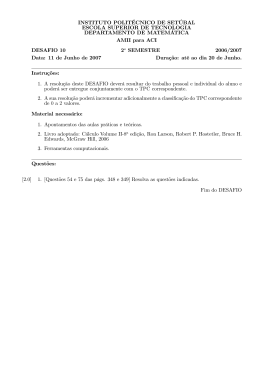
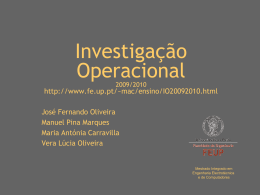
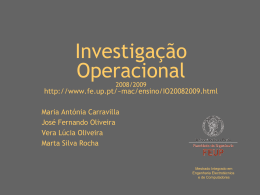
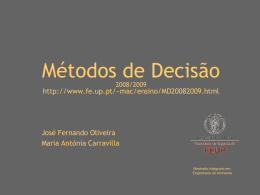
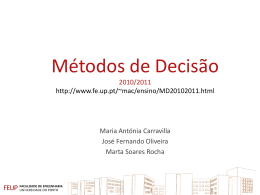
XX SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA Versão 1.0 XXX.YY 22 a 25 Novembro de 2009 Recife - PE GRUPO X GRUPO DE ESTUDO DE DESEMPENHO DE SISTEMAS ELÉTRICOS - GDS UMA METODOLOGIA PARA COMPENSAÇÃO DINÂMICA DA TENSÃO SECUNDÁRIA DE TRANSFORMADORES DE POTENCIAL CAPACITIVOS Eubis Pereira Machado (*) UFCG Célio Anésio da Silva UFCG Damásio Fernandes Júnior UFCG Methodio Varejão de Godoy CHESF Washington Luiz Araújo Neves UFCG RESUMO Os transformadores de potencial capacitivos (TPCs) não reproduzem de forma fidedigna a tensão do primário nos terminais secundários quando há ocorrência de manobras no sistema, logo, podem proporcionar operações mal sucessidas por parte dos equipamentos de proteção. Este trabalho apresenta uma estratégia de compensação que restaura dinamicamente uma réplica da tensão do primário a partir de medições do sinal secundário. A técnica proposta é avaliada a partir de simulações digitais nos domínos do tempo-frequência de um TPC de 230 kV cujas medições de resposta em frequência são utilizadas para computar os parâmetros do modelo de TPC. PALAVRAS-CHAVE: TPC, compensação, resposta em frequência. 1.0 - INTRODUÇÃO Como na maioria dos transdutores de tensão, os transformadores de potencial capacitivos (TPCs) devem reproduzir os efeitos transitórios e de regime permanente aplicados ao circuito de alta tensão o mais fielmente possível no circuito de baixa tensão. Contudo, devido à própria característica construtiva desses equipamentos, a tensão observada nos terminais de baixa tensão só é uma réplica da tensão primária na frequência industrial. Os erros de amplitude e fase apresentados pela tensão secundária dos TPCs, nas ocorrências de manobras e curtocircuitos, podem proporcionar operações mal sucedidas por parte dos dispositivos de proteção e controle (1). Na literatura existem abordagens com intuito de reproduzir a tensão primária no secundário quando a tensão do sistema de transmissão/subtransmissão de energia entra em colapso devido a um curto-circuito (2)-(3). Contudo, as metodologias passíveis de implementação em hardware não contemplam um modelo preciso de TPC para estudos no domínio tempo/frequência nem uma metodologia de obtenção dos parâmetros do modelo utilizado. Para tornar a tensão secundária uma réplica da tensão primária em um largo espectro de frequência, este trabalho propõe uma técnica de compensação dinâmica da tensão secundária de TPCs baseado na filtragem digital recursiva desse sinal. Os parâmetros de projeto do filtro digital recursivo (compensador) são determinados pela função de transferência do TPC e pela planta desejada para o TPC após o processo de compensação (TPC compensado). Para avaliar a técnica proposta no presente trabalho, apresenta-se a compensação dinâmica de um TPC de 230 kV disponibilizado pela Companhia Hidro Elétrica do São Francisco (CHESF) para Universidade Federal de Campina Grande (UFCG) (4). As medições de resposta em frequência desse TPC são utilizadas como dados de entrada para um software que computa os parâmetros lineares do TPC e externa o modelo computacional no formato do cartão do ATP (Alternative Transients Program). Neste trabalho, o ATP é empregado para simular o circuito do TPC em estudos de transitórios eletromagnéticos e a linguagem MODELS é usada como ambiente de desenvolvimento do compensador o qual é incorporado, em tempo de execução, às simulações digitais do ATP (5). (*) Departamento de Engenharia Elétrica da Universidade Federal de Campina Grande, Av. Aprígio Veloso, 882, Bodocongó, Campina Grande-PB-Brasil, CEP: 58.109-970. Tel: +55 (83) 3310-1267 - Fax: +55 (83) 3310-1015 e-mail: [email protected]. 