : posição do máximo, i.e., centro da gaussiana;
: mede a meia largura a uma altura de e 1 .
6.4
Sistema Fuzzy
O sistema fuzzy é considerado único devido a sua capacidade de trabalhar
simultaneamente com dados numéricos e conhecimentos linguísticos (conjuntos fuzzy). Este
sistema realiza o mapeamento de um vetor de entrada crisp em uma saída crisp, i.e., mapeia
números em números. Seu funcionamento é baseado na capacidade humana de tomar
decisões, através do raciocínio, em situações onde a incerteza e a imprecisão são dominantes
(MENDEL, 1995).
Como mencionado anteriormente, um sistema fuzzy mapeia entradas crisp em saídas
crisp. Este é composto por quatro componentes: fuzzyficação, base de regras, inferência fuzzy
e defuzzyficação, que são mostrados na Figura 24.
Figura 24 – Sistema fuzzy.
Fonte: Adaptado de Mendel (1995).
A presença do fuzzyficador e do defuzzyficador permite que o usuário trabalhe com
variáveis de entrada de valor real e obtenha variáveis de saída de valor real, sendo que todo o
processo é realizado com variáveis linguísticas.
65
A explicação de cada bloco componente do sistema fuzzy é apresentada a seguir.
6.4.1
Fuzzyficação
Este bloco é responsável por decompor uma determinada entrada e/ou saída em um ou
mais conjuntos fuzzy. Cada conjunto fuzzy cobre uma região particular de valores (entrada ou
saída) e, através da função de pertinência, produz um grau de pertinência com valores
compreendidos entre 0 e 1. O resultado dos conjuntos fuzzy representa o grau para o qual um
valor de entrada ou um valor de saída é um membro daquele conjunto fuzzy particular
(KANDEL, 1993). Na fase de fuzzyficação é observada uma superposição entre os limites dos
conjuntos fuzzy, que é necessária para prover uma operação suave do sistema. O processo de
fuzzyficação permite que as entradas e saídas do sistema sejam expressas em termos
linguísticos de maneira que as regras possam ser aplicadas de uma maneira simples para
expressar um sistema complexo.
6.4.2
Base de Regras
A base de regras é um dos principais componentes dos sistemas fuzzy. É constituída por
uma série de sentenças SE-ENTÃO (IF-THEN rules), que consistem de uma condição e uma
ação, definidas como sendo uma função da entrada e uma função da saída dos conjuntos fuzzy,
respectivamente. Estas regras são do tipo (CHEN; PHAM, 2006):
Se x é A premissa então y é B conclusão
(33)
Normalmente, um sistema fuzzy exige mais de uma regra para descrever completamente
toda a ação necessária. Estas regras podem ser geradas a partir da experiência ou através de
dados numéricos.
6.4.3
Inferência Fuzzy
A inferência fuzzy consiste na manipulação da base de regras através da aplicação das
operações fuzzy, descritas pelas equações (27)-(29). Estes operadores são utilizados para
combinar as regras SE-ENTÃO, de maneira que os conjuntos fuzzy de entrada sejam
mapeados nos conjuntos fuzzy de saída. Cada regra utilizada é interpretada como uma
implicação (MENDEL, 1995).
66
6.4.4
Defuzzyficação
O processo de defuzzyficação tem como principal objetivo transformar a saída fornecida
pelo processo de inferência, que neste caso é um dado fuzzy, em um valor real (crisp). Nesta
etapa podem ser utilizados diferentes métodos de defuzzyficação, dos quais se destacam:
critério do máximo, média do máximo e o centro de área (MENDEL, 1995).
Critério do máximo: neste processo é escolhido o valor ( y ) do conjunto fuzzy para o qual
a função de pertinência ( y ) é máxima.
Média do máximo:
neste processo são escolhidos os valores ( y ) do conjunto fuzzy de
saída para o qual a função de pertinência ( y ) é máxima. Assim,
a saída corresponde à média aritmética destes valores.
Centro de área:
este método determina o centro de gravidade ( y ), i.e., centro de
área, do conjunto fuzzy de saída, sendo este valor utilizado como
resultado final.
Dentre estes, o método mais empregado na defuzzyficação é o método do centro de área,
também conhecido como centroide, definido na equação (34):
n
y
u
i 1
n
i i
i 1
(34)
i
sendo:
n
: número de regras;
i : grau de pertinência da regra i ;
ui : ação de controle recomendada referente à regra i .
Normalmente, o valor de ui é considerado como sendo o valor da projeção sobre a
abscissa, correspondente ao valor máximo do conjunto fuzzy ( 1 ).
67
6.5
Comentários
Nesta seção foram apresentados os principais conceitos da lógica fuzzy. Também foram
definidos os operadores lógicos fuzzy empregados nas operações entre os conjuntos fuzzy.
Para a representação destes conjuntos fuzzy existem diferentes tipos de funções de pertinência,
ficando a critério do usuário a escolha pela melhor delas.
Por fim, abordou-se o funcionamento e os componentes de um sistema fuzzy, o qual é
baseado na capacidade humana de tomar decisões em ambientes incertos e imprecisos.
69
7
REDES NEURAIS ARTIFICIAIS
Uma das características mais interessantes da memória humana é a capacidade de
continuamente aprender com a inclusão de novas informações, sem perder o conhecimento
previamente adquirido. A maioria das redes neurais artificiais (RNAs) está sujeita a perder o
conhecimento previamente adquirido caso novas informações sejam adicionadas para seu
aprendizado.
Assim, Grossberg apresentou, em 1976, as redes neurais da família ART (Adaptive
Ressonance Theory) (GROSSBERG, 1976a, 1976b), as quais consistem de um sistema de
aprendizado não-supervisionado (LOPES, 2005). A topologia destas redes é baseada na teoria
da ressonância adaptativa, possuindo duas importantes características: estabilidade e
plasticidade. A estabilidade corresponde à capacidade de aprender através do ajuste dos pesos
e a plasticidade à capacidade de continuar a aprender com a inclusão de novos padrões sem
perder a memória previamente adquirida. Nas redes neurais feedforward supervisionadas,
exemplificando a importância da estabilidade e da plasticidade, novas informações
adicionadas gradualmente destroem as informações adquiridas anteriormente, não podendo
atingir a estabilidade com uma mudança de ambiente (WEENINK, 1997).
As redes neurais da família ART são capazes de realizar, de maneira estável e através
da auto-organização, o reconhecimento de categorias em resposta a sequências arbitrárias de
padrões de entrada (CARPENTER; GROSSBERG, 1992; LOPES, 2005; WEENINK, 1997).
Das redes neurais pertencentes à família ART, podem ser destacadas:
1.
Rede neural ART1: esta rede possui treinamento não-supervisionado. É capaz de
reconhecer padrões de entrada binários de forma arbitrária. Nesta rede são utilizados os
operadores lógicos binários AND/OR (CARPENTER; GROSSBERG, 1987a).
2.
Rede neural ART2: esta rede possui treinamento não-supervisionado. É capaz de
reconhecer tanto padrões de entrada binários como padrões de entrada analógicos
(CARPENTER; GROSSBERG, 1987b).
3.
Rede neural Fuzzy ART: esta rede possui treinamento não-supervisionado. É capaz de
reconhecer tanto padrões de entrada binários como padrões de entrada analógicos. Nesta
rede são utilizados os operadores lógicos fuzzy AND/OR (CARPENTER et al., 1991b).
70
4.
Rede neural ARTMAP: esta rede possui treinamento supervisionado. É composta por um
par de módulos ART, interconectados por um módulo de memória associativa Inter-ART,
sendo capaz de reconhecer tanto padrões de entrada binários como padrões de entrada
analógicos (CARPENTER et al., 1991a).
5.
Rede neural Fuzzy ARTMAP: esta rede possui treinamento supervisionado. É composta
por um par de módulos Fuzzy ART, interconectados por um módulo de memória
associativa Inter-ART, sendo capaz de reconhecer tanto padrões de entrada binários como
padrões de entrada analógicos. Nesta rede são utilizados os operadores lógicos fuzzy
AND/OR (CARPENTER et al., 1992).
O sistema ART é dividido em dois subsistemas: um de atenção e outro de orientação
(CARPENTER et al., 1991b; WEENINK, 1997), como apresentado na Figura 25.
Figura 25 – Diagrama de blocos da rede neural ART.
Fonte: Adaptado de Weenink (1997).
O subsistema de atenção consiste de duas camadas de neurônios interconectados: campo
F1 e campo F2 , responsáveis pela comparação e pelo reconhecimento, respectivamente. O
campo F0 representa a entrada atual do sistema a . A memória de curto prazo (STM – Short
Term Memory) está associada à atividade desenvolvida nos dois campos, F1 e F2 , no estado de
ressonância. É durante o estado de ressonância que ocorre o aprendizado do sistema
(DJUKANOVIC et al., 1995; GEORGIOPOULOS et al., 1996; GOPAL et al., 1999;
SIMPSON, 1989).
71
Os campos F1 e F2 estão conectados por conexões não-recorrentes ou diretas
(feedforward) (de F1 para F2 ), e por conexões recorrentes (feedback) (de F2 para F1 ). Os
pesos associados às conexões de baixo para cima (bottom-up) e de cima para baixo (topdown) entre os campos F1 e F2 são denominados de memória de longo prazo (LTM – Long
Term Memory) (GOPAL et al., 1999; KEYVAN, 1999). O subsistema de orientação é
necessário para estabilizar o processo de STM e aprendizagem em LTM, permitindo que a
rede aprenda com a entrada de novos padrões sem perder o conhecimento previamente
adquirido. Este subsistema é responsável por verificar se ocorreu ou não ressonância, e
consequentemente pelo sinal de reset. O parâmetro ( possui valor compreendido entre 0
e 1) é o responsável pelo controle da ressonância e do reset, determinando a decisão do
processo de classificação das categorias (GOPAL et al., 1999; KEYVAN, 1999).
Então, tem-se que o subsistema de atenção é responsável pela indicação de uma
categoria vencedora e o subsistema de orientação em aceitar a categoria sugerida ou reorientar
para a busca por um nova categoria (GRANGER et al., 1997).
Nos sistemas ART, os vetores são representados como linhas e não como colunas,
diferindo da representação adotada na literatura. Esta representação visa a simplificação na
formulação das equações.
Como nesta pesquisa emprega-se a rede neural Fuzzy ARTMAP no desenvolvimento da
metodologia, serão apresentados a seguir os principais conceitos da rede neural Fuzzy ART e,
por conseguinte, abordar-se-á o funcionamento da rede neural Fuzzy ARTMAP.
7.1
Rede Neural Fuzzy ART
A rede neural Fuzzy ART, apresentada na Figura 26, incorpora cálculos da teoria dos
conjuntos fuzzy (ZADEH, 1965) em sistemas ART. A mesma possui capacidade de
reconhecimento estável através da auto-organização em resposta a padrões de entrada binários
ou analógicos (CARPENTER; GROSSBERG, 1992; GEORGIOPOULOS et al., 1996;
LOPES et al., 2005). A diferença entre as redes neurais ART e Fuzzy ART se baseia no
operador adotado na realização das operações. Na rede neural ART, as operações são
realizadas utilizando o operador intersecção, definido por . Já na rede Fuzzy ART, adota-se
o operador fuzzy AND, definido por .
72
Figura 26 – Rede neural Fuzzy ART.
Fonte: Adaptado de Lopes (2005).
7.1.1
Dados de Entrada
Na rede neural Fuzzy ART os dados de entrada são denotados pelo vetor a ,
a a1 ... aM , M-dimensional. As entradas são normalizadas para evitar a proliferação de
categorias na rede neural Fuzzy ART de acordo com a equação (35) (CARPENTER;
GROSSBERG, 1992; GEORGIOPOULOS et al., 1996):
a
a
a
(35)
sendo:
a : vetor de entrada normalizado;
M
a ai .
i 1
Posteriormente é efetuada a codificação do complemento, preservando a amplitude da
informação. A codificação do complemento é representada pela equação (36) (CARPENTER;
GROSSBERG, 1992; GEORGIOPOULOS et al., 1996):
c
ai 1 ai
(36)
73
sendo:
c
a i : complemento do vetor normalizado.
Então, o vetor de entrada no campo F0 será um vetor 2M-dimensional, denotado pela
equação (37) (CARPENTER; GROSSBERG, 1992; GEORGIOPOULOS et al., 1996):
c
c
c
I a a a1 ... a M a1 ... a M
7.1.2
(37)
Parâmetros
Existem três parâmetros fundamentais que devem ser especificados antes de iniciar o
processo de treinamento da rede neural Fuzzy ART. São eles (CARPENTER; GROSSBERG,
1992; GEORGIOPOULOS et al., 1996):
Parâmetro de escolha ( 0 ): atua na seleção de categorias;
Taxa de treinamento ( 0,1 ): controla a velocidade de adaptação da rede;
Parâmetro de vigilância ( 0,1 ): controla a ressonância da rede. É responsável pelo
número de categorias criadas. Se é grande, muitas categorias são criadas, fazendo com
que a rede possua baixa capacidade de generalização. Porém, se é pequeno, poucas
categorias são criadas, fazendo com que a rede possua alta capacidade de generalização.
7.1.3
Inicialização dos Pesos
Inicialmente, todos os pesos da rede neural Fuzzy ART ( W Nx 2 M ) possuem o valor
igual a um, indicando que não existe nenhuma categoria ativa (CARPENTER; GROSSBERG,
1992):
W j ,1 0 ... W j ,2 M 0 1
7.1.4
(38)
Escolha da Categoria
Com o vetor de entrada I em F1 , para cada nó j em F2 , i.e., para cada categoria criada,
a função de escolha T j é determinada pela equação (39) (CARPENTER; GROSSBERG,
1992):
74
Tj
I W j
Wj
(39)
sendo o operador fuzzy AND definido pela equação (40):
p q min pi ,qi
(40)
A escolha da categoria ocorre quando no mínimo um dos nós de F2 se torna ativo. A
categoria é escolhida como o nó ativo jv , de acordo com (CARPENTER et al., 1991b; HE et
al., 2002):
jv arg max T j , para j 1, 2, ... ,N
(41)
sendo jv a categoria ativa (vencedora).
