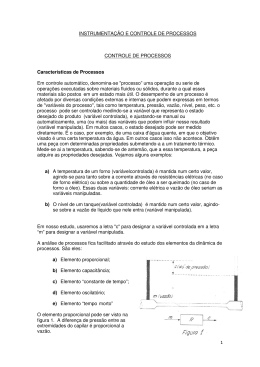
Controlo de Sistemas Mestrado Integrado em Engenharia Mecânica Área Científica de Controlo, Automação e Informática Industrial Semestre de Primavera 2010/2011 1º Teste-tipo Duração: 2 horas mais 30 minutos de tolerância. • • • • • Leia cuidadosamente todo o teste antes de o começar a resolver. Justifique detalhadamente todas as respostas. Pode consultar elementos escritos. Não é permitido o uso de computadores nem meios de telecomunicações. Identifique todas as folhas entregues. Considere um veículo para turismo aéreo composto por um balão de hélio com uma forma aproximadamente esférica, uma barquinha para transporte de passageiros e um sistema de propulsão, constituído por DOIS pares motores/hélices, como representado na figura acima. Este teste focará no desenho do controlador de altitude para este veículo, ao longo do eixo dos XX, conforme representado. [1 valor] a) Modele o sistema de transporte aéreo, com uma massa total M, sujeito às forças de Impulsão (I), peso (P), arrasto (A) (i.e. força de drag) e propulsão (U). Para simplificar o modelo a sintetizar, despreze a massa aparente e a dinâmica dos actuadores. Após testes preliminares ao sistema, concluiu-se que a massa total nominal é de 300 Kg, a força de arrasto é proporcional à velocidade vertical ( x ), através de um parâmetro β=30 N.s/m. As densidades do Hélio e do Ar são de ρH=0,2 Kg.m-3 e ρA=1 Kg.m-3, respectivamente. [1 valor] b) Com o objectivo de poupar energia deve-se fazer desaparecer o impacto do peso, através da quantidade de hélio a usar, numa operação denominada de trimming. Como dimensionaria o volume do balão de hélio para obter a condição pretendida? [2 valores] c) Escreva a equação diferencial que descreve a dinâmica do sistema resultante, após o trimming, tendo em conta que a propulsão de cada par motor/hélice tem uma ganho γ=15, em relação à entrada aplicada u. [1 valor] d) Faça o diagrama de blocos deste sistema, onde deverá incluir a presença de uma força ascensional (F) de perturbação. [2 valores] e) Mostre que a função de transferência da entrada u(t) para a saída de posição x(t) é dada por 1 Gp s = . s 10s + 1 () ( ) Pretende-se desenhar um controlador de altitude para este veículo, com base em informação obtida por um GPS de precisão instalado a bordo, que fornece medidas de x(t). A primeira especificação que se tem de cumprir é obviamente a de que o sistema em anel fechado seja estável. [2 valores] f) Considere a utilização de um anel de realimentação em que se vai explorar um controlador dado por Gc(s)=K, onde K ∈ R. Indique para que intervalo de K o sistema é estável, recorrendo à informação obtida no diagrama do lugar geométrico das raízes. Para melhorar o conforto dos passageiros e rapidez do sistema, pretende-se que as seguintes especificações sejam também cumpridas: Mp - máximo sobreimpulso < 20% ts – tempo de estabelecimento a 5% < 3 s [1 valor] g) Mostre que se conseguirmos obter um sistema em anel fechado com a equação característica C(s)=s2+2s+2, todas as especificações anteriores são cumpridas. [1 valor] h) Comente a seguinte afirmação: “Se o sistema de transporte vier a ser controlado com um controlador com ganho escalar constante, nunca se conseguirá ter as especificações requeridas.” Para cumprir com todas as especificações, considere de seguida o controlador (derivativo) Gc(s)=Kd (s+z), onde Kd e z são os valores de um ganho e a posição de um zero, respectivamente. [1 valor] i) Recorrendo à colocação dos pólos da equação característica em anel fechado, determine os valores de Kd e z. [2 valores] j) Faça o diagrama de Bode assimptótico do anel aberto contendo o sistema original e o controlador encontrado. Caso não tenha resolvido a alínea anterior, considere Kd=30 e z=1. [1 valor] k) Determine as margens de ganho e fase, com base no diagrama de Bode. [2 valores] l) Determine o valor analítico da Margem de Fase. Comente os valores obtidos pelos dois métodos. [2 valores] m) Faça o diagrama de Nyquist para este sistema e discuta a estabilidade do sistema, com este novo controlador. Marque no diagrama a margem de fase. [1 valor] n) Calcule os erros estacionários de posição e velocidade, para o sistema em causa.
Baixar