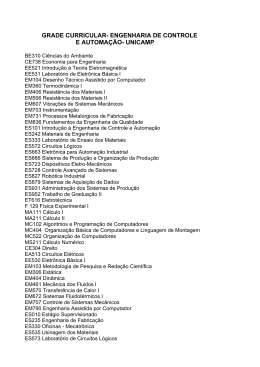
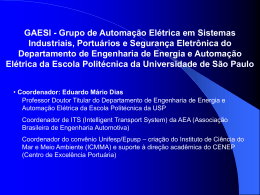
! ! ! ! ! ! ! ! ! ! !! MINISTÉRIO)DA)EDUCAÇÃO) ) INSTITUTO)FEDERAL)DE)EDUCAÇÃO,)CIÊNCIA)E) TECNOLOGIA)DO)SUDESTE)DE)MINAS)GERAIS) CONCURSO!PÚBLICO!PARA!PROVIMENTO!DE!CARGO!EFETIVO!DE!DOCENTES! ) ÁREA:!Engenharia!Mecânica!<!Hidráulica!e!Pneumática;!Robótica!e!Automação!Industrial! ! <!PROVA!OBJETIVA!<! Câmpus!Juiz!de!Fora!<!Edital!013/2014! ! TEMPO DE DURAÇÃO DA PROVA: 03 (TRÊS) HORAS INSTRUÇÕES PARA REALIZAÇÃO DA PROVA 1. ABRA ESTE CADERNO DE PROVAS SOMENTE QUANDO AUTORIZADO. 2. Confira se sua prova corresponde ao cargo para o qual você se inscreveu. 3. Verifique se este Caderno de Provas contém 20 (vinte) questões. Cada questão é constituída de cinco alternativas. Caso haja algum problema, solicite a substituição de seu Caderno de Provas. 4. Seus dados pessoais, o cargo e o Câmpus para o qual concorre encontram-se no seu Comprovante Definitivo de Inscrição e na Folha de Respostas. 5. Você só poderá deixar o local de prova após 60 minutos do início da aplicação e poderá levar o Caderno de Provas após 90 minutos do início; quando deverá entregar apenas a folha de respostas. 6. Comunique sempre aos fiscais qualquer irregularidade observada durante a realização das provas. Não sendo tomadas as devidas providências a respeito da sua reclamação, solicite a presença do(a) Coordenador(a) ou comunique-se com ele(a), na secretaria, tão logo termine a prova. 7. Os 3 últimos candidatos deverão permanecer na sala para entrega simultânea da Folha de Respostas, e deverão assinar na Ata de Sala. 8. Você será avisado quando restarem 30 minutos para o final da prova. INSTRUÇÕES PARA O PREENCHIMENTO DA FOLHA DE RESPOSTAS 1. Ao receber sua Folha de Respostas, verifique os seus dados pessoais, o nome do cargo e o Câmpus para o qual concorre. Caso esteja incorreta alguma informação, comunique ao fiscal. 2. É obrigatória a assinatura do candidato na Folha de Respostas. 3. Ao receber a Folha de Respostas, assine-a imediatamente, não deixe para depois. É de responsabilidade do candidato essa assinatura. A COPESE não se responsabilizará por Folhas de Respostas não assinadas. 4. Não amasse, não dobre, não rasgue, não rasure a Folha de Respostas, nem use corretivo. 5. A marcação de mais de uma opção para uma mesma questão implica a anulação da mesma. 6. Terminada a resolução da prova, preencha a Folha de Respostas com as suas opções, conforme instruções a seguir. • A marcação das respostas deve OBRIGATORIAMENTE ser feita com caneta esferográfica com tinta azul ou preta. • A letra correspondente à questão escolhida deve ser totalmente preenchida, evitando-se ultrapassar a linha que margeia a letra. • A COPESE não se responsabiliza por problemas na leitura que advierem da marcação inadequada da Folha de Respostas ou da utilização de material não especificado para tal. 7. Em hipótese alguma haverá substituição da Folha de Respostas. 8. Não deixe para preencher sua Folha de Respostas na última hora, pois não haverá tempo adicional para a realização dessa atividade. ! AO ASSINALAR SUAS RESPOSTAS, PREENCHA TOTALMENTE A LETRA CORRESPONDENTE A SUA RESPOSTA, NÃO FAÇA UM X OU QUALQUER OUTRA MARCA. ! ! FORMA CORRETA DE PREENCHIMENTO: NÃO PREENCHA ASSIM: x! ✓! −! *! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ATENÇÃO) • ) ) Leia!atentamente!o!Edital!correspondente!ao!seu!concurso.! • A!seguir,!chamamos!a!atenção!para!alguns!itens!presentes!no!respectivo!edital.! = = ! = Será! classificado,! nesta! etapa,! o! candidato! que! obtiver! aproveitamento! igual! ou! superior! a! 60%! (sessenta! por! cento),! respeitando! o! limite! de,! no! máximo,! 20(vinte)! vezes!o!número!de!vagas!oferecidas!na!