Se existir mais de uma categoria ativa, a categoria escolhida será aquela que tiver o
menor índice.
Assim, com a determinação da categoria ativa é possível calcular o vetor de atividade
em F1 , indicado por X X1 ... X 2 M , de acordo com a equação (42) descrita a seguir:
se F2 é inativo
I
X
I W jv se o nó jv de F2 é ativo
(42)
Já o vetor de atividade em F2 é representado por Y Y1 ... YN , sendo N o número de
categorias criadas em F2 . Então, de acordo com (VERZI et al., 2003):
Y j 1 , para j jv
Y j 0 , para j jv
7.1.5
(43)
Ressonância ou Reset
A ressonância ocorre se o critério de vigilância, definido pela equação (44), for
satisfeito (CARPENTER; GROSSBERG, 1992):
75
I W jv
I
(44)
Se a equação (44) não for satisfeita, então ocorre o reset. No reset, o nó jv de F2 é
excluído do processo de busca da categoria ativa dada pela equação (41), isto é, T jv assume o
valor igual a zero e, então, é escolhida uma nova categoria pela equação (41) para realizar
novamente o processo de ressonância. Este processo é executado até que a rede encontre uma
categoria ativa jv que satisfaça a equação (44).
7.1.6
Aprendizado
O aprendizado ocorre após o vetor I completar o processo de ressonância. Nesta etapa
é que ocorre a atualização dos pesos da rede, de acordo com a equação (45) (CARPENTER;
GROSSBERG, 1992; VERZI et al., 2003):
W jv novo I W jv velho 1 W jv velho
(45)
Dependendo do valor de , são possíveis dois tipo de treinamento (adaptação dos
pesos da rede). São eles:
1. Treinamento lento ( 0 1): os pesos da rede são adaptados lentamente. Neste tipo de
treinamento, os padrões de entrada são apresentados à rede diversas vezes.
2. Treinamento rápido ( 1 ): os pesos da rede são adaptados rapidamente. Na execução do
treinamento rápido, os padrões de entrada são apresentados à rede somente uma vez.
7.2
Rede Neural Fuzzy ARTMAP
A arquitetura neural Fuzzy ARTMAP é um sistema de aprendizado auto-organizável.
Esta rede possui treinamento supervisionado e pertence à família ART, i.e., sua estrutura é
baseada na teoria da ressonância adaptativa e é similar à rede Fuzzy ART, empregando,
também, cálculos baseados na lógica fuzzy (CARPENTER et al., 1992).
Esta rede é composta por um par de módulos Fuzzy ART (ARTa e ARTb), que são
conectados por um módulo de memória associativa denominado Inter-ART, como mostrado
na Figura 27.
76
Figura 27 – Rede neural Fuzzy ARTMAP.
Fonte: Adaptado de Lopes (2005).
O módulo Inter-ART possui um mecanismo auto-regulador interno chamado matchtracking, o qual objetiva maximizar a generalização e minimizar o erro da rede. Sempre que a
rede faz um prognóstico errado, através de uma conexão associativa instruída, o parâmetro de
vigilância a do módulo Fuzzy ARTa será incrementado em uma quantidade mínima
necessária para corrigir o erro no módulo Fuzzy ARTb (CARPENTER et al., 1992; LIM;
HARRISON, 1997; LOPES et al., 2005).
O módulo Fuzzy ARTa inicializará, então a busca de uma nova categoria para a entrada
atual até que se encontre um prognóstico correto ou crie uma nova categoria no módulo Fuzzy
ARTa e a sua conexão associativa correspondente à categoria no módulo Fuzzy ARTb
(CARPENTER et al., 1992; LIM; HARRISON, 1997; LOPES et al., 2005).
7.2.1
Dados de Entrada
A rede neural Fuzzy ARTMAP possui duas entradas, uma referente ao módulo Fuzzy
ARTa e outra referente ao módulo Fuzzy ARTb. A entrada referente ao módulo Fuzzy ARTa é
representada pelo vetor a , a a1 ... aM a , Ma-dimensional. Já a saída do módulo Fuzzy
ARTb, que corresponde à saída desejada referente ao padrão de entrada da rede Fuzzy ARTa, é
representada pelo vetor b , b b1 ... bM a , Mb-dimensional (CARPENTER et al., 1992).
77
Assim, como na rede Fuzzy ART, os vetores de entrada são normalizados e
complementados de maneira a compor as entradas da rede, I a e I b , definidas de acordo com
as equações (46) e (47):
7.2.2
c
c
c
I a a a a1 ... a M a a1 ... a M a
(46)
c
c
c
I b b b b1 ... bM b b1 ... b Mb
(47)
Parâmetros
Os parâmetros utilizados na rede neural Fuzzy ARTMAP são os mesmos utilizados na
rede Fuzzy ART, recebendo um parâmetro de vigilância para cada módulo Fuzzy ART. A
única diferença é o parâmetro de vigilância do módulo Inter-ART, ab (CARPENTER et al.,
1992). A seguir, são apresentados todos estes parâmetros.
Parâmetro de escolha ( 0 ): atua na seleção de categorias;
Taxa de treinamento ( 0,1 ): controla a velocidade de adaptação da rede;
Parâmetro de vigilância do módulo Fuzzy ARTa ( a 0,1 ): controla a ressonância do
módulo Fuzzy ARTa.
Parâmetro de vigilância do módulo Fuzzy ARTb ( b 0,1 ): controla a ressonância do
módulo Fuzzy ARTb.
Parâmetro de vigilância do módulo Inter-ART ( ab 0,1 ): controla a ressonância do
módulo Inter-ART.
7.2.3
Inicialização dos Pesos
Inicialmente, todos os pesos da rede Fuzzy ARTMAP ( WaNx 2 M a , WbNx 2 M b e Wab
NxN )
possuem o valor igual a um, indicando que não existe nenhuma categoria ativa
(CARPENTER et al., 1992):
W ja,1 0 ... W ja,2 M a 0 1
(48)
Wkb,1 0 ... Wkb,2 Mb 0 1
(48)
W jab,1 0 ... W jab,N 0 1
(50)
78
sendo:
Ma: número de componentes do vetor a (entrada);
Mb: número de componentes do vetor b (saída desejada);
N : número de padrões de treinamento (pares de vetores a ,b ).
7.2.4
Escolha da Categoria
A rede neural Fuzzy ARTMAP realiza o processamento de duas redes Fuzzy ART
a
(ARTa e ARTb). Assim, para cada módulo ART calculam-se as funções de escolha T j e Tkb ,
para as entradas I a e I b , respectivamente (CARPENTER et al., 1992):
T
a
j
T
b
k
I a W ja
W ja
I b Wkb
Wkb
(51)
(52)
Assim, é escolhida uma categoria ativa para a rede Fuzzy ARTa e uma para a rede Fuzzy
ARTb, como apresentado pelas equações (53) e (54) (CARPENTER et al., 1992):
jv arg max T ja , para j 1, 2, ... ,N
(53)
kv arg max Tkb , para k 1, 2, ... ,N
(54)
sendo:
jv : categoria ativa (vencedora) para a rede Fuzzy ARTa;
kv : categoria ativa (vencedora) para a rede Fuzzy ARTb;
Se existir mais de uma categoria ativa, a categoria escolhida será aquela que tiver o
menor índice.
O vetor de atividade Fuzzy ARTb é representado por Y b Y1b ... YNb e calculado
conforme a equação (55) (VERZI et al., 2003):
79
Ykb 1 , para k kv
Ykb 0 , para k kv
7.2.5
(55)
Ressonância ou Reset
A ressonância ocorre se os critérios de vigilância, definidos pelas equações (56) e (57),
forem satisfeito (CARPENTER et al., 1992):
I a W jva
Ia
I b Wkvb
Ib
a
(56)
b
(57)
Se a equação (56) não for satisfeita, então ocorre o reset, ou seja, o nó jv é excluído do
a
processo de busca da categoria ativa dada pela equação (53), isto é, T jv assume o valor igual a
zero e então é escolhida uma nova categoria pela equação (53) para realizar novamente o
processo de ressonância. Este processo é executado até que a rede encontre uma categoria
ativa jv que satisfaça a equação (56). Caso a equação (57) não seja satisfeita, então o mesmo
processo descrito acima é repetido para o módulo Fuzzy ARTb, ou seja, exclui-se o nó kv do
processo de busca da categoria ativa ( Tkvb 0 ), escolhendo uma nova categoria através da
equação (54).
Após a identificação das categorias ativas em cada um dos módulos Fuzzy ART, utilizase o match-tracking com o objetivo de verificar se a categoria ativa em Fuzzy ARTa
corresponde à saída desejada apresentada em Fuzzy ARTb. Assim, aplica-se o critério de
vigilância apresentado na equação (58):
Y b W jvab
Yb
7.2.6
ab
(58)
Aprendizado
Após ocorrer o critério de vigilância dado pela equação (58), é feita a adaptação dos
pesos da rede neural Fuzzy ARTMAP. A adaptação dos pesos dos módulos Fuzzy ARTa e
Fuzzy ARTb é realizada conforme apresentado pelas equações (59) e (60), respectivamente.
80
Os pesos do módulo Inter-ART são adaptados conforme a equação (61) (CARPENTER et al.,
1992).
I
1 W
W jva novo I a W jva velho 1 W jva velho
(59)
Wkvb novo
(60)
b
Wkvb velho
b velho
kv
ab
W jv,k
1 , para k kv
ab
W jv,k
0 , para k kv
7.2.7
(61)
Algoritmo de Treinamento da Rede Neural Fuzzy ARTMAP
Com o propósito de facilitar a compreensão das etapas a serem realizadas no
treinamento da rede Fuzzy ARTMAP, Lopes (2005) elaborou um fluxograma explicativo
destas etapas por. Então, a seguir, serão apresentados todos os passos necessários para
realização do treinamento da rede neural Fuzzy ARTMAP:
Passo 1)
Leem-se todos os parâmetros da rede neural ( , , a , b , ab , e ).
Passo 2)
Inicialização das matrizes de pesos da rede neural Fuzzy ARTMAP (os valores
dos pesos das matrizes W a , W b e W ab são iguais a 1).
Passo 3)
Realiza-se o complemento do vetor de entrada (a), I a a a c , e do vetor de
saída (b), I b b bc .
Passo 4)
Verifica-se se a lista de padrões de treinamento foi concluída.
Se sim, o processo de treinamento é concluído;
Senão, vá ao Passo 5).
Passo 5)
Faz-se a a .
Passo 6)
Calcula-se a função de escolha Tkb :
T
b
k
I b Wkb
Wkb
, para k 1, 2, ... , N .
81
Passo 7)
Escolha da categoria da Fuzzy ARTb:
kv arg max Tkb , para k 1, 2, ... , N .
Passo 8)
Verificação do critério de vigilância da Fuzzy ARTb:
I b Wkb
Ib
b .
Se sim, vá ao Passo 9);
Senão, ocorre o reset: faz-se Tkvb 0 e retorna ao Passo 7).
Passo 9)
Calcula-se Y b Y1b Y2b ... YNb :
Ykb 1 , para k kv
Ykb 0 , para k 1, 2, ... , N ; k kv .
Passo 10) Atualização dos pesos da Fuzzy ARTb:
Wkvb novo I b Wkvb velho 1 Wkvb velho .
a
Passo 11) Calcula-se a função de escolha T j :
T
a
j
I a W ja
W ja
, para j 1, 2, ... , N .
Passo 12) Escolha da categoria da Fuzzy ARTa:
jv arg max T ja , para j 1, 2, ... , N .
Passo 13) Verificação do critério de vigilância da Fuzzy ARTa:
I a W ja
Ia
a .
Se sim, vá ao Passo 14);
82
a
Senão, ocorre o reset: faz-se T jv 0 e retorna ao Passo 12).
Passo 14) Verificação do critério de vigilância do módulo Inter-ART:
Y b W jvab
Yb
ab .
Se sim, vá ao Passo 15);
Senão, incrementa-se o parâmetro de vigilância a , a
I a W jva
Ia
, e faz-se
T jva 0 , retornando Passo 12).
Passo 15) Atualização dos pesos da Fuzzy ARTa:
W jva novo I a W jva velho 1 W jva velho .
ab
ab
ab
Passo 16) Atualização dos pesos do módulo Inter-ART, W jvab W jv,
1 W jv,2 ... W jv,N :
ab
W jv,k
1 , para k kv
ab
W jv,k
0 , para k 1, 2, ... , N ; k kv .
Passo 17) Retorna-se ao Passo 4).
sendo:
: operador fuzzy AND;
Wi
: i-ésima linha da matriz W ;
Wi , j
: componente da posição i, j da matriz W ;
arg máx T j : obtenção do índice correspondente do máximo valor entre os coeficientes T j (
j 1, 2, ... , N );
Tj
: j-ésimo coeficiente de escolha;
83
jv
: número do neurônio vencedor na rede Fuzzy ARTa;
kv
: número do neurônio vencedor na rede Fuzzy ARTb;
a
: valor inicial do parâmetro de vigilância da rede Fuzzy ARTa;
: valor do parâmetro (positivo e pequeno) para incremento do parâmetro a ;
7.2.8
Algoritmo de Teste da Rede Neural Fuzzy ARTMAP
A etapa de teste é realizada utilizando o procedimento descrito a seguir.
Passo 1) Compõem-se os vetores de teste a e I a , detonados a e I a , respectivamente.
Passo 2) Identifica-se o neurônio vencedor na rede neural Fuzzy ARTa ( jv ), sem realizar a
adaptação dos pesos.
Passo 3) Calcula-se I b e consequentemente b (DECANINI et al., 2011a):
b
c
c
c
I W jvabW b b1 b2 ... bMb b1 b2 ... b Mb
b b1 b2 ... b Mb
: saída codificada.
