Universidade Federal de Santa Catarina
Departamento de Engenharia Mecânica
Grupo de Análise e Projeto Mecânico
CURSO DE ESTABILIDADE ESTRUTURAL
Prof. José Carlos Pereira
Florianópolis, outubro de 2005
SUMÁRIO
1 – FLAMBAGEM DE COLUNAS _______________________________________ 1
1.1 – Introdução ___________________________________________________ 1
1.2 – Análise de colunas ____________________________________________ 1
1.3 – Equilíbrio adjacente ____________________________________________ 5
1.4 – Coluna levemente curvada ______________________________________ 8
2 – BARRAS RETAS ________________________________________________ 10
2.1 – Introdução __________________________________________________ 10
2.2 – Instabilidade em flexão de colunas _______________________________ 10
2.2.1 – Influência das condições de contorno _________________________ 10
2.2.2 – Colunas com restrições elásticas em rotação ___________________ 15
2.3 – Colunas pórticos _____________________________________________ 20
3 – PLACAS RETANGULARES_
RETANGULARES________________________________________ 30
3.1 – Introdução __________________________________________________ 30
3.2 – Teoria de elementos de placa em flexão_
flexão___________________________ 30
3.3 – Equações não lineares de equilíbrio ______________________________ 33
3.4 – Energia potencial estacionária __________________________________ 36
3.5 – Equações lineares de estabilidade _______________________________ 42
3.5.1 – Critério do equilíbrio adjacente _______________________________ 42
3.5.2 – Critério da mínima energia potencial __________________________ 44
3.6 – Aplicações das equações de estabilidade_
estabilidade__________________________ 47
3.6.1 – Placa simplesmente apoiada nas quatro extremidades ____________ 47
3.6.2 – Outras condições de contorno _______________________________ 50
3.6.3 – Carregamento cisalhante ___________________________________ 53
3.6.4 – Carregamento combinado __________________________________ 55
4 – CASCAS CILÍNDRICAS CIRCULARES ______________________________ 59
4.1 – Introdução __________________________________________________ 59
4.2 – Equações diferenciais não lineares de equilíbrio - Donnell_
Donnell_____________ 59
4.2.1 – Soma das forças e dos momentos ____________________________ 60
4.2.2 – Energia potencial estacionária _______________________________ 64
4.3 – Forma de Donnell para as equações lineares de estabilidade __________ 68
4.3.1 – Critério do equilíbrio adjacente _______________________________ 68
4.3.2 – Critério da mínima energia potencial __________________________ 71
4.4 – Aplicações das equações de estabilidade_
estabilidade__________________________ 73
4.4.1 – Pressão lateral uniforme ____________________________________ 73
4.4.2 – Compressão axial _________________________________________ 77
4.4.3 – Torção __________________________________________________ 81
4.4.4 – Carregamento combinado __________________________________ 83
5 – CASCAS GENÉRICAS ___________________________________________ 86
5.1 – Introdução __________________________________________________ 86
5.2 – Equações diferenciais de equilíbrio não lineares ____________________ 86
5.3 – Equações lineares de estabilidade _______________________________ 90
5.3.1 – Critério da energia potencial mínima __________________________ 90
5.3.2 – Critério do equilíbrio adjacente _______________________________ 93
5.4 – Cascas de revolução __________________________________________ 94
5.4.1 – Equações de estabilidade com rotações de pré-flambagem retidas __ 96
5.4.2 – Equações de estabilidade com rotações de pré-flambagem omitidas _ 98
5.5 - Aplicações das equações de estabilidade _________________________ 100
6 – MÉTODO DOS ELEMENTOS FINITOS EM ESTABILIDADE _____________ 101
6.1 – Estabilidade em vigas ________________________________________ 101
6.2 – Matrizes de rigidez de um elemento de viga _______________________ 101
6.3 – Matriz de rigidez de um elemento de barra ________________________ 115
6.4 – Estabilidade em pórticos ______________________________________ 118
6.5 – Estabilidade em placas _______________________________________ 125
A – MÉTODOS VARIACIONAIS ______________________________________ 133
A.1 – Métodos Variacionais em Sistemas Contínuos_
Contínuos_____________________ 134
A.2 – Equações de Euler __________________________________________ 137
A.3 –Critério de Trefftz ____________________________________________ 139
Bibliografia
[1] Brush, D. O. and Almoroth, B. O., Buckling of Bars, Plates and Shells, McGrawHill, 1975.