2 2.0 - MODELO DE TPC AVALIADO NA COMPENSAÇÃO O modelo de TPC utilizado na análise de compensação é mostrado na Figura 1. Esse circuito foi adotado por contemplar os parâmetros mais relevantes na representação do TPC no domínio da frequência (4)-(6). Ele consiste da coluna capacitiva (C1 e C2), do reator de compensação (Rc, Lc e Cc), do transformador de potencial indutivo (Rp, Lp, Cp, Rm e Lm) e do circuito supressor de ferroressonância (Rf, Lf1, Lf2, −M e Cf). FIGURA 1 – Modelo de TPC utilizado para compensação da tensão secundária É importante ressaltar que o circuito da Figura 1 pode ser utilizado para frequências até aproximadamente 10 kHz, pois em frequências mais elevadas devem ser consideradas a bobina de drenagem (em série com a coluna capacitiva do TPC) e outras capacitâncias parasitas do modelo (5). 2.1 Estimação Paramétrica do TPC Para fazer uma estimativa dos parâmetros lineares do TPC de 230 kV foi utilizado o software TPCalc (7). Para tal, as medições de resposta em frequência do TPC (4), bem como um conjunto de valores fisicamente realizáveis para os parâmetros de um circuito que contém resistores, indutores e capacitores foram utilizados como dados de entrada. As Figuras 2(a) e 2(b) mostram, respectivamente, as curvas do ganho e da fase medidas e as curvas obtidas com os elementos R, L e C estimados pelo processo de ajuste paramétrico. (a) (b) FIGURA 2 – Resposta em frequência do TPC de 230 kV medida (curva em vermelho) e ajustada (curva em azul). (a) Ganho. (b) Fase Os parâmetros estimados ao final do processo de ajuste de curvas são mostrados na Tabela 1. O erro calculado com as estimativas iniciais foi 133,7% para o ganho e 32,0 graus para a fase. Após o processo de ajuste das estimativas iniciais, os erros de ganho e fase passaram a ser 6,4% e 8,4 graus, respectivamente. 3 Tabela 1 – Parâmetros estimados para o TPC de 230 kV C1 = 10,0 nF C2 = 65,4 nF Rc = 343,6 Ω Lc = 3,6 H Cc = 873,0 nF Cp = 856,9 pF Rp = 2,3 kΩ Lp = 113,0 H Rm = 3,45 MΩ Lm = 3,5 kH Lf1 = 6,2 mH Cf = 182,8 µF Lf2 = 26,4 mH Rf = 5,2 Ω M = 5,4 mH 3.0 - ESTRATÉGIA PARA COMPENSAÇÃO DINÂMICA DA TENSÃO SECUNDÁRIA DO TPC Com o objetivo de corrigir os distúrbios da tensão secundária do TPC, este trabalho propõe uma filtragem digital recursiva que restaura dinamicamente uma réplica da tensão do primário a partir de medições do sinal secundário. Para isso, os coeficientes do filtro são obtidos como funções dos elementos lineares do TPC, os quais foram estimados a partir dos dados de medições de resposta em frequência do equipamento, e de uma função de transferência que representa o modelo analítico do TPC após o processo de compensação. 