7.3
Comentários
Nesta seção foram apresentados os principais conceitos das redes neurais da família
ART, i.e., Fuzzy ART e Fuzzy ARTMAP, que têm como principal características a
estabilidade e plasticidade.
Também foram descritos os principais parâmetros utilizados nestas duas redes e seus
respectivos processos de treinamento. Além disso, para a rede Fuzzy ARTMAP,
apresentaram-se os procedimentos da etapa de teste.
85
8
METODOLOGIA
8.1
Introdução
A metodologia desenvolvida utiliza-se dos conceitos da transformada wavelet, lógica
fuzzy e redes neurais artificiais para realizar o diagnóstico de distúrbios, e.g., distúrbios de
tensão, curtos-circuitos e faltas de alta impedância, em sistemas de distribuição de energia
elétrica.
É executada permanentemente a aquisição dos sinais de tensão e de corrente obtidos na
saída do alimentador da subestação. Aplicando-se a AMR, estes sinais são decompostos e,
através de uma análise estatística e comparação direta dos coeficientes de detalhe, determinase o estado operativo do sistema, ou seja, se há ou não a presença de distúrbios. Caso seja
determinada a presença de qualquer tipo de distúrbio, aplicam-se os conceitos da TW para
decomposição das oscilografias de tensão e de corrente.
A partir das informações extraídas dos sinais de corrente, emprega-se o conceito
entropia de modo a agregar tais informações. Assim, utilizando um sistema fuzzy, é avaliado
se o distúrbio detectado corresponde a uma falta de alta impedância.
Caso este distúrbio não seja classificado como uma falta de alta impedância, então, as
informações de tensão e de corrente, obtidas pela TW, são agregadas via conceito energia.
Estes índices de tensão e de corrente compõem o vetor de entrada da rede neural Fuzzy
ARTMAP, após os mesmos serem pré-processados. A rede Fuzzy ARTMAP fornece em sua
saída o tipo de distúrbio presente no sistema, ou seja, distúrbio de tensão ou curto-circuito.
Constatada a presença de um distúrbio de tensão, são extraídos dos sinais de tensão
coeficientes comportamentais (assinatura) a AMR e o conceito entropia. Novamente, após
serem normalizados e codificados, estes coeficientes compõem o vetor de entrada de uma
segunda rede neural Fuzzy ARTMAP, a qual determina o tipo de distúrbio de tensão presente
no sistema.
No entanto, se detectada a presença de um curto-circuito, são extraídos três índices, i.e.,
s1 , s2 e s3 , dos sinais de corrente. Estes índices são transladados de modo a compor o vetor
86
de entrada de uma terceira rede neural Fuzzy ARTMAP, a qual fornece em sua saída as fases
envolvidas no curto-circuito. Para duas fases envolvidas, o índice Z é calculado, avaliando a
presença da terra na mesma.
8.2
Sistema de Detecção e de Decisão
Um sistema de detecção e de decisão é concebido levando em consideração a
permanente evolução das tecnologias empregadas nas subestações e o dinamismo inerente aos
sistemas de energia elétrica, e.g., distintos carregamentos, localização, e a presença de ruídos
nas oscilografias, a fim de obter maior robustez e flexibilidade. Este sistema é composto pelos
seguintes módulos: (1) módulo de detecção de distúrbios; (2) módulo de extração das
características de tensão e de corrente; (3) módulo avaliador de faltas de alta impedância; e (4)
módulo de decisão do tipo de distúrbio.
8.2.1
Módulo de Detecção de Distúrbios
O processo de detecção de distúrbios baseia-se nos sinais de tensão e de corrente
advindos do sistema de medição presente na saída do alimentador da subestação. Nesta etapa
é definido o janelamento do sinal, e.g., três ciclos, e o passo de análise, e.g., um ciclo.
Utilizando a AMR, as oscilografias de tensão e de corrente de cada uma das fases são
decompostas em dois níveis. Assim, calcula-se a média aritmética do valor absoluto dos
coeficientes de detalhe para cada nível de decomposição da oscilografia em análise
(DECANINI et al., 2011b):
Nj
d ij
d
k 1
k
ij
Nj
sendo:
i
: oscilografia em análise, i.e., Va, Vb, Vc, Ia, Ib e Ic;
j
: nível de decomposição, i.e., 1 e 2;
N j : número de coeficientes de detalhe do nível j ;
k
: k-ésimo coeficiente de detalhe do nível j referente à oscilografia i ;
(62)
87
d ij : média aritmética dos coeficientes de detalhe do nível j referente à oscilografia i .
Para cada valor absoluto do coeficiente de detalhe, calcula-se a sua variação em relação
à média aritmética obtida (DECANINI et al., 2011b):
k
varijk dijk d ij
(63)
sendo:
varijk : variação do k-ésimo coeficiente de detalhe em relação à média aritmética destes
coeficientes para o nível j referente à oscilografia i .
Posteriormente, obtém-se o desvio padrão do valor absoluto dos coeficientes de detalhe
sob avaliação (DECANINI et al., 2011b):
d
Nj
ij
k 1
k
ij
d ij
2
(64)
N j 1
sendo:
ij : desvio padrão dos coeficientes de detalhe do nível j referente à oscilografia i .
A detecção de distúrbios baseia-se no conjunto de regras apresentados nas Equações
(65) e (66). Estes dois conjuntos de equações correspondem a: (A) macroanálise, e (B)
microanálise. Por meio de (A) busca-se conhecer o comportamento geral do sinal comparando
a máxima variação dos coeficientes de detalhe a um percentual do desvio padrão, fixado pelo
engenheiro de proteção, propiciando maior imunidade à presença de ruídos nas oscilografias.
Em (B) realiza-se uma análise ponto-a-ponto, confrontando o maior coeficiente de detalhe
com o limite preestabelecido pelo engenheiro de proteção (DECANINI et al., 2011b):
se máx varij 1, 25 ij e máx dij ij , então ij 1
(65)
indica a existência de anormalidade no sistema;
se máx varij 1, 25 ij ou máx dij ij , então ij 0
indica operação normal do sistema.
(66)
88
sendo:
ij : parâmetro a ser especificado baseando-se na experiência do engenheiro de proteção e na
filosófica de proteção do sistema;
ij : índice indicativo do estado de operação do sistema.
Caso seja detectada qualquer anormalidade no sistema, o instante da ocorrência do
distúrbio é identificado.
8.2.2
Módulo de Extração das Características de Tensão e de Corrente
Nesta etapa, depois de detectada a presença de qualquer tipo de anormalidade no
sistema, selecionam-se dois ciclos pré-distúrbio a partir do instante de ocorrência do distúrbio
para as oscilografias de tensão e de corrente de cada uma das fases. Em seguida, aplica-se a
AMR para a decomposição em dois níveis destes sinais. Também, a partir do instante de
ocorrência do distúrbio, dois ciclos em distúrbio para cada oscilografia são selecionados,
aplicando os mesmos procedimentos para os ciclos pré-distúrbio.
8.2.3
Módulo Avaliador de Faltas de Alta Impedância
As informações extraídas a partir dos sinais de corrente, i.e., coeficientes de detalhe e de
aproximação dos ciclos pré e em distúrbio, são agregadas via entropia (DECANINI et al.,
2011a; MALANGE, 2010; UYAR et al., 2008). Desta forma, para cada uma das fases,
calculam-se os seguintes vetores:
ET k ,p ETdk1 ,p ETdk2 ,p ETak2 ,p
(67)
ET k ,e ETdk1 ,e ETdk2 ,e ETak2 ,e
(68)
sendo:
k
: oscilografia em análise, i.e., Ia, Ib e Ic;
ETdk1 ,p , ETdk1 ,e : entropia dos coeficientes de detalhe do nível 1 da oscilografia k para os
ciclos pré e em distúrbio, respectivamente;
89
ETdk2 ,p , ETdk2 ,e : entropia dos coeficientes de detalhe do nível 2 da oscilografia k para os
ciclos pré e em distúrbio, respectivamente;
ETak2 ,p , ETak2 ,e : energia dos coeficientes de aproximação do nível 2 a oscilografia k para os
ciclos pré e em distúrbio, respectivamente;
ET k ,p
: vetor entropia pré-distúrbio da oscilografia k ;
ET k ,e
: vetor entropia em distúrbio da oscilografia k .
Em seguida, a entropia em distúrbio é subtraída da entropia pré-distúrbio para adotar
como referência a operação normal do sistema, i.e., os ciclos pré-distúrbio, além de incorporar
na metodologia a variação do carregamento, como apresentado na equação (69) (DECANINI
et al., 2011a; MALANGE, 2010; UYAR et al., 2008):
ET k ,ref ΕT k ,e ΕT k ,p ETdk1 ,ref ETdk2,ref ETak2 ,ref
(69)
sendo:
ET k ,ref : vetor entropia da oscilografia k , tendo como referência a operação normal sistema.
Por conseguinte, avalia-se a presença das faltas de alta impedância no alimentador
através de um sistema fuzzy, o qual possui três entradas. As entradas utilizadas nesta análise
são calculadas através das equações (70), (71) e (72):
ET d1
ET d2
ET a2
ETdIa1 ,ref ETdIb,ref
ETdIc,ref
1
1
(70)
3
ETdIa2 ,ref ETdIb,ref
ETdIc,ref
2
2
(71)
3
ETaIa2 ,ref ETaIb,ref
ETaIc,ref
2
2
sendo:
ET d1 : entropia média do detalhe do nível 1;
ET d2 : entropia média do detalhe do nível 2;
3
(72)
90
ET a2 : entropia média da aproximação do nível 2;
Analisando os valores destes três índices, os vértices dos conjuntos fuzzy são
determinado de maneira que este módulo seja capaz de distinguir as faltas de alta impedância
dos demais distúrbios.
8.2.4
Módulo de Decisão do Tipo de Distúrbios
Utilizando o conceito energia, os coeficientes de detalhe e de aproximação dos ciclos
pré e em distúrbio, obtidos no módulo de extração das características de tensão e de corrente,
são agregados via conceito energia (DECANINI et al., 2011a; MALANGE, 2010; UYAR et
al., 2008). Desta forma, obtêm-se os vetores apresentados nas equações (73) e (74):
EG k ,p EGdk1,p EGdk2,p EGak2,p
(73)
EG k ,e EGdk1,e EGdk2,e EGak2,e
(74)
sendo:
k
: oscilografia em análise, i.e., Va, Vb, Vc, Ia, Ib e Ic;
EGdk1,p , EGdk1,e : energia dos coeficientes de detalhe do nível 1 da oscilografia k para os
ciclos pré e em distúrbio, respectivamente;
EGdk2,p , EGdk2,e : energia dos coeficientes de detalhe do nível 2 da oscilografia k para os
ciclos pré e em distúrbio, respectivamente;
EGak2,p , EGak2,e : energia dos coeficientes de aproximação do nível 2 da oscilografia k para
os ciclos pré e em distúrbio, respectivamente;
EG k ,p
: vetor energia pré-distúrbio da oscilografia k ;
EG k ,e
: vetor energia em distúrbio da oscilografia k .
Com o propósito de obter uma análise completa e detalhada do tipo de distúrbio, as
energias obtidas para os ciclos pré-distúrbio são utilizadas como referência da operação
normal do sistema. Assim, de cada energia obtida a partir dos coeficientes em distúrbio é
91
subtraída a energia pré-distúrbio, como apresentado pela equação (75) (DECANINI et al.,
2011a; MALANGE, 2010; UYAR et al., 2008):
EG k ,ref ΕG k ,e ΕG k ,p EGdk1,ref EGdk2,ref EGak2,ref
(75)
sendo:
EG k ,ref : vetor energia da oscilografia k , tendo como referência a operação normal sistema.
Utilizando as energias obtidas, tanto para os sinais de tensão como para os sinais de
corrente, é possível compor o vetor característico do tipo de distúrbio, descrito pela equação
(76):
Γ EGVa,ref EGVb,ref EGVc,ref EG Ia,ref EG Ib,ref EG Ic,ref
(76)
sendo:
Γ : vetor característico do tipo de distúrbio.
Analisando as Equações (73)-(75), observa-se que cada vetor energia ( EG k ,ref ) possui
dimensão igual a três. Para compor o vetor característico do tipo de distúrbio ( Γ ) são
utilizados seis vetores EG k ,ref , cada um referente a uma oscilografia, i.e., Va, Vb, Vc, Ia, Ib e
Ic. Assim, tem-se que a dimensão do vetor Γ é igual a dezoito.
A decisão do tipo de distúrbio presente no sistema é feita por uma rede neural Fuzzy
ARTMAP. Os vetores de entrada desta rede devem estar compreendidos no intervalo 0,1 .
Portanto, o vetor característico do tipo de distúrbio é normalizado e codificado, permitindo
uma maior generalização de projeto e a manutenção da informação do sinal (positivo e
negativo) (DECANINI et al., 2011a). O vetor de entrada da rede neural Fuzzy ARTMAP do
módulo de classificação ( a ) é descrito pela equação (77):
a Λ Ω
(77)
sendo:
Λ 1 2 ... 18
com:
(78)
92
i
i
máx
(79)
máx máx i , para i 1, 2, ... , 18 .
As componentes do vetor Ω são definidas a seguir:
se i 0 , então i 1
(80)
se i 0 , então i 0
para i 1, 2, ... , 6 .
Esta codificação é necessária para distinguir os valores negativos dos positivos de cada
um dos i .
Como mencionado anteriormente, este módulo emprega uma rede neural Fuzzy
ARTMAP, a qual realiza seu treinamento de maneira supervisionada. A entrada da rede
neural ( a ) corresponde aos vetores comportamentais Λ e Ω . O vetor Λ representa as
características normalizadas (corrente e tensão) do tipo de distúrbio, e o vetor Ω o sinal de
cada característica normalizada. O estímulo de saída ( b ) é codificado para representar o tipo
de distúrbio presente no sistema. Nesta etapa, os tipos de distúrbios que podem estar presentes
no sistema são: distúrbios de tensão ou curtos-circuitos. A Tabela 1 apresenta a codificação
para os possíveis tipos de distúrbios que podem estar presentes no sistema utilizando 2 bits.