[2] Timoshenko, S. P. and Gere, J. M., Theory of Elastic Stability, McGraw-Hill, 1961,
2a edição.
[3] Yang, T, Y., Finite Element Structural Analysis, Prentice-Hall, 1986.
Curso de Estabilidade Estrutural
1
1 – FLAMBAGEM DE COLUNAS
1.1 – Introdução
O projeto de elementos estruturais e de máquinas é baseado em três
características: resistência, rigidez e estabilidade. No estudo da flambagem de
colunas, onde se analisa a possibilidade de instabilidade dos sistemas estruturais,
deve-se obter parâmetros críticos adicionais que determinam se uma dada
configuração ou deformação em um dado sistema é permitido.
Para o estudo da flambagem de vigas, utilizar-se-á barras delgadas,
denominadas colunas, com carregamento axial, submetidas simultaneamente à
flexão. O problema consiste portanto em determinar as magnitudes das cargas
axiais críticas nas quais ocorre flambagem e as correspondentes formas das colunas
flambadas.
1.2 – Análise de colunas
Considere uma coluna de comprimento L sujeita à uma carga compressiva
passando pelo centróide as seção transversal, Fig. 1.1. Os esforços internos
atuando num elemento infinitesimal da coluna são: N, componente longitudinal da
força, Q, componente transversal da força e M o momento fletor, Fig. 1.2. Para levar
em consideração a influência da rotação no comportamento da coluna, as equações
de equilíbrio serão obtidas em um elemento levemente deformado. Neste caso, as
rotações de seção β são assumidas pequenas comparadas com a unidade, logo:
sen β ≈ β e cos β ≈ 1. As equações diferenciais de equilíbrio são obtidas impondo o
equilíbrio estático das forças nas direções x e z, e o equilíbrio de momentos.
z
x
x
dx
P
P
Figura 1.1 – Coluna sujeita à compressão
Flambagem de Colunas
2
z
x
N
β
M
Q
Q+dQ
β+dβ
M+dM
N+dN
Figura 1.2 – Forças e momentos atuando em um elemento de coluna deformado
O equilíbrio das forcas na direção x fornece:
→
∑ Fx = 0
, −N + (N + dN) − Q β + (Q + dQ)(β + dβ) = 0
N'+ Q β '+ β Q' = 0
onde N' =
(1.1)
dN
dQ
dβ
.
, Q' =
e β' =
dx
dx
dx
O equilíbrio das forcas na direção z fornece:
↑
∑ Fz = 0
,
−Q + (Q + dQ) + N β − (N + dN)(β + dβ) = 0
−N β ' −β N'+ Q' = 0
(1.2)
E, o equilíbrio de momentos fornece:
∑M = 0
, M − (M + dM) − Q dx = 0
Q = −M '
(1.3)
Para colunas esbeltas em consideração, as interações entre as forças de
cisalhamento transverso e as rotações podem ser desprezíveis, assim, as eqs. (1.1),
(1.2) e (1.3) se tornam:
N' = 0
Q'− N β ' = 0
Q = −M'
(1.4)
Curso de Estabilidade Estrutural
3
Derivando a força transversa Q e substituindo na segunda equação da eq.
(1.4), temos:
N' = 0
M''+ N β ' = 0
(1.5)
A eq. (1.5) expressa o equilíbrio de uma coluna esbelta contendo 3 incógnitas,
N, M e β.
Sabe-se da teoria de flexão de vigas que:
dw
dx
2
d w
M
=
2
E I
dx
β=−
(1.6)
onde w é o deslocamento transverso, E o módulo de elasticidade do material da viga
e I o momento de inércia da seção transversal.
Reagrupando a eq. (1.6), temos:
β = −w '
M = EIw ''
(1.7)
Derivando a eq. (1.7) e substituindo na eq. (1.5), o equilíbrio de uma coluna
esbelta se reduz agora a 2 incógnitas.
N' = 0
(EIw '')''− N w '' = 0
(1.8)
Para o caso da rigidez EI ser constante ao longo do comprimento da coluna:
N' = 0
EIw iv − N w '' = 0
(1.9)
Da eq. (1.9), conclui-se que a força longitudinal é constante e igual a, N = - P.