3.1 Função de Transferência do Compensador O diagrama de blocos mostrado na Figura 3 é utilizado para sintetizar a relação entre as variáveis empregadas na compensação. Nessa Figura, os sinais Vi(s), Vo(s) e Vsc(s) correspondem, respectivamente, à tensão primária do TPC, tensão secundária não compensada e tensão secundária compensada. Nessa mesma figura, GCOM(s) e GTPC(s) são as funções de transferência do compensador e do TPC, respectivamente. FIGURA 3 – Diagrama de blocos de compensação do TPC Analisando esse diagrama de blocos, observa-se que para tornar a relação de transformação de tensão do TPC invariável com a frequência, basta que a função de transferência do compensador corresponda à inversa da função de transferência do TPC. Todavia, tal idealização levaria a compensadores instáveis no domínio do tempo, pois a função de transferência de sistemas físicos geralmente é estritamente própria (8). De outra forma, a compensação apenas dos pólos dominantes do TPC introduz melhorias na dinâmica desse transdutor, contudo, não proporciona uma resposta em frequência plana e necessita de compensadores por avanço/atraso de fase para ajustar o ganho e a fase nas condições de operação em regime permanente. Como solução das inconveniências citadas, propõe-se a Equação 1 como a função de transferência do compensador. GCOM ( s ) = GTPC ( s ) −1 α ( s ). (1) Nessa equação α(s) é a função que representa o modelo analítico do TPC compensado. As características necessárias e suficientes dessa função podem ser determinadas a partir da análise da Equação 2, a qual corresponde a substituição da função de transferência do circuito da Figura 1, escrita na forma de pólos (pk) e zeros (zk), na Equação 1. 8 GCOM ( s ) = ∏ (s − zk ) k =1 5 ∏ s 2 (s j =1 α ( s ). (2) − pk ) Nessa expressão, nota-se que a inversão da função de transferência do TPC acarreta um pólo duplo na origem. A fim de cancelar esses pólos indesejáveis, α(s) deve possuir pelo menos um zero duplo na origem. Essa característica de α(s) pode ser considerada sua primeira condição de contorno. Como segunda condição de contorno, observa-se que o compensador é estável somente se α(s) for uma função estritamente própria. Utilizando essas duas condições de contorno, observa-se que a Equação 3 supre as necessidades mencionadas. α ( s) = s2 . D3 s 3 + D2 s 2 + D1 s + D0 (3) Uma vez que função de transferência do TPC compensado é uma função não linear nos elementos Di, i = 0,...3, os mesmos foram determinados a partir da técnica dos mínimos quadrados não lineares, obtendo-se os valores D3 = -10 4,85×10 , D2 = 1,00, D1 = 2,44 e D0 = 2,98. Esses coeficientes permitem um ganho unitário e um deslocamento de fase mínimo em largo espectro de frequência para o TPC compensado. 4 Substituindo a Equação 3 em 2, observa-se que a versão analógica do compensador corresponde a um filtro de ordem 8. Contudo, filtros de ordem elevada quando realizados diretamente tornam-se altamente sensíveis à quantização de seus coeficientes (9), pois qualquer variação em único coeficiente pode modificar o comportamento dinâmico do filtro. A fim de contornar esse problema, a função de transferência do compensador foi desenvolvida através da conexão de quatro subfiltros com seções de segunda ordem, logo, a reposta no tempo do compensador é dada pela superposição das soluções das quatro equações diferenciais de ordem dois. Para possibilitar aplicações práticas de compensação, as equações diferencias do compensador devem ser solucionadas em tempo real. Com esse objetivo, essas equações foram escritas na forma de equações de diferença por meio da transformação bilinear, a qual permite que as características da resposta em frequência e transitória do sistema digital sejam similares ao do sistema analógico correspondente (9). O filtro digital recursivo que relaciona a tensão secundária do TPC com a tensão compensada é dado por: GCOM ( z ) = 4 k + k z −1 + k z −2 Vsc ( z ) i1 i2 i3 = k0 ∏ . − 1 −2 Vs ( z ) i = 1 1 + ki 4 z + ki 5 z (4) Onde, k0 e kij , com i = 1,...,4 e j = 1,...,4 são, respectivamente, a constante de escalamento e os coeficientes das seções de segunda ordem do filtro digital. 