área!objeto!do!concurso.! ! Todos! os! candidatos! empatados! na! última! classificação! da! prova! objetiva! serão! considerados! classificados! nesta! etapa! nos! termos! do! §3o! do! Art.16! do! Decreto! no! 6.944/2009.! O! resultado! da! prova! objetiva! será! divulgado! no! endereço! eletrônico:! http://www.ifsudestemg.edu.br! ! !! ! ! ! ! Concurso Público para provimento de cargo efetivo de Docentes ENGENHARIA MECÂNICA Hidráulica e Pneumática Robótica e Automação Industrial Câmpus Juiz de Fora Questão 01 CLP é: a) b) c) d) e) A consolidação das leis que regem a pneumática aplicada nas indústrias. Um circuito linear pneumático feito de válvulas direcionais e atuadores especiais. Um tipo de comunicação de linha de produção, que visa aos movimentos robóticos industriais. Um dispositivo eletroeletrônico de controle lógico programável. Um centro linha de produção, que é ao máximo evitado nas indústrias automatizadas em geral. Questão 02 Quais são as partes básicas de um CLP? a) b) c) d) e) Leis, dogmas, infrações e regimentos da ABNT. Válvulas direcionais de n/m vias com n e m podendo ser iguais e atuadores AD/AS. Elos, juntas, manipuladores e efetuadores. CPU, memória, módulos I/O, IHM e dispositivos de comunicação. Excesso de cabos, distâncias inadequadas das máquinas, falta de manutenção e falta de qualificação de funcionários. Questão 03 Sobre o CLP, é INCORRETO afirmar que: a) b) c) d) e) a saída digital a relé pode acionar cargas alimentadas por tensão contínua e alternada. a saída a TRIAC tem maior vida útil que a saída a relé. os optoacopladores servem para garantir a isolação elétrica do CLP. uma saída a transistor tipicamente aciona de forma direta cargas alimentadas por tensão alternada. as saídas analógicas convertem valores numéricos em tensão ou corrente. Questão 04 Um robô industrial é formado pela integração de vários componentes, que são: a) linhas de montagem automotiva, integração de motores–linha, transferência, e máquinas operatrizes do tipo cnc. b) cabeça lógica de programação, corpo de cabos pp e membros axoniais comandados. c) detetores, osciladores, disparadores, amplificadores e carga. d) relés, maquiadores, contatores tipo red e temporizadores. e) manipulador mecânico, sensores, efetuadores, atuadores, unidade de controle e unidade de potência. Questão 05 Marque a alternativa INCORRETA. A perda de carga em um circuito hidráulico depende: a) b) c) d) e) da velocidade e da viscosidade. da rugosidade e do diâmetro da tubulação. do número de avarias e da pintura interna da tubulação a base de epóxi. do nº de reynolds e do comprimento da tubulação. da velocidade e do comprimento da tubulação. Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais - COPESE Pag.!1!de!6! ! !! ! ! ! ! Concurso Público para provimento de cargo efetivo de Docentes ENGENHARIA MECÂNICA Hidráulica e Pneumática Robótica e Automação Industrial Câmpus Juiz de Fora Questão 06 Analise a figura abaixo e marque a resposta CORRETA. a) O0.0 é acionado assim que I0.0 for acionado. b) O0.0 é acionado no quarto SCAN. c) O0.0 nunca será acionado. d) O0.0 é acionado no terceiro SCAN. e) O0.0 é acionado no segundo SCAN. Questão 07 Marque V se a afirmativa for verdadeira, F se for falsa e, em seguida, marque a alternativa correspondente. ( ( ( ( ( ) Podemos misturar aditivos no óleo hidráulico, antes de efetuar a troca, para prolongar sua vida útil. ) Para limpeza do reservatório hidráulico, utiliza-se um jato de óleo diesel e secagem com estopa limpa. ) Um filtro hidráulico deve possuir vazão equivalente à vazão da bomba. ) A válvula de “by-pass”, instalada em alguns filtros hidráulicos, visa proteger o sistema, quando o filtro entrar em colapso. ) Os filtros hidráulicos têm a finalidade de assegurar a limpeza do óleo. Marque a alternativa CORRETA. a) b) c) d) e) V; V; V; V; V V; V; F; F; V V; F; F; V; V F; F; V; V; F F; F; F; F; F Questão 08 Dentre as propriedades físicas do ar, quais são importantes no estudo da pneumática? a) b) c) d) e) Incompressibilidade e espacidade. Porosidade e Fluidibilidade. Elasticidade e Compressibilidade. Solubilidade e Expansividade. Fidelidade e Casualidade. Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais - COPESE Pag.!2!de!6! ! !! ! ! ! ! Concurso Público para provimento de cargo efetivo de Docentes ENGENHARIA MECÂNICA Hidráulica e Pneumática Robótica e Automação Industrial Câmpus Juiz de Fora Questão 09 Com relação à rede de distribuição pneumática, analise as afirmativas e marque a alternativa correspondente: I - O reservatório de ar comprimido serve, também, para equalizar a linha de pressão. II - Os purgadores devem ser instalados em todos os locais baixos da tubulação. III - As tomadas de ar devem ser feitas pela parte superior da tubulação principal. IV - Tubulações secundárias: geralmente são mangueiras à base de polietileno e poliamida combinadas com conexões engate rápido, instaladas após unidade de conservação, junto a equipamentos ou dispositivos. Marque a alternativa CORRETA. a) b) c) d) e) Somente I e II são corretas. Somente II e III são corretas. Somente I e IV são corretas. Somente III e IV são corretas. Todas estão corretas. Questão 10 Sobre as válvulas pneumáticas, marque a afirmativa FALSA. a) Válvulas direcionais: comandam o sentido de movimento do atuador. b) Válvulas de bloqueio: impedem o fluxo de ar preferencialmente num sentido e o liberam no sentido oposto. c) Válvulas de fluxo: influenciam na vazão do ar comprimido. d) Válvulas de pressão: influenciam na pressão do ar comprimido ou são comandadas pela pressão. e) Nenhuma das respostas anteriores. Questão 11 Leia a informação abaixo e marque a alternativa CORRETA. “São elementos responsáveis pela função de aplicação de força e/ou movimento num circuito hidráulico.” a) b) c) d) e) Bombas Filtros Motores elétricos Atuadores Reservatórios Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais - COPESE Pag.!3!de!6! ! !! ! ! ! ! Concurso Público para provimento de cargo efetivo de Docentes ENGENHARIA MECÂNICA Hidráulica e Pneumática Robótica e Automação Industrial Câmpus Juiz de Fora Questão 12 Analise as proposições abaixo. I - Os sensores indutivos reagem a qualquer tipo de material, menos metais. II - Os sensores capacitivos reagem na presença metais. III - Os sensores óticos monitoram a intensidade de luz que os atinge. IV - O encoder é um transdutor que converte um movimento angular ou linear em uma série de pulsos digitais elétricos. Marque a alternativa CORRETA. a) b) c) d) e) Somente a afirmativa I está errada; As afirmativas I e II estão erradas; Todas as afirmativas estão corretas; As afirmativas II e III estão erradas; A afirmativa III está errada. Questão 13 Sobre automação e automatização é CORRETO afirmar que: a) automatização é para designar o conjunto de técnicas e meios disponíveis para a concepção, projeto e construção de um equipamento automático. b) um sistema automatizado constitui-se dos componentes responsáveis pelo processo e pelo seu automatismo. c) os componentes responsáveis pelo processo correspondem à parte de comando. d) automação é tudo aquilo que se vê em movimento dentro de uma indústria. e) automação é um ramo de trabalho específico, que só se aplica na indústria. Questão 14 Quando se emprega a automação em uma determinada indústria, NÃO podemos afirmar que: a) b) c) d) e) automação diminui os esforços físicos intensos. automação elimina uma parte dos elementos eletroeletrônicos. automação facilita a manutenção de uma determinada máquina em uma linha de produção. automação elimina totalmente a intervenção humana em um determinado processo. automação é empregada desde os mais simples sistemas aos mais complexos. Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais - COPESE Pag.!4!de!6! ! !! ! ! ! ! Concurso Público para provimento de cargo efetivo de Docentes ENGENHARIA MECÂNICA Hidráulica e Pneumática Robótica e Automação Industrial Câmpus Juiz de Fora Questão 15 Quanto aos sistemas macroscópicos industriais, numere a 1ª coluna de acordo com a 2ª coluna e, em seguida, marque a alternativa CORRETA: ( ( ( ( ( )Movimento de um cilindro pneumático )Movimento de rotação de um motor hidráulico )Movimento de uma serra manual )Movimento de uma válvula 5/2 vias )Movimento de um fluido hidráulico a) b) c) d) e) ( 1 )Sistema Contínuo ( 2 )Sistema Discreto 2; 1; 2; 2; 1 1; 1; 2; 2; 1 2; 2; 1; 1; 2 1; 1; 1; 2; 2 2; 2; 2; 1; 1 Questão 16 Sobre um manipulador paralelo em cadeia cinemática fechada, pode-se afirmar que: a) todos os elos (ou corpos rígidos) que constituem a estrutura física do robô estão dispostos paralelamente uns aos outros. b) existem múltiplas cadeias cinemáticas conectando à base do manipulador ao efetuador. c) este tipo de estrutura é também denominada “SCARA”. d) todas as juntas que constituem este manipulador ficam dispostas sobre o mesmo plano em qualquer instante de tempo. e) quando comparados com os manipuladores com cadeia cinemática aberta, os manipuladores paralelos destacam-se por possuir baixas velocidades de operação e “workspace” maior. Questão 17 Sobre a pose do efetuador de um manipulador robótico, pode-se afirmar que: a) ela pode ser determinada pela orientação do frame anexado ao efetuador em relação ao frame da base do manipulador. b) ela pode ser determinada pelas coordenadas origem do frame anexado ao efetuador em relação ao frame da base do manipulador. c) ela pode ser completamente descrita pela matriz de transformação homogênea relacionando o frame do efetuador em relação ao frame da base. d) ela pode ser determinada pela representação quartenion-unitário associada ao frame do efetuador. e) ela pode ser determinada pelos ângulos roll-pitch-yaw associados ao frame do efetuador. Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais - COPESE Pag.!5!de!6! ! !! ! ! ! ! Concurso Público para provimento de cargo efetivo de Docentes ENGENHARIA MECÂNICA Hidráulica e Pneumática Robótica e Automação Industrial Câmpus Juiz de Fora Questão 18 Sobre o problema denominado cinemática direta de um robô manipulador, pode-se afirmar que: a) dada a pose do efetuador, se obtém diretamente os valores de todas as juntas da cadeia cinemática. b) tem a função de avaliar as forças e torques atuantes nos componentes do sistema. c) tem o objetivo de avaliar as velocidades instantâneas de todas as juntas que constituem o manipulador. d) fornece diretamente as velocidades instantâneas do efetuador. e) dados os valores de todas as variáveis-junta que constituem a cadeia cinemática, se obtém a pose do efetuador. Questão 19 Sobre a convenção de Denavit-Hartenberg, é CORRETO afirmar que: a) b) c) d) Permite construir as equações de “Cinemática Direta” de um robô manipulador. Relaciona as forças e torques com as respectivas acelerações lineares e angulares das juntas. É um sistema de equações que avalia o deslocamento do efetuador em função do tempo. É um processo iterativo utilizado para resolver o problema da cinemática inversa do robô manipulador e) Relaciona a velocidade do efetuador com o tempo decorrido. Questão 20 Sobre o problema de cinemática inversa de um manipulador robótico, é INCORRETO afirmar que: a) b) c) d) as equações envolvidas são, em geral, não lineares. podem existir múltiplas soluções. podem existir soluções não admissíveis devido à estrutura cinemática do manipulador. o objetivo do problema é calcular a posição do efetuador, dado o valor das variáveis-junta que constituem a cadeia cinemática. e) podem existir infinitas soluções. Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais - COPESE Pag.!6!de!6!
Download