Conseqüentemente, chega-se a expressão familiar de uma coluna esbelta em
flambagem:
EIw iv + P w '' = 0
(1.10)
Flambagem de Colunas
4
Apesar do fato da eq. (1.10) levar em consideração a influência da não
linearidade geométrica devido ao termo P w’’, a equação é uma equação diferencial
linear para valores fixos de P.
A solução da eq. (1.10) tem a forma:
w(x) = C1 senkx + C2 coskx + C3 x + C4
onde k 2 =
(1.11)
P
e as constantes C1, C2, C3 e C4 são determinadas aplicando-se as
EI
condições de contorno do problema. Para a coluna bi-articulada, conforme mostrado
na Fig. 1.1, as condições de contorno são:
P / x = 0 ⇒ w(0) = 0 e M(0) = E I w ''(0) = 0
P / x = L ⇒ w(L) = 0 e M(L) = E I w ''(L) = 0
(1.12)
Aplicando a eq. (1.12) na eq. (1.11), temos:
C2 = C3 = C4 = C1 senkL = 0
(1.13)
Na forma deformada, C1 deve ser diferente de zero, logo:
sen k L = 0 ⇒
kL=nπ
(1.14)
Substituindo o valor de k na eq. (1.14), elevando ao quadrado e isolando a
carga Pn:
Pn =
n2 π2E I
L2
(1.15)
Como a carga crítica procurada é o menor valor na qual a coluna flamba, n =
1. Assim, a carga crítica para uma coluna biapoiada tem a expressão, denominada
carga de flambagem de Euler:
Pcr =
π2E I
L2
(1.16)
Substituindo a relação k L = n π na expressão de deflexão, eq. (1.11), tem-se
o modo com que a coluna irá deformar, ou a forma flambada da coluna:
Curso de Estabilidade Estrutural
w(x) = C1 sen
5
n π
x
L
(1.17)
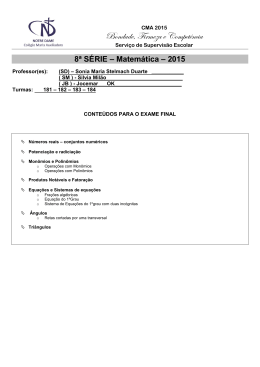
A curva que exprime o equilíbrio de uma coluna bi-articulada, pode ser obtida
plotando a carga P versus a deflexão no meio do vão da coluna (w para x=L/2), Fig.
1.3.
P
trajetória
primária
-w
Pcr =
π2E I
L2
trajetória
secundária
w para x=L/2
+w
Figura 1.3 – Curva de equilíbrio para uma coluna bi-articulada
Na Fig. 1.3, os pontos ao longo da trajetória primária representam o equilíbrio
de colunas comprimidas, porém ainda retas. No entanto, pontos situados ao longo
da trajetória secundária representam o equilíbrio de colunas comprimidas fletidas. A
simetria da Fig. 1.3 indica que a coluna pode se deslocar em qualquer direção. A eq.
(1.16) fornece o ponto de bifurcação e a eq. (1.17) a trajetória secundária.
A
trajetória secundária permanece horizontal por causa da independência entre a
carga P e a deflexão w.
1.3 – Equilíbrio adjacente
A equação diferencial que exprime o equilíbrio da coluna na segunda
trajetória, eq. (1.10) é linear por causa da força interna N que é independente da
coordenada x, eq. (1.9a). Isto é uma peculiaridade de colunas e nos casos mais
gerais como placas, anéis e cascas, a equação diferencial que exprime o equilíbrio
do elemento é não linear. No entanto, pontos de intersecção entre a trajetória
primária e secundária, ou seja, pontos que fornecem a expressão de carga crítica,
equações diferenciais lineares podem ser utilizadas. Estas equações diferenciais
lineares são obtidas das equações não lineares usando a técnica da perturbação, na
Flambagem de Colunas
6
qual o deslocamento u é substituído por u0 + u1, onde u é o campo de deslocamento,
u0 representa o deslocamento de uma configuração de equilíbrio e u1 um pequeno
incremento. Todos os termos contendo u0 se anulam por ser uma configuração de
equilíbrio, enquanto que somente os termos de primeira ordem em u1 são retidos.