3.2 Implementação da Técnica de Compensação em Programas do Tipo EMTP A técnica de compensação proposta foi desenvolvida a partir da linguagem MODELS por permitir incorporar o compensador às simulações digitais em tempo de execução do ATP. Na Figura 4, apresenta-se o diagrama de blocos do esquema proposto para implantar a estratégia de compensação dinâmica de TPCs no ATP. FIGURA 4 – Implantação da técnica de compensação em programas do tipo EMTP Tendo como base de dados a resposta em frequência do TPC em estudo, o software TPCalc é utilizado para calcular os parâmetros e externar o modelo computacional do TPC no formato de cartão do ATP. Esse cartão é incorporado a um arquivo base que contém os demais cartões da simulação e instruções desenvolvidas na linguagem MODELS que controlam o fluxo de dados entre o compensador e o TPC. Uma rotina externa é utilizada de forma offline para computar os pares de pólos e zeros de cada seção do filtro digital e a ordem em que cada seção é introduzida no filtro. Por fim, a tensão secundária vo do TPC é lida pela MODELS, processada pelo filtro digital recursivo e disponibilizada na forma do sinal vsc como a tensão secundária compensada. 4.0 - AVALIAÇÃO DA TÉCNICA DE COMPENSAÇÃO Como validação do método, apresenta-se a compensação dinâmica de um TPC de 230 kV cujas medições de resposta em frequência e função de transferência foram reportadas da literatura (4). O desempenho da técnica é mensurado mediante a comparação entre a resposta do TPC sem compensação (TPC REAL) e a resposta de um divisor de tensão ideal (TPC IDEAL). 5 4.1 Análise da Compensação no Domínio da Frequência A análise no domínio da frequência consiste em uma etapa importante do processo de compensação dinâmica, uma vez que a tensão secundária fornecida pelos TPCs geralmente é utilizada pelo processo de estimação de fasores normalmente adotado pelos sistemas de proteção. Nas Figuras 5(a) e 5(b) são apresentadas, respectivamente, a resposta em frequência do ganho e da fase do TPC com e sem a técnica de compensação. Como resultado da compensação do TPC, observa-se que a relação de transformação de tensão desse transdutor tornou-se pouco dependente da frequência. Dessa forma, o sinal secundário compensado passa a conter praticamente as mesmas componentes de frequência presentes no sinal do primário. (a) (b) FIGURA 5 – Reposta em frequência da relação de transformação de tensão do TPC de 230 kV. (a) Ganho. (b) Fase 4.1 Análise da Compensação no Domínio do Tempo A análise no domínio do tempo permite verificar o comportamento em regime permanente e transitório do TPC com e sem a técnica de compensação proposta. Tal análise é de extrema importância, uma vez que, a tensão secundária do TPC pode alterar o desempenho de equipamentos como relés e localizadores de falta. Isso porque durante um curto-circuito no sistema, a tensão secundária desse transdutor geralmente apresenta transitórios que dependem, dentre outros fatores, do ângulo de incidência da falta sobre o sinal da tensão do primário (1). O sistema elétrico simplificado apresentado na Figura 6 foi elaborado para o desenvolvimento e avaliação do método ora proposto. Este circuito consiste de duas fontes de tensão com suas respectivas impedâncias e uma linha de transmissão com 300 km de extensão, cujos valores de resistência, reatância e susceptância de sequência positiva