Tabela 1 – Codificação do tipo de distúrbio
Tipo de Distúrbio
Codificação de Saída ( b )
Distúrbio de Tensão
[0 1]
Curto-Circuito
[1 0]
Fonte: Elaboração do próprio autor.
8.3
Sistema de Diagnóstico de Distúrbios de Tensão
O sistema de diagnóstico de distúrbios de tensão é desenvolvido de maneira que possa
ser facilmente modificado para atender a constante evolução do setor elétrico. Para isso, o
mesmo integra técnicas de processamento de dados e sistemas inteligentes. Este sistema é
93
subdividido em: (1) módulo de extração das características de tensão; e (2) módulo de
classificação de distúrbios de tensão.
8.3.1
Módulo de Extração das Características de Tensão
Após o sistema de detecção e de decisão classificar o tipo de distúrbio como um
distúrbio de tensão (saída do módulo de decisão do tipo de distúrbio igual a [0 1]) os ciclos
pré e em distúrbio para os sinais de tensão são decompostos em quatro níveis pela AMR. Em
cada nível de resolução, aplica-se o conceito de entropia de maneira a agregar os coeficientes
de detalhe e de aproximação. Assim, são compostos os vetores descritos pelas equações (81) e
(82):
ET k ,p ETdk1 ,p ETdk2 ,p ETdk3 ,p ETdk4,p ETak4 ,p
(81)
ET k ,e ETdk1 ,e ETdk2 ,e ETdk3 ,e ETdk4 ,e ETak4 ,e
(82)
sendo:
k
: oscilografia de tensão em análise, i.e., Va, Vb e Vc;
ETdk1 ,p , ETdk1 ,e : entropia dos coeficientes de detalhe do nível 1 da oscilografia k para os
ciclos pré-distúrbio e em distúrbio, respectivamente;
ETdk2 ,p , ETdk2 ,e : entropia dos coeficientes de detalhe do nível 2 da oscilografia k para os
ciclos pré-distúrbio e em distúrbio, respectivamente;
ETdk3 ,p , ETdk3 ,e : entropia dos coeficientes de detalhe do nível 3 da oscilografia k para os
ciclos pré-distúrbio e em distúrbio, respectivamente;
ETdk4 ,p , ETdk4 ,e : entropia dos coeficientes de detalhe do nível 4 da oscilografia k para os
ciclos pré-distúrbio e em distúrbio, respectivamente;
ETak4 ,p , ETak4 ,e : entropia dos coeficientes de aproximação do nível 4 da oscilografia k para os
ciclos pré-distúrbio e em distúrbio, respectivamente;
ET k ,p
: vetor entropia pré-distúrbio da oscilografia k ;
ET k ,e
: vetor entropia em distúrbio da oscilografia k .
94
Similar ao sistema anterior, a entropia obtida para os ciclos pré-distúrbio são utilizadas
como referência do estado normal de operação. Para cada entropia em distúrbio ( ET k ,e )
subtrai-se o valor da entropia pré-distúrbio ( ET k ,p ), compondo o vetor apresentado na
equação (83) (DECANINI et al., 2011a; MALANGE, 2010; UYAR et al., 2008):
ET k ,ref ET k ,durante ET k ,pré ETdk1 ,ref ETdk2 ,ref ETdk3 ,ref ETdk4 ,ref ETak4 ,ref
(83)
sendo:
ET k ,ref : vetor entropia da oscilografia k , tendo como referência a operação normal do
sistema.
O vetor característico de distúrbio de tensão é composto utilizando somente os dois
últimos componentes do vetor ET k ,ref , para cada oscilografia de tensão (Va, Vb e Vc), ou
seja, utilizam-se somente as características agregadas de detalhe e de aproximação do quarto
nível. Estes componentes são selecionados após a realização de um processo exaustivo para
determinar a combinação de coeficientes que fornece o melhor índice de acerto. Com isso, o
vetor característico do distúrbio de tensão é representado por:
DT ETdVa,ref
ETdVa,ref
ETdVb,ref
ETdVb,ref
ETdVc,ref
ETdVc,ref
4
5
4
5
4
5
(84)
sendo:
DT : vetor característico do distúrbio de tensão.
Analisando as equações (81)-(83), observa-se que os vetores ET k ,p e ET k ,e possuem,
cada um deles, dimensão igual a cinco. Consequentemente, o vetor ET k ,ref também possui
dimensão igual a cinco. Ao compor o vetor característico do distúrbio de tensão, utiliza-se
somente o quarto e o quinto componente do vetor ET k ,ref , para cada oscilografia de tensão.
Com isso, a dimensão do vetor característico do distúrbio de tensão ( DT ) é igual a seis.
8.3.2
Módulo de Classificação de Distúrbios de Tensão
Este módulo também emprega uma rede neural Fuzzy ARTMAP. Como o vetor de
entrada da mesma deve estar compreendido no intervalo 0,1 , o vetor característico de
distúrbio de tensão ( DT ) é normalizado e codificado, satisfazendo o intervalo exigido para a
95
entrada da rede neural e mantendo a informação do sinal de cada componente do vetor DT
(DECANINI et al., 2011a).
O vetor de entrada da rede ( a ) é definido da seguinte forma:
a Ψ Φ
(85)
sendo:
Ψ 1 2 ... 6
(86)
com:
i
ATi
ATmáx
(87)
ATmáx máx ATi , para i 1, 2, ... ,6 .
Os componentes do vetor Φ são definidos por:
se i 0 , então i 1
se i 0 , então i 0
(88)
para i 1, 2, ... ,6 .
Assim, o vetor de entrada, definido pelo vetor a , é composto pelos vetores Ψ e Φ . O
vetor Ψ representa as características normalizadas (tensão) do tipo de distúrbio de tensão, e o
vetor Φ o sinal de cada característica normalizada. A saída da rede neural, definida pelo
vetor b , é codificada para fornecer como saída o tipo de distúrbio de tensão presente no
sistema. A Tabela 2 apresenta a codificação de saída para os possíveis distúrbios de tensão
utilizando 4 bits.
96
Tabela 2 – Codificação do tipo de distúrbio de tensão
Distúrbio de Tensão
Codificação de Saída ( b )
Swell (Elevação)
[0 0 0 1]
Sag (Afundamento)
[0 0 1 0]
Outage (Interrupção)
[0 0 1 1]
Harmônico
[0 1 0 0]
Swell com Harmônico
[0 1 0 1]
Sag com Harmônico
[0 1 1 0]
Transitório Oscilatório
[0 1 1 1]
Fonte: Elaboração do próprio autor.
8.4
Sistema de Diagnóstico de Curtos-Circuitos
Um sistema para execução do diagnóstico de curtos-circuitos robusto e eficiente é
concebido levando em consideração as diversas variáveis influentes no processo de
diagnóstico. Este sistema possui os seguintes módulos: módulo de extração das características
de corrente, módulo de classificação de curtos-circuitos e módulo de avaliação da presença da
terra.
8.4.1
Módulo de Extração das Características de Corrente
Após a identificação da presença de um curto-circuito no sistema (saída do módulo de
classificação do tipo de distúrbio igual a [1 0]), este módulo extrai dos sinais de corrente (Ia,
Ib e Ic). Assim, estas informações são utilizadas na classificação dos curtos-circuitos.
A partir dos ciclos em distúrbio , identifica-se o valor máximo da corrente elétrica em
cada fase (terna {a, b, c}). Por conseguinte, são calculadas as seguintes grandezas
(DECANINI, 2008; MAHANTY; DUTTA GUPTA, 2007; TONELLI-NETO et al., 2011b):
sa
MIa
MIb
sb
MIb
MIc
sendo:
MIa: valor máximo absoluto da corrente elétrica na fase a;
MIb: valor máximo absoluto da corrente elétrica na fase b;
sc
MIc
MIa
(89)
97
MIc: valor máximo absoluto da corrente elétrica na fase c;
As grandezas sa, sb e sc são normalizadas e representadas de forma relativa, pois se
buscam índices característicos do estado operativo do sistema elétrico sob a influência de um
curto-circuito (DECANINI, 2008; MAHANTY; DUTTA GUPTA, 2007; TONELLI-NETO et
al., 2011b):
smáx máx sa,sb,sc
na
sa
smáx
s1 na nb
nb
sb
smáx
s2 nb nc
(90)
nc
sc
smáx
s3 nc na
(91)
(92)
Os índices s1 , s2 e s3 estabelecem padrões característicos do estado operativo do
sistema sob a influência de um curto-circuito. Analisando a equação (92), tem-se que:
s1 s2 s3 0
(93)
Consequentemente, pode-se expressar s3 por:
s3 s1 s2
(94)
A dependência do índice s3 em relação aos índices s1 e s2 facilita o processo de
classificação de curtos-circuitos.
Os valores destes índices estão compreendidos no intervalo 1, 1 . Sua variação
depende do tipo de curto-circuito (monofásico, bifásico ou trifásico), do carregamento do
sistema, do ângulo de inserção, da resistência de falta, entre outros.
8.4.2
Módulo de Classificação de Curtos-Circuitos
A classificação dos curtos-circuitos é executada por outra rede neural Fuzzy ARTMAP.
Como os índices s1 , s2 e s3 pertencem ao intervalo 1, 1 , necessita-se realizar uma
translação de eixos para que os mesmos estejam compreendidos no intervalo
0,1
(TONELLI-NETO et al., 2011b). Esta translação de eixos é executada como mostrado pela
equação (95):
98
sit
si 1
, para i 1, ... , 3
2
(95)
sendo:
si : índice característico do estado operativo do sistema;
sit : índice característico do estado operativo do sistema transladado.
Assim, os índices s1t , s2t e s3t compõem o vetor de entrada da rede neural Fuzzy
ARTMAP. A saída da rede é codificada de maneira que possa fornecer o tipo de curtocircuito presente no sistema, ou seja, quais fases estão envolvidas no curto-circuito, e também
o nível da resistência de falta (baixa ou alta). A codificação para cada tipo de curto-circuito é
apresentada na Quadro 5.
Quadro 5 – Codificação dos tipos de curto-circuito
Diagnóstico
Fase Envolvida
Fase a
Fase b
Fase c
a
1
0
0
b
0
1
0
c
0
0
1
ab
1
1
0
ac
1
0
1
bc
0
1
1
abc
1
1
1
Resistência de Falta
Fonte: Elaboração do próprio autor.
sendo:
0
1
0
1
0
1
0
1
0
1
0
1
0
1
99
Fase a, b ou c: 0 fase não está envolvida no curto-circuito;
1 fase está envolvida no curto-circuito.
Resistência de Falta: 0 resistência de falta baixa ( 0 R f 50 Ω );
1 resistência de falta alta ( 50 R f 100 Ω ).
8.4.3
Módulo de Avaliação da Presença da Terra
Caso o módulo de classificação de curtos-circuitos forneça em sua saída a codificação
de uma falta bifásica, este não consegue diferenciar se esta possui ou não conexão com a
terra. No caso de curtos-circuitos monofásicos e trifásicos, esta avaliação é desnecessária. Em
faltas monofásicas, estas já possuem a ligação com a terra (a-g, b-g e c-g). Por ser tratarem de
faltas simétricas, não há como determinar se existe ou não a presença da terra em faltas
trifásicas. Neste sentido, existe a necessidade do cálculo de um novo índice para executar esta
avaliação.
Utilizando os dois ciclos em distúrbios dos sinais de corrente, calcula-se o valor do
índice definido pela equação (96) (DECANINI, 2008; TONELLI-NETO et al., 2011b):
Z
máx Ia Ib Ic
3
(96)
O parâmetro Z é baseado nos conceitos da corrente de sequência zero. Havendo curtoscircuitos que possuem ligação com a terra, este índice apresentara valores muito superiores ao
dos curtos-circuitos sem ligação com a terra. Então, o seguinte critério é utilizado:
se Z Z máx , então s0 1
(97)
indica a presença da terra no curto-circuito;
se Z Z máx , então s0 0
indica a ausência da terra no curto-circuito.
sendo:
Zmáx: valor limite especificado baseado na experiência do engenheiro de proteção.
(98)
100
8.5
Comentários
Apresentou-se a metodologia utilizada na formulação do controle preventivo em
sistemas de distribuição de energia elétrica, o qual utiliza das oscilografias de tensão e de
corrente para realização do diagnóstico.
O sistema proposto utiliza-se da transformada wavelet, lógica fuzzy e redes neurais
artificais para detecção e classificação de distúrbios de tensão, curtos-circuitos e faltas de alta
impedância. Além disso, o emprego da lógica fuzzy e de redes neurais artificiais possibilita a
obtenção de um sistema robusto em relação às seguintes variáveis: variação do carregamento
do sistema, localização e ângulo de inserção do distúrbio.
Através da aplicação desta metodologia em um conjunto de dados de distúrbios,
extraem-se alguns resultados, que serão apresentados na próxima seção.
101
9
APLICAÇÕES E RESULTADOS
9.1
Introdução
Através da aplicação da metodologia proposta nas simulações presentadas na Seção 3,
foram obtidos resultados, os quais serão abordados nesta seção. A partir destes resultados,
discutir-se-á como cada um foi obtido. Tais resultados estarão dispostos em tabelas e figuras,
de modo a facilitar a compreensão.
9.2
Padrões de Treinamento e Teste
Para realizar o treinamento, teste e a validação da metodologia proposta para todos os
sistemas, foram selecionados distúrbios de maneira pseudoaleatória. A seleção destes para a
realização do treinamento é resultado do emprego de três redes neurais Fuzzy ARTMAP em
todo o processo, as quais necessitam de um treinamento adequado para que assim possam
realizar o diagnóstico de maneira eficiente. O Quadro 6 apresenta o total de distúrbios
selecionados para compor o conjunto de treinamento e teste.