Para ilustrar a linearização de equações diferenciais de equilíbrio, tomaremos
a equação de uma coluna. Esta técnica no entanto, é valida para os casos mais
gerais. Considere então a relação:
N = EA
du
= EAε
dx
(1.18)
A expressão de deformação não linear, pode ser dada da forma:
2
du 1 dw
1
2
ε=
+
= u'+ ( w ' )
dx 2 dx
2
(1.19)
Substituindo a eq. (1.19) na eq. (1.18) e posteriormente substituindo nas eqs.
(1.9), temos:
1
2
E A u'+ ( w ' ) ' = 0
2
1
2
EIw iv − E A u'+ ( w ' ) w '' = 0
2
(1.20)
Substituindo o campo de deslocamentos u e w por u0 + u1 e w0 + w1,
respectivamente, e considerando que:
Os deslocamentos u0 e w0 satisfazem a eq. (1.20) por serem deslocamentos
de uma configuração de equilíbrio,
Termos de segunda e terceira ordem em u1 e w1 podem ser omitidos por
serem valores incrementais.
Assim, na eq. (1.20a), temos:
1
'2
+
+
+
u
u
'
w
w
(
)
(
)
0
1
0
1
' = 0
2
' 1 ' 2 ' 1 ' 2
'
'
u0 + 2 w 0 + u1 + 2 w1 + w 0 w1 ' = 0
u1' + w 0' w1' ' = 0
E na eq. (1.20b), temos:
(1.21)
Curso de Estabilidade Estrutural
1
iv
'2
EI ( w 0 + w1 ) − E A ( u0 + u1 ) '+ ( w 0 + w1 ) ( w 0 + w1 ) '' = 0
2
1
EIw iv0 − EA u'0 + w 0' 2 w 0" − EA u'1 + w 0' w1' w 0"
2
1
+EIw1iv − EA u'0 + w 0' 2 w1" − EA u'1 w1" + w 0' w1' w1" = 0
2
1
EIw1iv − EA u'0 + w 0' 2 w1" − EA u'1 + w 0' w1' w 0" = 0
2
7
(1.22)
As eqs. (1.21) e (1.22) são lineares em u1 e w1, como desejado, sendo que u0
e w0 são coeficientes.
Para colunas, o equilíbrio da trajetória primária representa uma configuração
não fletida, ou seja, o deslocamento transversal w0 = 0 (w’0 = w”0 = 0) . Assim, as
eqs. (1.21) e (1.22) reduzem a:
u1" = 0
EIw1iv − E A u'0 w1" = 0
(1.23)
O deslocamento u0 numa configuração não fletida de uma coluna é da
seguinte forma:
u0 = −
P
x
EA
(1.24)
Introduzindo a eq. (1.24) na eq. (1.23), tem-se:
EIw1iv + P w1" = 0
(1.25)
A eq. (1.25) é a equação diferencial de equilíbrio linearizada para colunas
numa configuração levemente fletida. Soluções não triviais da eq. (1.23)
representam configurações de equilíbrio, adjacentes a forma reta da coluna, onde
ocorre um ponto de bifurcação. A eq. (1.25) é análoga a eq. (1.10), exceto que w é
substituído por w1. A solução da eq. (1.25) fornece o ponto de bifurcação, ou seja, a
carga crítica. No entanto, como w1 é um pequeno incremento, nenhuma informação
é obtida sobre a inclinação inicial ou a forma da trajetória secundária (modo de
flambar).
Flambagem de Colunas
8
1.4 – Coluna levemente curvada
Geralmente as estruturas não são perfeitamente retas, como as colunas têm
sido consideradas até agora. As imperfeições iniciais podem ser consideradas para
se avaliar o comportamento de estruturas sob cargas compressivas. Para ilustrar
este problema, considere uma coluna bi-articulada, cuja forma inicial pode ser
representada por uma série infinita:
w* =
∞
∑ Cm* sin
m=1
mπx
L
m = 1,2,3,…
(1.26)
*
onde Cm
são constantes conhecidas.