e zero são correspondentes a uma linha real do sistema elétrico da CHESF de 230 kV. Os dados do sistema são apresentados nas Tabelas 2 e 3. FIGURA 6 – Sistema elétrico para avaliação da compensação no domínio do tempo Tabela 2 – Dados de sequência da linha de transmissão Sequência zero positva R(Ω/km) 0,4309 0,0888 X(Ω/km) 1,5659 0,5249 -1 ωC(µΩ /km) 2,3301 3,1210 6 Tabela 3 – Impedâncias das fontes Fonte A B R0(Ω) 0,2856 0,8644 X0(Ω) 5,5610 12,2484 R1(Ω) 2,0205 12,8150 X1(Ω) 7,2720 31,7268 4.1.1 Correção da Reposta Transitória do TPC As Figuras 7(a) e 7(b) mostram a tensão secundária do TPC quando ocorre a energização da linha a partir do fechamento da chave A1 com o terminal receptor B1 fechado. Nota-se claramente que as componentes de alta frequência da tensão primária não são observadas no secundário do TPC sem compensação. Isso retrata que o TPC sozinho não representa de forma fidedigna os transitórios do sistema, o que acontece devido às próprias características construtivas desses equipamentos. (a) (b) FIGURA 7 – (a) Forma de onda do sinal secundário do TPC durante energização da linha de transmissão. (b) Detalhe durante o transitório da energização 4.1.2 Compensação dos Distúrbios da Tensão Secundária As Figuras 8 e 9 mostram, para diferentes ângulos de incidência, a tensão secundária de uma das três unidades do TPCA instalada no terminal emissor quando da aplicação de uma falta monofásica na barra A do sistema. (a) (b) FIGURA 8 – (a) Tensão secundária do TPC para uma falta com ângulo de incidência de 90º graus. (b) Detalhe durante os primeiros ciclos da falta 7 (a) (b) FIGURA 9 – (a) Tensão secundária do TPC para uma falta com ângulo de incidência de 0º graus. (b) Detalhe durante os primeiros ciclos da falta A partir das Figuras 8 e 9, observa-se claramente que a resposta do TPC sem compensação possui um comportamento transitório com oscilações amortecidas que perduram por mais ou menos três ciclos (base 60 Hz). Já a resposta do TPC compensado apresenta um comportamento similar ao de um divisor de tensão ideal (TPC IDEAL). 5.0 - CONCLUSÃO Neste trabalho foi apresentada uma metodologia para compensação dinâmica da tensão secundária de um modelo de TPC. Para tal, foi adotado um circuito equivalente que representa o transformador de potencial capacitivo no cálculo dos seus parâmetros. O software TPCalc foi utilizado para computar os elementos lineares do TPC a partir das medições de resposta em frequência do ganho da relação entre as tensões terminais. Os parâmetros calculados foram utilizados para modelar o TPC em um programa do tipo EMTP, bem como utilizados na determinação dos coeficientes do filtro digital recursivo. Analisando a compensação no domínio da frequência, observou-se que a relação de transformação de tensão do TPC compensado é pouco variável com a frequência. Dessa forma, uma réplica dos sinais de alta tensão com componentes entre 10 Hz e 10 kHz pôde ser devidamente computada a partir do processo de filtragem digital da tensão obtida nos terminais secundários do TPC. Os estudos no domínio do tempo foram realizados a partir do monitoramento do sinal de alta tensão mediante energização de uma linha e um curto-circuito franco com diferentes ângulos de incidência sobre o sinal de alta tensão. No primeiro caso observou-se que, diferentemente do TPC compensado, o TPC sem compensação não representa com fidelidade os transitórios ocorridos no sistema. Em relação às faltas fase-terra, verificou-se que a compensação mitigou os transitórios proporcionados pelos elementos armazenadores de energia do TPC. Logo, a estratégia de compensação apresentada pode ser utilizada para melhorar o desempenho de equipamentos como os relés de proteção e localizadores de faltas, sobretudo daqueles que necessitam de atuação rápida. 