Quadro 6 – Total de distúrbios selecionados para treinamento e teste
Distúrbio
Treinamento
Teste
Distúrbio de Tensão
500
124
Curto-Circuito
1000
440
Falta de Alta Impedância
*
25
Total
1500
589
Fonte: Elaboração do próprio autor.
* Para a realização do diagnóstico de faltas de alta impedância não foi necessário a seleção de
nenhum padrão de treinamento, pois o módulo para determinação desta não utiliza nenhum
tipo de rede neural.
102
9.3
Sistema de Detecção e de Decisão
9.3.1
Módulo de Detecção de Distúrbios
A partir do total de distúrbios de teste do Quadro 6, realizou-se o procedimento
contínuo de detecção de distúrbios. Nesta etapa, empregou-se a wavelet mãe Daubechies com
um filtro de quarta (db4) para realizar a AMR. Os valores dos parâmetros limite utilizados
pelo engenheiro de proteção para averiguação do estado operativo do sistema são
apresentados na Tabela 3.
Tabela 3 – Valores dos parâmetros limite para detecção de distúrbios
Parâmetro
Nível de Decomposição
Primeiro
Segundo
V
0,005
0,07
I
0,00013
0,00095
Fonte: Elaboração do próprio autor.
Este módulo apresentou 100% de acerto no diagnóstico dos distúrbios de tensão, dos
curtos-circuitos e das faltas de alta impedância, i.e., identificação de todos os 589 distúrbios,
com alto desempenho computacional.
9.3.2
Módulo de Extração das Características de Tensão e de Corrente
Detectada qualquer tipo de anormalidade, a partir do instante da ocorrência do distúrbio,
são extraídas características pré e em distúrbio de todas as oscilografias (Va, Vb, Vc, Ia, Ib e
Ic) através da aplicação da AMR. Nesta etapa também foi empregada a wavelet mãe db4.
9.3.3
Módulo Avaliador de Faltas de Alta Impedância
Neste módulo, as características extraídas dos sinais de corrente, i.e., coeficientes de
detalhe e de aproximação, são agregadas utilizando os conceitos da entropia com nível de
energia igual a 1,0. Assim, após serem calculados os parâmetros das equações (70)-(72), os
mesmos são analisados via sistema fuzzy, apresentado na Figura 28, de modo a avaliar a
presença de faltas de alta impedância no alimentador.
103
Figura 28 – Sistema fuzzy utilizado na avaliação da presença de faltas de alta impedância no
alimentador.
Fonte: Elaboração do próprio autor.
O sistema fuzzy apresentado acima possui três entradas e uma saída. Para a primeira
entrada, “Média das Entropias de Corrente – Detalhe Nível 1”, utiliza-se três conjuntos fuzzy,
apresentados na Figura 29, sendo os vértices de cada um dos conjuntos definidos na Tabela 4.
Figura 29 – Conjuntos fuzzy da entrada "Média das Entropias de Corrente - Detalhe Nível 1".
Fonte: Elaboração do próprio autor.
Tabela 4 – Vértices dos conjuntos fuzzy da entrada "Médias das Entropias de Corrente Detalhe Nível 1” (continua)
Conjunto
Vértice 1
Vértice 2
Vértice 3
P
0
137,5
275,0
104
Tabela 4 - Vértices dos conjuntos fuzzy da entrada "Médias das Entropias de Corrente Detalhe Nível 1” (conclusão)
Conjunto
Vértice 1
Vértice 2
Vértice 3
M
225,0
500,0
775,0
G
725,0
862,5
1000,0
Fonte: Elaboração do próprio autor.
sendo:
P : pequeno;
M : médio;
G : grande.
A segunda entrada, “Média das Entropias de Corrente – Detalhe Nível 2”, também
utiliza três conjuntos fuzzy, apresentados na Figura 30, sendo os vértices de cada um dos
conjuntos definidos na
Figura 30 – Conjuntos fuzzy da entrada “Média das Entropias de Corrente - Detalhe Nível 2.
Fonte: Elaboração do próprio autor.
Tabela 5 - Vértices dos conjuntos fuzzy da entrada “Médias das Entropias de Corrente –
Detalhe Nível 2”
Conjunto
Vértice 1
Vértice 2
Vértice 3
P
0
137,5
275,0
M
225,0
500,0
775,0
G
725,0
862,5
1000,0
Fonte: Elaboração do próprio autor.
105
sendo:
P : pequeno;
M : médio;
G : grande.
A última entrada, “Média das Entropias de Corrente – Aproximação Nível 2”, possui
seis conjuntos fuzzy, como mostra a Figura 31, sendo cada um de seus vértices apresentados
na Tabela 6.
Figura 31 – Conjuntos fuzzy da entrada “Média das Entropias de Corrente - Aproximação
Nível 2”.
Fonte: Elaboração do próprio autor.
Tabela 6 – Vértices dos conjuntos fuzzy da entrada "Média das Entropias de Corrente Aproximação Nível 2"
Conjunto
Vértice 1
Vértice 2
Vértice 3
NG
-1000000,0
-862500,0
-725000,0
NM
-775000,0
-500000,0
-225000,0
NP
-275000,0
-137500,0
0
PP
0
137500,0
275000,0
PM
225000,0
500000,0
775000,0
PG
725000,0
862500,0
1000000,0
Fonte: Elaboração do próprio autor
sendo:
106
NG : negativo grande;
NM : negativo médio;
NP : negativo pequeno;
PP : positivo pequeno;
PM : positivo médio;
PG : positivo grande.
A única saída deste sistema fuzzy, “Falta de Alta Impedância Presente?”, indicará se o
distúrbio, presente no sistema de distribuição, é ou não uma falta de alta impedância. Os
conjuntos desta saída são apresentados na Figura 32, e os vértices dos mesmos na Tabela 7.
Figura 32 – Conjuntos fuzzy da saída "Falta de Alta Impedância Presente?".
Fonte: Elaboração do próprio autor.
Tabela 7 – Vértices dos conjuntos fuzzy da saída "Falta de Alta Impedância Presente?"
Conjunto
Vértice 1
Vértice 2
Vértice 3
NÃO
0
25,0
50,0
SIM
50,0
75,0
100,0
Fonte: Elaboração do próprio autor.
sendo:
NÃO : falta de alta impedância não presente no sistema;
SIM : falta de alta impedância presente no sistema.
107
A presença de faltas de alta impedância no alimentador foram realizadas por meio de 9
regras fuzzy, descritas na Tabela 8.
Tabela 8 – Regras fuzzy utilizadas na avaliação de faltas de alta impedância
ET d1
ET d2
ET a2
Falta de Alta Impedância Presente?
P
P
PP
NÃO
P
P
NP
NÃO
P
M
PP
NÃO
P
M
NP
NÃO
P
P
PM
NÃO
P
P
PG
NÃO
M
P
PP
SIM
M
M
PP
SIM
G
M
PP
SIM
Fonte: Elaboração do próprio autor.
A interpretação da Tabela 8 segue o seguinte padrão. Tomando a primeira e a última
linha como exemplos, têm-se:
se ET d1 é P e ET d2 é P e ET a2 é PP, então “Falta de Alta Impedância Presente?” é NÃO.
se ET d1 é G e ET d2 é M e ET a2 é PP, então “Falta de Alta Impedância Presente?” é SIM.
As demais linhas da Tabela 8 seguem a mesma interpretação.
O acerto deste módulo foi de 100%, i.e., dos 589 distúrbios detectados pelo módulo de
detecção de distúrbios, este foi capaz de determinar que 25 eram faltas de alta impedância e os
outros 564 não eram faltas de alta impedância.
9.3.4
Módulo de Decisão do Tipo de Distúrbio
Este módulo é ativado quando o distúrbio detectado no alimentador não for classificado
como uma falta de alta impedância. Nesta etapa, será feita a decisão por quais outros tipos de
distúrbios podem estar presentes no alimentador, i.e., distúrbio de tensão ou curto-circuito.
Para isso, emprega-se uma rede neural Fuzzy ARTMAP, a qual provê maior desempenho
computacional do que as técnicas tradicionais utilizadas na literatura, e.g., algoritmo
backpropagation. Esta rede foi treinada com um total de 1500 distúrbios, i.e., somente
108
distúrbios de tensão e curtos-circuitos, como apresentado no Quadro 6. A realização do
diagnóstico foi executada utilizando os 564 padrões que não foram classificados como faltas
de alta impedância. Além disso, a eficiência da rede neural Fuzzy ARTMAP está diretamente
relacionada à realização de um treinamento adequado e à correta especificação de seus
parâmetros. Neste contexto, foram avaliadas diferentes topologias, sendo os valores dos
parâmetros, o tempo de treinamento e o percentual de acerto de cada topologia apresentados
no Quadro 7.
Quadro 7 – Resultados referentes à variação dos parâmetros da rede neural Fuzzy ARTMAP
utilizada na decisão do tipo de distúrbio
Parâmetros
Topologia
1
2
3
4
5
6
0,1
0,1
0,1
0,1
0,1
0,1
1,0
1,0
1,0
1,0
1,0
1,0
a
0,10
0,60
0,70
0,80
0,90
0,95
b
1,0
1,0
1,0
1,0
1,0
1,0
ab
0,95
0,95
0,95
0,95
0,95
0,95
0,001
0,001
0,001
0,001
0,001
0,001
Tempo de Treinamento (s)
7,81
7,80
7,81
7,82
7,87
24,80
Acerto (%)
88,83
88,83
96,99
99,82
100,00
84,75
Fonte: Elaboração do próprio autor.
A melhor especificação dos parâmetros para o módulo de decisão do tipo de distúrbio
corresponde à descrita na topologia 5, a qual obteve uma taxa de acerto de 100%.
9.4
Sistema de Diagnóstico de distúrbios de Tensão
Caso seja determinada, pelo módulo de decisão do tipo de distúrbio, que há a presença
de um distúrbio de tensão no alimentador, ativa-se a etapa na qual será realizado o diagnóstico
desta. Para processo de diagnóstico de distúrbios de tensão, foram utilizados 500 distúrbios
para o treinamento do sistema de classificação do tipo de distúrbio de tensão, conforme
Quadro 6. A execução do teste, e consequentemente validação da metodologia, contou com
todos os distúrbios caracterizados como distúrbios de tensão (124, de acordo com o Quadro
109
6), uma vez que módulo de decisão do tipo de distúrbios distinguiu os distúrbios de tensão
dos curtos-circuitos.
9.4.1
Módulo de Extração das Características de Tensão
São extraídas as características das oscilografias de tensão de cada uma das fases
através da aplicação da AMR com quatro níveis de decomposição, utilizando novamente a
wavelet mãe db4. Os coeficientes de detalhe e de aproximação referentes ao quarto nível são
agregados através do conceito entropia.
9.4.2
Módulo de Classificação de Distúrbios de Tensão
A utilização da entropia como técnica de fusão de dados (data fusion) pode influenciar
no resultado final do diagnóstico de distúrbios de tensão, devido esta necessitar da
especificação de um nível de energia. Por conseguinte, a eficiência da rede neural Fuzzy
ARTMAP está diretamente relacionada à realização de um treinamento adequado e à correta
especificação de seus parâmetros. Neste contexto, para três diferentes níveis de energia, foram
avaliadas diferentes topologias de rede, as quais são apresentadas no Quadro 8, juntamente
com o tempo de treinamento e o percentual de acerto do sistema de diagnóstico de distúrbios
de tensão.
Quadro 8 – Percentual de acerto e tempo de treinamento do sistema de diagnóstico de
distúrbios de tensão para diferentes topologias e distintos níveis de energia (continua)
Parâmetros
Topologia
1
2
3
0,1
0,1
0,1
1,0
1,0
1,0
a
0,80
0,85
0,90
b
1,0
1,0
1,0
ab
0,95
0,95
0,95
0,00001
0,00001
0,00001
T.T.
Acerto
(s)
(%)
1,0
0,58
96,77
2,0
1,03
86,29
3,0
0,83
76,61
1,0
0,59
95,97
2,0
1,04
84,68
3,0
0,84
76,61
1,0
0,61
95,97
2,0
1,04
84,68
3,0
0,85
76,61
N.E.
110
Quadro 8 - Percentual de acerto e tempo de treinamento do sistema de diagnóstico de
distúrbios de tensão para diferentes topologias e distintos níveis de energia (conclusão)
Parâmetros
Topologia
4
5
6
7
8
0,1
0,1
0,1
0,1
0,1
1,0
1,0
1,0
1,0
1,0
a
0,98
0,80
0,85
0,90
0,98
b
1,0
1,0
1,0
1,0
1,0
ab
0,95
0,95
0,95
0,95
0,95
0,00001
0,001
0,001
0,001
0,001
T.T.
Acerto
(s)
(%)
1,0
0,68
95,16
2,0
1,16
84,68
3,0
0,90
75,81
1,0
1,29
91,94
2,0
1,97
75,81
3,0
2,32
75,00
1,0
1,27
91,13
2,0
1,99
75,00
3,0
2,30
75,00
1,0
1,29
91,13
2,0
1,97
75,00
3,0
2,31
75,00
1,0
1,31
88,71
2,0
2,19
79,84
3,0
2,63
76,61
N.E.
Fonte: Elaboração do próprio autor.
sendo:
N.E.: nível de energia;
T.T.: tempo de treinamento.
A melhor especificação dos parâmetros da rede para o módulo de diagnóstico de
distúrbios de tensão corresponde à descrita na topologia 1, a qual obteve uma taxa de acerto
de 96,77%, para um nível de energia de 1,0. Uma completa descrição da eficiência desta
topologia é apresentada no Quadro 9, a qual fornece o número de padrões de treinamento e
teste, e o índice de acerto obtido para cada diagnóstico.
111
Quadro 9 – Descrição detalhada da eficiência do sistema de classificação de distúrbios de
tensão para a melhor topologia
Diagnóstico
Padrões de Treinamento
Padrões de Teste
Acerto (%)
Swell
52
20
100,00
Sag
57
15
80,00
Outage
42
6
100,00
Harmônico
119
25
100,00
Swell com Harmônico
74
22
100,00
Sag com Harmônico
76
20
95,00
Transitório Oscilatório
80
16
100,00
Total
500
124
96,77
Fonte: Elaboração do próprio autor.