A inclinação é aumentada de uma inclinação inicial, também pequena, do tipo:
dw *
β =−
= −(w * )'
dx
*
(1.27)
Substituindo a eq. (1.27) na eq. (1.5), tem-se:
(
)
M''+ N β + β* ' = 0
(1.28)
Substituindo a eq. (1.7) na eq. (1.28) e considerando que o momento interno
M surge somente quando surgir um deslocamento transversal w, a equação
resultante é da forma:
(
)
EIw iv + P w + w * '' = 0
(1.29)
Introduzindo a eq. (1.26) na eq. (1.29), temos:
∞
2
mπx
mπ *
EIw + P w '' = P ∑
Cm sin
L
m=1 L
iv
(1.30)
Contrariamente a equação diferencial de equilíbrio para uma coluna reta, eq.
(1.10), a eq. (1.30) é não homogênea. A solução desta equação é da forma:
w =
πx
2π x
3π x
PC2* sin
PC3* sin
L +
L +
L +…
2
2
2
π EI
4π EI
9π EI
−P
−P
−P
2
2
L
L
L2
PC1* sin
(1.31)
Curso de Estabilidade Estrutural
9
É possível verificar na eq. (1.31) que, a magnitude do deslocamento
transversal w aumenta na medida que a carga aplicada P se aproxima de
π2EI
. Isto
L2
*
acontece independentemente da forma inicial da coluna e dos coeficientes Cm
,
desde que ao menos C1* ≠ 0 .
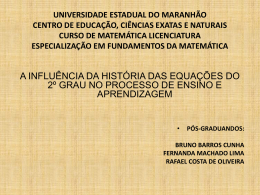
Para ilustrar o problema, a Fig. 1.4 apresenta a
evolução da carga aplicada P versus o deslocamento no meio do vão da coluna, na
qual é considerado C1* > 0 e todos os outros coeficientes nulos.
C1*
Pcr =
π2E I
L2
P
w para x=L/2
Figura 1.4 – Curva de equilíbrio para uma coluna bi-articulada levemente curvada
Uma comparação da Figs. (1.3) e (1.4) mostra que para grandes
deslocamentos a carga crítica, tanto para uma coluna reta como para uma coluna
levemente curva, ocorre em Pcr =
π2E I
.
L2
10
Barras Retas
2 – BARRAS RETAS
2.1 – Introdução
Este capítulo trata da instabilidade em flexão e em torção de colunas
inicialmente retas, instabilidade lateral de vigas e a instabilidade não linear em flexão
e em torção de colunas tipo viga. Para todos os casos, as equações diferenciais de
equilíbrio são lineares e o procedimento de linearização discutido no capítulo
anterior não será necessário.
2.2 – Instabilidade em flexão de colunas
2.2.1 – Influência das condições de contorno
A equação de equilíbrio de uma coluna inicialmente reta e levemente fletida,
como mostrada no capítulo anterior é da forma:
EIw iv + P w '' = 0
(2.1)
A solução da eq. (2.1) tem a forma:
w(x) = C1 senkx + C2 coskx + C3 x + C4
onde k 2 =
(2.2)
P
e as constantes C1, C2, C3 e C4 são determinadas aplicando-se as
EI
condições de contorno do problema.