6.0 - REFERÊNCIAS BIBLIOGRÁFICAS (1) B. Kasztenny, D. Sharples, V. Asaro and M. Pozzuoli, “Distance Relays and Capacitive Voltage Transformers Balancing Speed and Transient Overreach”, Annual Conference for Protective Relay Engineers, vol. 53, Ontario Canada, Apr. 2000. (2) J. Izykowski, B. Kasztenny, E. Rosolowski, M. M. Saha, and B. Hillstrom, “Dynamic Compensation of Capacitive Voltage Transformers”, IEEE Transactions on Power Delivery, vol. 13, no. 1, pp. 116−122, Jan. 1998. (3) H. K. Zadeh, Z. Li, “A Compensation Scheme for CVT Transient Effects Using Artificial Neural Network”, Chicago, USA, 2007. (4) D. Fernandes Jr., Modelo de Transformadores de Potencial Capacitivos para Estudos de Transitórios Eletromagnéticos, Tese de Doutorado, UFCG, dez. 2003. (5) L. Dube, Models in ATP: Language Manual, Feb. 1996. 8 (6) Lj. Kojovic, M. Kezunovic, V. Skendzic, C. W. Fromen and D. R. Sevcik, “A New Method for the CCVT Performance Analysis Using Field Measurements, Signal Processing and EMTP Modeling”, IEEE Transactions on Power Delivery, vol. 9, pp. 1907-1915, Oct. 1994. (7) E. P. Machado, C. A. Silva, D. Fernandes Jr., W. L. A. Neves, G. R. S. Lira, e M. V. Godoy, “Uma Metodologia para o Cálculo de Parâmetros de Transformadores de Potencial Capacitivos”, Simpósio Brasileiro de Sistemas Elétricos − SBSE, Belo Horizonte, Abr. 2008. (8) K. Ogata, Modern Control Engineering. 3 ed.: Prentice−Hall, 1997. (9) A. V. Oppenheim and R. W. Schafer, Discrete-Time Signal Processing. Prentice−Hall, 1989. 7.0 - DADOS BIOGRÁFICOS Eubis Pereira Machado nasceu em Petrolina-PE em 1981. Recebeu os títulos de B.Sc. e M.Sc. em Engenharia Elétrica pela Universidade Federal de Campina Grande (UFCG) em 2007 e 2009, respectivamente. Atualmente é aluno de doutorado dessa mesma instituição. Possui interesses em transitórios eletromagnéticos e proteção de sistemas elétricos. Damásio Fernandes Júnior nasceu em Paulo Afonso-BA em 1973. Recebeu os títulos de B.Sc. e M.Sc. em Engenharia Elétrica pela Universidade Federal da Paraíba (UFPB) em 1997 e 1999, respectivamente, e o título de D.Sc. em Engenharia Elétrica pela Universidade Federal de Campina Grande (UFCG) em 2004. Desde 2003 é professor do Departamento de Engenharia Elétrica da UFCG. Washington L. A. Neves nasceu em Itaporanga-PB em 1957. Concluiu o curso de Engenharia Elétrica em 1979 e Mestrado em 1982 pela Universidade Federal da Paraíba (UFPB). Concluiu o Doutorado em 1994 pela Universidade de British Columbia, Vancouver, Canadá. Desde 2002 é professor do Departamento de Engenharia Elétrica da Universidade Federal de Campina Grande (UFCG). Célio Anésio da Silva nasceu em Brasília-DF em 1983. Recebeu o título de B.Sc. em Engenharia Elétrica pela Universidade Federal de Campina Grande (UFCG) em 2008. Atualmente é aluno do curso de Pós-Graduação em Engenharia Elétrica dessa mesma instituição. Methodio V. Godoy nasceu em Recife-PE em 1959. Recebeu os títulos de B.Sc. em Engenharia Elétrica pela Universidade Federal de Pernambuco (UFPE) em 1982, M.Sc. em Engenharia Elétrica pela UMIST (Manchester – Inglaterra) em 1995, e o título de D.Sc. em Engenharia de Produção pela UFPE em 2006. Atualmente, é Engenheiro da Companhia Hidro Elétrica do São Francisco (CHESF).
Baixar