Analisando o Quadro 9, tem-se que os distúrbios sag e sag com harmônico não
apresentaram 100% de acerto. Os distúrbios de tensão são representadas pelas entropias dos
coeficientes de detalhe e de aproximação do quarto nível, considerando cada uma das fases,
após sofrerem normalização e codificação. A Figura 33 apresenta o comportamento da
entropia, com um nível de energia igual a 1,0, dos coeficientes de detalhe e aproximação para
cada distúrbio de tensão.
Figura 33 – Principais características de cada distúrbio de tensão.
Fonte: Elaboração do próprio autor.
112
Devido à semelhança dos valores dos índices característicos dos distúrbios sag, outage e
sag com harmônico, i.e., diferenciam apenas no valor da amplitude, a rede neural, na etapa de
teste, pode então estar classificando um destes três distúrbios erroneamente, e.g., classificar
um distúrbio sag como um sag com harmônico ou outage.
9.5
Sistema de Diagnóstico de Curtos-Circuitos
O diagnóstico de curtos-circuitos é ativado se o módulo de decisão do tipo de distúrbio
determinar que exista a ocorrência de um curto-circuito no sistema de distribuição de energia.
De acordo com o Quadro 6, no processo de diagnóstico de curtos-circuitos, 1000 distúrbios
foram empregados no treinamento do sistema de classificação do tipo de curto-circuito. Para a
análise da eficiência da metodologia proposta, foram utilizados os 440 distúrbios detectados e
classificados como curtos-circuitos no sistema de detecção e de decisão.
9.5.1
Módulo de Extração das Características de Corrente
A partir das oscilografias de corrente, são extraídos três índices ( s1 , s2 e s3 ). Os índices
s1 , s2 e s3 definem com exatidão as fases envolvidas no curto-circuito. Neste sentido, a
Figura 34 mostra a distribuição espacial destes índices para os possíveis tipos de curtocircuito.
Figura 34 – Distribuição espacial dos índices representativos das fases envolvidas.
Fonte: Elaboração do próprio autor.
113
9.5.2
Módulo de Classificação de Curtos-Circuitos
Utilizando como entrada os índices comportamentais de corrente, o módulo de
classificação de curtos-circuitos determinará as fases envolvidas no curto-circuito e o nível da
resistência de falta, i.e., resistência baixa ( 0 R f 50 Ω ) ou alta ( 50 R f 100 Ω ). Se a
rede neural fornecer em sua saída duas fases envolvidas, i.e., um curto-circuito bifásico, o
índice s4 é calculado, com o propósito de determinar a presença ou não da terra.
A eficiência na classificação de curtos-circuitos está diretamente relacionada à
realização de um treinamento adequado e à correta especificação dos parâmetros da rede
neural Fuzzy ARTMAP empregada nesta estapa. Desta forma, foram analisadas diferentes
topologias. Os parâmetros utilizados em cada topologia, o tempo de treinamento e o
percentual de acerto são apresentados no Quadro 10.
Quadro 10 – Tempo de treinamento e percentual de acerto do sistema de diagnóstico de
curtos-circuitos para diferentes topologias
Parâmetros
Topologia
a
b
ab
T.T (s)
Acerto (%)
1
0,10
1,0
0,85
1,0
0,95
0,001
2,93
97,95
2
0,10
1,0
0,90
1,0
0,95
0,001
2,96
97,73
3
0,10
1,0
0,98
1,0
0,95
0,001
3,38
93,41
4
0,10
1,0
0,85
1,0
0,95
0,0001
2,23
98,18
5
0,10
1,0
0,90
1,0
0,95
0,0001
2,24
97,95
6
0,10
1,0
0,98
1,0
0,95
0,0001
2,76
93,64
7
0,50
1,0
0,85
1,0
0,95
0,001
2,77
99,32
8
0,50
1,0
0,90
1,0
0,95
0,001
2,83
98,86
9
0,50
1,0
0,98
1,0
0,95
0,001
3,20
94,77
10
0,50
1,0
0,85
1,0
0,95
0,0001
2,36
99,54
11
0,50
1,0
0,90
1,0
0,95
0,0001
2,33
99,09
12
0,50
1,0
0,98
1,0
0,95
0,0001
2,68
95,00
Fonte: Elaboração do próprio autor.
A melhor especificação dos parâmetros da rede para o módulo de diagnóstico de curtoscircuitos corresponde à descrita na topologia 10, a qual obteve uma taxa de acerto de 99,54%.
A descrição completa da eficiência desta topologia é apresentada no Quadro 11, a qual
114
fornece o número de padrões de treinamento e teste, e o índice de acerto obtido no diagnóstico
de curtos-circuitos.
Quadro 11 – Descrição detalhada da eficiência do sistema de classificação de curtos-circuitos
para a melhor topologia
Diagnóstico
Padrões de
Padrões
Treinamento
de Teste
Baixa
63
33
100,00
Alta
34
14
100,00
Baixa
70
26
100,00
Alta
29
19
100,00
Baixa
67
29
100,00
Alta
33
15
100,00
Baixa
134
58
100,00
Alta
67
29
100,00
Baixa
130
62
100,00
Alta
71
25
100,00
Baixa
134
58
100,00
Alta
65
31
100,00
Baixa
69
27
96,30
Alta
34
14
92,86
1000
440
99,54
Resistência de Falta
a
b
c
ab
bc
ca
abc
Total
Acerto (%)
Fonte: Elaboração do próprio autor.
9.5.3
Módulo de Avaliação da Presença da Terra
A distinção de curtos-circuitos bifásicos sem conexão à terra, i.e., ab, bc e ca, de curtos-
circuitos bifásicos com conexão à terra, i.e., ab-g, bc-g e ca-g, é realizada através da análise
do parâmetro Z . Este parâmetro somente é calculado quando o módulo de classificação de
curtos-circuitos apresenta em sua saída duas fases ativas, obtendo melhora na eficiência e no
tempo total de diagnóstico, i.e., o cálculo do parâmetro Z não é necessário para curtoscircuitos monofásicos e trifásicos, reduzindo a dimensão do vetor de entrada da rede neural
em um componente. O valor limite especificado para avaliar a conexão com a terra foi
115
Z máx 10 . Assim, obteve-se 100% de distinção de curtos-circuitos bifásicos sem conexão à
terra de curtos-circuitos bifásicos com conexão à terra.
9.6
Comentários
Nesta seção foram apresentados os principais resultados obtidos pela metodologia
proposta, a qual foi simulada em um PC Intel Core i7-2600, 3,4 GHz com 8-Gb de memória
RAM.
A aplicação da transformada wavelet mostrou ser uma ferramenta bastante eficiente
quando empregada na extração das características, uma vez que foi possível distinguir a
operação normal da operação com distúrbio no processo de detecção.
Além disso, os índices utilizados como entradas das redes neurais, gerados a partir da
AMR, foram capazes de representar de modo eficiente o comportamento dos distúrbios
analisados nesta pesquisa.
Por fim, os resultados obtidos pelos módulos de classificação, os quais empregaram
lógica fuzzy ou redes neurais, forneceram resultados satisfatórios, próximos ou iguais a 100%
de acerto, comprovando a eficiência da metodologia proposta no diagnóstico de distúrbios em
alimentadores de distribuição de energia elétrica.
117
10
CONCLUSÕES
A automação de subestações de distribuição de energia elétrica é um processo complexo
em consequência da constante evolução e expansão do sistema de distribuição de energia
elétrica. Assim, para que este processo seja alcançado pode-se estar empregando ferramentas
baseadas na inteligência artificial, de modo que as metodologias empregadas sejam capazes
de se adaptarem às mudanças, estruturais e filosóficas, advindas da constante evolução do
setor.
Esta pesquisa teve como objetivo a formulação do controle preventivo, capaz de realizar
o diagnóstico de diversos distúrbios em sistemas de distribuição de energia elétrica. Com as
ferramentas desenvolvidas nesta pesquisa, a tomada de decisão, por parte dos operadores,
torna-se um processo simples. Assim, fica somente como responsabilidade do operador
definir a medida preventiva a ser adotada para restabelecer a operação normal do sistema de
distribuição de energia elétrica.
Normalmente, na literatura especializada, são encontrados trabalhos que realizam o
diagnóstico de somente um tipo de distúrbio, i.e., ou de distúrbios de tensão, ou de curtoscircuitos, ou de faltas de alta impedância, nunca de todos estes ao mesmo tempo. Neste
sentido, baseando-se no uso combinado de modernas técnicas de processamento de sinais e
sistemas inteligentes, o sistema desenvolvido é capaz de realizar o diagnóstico de diferentes
distúrbios. Esta ferramenta de suporte à tomada de decisão visa acelerar o processo de
restauração do sistema, fornecendo maior segurança e lucratividade para as concessionárias.
A metodologia foi desenvolvida baseando-se no compromisso entre as necessidades das
empresas de energia elétrica e suas condições técnicas e econômicas.
Inicialmente, o sistema proposto realiza a detecção de distúrbios através de micro e
macroanálises dos coeficientes de detalhe, extraídos utilizando a AMR, das oscilografias de
tensão e de corrente. Este módulo obteve 100% de acerto no diagnóstico de anormalidade,
sendo então capaz de distinguir a operação normal da operação anormal do sistema.
Detectado qualquer anormalidade no alimentador, identifica-se o instante de ocorrência
da falha e avalia-se, através do uso do conceito entropia e de um sistema fuzzy, se esta
118
anormalidade é uma falta de alta impedância. Empregando um número de regras reduzido,
este módulo foi capaz de diferenciar todas as faltas de alta impedância dos demais distúrbios,
alcançando assim 100% de acerto.
Caso o disbúrbio detectado não se caracterize por ser uma falta de alta impedância,
utilizando os conceito energia e uma rede neural Fuzzy ARTMAP, verifica-se se esta
anormalidade é um distúrbio de tensão ou um curto-circuito. Nesta etapa, obteve-se 100% de
acerto nos diagnósticos.
O diagnóstico de distúrbios de tensão é ativado se o distúrbio for classificado como um
distúrbio de tensão. Assim, utilizando somente as oscilografias de tensão, extraem-se
características que posteriormente são agregadas via conceito entropia. Por conseguinte, uma
segunda rede neural Fuzzy ARTMAP classifica o tipo de distúrbio de tensão. O índice de
acerto obtido por este sistema, 96,77%, foi menor, quando comparado com o dos outros
módulos, devido alguns distúrbios apresentarem comportamento semelhante para as
características selecionadas. No entanto, a taxa de acerto é satisfatória quando comparado
com alguns resultados encontrados na literatura.
Ademais, o sistema de diagnóstico de curtos-circuitos extrai índices das oscilografias de
corrente, utilizados como entrada de uma terceira rede neural Fuzzy ARTMAP. Esta rede
fornece como diagnóstico as fases envolvidas no curto-circuito. Caso duas fases sejam
ativadas, determina-se a presença da terra. Este sistema apresentou uma taxa de acerto de
99,54%, sendo capaz de diferenciar curtos-circuitos bifásicos sem conexão com a terra de
curtos-circuitos bifásicos com conexão com a terra.
Todos os sistemas desenvolvidos, i.e., detecção e decisão, diagnóstico de distúrbios de
tensão e diagnóstico de curtos-circuitos, tiveram como principal característica a robustez, já
que mesmo com a variação do carregamento, localização dos distúrbios, fase na qual ocorria o
distúrbio, entre outros fatores, o índice de acerto destes foram elevados, comprovando assim a
eficiência da metodologia.
A escolha pelo uso de redes neurais da família ART, Fuzzy ARTMAP, é devido esta
família de rede apresentar um reduzido tempo de treinamento. Deve-se ressaltar que cada
módulo que emprega uma rede neural Fuzzy ARTMAP necessitou de apenas uma época, i.e.,
um ciclo de treino sobre todo o conjunto de padrões de entrada, para alcançar tais resultados.
Portanto, esta arquitetura de rede possui alto desempenho computacional quando comparado
119
com técnicas existentes na literatura especializada, e.g., o algoritmo backpropagation requer
mais épocas para obter resultados similares.
Além disso, por possuir características de estabilidade e plasticidade, esta rede
possibilita a inclusão do treinamento continuado. O módulo de treinamento continuado
representa uma vantagem em relação às tradicionais técnicas presentes na literatura. Nestas
redes neurais, a inclusão de um novo padrão de treinamento requer a reinicialização do
processo, destruindo o conhecimento previamente adquirido. Este reforço, na rede Fuzzy
ARTMAP, pode ser realizado continuamente sem destruir o conhecimento previamente
adquirido. Redes neurais com esta concepção melhoram continuamente a qualidade dos
resultados e permitem a adaptação automática do sistema de diagnóstico.
Por fim, o uso combinado de técnicas de processamento de sinais e sistemas inteligentes
possibilitou uma alta capacidade de generalização, adaptabilidade, eficiência e rapidez de
resposta, características essenciais para o auxilio à tomada de decisão.
10.1
Sugestões Para Trabalhos Futuros
A metodologia desenvolvida, mesmo apresentando excelentes resultados (índices de
acerto superiores a 95%), pode ser melhorada e complementada. Assim, ficam como
sugestões os seguintes trabalhos:
Aplicação da metodologia em alimentadores com cargas não-lineares e geração distribuída
no alimentador
Desenvolvimento de um sistema de localização de distúrbios, i.e., faltas de alta
impedância, curtos-circuitos e distúrbios de tensão;
Desenvolvimento de um sistema antecipador de distúrbios, sendo capaz de “prever” a
ocorrência de anormalidades;
Inclusão do módulo de treinamento continuado nos sistemas que utilizam a rede neural
Fuzzy ARTMAP como ferramenta de classificação e, consequentemente, a inclusão de
novos tipos de distúrbios.
121
REFERÊNCIAS
ABDEL-GALIL, T. K. et al. Power quality disturbance classification using inductive
inference approach. IEEE Transactions on Power Delivery, Piscataway, v. 19, n. 4, p.