a) Coluna bi-articulada:
A carga crítica nestas condições de contorno, conforme visto anteriormente é:
Pcr =
π2E I
L2
(2.3)
E a forma da coluna fletir é dada pela eq. (2.4), conforme ilustra a Fig. 2.1:
w(x) = C1 sen
n π
x
L
(2.4)
Curso de Estabilidade Estrutural
11
L
P
P
Figura 2.1 – Forma flambada de uma coluna bi-articulada
b) Coluna bi-engastada
Para uma coluna engastada nas duas extremidades, as condições de
contorno são:
P / x = 0 ⇒ w(0) = 0 e w'(0) = 0
P / x = L ⇒ w(L) = 0 e w'(L) = 0
(2.5)
Aplicando as condições dadas pela eq. (2.5) na eq. (2.2), e colocando na
forma matricial, temos:
1
0
k
0
senkL
coskL
k coskL −k s enkL
0 1 C1
1 0 C2
=0
L 1 C3
1 0 C4
(2.6)
Rearranjando as equações do sistema da eq. (2.6), as relações entre as
constantes é: C2 =
( coskL − 1) C
s enkL
1
, C3 = - kC1 e C4 = - C2. Substituindo as constantes
na terceira ou quarta equações, resulta em:
kL s enkL + 2coskL − 2 = 0
(2.7)
Sabendo que:
kL
kL
cos
2
2
kL
coskL = 1 − 2sen2
2
s enkL = 2sen
(2.8)
Substituindo a eq. (2.8) na eq. (2.7), tem-se:
2 s en
kL
kL
kL
kLcos
− 2s en = 0
2
2
2
(2.9)
12
Barras Retas
Uma solução da eq. (2.9) é:
s en
kL
=0
2
⇒
kL
= nπ
2
n = 1,2,3…
(2.10)
Substituindo o valor de k na eq. (2.10), elevando ao quadrado e isolando a
carga Pn:
Pn =
22 n2 π2E I
L2
(2.11)
Como a carga crítica procurada é o menor valor na qual a coluna se torna
instável, n = 1. Assim, a carga crítica para uma coluna engastada nas extremidades,
com esta solução, tem a expressão:
Pcr =
4π2E I π2E I
=
2
L2
L
2
( )
(2.10)
Substituindo a relação k L = 2 π no sistema de equações lineares dado pela
eq. (2.6), as constantes podem ser obtidas e são: C1 = C3 = 0 e C4 = - C2.
Substituindo as constantes na expressão de deflexão, eq. (2.2), tem-se o modo com
que a coluna irá deformar, ou a forma flambada da coluna:
2πx
w(x) = C4 1 − cos
L
(2.11)
A outra solução da eq. (2.9) é:
tan
kL kL
=
2
2
(2.12)
A menor raiz da eq. (2.12) é (ver Fig. 2.2):
kL
= 4,49
2
(2.13)
Curso de Estabilidade Estrutural
13
y
tan kL/2
tan kL/2
tan kL/2
y=kL/2
4,49
π/2
π 3π/2
x = kL/2
2π
Figura 2.2 – Solução da eq. (2.12)
Substituindo o valor de k na eq. (2.13), elevando ao quadrado e isolando a
carga Pn:
22 4,492 E I
Pcr =
L2
(2.14)
Comparando as duas cargas críticas dadas pelas eqs. (2.10) e (2.14),
percebe-se que a menor carga crítica é a da eq. (2.10).
Derivando duas vezes a eq. (2.11) e igualando a zero, encontramos um ponto
de inflexão, ou um ponto onde o momento é nulo, x = L/4. Como a coluna engastada
nas duas extremidades é simétrica, percebe-se que a distância entre dois pontos de
momento nulo é L/2, Fig. 2.3.
z
L/2
L/4
P
L/4
P
x
Figura 2.3 – Forma flambada de uma coluna engastada nas extremidades
14
Barras Retas
c) Coluna engastada-articulada
Para uma coluna engastada numa extremidade e articulada na outra, as
condições de contorno são:
P / x = 0 ⇒ w(0) = 0 e w'(0) = 0
P / x = L ⇒ w(L) = 0 e w''(L) = 0
(2.15)
Aplicando as condições dadas pela eq. (2.15) na eq. (2.2), e colocando na
forma matricial, temos:
1
0
0
k
0
1
senkL coskL L
senkL coskL 0
1 C1
0 C2
=0
1 C3
0 C4
(2.16)
Substituindo a quarta equação na terceira, tem-se as seguintes relações: C2 =
- C4, C3 = - C1 k e C4 = - C3 L. Substituindo estas relações na quarta equação,
temos:
tankL = kL
(2.17)
A menor raiz da eq. (2.17) é (ver Fig. 2.2):
kL = 4,49
(2.18)
Substituindo o valor de k na eq. (2.18), elevando ao quadrado e isolando a
carga Pn, a carga crítica para uma coluna engastada numa extremidade e articulada
na outra tem a expressão:
Pcr =
π2E I
2,04π2E I
=
L2
( 0,7L )2
(2.19)
Substituindo a eq. (2.17) no sistema de equações lineares dado pela eq.
(2.16), as constantes podem ser obtidas e são: C2 = -kLC1, C3 = -kC1, C4 = kLC1.