1812–1818, 2004.
ALAG, S. et al. A methodology for intelligent sensor measurement, validation, fusion, and
fault detection for equipment monitoring and diagnosis. Artificial Intelligence for
Engineering Design, Analysis and Manufacturing, Cambridge, v.15, n. 4, p. 307–320,
2001.
AMIS, G. P.; CARPENTER, G.A. Self-supervised ARTMAP. Neural Networks, Oxford, v.
23, n. 2, p. 265–282, 2010.
ANDERSON, P. M. Analysis of faulted power systems. NewYork: Wiley-IEEE Press,
1995.
ALTERNATIVE TRANSIENTS PROGRAM – ATP. RuleBook. Oslo: EMTP-ATP Users
Group/SINTEF Energy Research, 2007.
BAQUI, I. et al. High impedance fault detection methodology using wavelet transform and
artificial neural networks. Electric Power Systems Research, Lausanne, v. 81, n. 7, p. 1325–
1333, 2011.
BARNETT, J. A. Computational methods for a mathematical theory of evidence. In:
YAGER, R. R.; LIU, L. (Eds.). Classic works of the Dempster-Shafer Theory of belief
functions. Berlin: Springer, 2008. p. 197–216.
BENDER, E. A. Mathematical methods in artificial intelligence. Pistacaway: IEEE Press,
1996.
BUCHHOLZ, V. L. et al. High impedance fault detection device tester. IEEE Transactions
on Power Delivery, Pistacaway, v. 11, n. 1, p. 71-77, 1996.
CARPENTER, G. A.; GROSSBERG, S. A massively parallel architecture for a selforganizing neural pattern recognition machine. Computer Vision, Graphics, and Image
Processing, Maryland, Heights, v. 37, n. 1, p. 54–115, 1987a.
CARPENTER, G. A.; GROSSBERG, S. ART2: stable self-organization of pattern
recognition codes for analog input patterns. Applied Optics, Washington, DC, v. 26, n. 23, p.
4919–4930, 1987b.
CARPENTER, G. A.; GROSSBERG, S. A self-organizing neural network for supervised
learning, recognition and prediction. IEEE Communications Magazine, Piscataway, v. 30,
n. 9, p. 38–49, 1992.
122
CARPENTER, G. A. et al. ARTMAP: supervised real-time learning and classification of nonstationary data by a self-organizing neural network. Neural Network, Oxford, v. 4, o. 5, p.
565–588, 1991a.
CARPENTER, G. A. et al. Fuzzy ART: fast stable learning and categorization of analog
patterns by an adaptive resonance system. Neural Network, Oxford, v. 4, n. 1, p. 759–771,
1991b.
CARPENTER, G. A. et al. Fuzzy ARTMAP: a neural network architecture for incremental
supervised learning of analog multidimensional maps. IEEE Transactions on Neural
Networks, vol. 3, no. 5, pp. 698–713, 1992.
CHEN, G.; PHAM, T. T. Introduction to fuzzy systems. Boca Raton: Chapman & Hall/CRC
Press, 2006.
CHEN, W.-H. et al. On-line fault diagnosis of distribution substations using hybrid causeeffect network and fuzzy rule-based method. IEEE Transactions on Power Delivery,
Piscataway, v. 15, n. 2, p. 710–717, 2000.
COX, E. The fuzzy systems handbook: a practioner’s guide to building, using, and
maintaining fuzzy systems. Boston: Academic Press, 1994.
DAS, B. Fuzzy logic-based fault-type identification in unbalanced radial power distribution
system. IEEE Transactions on Power Delivery, Piscataway, v. 21, n. 1, p. 278–285, 2006.
DAUBECHIES, I. Ten lectures on wavelets. Philadelphia: Society for Industrial and Applied
Mathematics, 1992.
DECANINI, J. G. M. S. Detecção e classificação de faltas de curto-circuito em sistemas de
distribuição de energia elétrica usando lógica nebulosa. 110 f. Dissertação (Mestrado em
Engenharia Elétrica) – Faculdade de Engenharia, Universidade Estadual Paulista, Ilha
Solteira, 2008.
DECANINI, J. G. M. S. Detecção, classificação e localização de faltas de curto-circuito
em sistemas de distribuição de energia elétrica usando sistemas inteligentes. Projeto
(Doutorado em Engenharia Elétrica), Faculdade de Engenharia, Universidade Estadual
Paulista, Ilha Solteira, 2009. Processo FAPESP No. 2009/10029-0.
DECANINI, J. G. M. S. et al. Detection and classification of voltage disturbances using a
fuzzy-ARTMAP-wavelet network. Electric Power Systems Research, Lausanne, v. 81, n.
12, p. 2057–2065, 2011a.
DECANINI, J. G. M. S. et al. Detecção e classificação de faltas de curto-circuito em sistemas
de distribuição de energia elétrica usando sistemas inteligentes. In: CONGRESSO
BRASILEIRO DE INTELIGÊNCIA COMPUTACIONAL, 10., 2011, Fortaleza. Anais... Rio
de Janeiro: SBIC, 2011b. p. 1–4.
DJUKANOVIC, M. et al. A neural-net based short term load forecasting using moving
window procedure. Electrical Power and Energy Systems, Oxford, v. 17, n. 6, p. 391–397,
1995.
123
DUBÉ, L. How to use MODELS-based user-defined network components in ATP. In:
EUROPEAN EMTP USERS GROUP MEETING, 1996, Budapest. Proceedings… Siegen:
EEUG, 1996. p. 10–12, 1996.
EL-ZONKOLY, A. M. Fault diagnosis in distribution networks with distributed generation.
Electric Power System Research, Lausanne, v. 81, n. 7, p. 1482–1490, 2011.
EMANUEL, A. E.; GULACHENSKI, E. M. High impedance fault arcing on sandy soil in
15kV distribution feeders: contributions to the evaluation of the low frequency spectrum.
IEEE Transactions on Power Delivery, Piscataway, v. 5, n. 2, p. 676–686, 1990.
ERISTI, H. et al. Wavelet-based feature extraction and selection for classification of power
system disturbances using support vector machines. Electric Power System Research,
Lausanne, v. 80, n. 7, p. 743–752, 2010.
ETEMADI, A. H.; SANAYE-PASAND, M. High-impedance fault detection using multiresolution signal decomposition and adaptive neural fuzzy inference system. IET
Generation, Transmission and Distribution, Stevenage, v. 2, n. 1, p. 110–118, 2008.
FAN, J.; BORLASE, S. The evolution of distribution. IEEE Power and Energy Magazine,
Piscataway, v. 7, n. 2, p. 63–68, 2009.
GEORGIOPOULOS, M. et al. Order of search in fuzzy ART and fuzzy ARTMAP: effect of
the choice parameter. Neural Networks, Oxford, v. 9, n. 9, p. 1541–1559, 1996.
GOPAL, S. et al. Fuzzy neural network classification of global land cover from a 1-degree
AVHRR data set. Remote Sensing of Environment, New York, v. 67, n. 2, p. 230–243,
1999.
GRANGER, E. et al. A VLSI architecture for fast clustering with fuzzy ART neural
networks. International Journal of Microelectronics System Integration, New York, v. 5,
n. 1, p. 3–18, 1997.
GROSSBERG, S. Adaptive pattern classification and universal recoding, I: parallel
development and coding of neural feature detectors. Biological Cybernetics, Heidelberg, v.
23, n. 3, p. 121–134, 1976a.
GROSSBERG, S. Adaptive pattern classification and universal recoding, II: feedback,
expectation, olfaction, and illusions. Biological Cybernetics, Heidelberg, v. 23, n. 4, p. 187–
202, 1976b.
HE, J. et al. ART-C: a neural architecture for self-organization under constraints. In:
INTERNATIONAL JOINT CONFERENCE ON NEURAL NETWORKS, 2002, Honolulu.
Proceedings… Piscataway: IEEE, 2002. p. 2550–2555.
INSTITUTE OF ELECTRICAL AND ELECTRONICS ENGINEERS – IEEE. Guide for
identifying and improving voltage quality in power systems - IEEE Std P1250.
Piscataway: IEEE, 2011. 68 p.
124
JANG, J.-S. R. ANFIS: adaptive-network-based fuzzy inference system. IEEE Transactions
on Systems, Man, and Cybernetics, Piscataway, v. 23, n. 3, p. 665–685, 1993.
KANDEL, A. Fuzzy control systems. Boca Raton: CRC Press, 1993.
KARTALOPOULOS, S. V. Understanding neural networks and fuzzy logic: basic
concepts and applications. Piscataway: IEEE Press, 1996.
KASABOV, N. K. Foundations of neural networks, fuzzy systems, and knowledge
engineering. Cambridge: MIT, 1998.
KEYVAN, S. et al. Nuclear fuel pellet inspection using artificial neural networks. Journal of
Nuclear Materials, Amsterdam, v. 264, n. 1–2, p. 141–154, 1999.
KEZUNOVIC, M. Smart fault location for smart grids. IEEE Transactions on Smart Grid,
Piscataway, v. 2, n. 1, p. 11–22, 2011.
KEZUNOVIC, M.; VASILIC, S. Fuzzy ART neural network algorithm for classifying the
power system faults. IEEE Transactions on Power Delivery, Piscataway, v. 20, n. 2, p.
1306–1314, 2005.
KEZUNOVIC, M.; ABUR, A. Merging the temporal and spatial aspects of data and
information for improved power system monitoring applications. Proceedings of the IEEE,
Piscataway, v. 93, n. 11, p. 1909–1119, 2005.
LABORATÓRIO DE PLANEJAMENTO DE SISTEMAS DE ENERGIA ELÉTRICA –
LaPSEE. Practical 134 bus feeder data. Ilha Solteira, 2011. Disponível em:
<http://www.dee.feis.unesp.br/lapsee/arquivos/down_sistemastestes/135_bus_feeder.pdf>.
Acesso em: 16 mar. 2012.
LIM, C. P.; HARRISON, R. F. Modified fuzzy ARTMAP approaches bayes optimal
classification rates: an empirical demonstration. Neural Networks, Oxford, v. 10, n. 4, p.
755–774, 1997.
LOPES, M. L. M. Desenvolvimento de redes neurais para previsão de cargas elétricas de
sistema de energia elétrica. 149 f. Tese (Doutorado em Engenharia Elétrica) – Faculdade de
Engenharia, Universidade Estadual Paulista, Ilha Solteira, 2005.
LOPES, M. L. M. et al. Electric load forecasting using a fuzzy ART&ARTMAP neural
network. Applied Soft Computing, Amsterdam, v. 5, n. 2, p. 235–244, 2005.
MAHANTY, R. N.; DUTTA GUPTA, P. B. A fuzzy logic based fault classification approach
using current samples only. Electric Power Systems Research, Lausanne, v. 77, n. 6–7, p.
501–507, 2007.
MALANGE, F. C. V. Rede neuro-fuzzy-wavelet para detecção e classificação de
anomalias de tensão em sistemas elétricos de potência. 128 f. Tese (Doutorado em
Engenharia Elétrica) – Faculdade de Engenharia, Universidade Estadual Paulista, Ilha
Solteira, 2010.
125
MALLAT, S. A wavelet tour of signal processing: the sparse way. 3. ed. Burlington:
Academic Press, 2009.
MARCHIORI, S. C. et al. Neural network based on adaptive resonance theory with
continuous training for multiconfiguration transient stability analysis of electric power
systems. Applied Soft Computing, Amsterdam, v. 11, n. 1, p. 706–715, 2011.
MASOUM, M. A. S. et al. Detection and classification of power quality disturbances using
discrete wavelet transform and wavelet networks. IET Science Measurement and
Technology, Atevenage, v. 4, n. 4, p. 193–205, 2010.
McDONALD, J. D. Eletric power substations engineering. Boca Raton: CRC Press, 2003.
MEHER, S. K.; PRADHAN, A. K. Fuzzy classifiers for power quality events analysis.
Electric Power Systems Research, Lausanne, v. 80, n. 1, p. 71–76, 2010.
MENDEL, J. M. Fuzzy logic systems for engineering: a tutorial. Proceedings of the IEEE,
Piscataway, v. 83, n. 3, p. 345-377, 1995.
MOHAMED, E. A.; RAO, N. D. Artificial neural network based fault diagnostic system for
electric power distribution feeders. Electric Power System Research, Lausanne, v. 35, n. 1,
p. 1–10, 1995.
NORTHCOTE-GREEN, J.; WILSON, R. Control and automation of electrical power
distribution systems. Boca Raton: CRC/Taylor & Francis, 2007.
OLESKOVICZ, M. et al. Power quality applying a hybrid methodology with wavelet
transform and neural networks. International Journal of Electrical Power & Energy
Systems, Oxford, v. 31, n. 5, p. 206–212, 2009.
OPPENHEIM, A. V.; SCHAFER, R. W. Digital signal processing. Englewood Cliffs:
Prentice Hall, 1975.
PANIGRAHI, B. K.; PANDI, V. R. Optimal feature selection for classification of power
quality disturbances using wavelet packet-based fuzzy k-nearest neighbour algorithm. IET
Generation, Transmission and Distribution, Stevenage, v. 3, n. 3, p. 296–306, 2009.
REAZ, M. B. I. et al. Expert system for power quality disturbance classifier. IEEE
Transaction on Power Delivery, Piscataway, v. 22, n. 3, p. 1979–1988, 2007.
ROEPER, R. Correntes de curto-circuito em redes trifásicas. São Paulo: Nobel, 1991.
SALIM, R. H. et al. Hybrid fault diagnosis scheme implementation for power distribution
systems automation. IEEE Transactions on Power Delivery, Piscataway, v. 23, n. 4, p.
1846–1856, 2008.
SAMANTARAY, S. R. et al. Adaptive Kalman filter and neural network based high
impedance fault detection in power distribution networks. International Journal of
Electrical Power & Energy Systems, Oxford, v. 31, n. 4, p. 167–172, 2009.
126
SAMANTARAY, S. R. et al. High impedance fault detection in power distribution networks
using time-frequency transform and probabilistic neural network. IET Generation,
Transmission and Distribution, Stevenage, v. 2, n. 2, p. 261–270, 2008.
SANTOSO, S. et al. Power quality waveform recognition using wavelet-based neural
classifier - part 1: theoretical foundation. IEEE Transactions on Power Delivery,
Piscataway, v. 15, n. 1, p. 222–228, 2000.
SARLAK, M.; SHAHRTASH, S. M. High impedance fault detection using combination of
multi-layer perceptron neural networks based on multi-resolution morphological gradient
features of current waveform. IET Generation, Transmission and Distribution, Stevenage,
v. 5, n. 5, p. 588–595, 2011.
SIMPSON, P. K. Artificial neural systems: foundations, paradigms, applications, and
implementations. New York: Pergamon Press, 1989.
TONELLI-NETO, M. S. Formulação do controle preventivo em sistemas de distribuição
de energia elétrica baseada na lógica fuzzy e redes neurais. Projeto (Mestrado em
Engenharia Elétrica) – Faculdade de Engenharia, Universidade Estadual Paulista, Ilha
Solteira, 2009. Processo FAPESP No. 2009/12284-8.
TONELLI-NETO, M. S. Desenvolvimento de um sistema inteligente para o controle
preventivo (proatividade) de sistemas de distribuição de energia elétrica. Projeto
(Doutorado em Engenharia Elétrica) – Faculdade de Engenharia, Universidade Estadual
Paulista, Ilha Solteira, 2011. Processo FAPESP No. 2011/20903-0.
TONELLI-NETO, M. S. et al. Detecção de faltas de alta impedância em alimentadores de
distribuição de energia elétrica usando transformada wavelet e uma rede neural ARTMAP
fuzzy. In: CONFERÊNCIA BRASILEIRA DE DINÂMICA, CONTROLE E APLICAÇÕES,
10., 2011, Águas de Lindóia. Resumos... Ilha Solteira: Unesp/Feis, 2011a. p. 1-4.
TONELLI-NETO, M. S. et al. Detecção e classificação de faltas de curto-circuito em sistemas
de distribuição de energia elétrica usando uma rede neural ARTMAP fuzzy. In: SIMPÓSIO
BRASILEIRO DE AUTOMAÇÃO INTELIGENTE, 10., 2011, São João Del Rei. Anais...
São João Del Rei: [s.n.], 2011b. p. 1-6.
UYAR, M. et al. An effective wavelet-based feature extraction method classification of power
quality disturbance signals. Electric Power System Research, Lausanne, v. 78, n. 10, p.
1747–1755, 2008.
VERZI, S. I. et al. Universal approximations with fuzzy ART and fuzzy ARTMAP. In:
INTERNATIONAL JOINT CONFERENCE ON NEURAL NETWORKS, 2003, Portland.
Proceedings… Piscataway: IEEE, 2003. v. 3, p. 1987–1992.
WEENINK, D. Category ART: a variation on adaptive resonance theory neural networks.
Proceedings of the Institute of Phonetic Sciences, Amsterdam, v. 21, p. 117–129, 1997.
ZADEH, L. A. Fuzzy sets. Information and Control, Maryland Heights, v. 8, n. 3, p. 338–
353, 1965.
127
ZHANG, G. et al. Entropy feature extraction approach for radar emitter signals. In:
INTERNATIONAL CONFERENCE ON INTELLIGENT MECHATRONICS AND
AUTOMATION, 2004, Chengdu. Proceedings… Piscataway: IEEE, 2004. p. 621–625.
129
ANEXO A - DADOS DO SISTEMA TESTE
O alimentador modelado no software ATP para simulações dos distúrbios é apresentado
na Figura 35. Este é um alimentador de distribuição real, com as seguintes características:
aéreo, trifásico, ramificado, composto por 134 barras, 13,8 kV, 7,065 MVA, mutuamente
acoplado e com fator de potência das cargas igual a 0,92 (LaPSEE, 2011).
Figura 35 – Alimentador de distribuição utilizados para simulação dos distúrbios.
Fonte: Adaptado de LaPSEE (2011).
A Tabela 9 fornece a barra inicial e final de cada trecho, o comprimento destes trechos,
a bitola do condutor e a carga conectada à barra final de cada trecho do alimentador.
Tabela 9 – Dados do alimentador de distribuição de energia elétrica (continua)
Barra
Linha
Carga Conectada à Barra Final
Inicial
Final
Comprimento (m)
Bitola
Potência Aparente (kVA)
1
2
900
#4/0
0,00
2
3
50
#2
45,00
2
4
100
#4/0
0,00
130
Tabela 9 – Dados do alimentador de distribuição de energia elétrica (continuação)
Barra
Linha
Carga Conectada à Barra Final
Inicial
Final
Comprimento (m)
Bitola
Potência Aparente (kVA)
4
5
40
#4/0
75,00
5
6
200
#4/0
75,00
6
7
200
#4/0
112,50
7
8
200
#4/0
75,00
8
9
10
#4/0
75,00
9
10
50
#4/0
0,00
10
11
100
#4
0,00
11
12
60
#4
8,60
12
13
30
#4
75,00
13
14
160
#4
75,00
11
15
30
#4
112,50
15
16
10
#4
45,00
16
17
20
#4
112,50
17
18
40
#4
0,00
18
19
40
#2
75,00
19
20
50
#2
112,50
18
21
150
#2
112,50
10
22
30
#4/0
112,50
22
23
70
#4/0
0,00
23
24
50
#4
3,00
24
25
20
#4
45,00
25
26
30
#4
0,00
26
27
60
#2
112,50
27
28
40
#2
0,00
28
29
20
#2
75,00
29
30
120
#2
112,50
28
31
20
#2
112,50
26
32
20
#4
112,50
32
33
5
#4
112,50
33
34
25
#4
112,50
131
Tabela 9 – Dados do alimentador de distribuição de energia elétrica (continuação)
Barra
Linha
Carga Conectada à Barra Final
Inicial
Final
Comprimento (m)
Bitola
Potência Aparente (kVA)
23
35
10
#4/0
0,00
35
36
70
#4/0
12,40
36
37
10
#4/0
112,50
37
38
10
#4/0
0,00
38
39
70
#4/0
3,00
38
40
100
#4/0
0,00
40
41
60
#4
75,00
40
42
50
#4
75,00
42
43
10
#4
75,00
40
44
30
#4/0
112,50
44
45
40
#4/0
45
38
46
60
#4/0
1,00
46
47
20
#4/0
112,50
47
48
120
#4/0
0,00
48
49
50
#4/0
112,50
49
50
20
#4/0
75,00
50
51
170
#4/0
112,50
48
52
100
#4/0
0,00
52
53
60
#4
1,20
53
54
30
#4
112,50
54
55
130
#4
75,00
52
56
20
#4
75,00
56
57
80
#4
0,00
57
58
50
#2
10,00
57
59
60
#2
112,50
59
60
20
#2
3,80
48
61
40
#4/0
3,00
61
62
10
#4/0
5,50
62
63
50
#4/0
0,00
63
64
30
#1/0
75,00
132
Tabela 9 – Dados do alimentador de distribuição de energia elétrica (continuação)
Barra
Linha
Carga Conectada à Barra Final
Inicial
Final
Comprimento (m)
Bitola
Potência Aparente (kVA)
64
65
20
#1/0
75,00
65
66
30
#1/0
3,50
66
67
20
#1/0
0,00
67
68
30
#4
112,50
67
69
20
#4
7,00
69
70
20
#4
112,50
67
71
50
#1/0
75,00
71
72
40
#1/0
8,50
72
73
40
#1/0
1,90
73
74
20
#1/0
112,50
74
75
110
#1/0
112,50
63
76
20
#4/0
112,50
76
77
30
#4/0
5,90
77
78
50
#4/0
0,00
78
79
70
#4/0
75,00
79
80
70
#4/0
112,50
80
81
30
#4/0
112,50
81
82
30
#4/0
0,00
82
83
50
#4
75,00
82
84
50
#4/0
75,00
84
85
30
#4/0
112,50
85
128
20
#4/0
0,00
128
86
30
#4/0
15,50
86
87
20
#4/0
75,00
78
88
130
#2
75,00
78
89
50
#4/0
75,00
89
90
50
#4/0
0,00
90
91
180
#4/0
45,00
91
92
20
#4/0
0,00
92
93
30
#2
112,50
133
Tabela 9 – Dados do alimentador de distribuição de energia elétrica (continuação)
Barra
Linha
Carga Conectada à Barra Final
Inicial
Final
Comprimento (m)
Bitola
Potência Aparente (kVA)
92
94
70
#2
23,50
92
95
100
#4/0
0,00
95
96
40
#2
75,00
95
97
50
#2
6,00
97
98
60
#2
0,00
98
99
110
#4
23,50
98
100
40
#2
75,00
100
101
110
#2
112,50
95
102
60
#4/0
112,50
102
103
40
#4/0
0,00
103
104
30
#1/0
75,00
103
105
150
#1/0
75,00
105
106
210
#1/0
108,50
106
107
30
#1/0
0,00
107
108
100
#1/0
0,00
108
109
100
#4
108,50
109
110
30
#4
112,50
110
111
20
#4
112,50
107
112
170
#4/0
75,00
112
113
110
#4/0
0,00
113
114
110
#4
0,00
113
115
200
#4
30,00
115
116
200
#4
30,00
116
117
200
#4
30,00
117
118
200
#4
30,00
90
119
110
#2
0,00
119
120
70
#4
0,00
120
121
70
#4/0
30,00
119
122
70
#2
55,00
122
123
130
#4
0,00
134
Tabela 9 – Dados do alimentador de distribuição de energia elétrica (conclusão)
Barra
Linha
Carga Conectada à Barra Final
Inicial
Final
Comprimento (m)
Bitola
Potência Aparente (kVA)
123
124
20
#4
15,50
123
125
20
#4
15,50
125
126
40
#4
45,00
126
127
40
#4
112,50
128
129
60
#2
45,00
104
130
70
#1/0
0,00
130
131
20
#4/0
112,50
130
132
100
#1/0
0,00
132
133
40
#1/0
112,50
133
134
40
#1/0
112,50
A seguir são apresentadas as matrizes de impedâncias de cada um dos trechos.
Trecho inicial (da Barra 0 para a Barra 1): a matriz de impedância deste trecho corresponde
às impedâncias equivalentes de geração, transmissão e do transformador da subestação:
0, 2900 j1,9200 0,1960 j 0,5300 0,1960 j 0,5300
Z 0-1 0,1960 j 0,5300 0, 2900 j1,9200 0,1960 j 0,5300
0,1960 j 0,5300 0,1960 j 0,5300 0, 2900 j1,9200
(99)
Trecho com condutor de bitola #2:
Z# 2
1,0840 j 0,9980 0,0600 j 0, 4780 0,0600 j 0, 4500
0,0600 j 0, 4780 1,0840 j 0,9980 0,0600 j 0,5360
0,0600 j 0, 4500 0,0600 j 0,5360 1,0840 j 0,9980
(100)
Trecho com condutor de bitola #4:
Z# 4
1, 6440 j1, 0060 0, 0600 j 0, 4780 0, 0600 j 0, 4500
0,0600 j 0, 4780 1,6440 j1,0060 0,0600 j 0,5360
0,0600 j 0, 4500 0,0600 j 0,5360 1,6440 j1,0060
Trecho com condutor de bitola #1/0:
(101)
135
Z # 1/ 0
0,7567 j1,0067 0,0600 j 0, 4780 0, 0600 j 0, 4500
0,0600 j 0, 4780 0,7567 j1, 0067 0, 0600 j 0,5360
0,0600 j 0, 4500 0,0600 j 0,5360 0, 7567 j1, 0067
(102)
Trecho com condutor de bitola #4/0:
Z# 4 / 0
0, 4272 j 0,9609 0,0600 j 0, 4780 0,0600 j 0, 4500
0,0600 j 0, 4780 0, 4272 j 0,9609 0,0600 j 0,5360
0,0600 j 0, 4500 0,0600 j 0,5360 0, 4272 j 0,9609
(103)
137
APÊNDICE A - PUBLICAÇÕES
Neste apêndice apresentam-se os artigos publicados, os quais são resultantes da
pesquisa desenvolvida até o momento. Os artigos ilustram o desenvolvimento da metodologia
proposta na Seção 8, sendo aplicada no diagnóstico de distúrbios em sistemas de distribuição
de energia elétrica.
A.1
Periódicos Internacionais
DECANINI, J. G. M. S. et al. Detection and classification of voltage disturbances using a
fuzzy-ARTMAP-wavelet network. Electric Power Systems Research, Lausanne, v. 81, n.
12, p. 2057–2065, 2011a.
A.2
Congressos
DECANINI, J. G. M. S. et al. Detecção e classificação de faltas de curto-circuito em sistemas
de distribuição de energia elétrica usando sistemas inteligentes. In: CONGRESSO
BRASILEIRO DE INTELIGÊNCIA COMPUTACIONAL, 10., 2011, Fortaleza. Anais... Rio
de Janeiro: SBIC, 2011. p. 1-4.
TONELLI-NETO, M. S. et al. Detecção de faltas de alta impedância em alimentadores de
distribuição de energia elétrica usando transformada wavelet e uma rede neural ARTMAP
fuzzy. In: CONFERÊNCIA BRASILEIRA DE DINÂMICA, CONTROLE E APLICAÇÕES,
10., 2011, Águas de Lindóia. Resumos... Ilha Solteira: Unesp/Feis, 2011. p. 1-4.
TONELLI-NETO, M. S. et al. Detecção e classificação de faltas de curto-circuito em sistemas
de distribuição de energia elétrica usando uma rede neural ARTMAP fuzzy. In: SIMPÓSIO
BRASILEIRO DE AUTOMAÇÃO INTELIGENTE, 10., 2011, São João Del Rei. Anais...
São João Del Rei: [s.n.], 2011. p.1-6.
Baixar