Substituindo as constantes na expressão de deflexão, eq. (2.2), tem-se o modo com
que a coluna irá deformar, ou a forma flambada da coluna:
w(x) = C1 [ senkx − kL coskx + k(L − x)]
(2.20)
Curso de Estabilidade Estrutural
15
Pode-se perceber aqui também que a distância entre dois pontos de momento
nulo é 0,7 L, Fig. 2.4.
z
0,7L
P
P
x
Figura 2.4 – Forma flambada de uma coluna engastada-articulada
2.2.2 – Colunas com restrições elásticas em rotação
Este caso trata de problemas de colunas com restrições elásticas em rotação
e restrições rígidas em deslocamento. As condições de contorno gerais para este
tipo de problema são, Fig. 2.5:
P / x = 0 ⇒ w(0) = 0 e w'(0) = −
M1
= −β1
α1
(2.21)
M
P / x = L ⇒ w(L) = 0 e w'(L) = 2 = β2
α2
onde α1 e α2 são rigidezes rotacionais.
z
β2
y
P
X
M1
β1
x
P
w’(L)
w’(0)
L
M2
Figura 2.5 – Restrições elásticas em rotação
Aplicando as condições dadas pela eq. (2.21) na eq. (2.2), e colocando na
forma matricial, temos:
16
Barras Retas
0
1
k
0
senkL
coskL
k coskL −ksenkL
0
1
L
1
0
1 C1 M1
−
0 C2 α1
=
1 C3 0
0 C4 M2
α 2
(2.22)
Da equação diferencial de viga, sabe-se que:
d2 w
M=EI 2
dx
(2.23)
Aplicando a eq. (2.23) na eq. (2.2), tem-se:
M1 = − EIk 2 C2
(2.24)
M2 = − EIk 2 (C1senkL + C2 coskL)
Introduzindo a eq. (2.24) no sistema de equações dado pela eq. (2.22):
0
1
Φ
−λ1Φ2
senΦ
cosΦ
ΦcosΦ + λ 2Φ2senΦ − Φ s enΦ − λ 2Φ2cosΦ
(
)
0 1 C
1
L 0 C2
=0
L 1 C3
L 0 C4
(2.25)
onde:
λ1=
EI
α1L
λ2 =
EI
α 2L
(2.26)
Φ = kL
A solução não trivial do sistema de equações homogêneas, eq. (2.25), é da
forma:
(1− λ
1
)
(
)
− λ 2 − λ1λ 2Φ2 ΦsenΦ + 2 + λ1Φ2 + λ 2Φ2 cosΦ − 2 = 0
(2.27)
Para o caso especial de restrições iguais nas duas extremidades, λ1=λ2=λ, a
eq. (2.27) se simplifica:
Curso de Estabilidade Estrutural
(
17
)
Φ
Φ
2
tan 2 + λΦ 2 + λΦ tan 2 − Φ = 0
(2.28)
As raízes da eq. (2.28) são da forma:
Φ
Φ
= −2λ
2
2
Φ
Φ
2
tan =
2 1 + 2λ Φ
tan
(2.29)
( 2)
2
Sabe-se que λ ≥ 0, −2λ
0≤
Φ
2
1 + 2λ Φ
( 2)
2
≤
( )
2
Φ
≤ 0 e como 1 + 2λ Φ
> 1 , a relação
2
2
Φ
é verdadeira.
2
y
π/2
π 3π/2
tan Φ/2
tan Φ/2
tan Φ/2
y=Φ
y=
2
Φ
2
1 + 2λ Φ
( 2)
x=
Φ
2
y = −2λ
Φ
2
2π
2
Figura 2.6 – Solução das eq. (2.26)
Pela Fig. 2.6, observa-se que a menor raiz é:
tan
Φ
= −λΦ
2
(2.30)
18
Barras Retas
As expressões que fornecem a carga crítica para os três casos analisados até
o momento, bi-articulada, bi-engastada e engastada-articulada são respectivamente,
(2.3), (2.10) e (2.16). Estas expressões podem ser obtidas a partir da eq. (2.30) da
forma:
1 – Para uma coluna bi-articulada, α1 = α2 = 0. Então λ → ∝ e, da eq. (2.30),
tan
Φ
Φ π
π2E I
= −∞ ⇒
= ⇒ kL = π . Logo, a carga crítica é da forma Pcr = 2 .
2
2 2
L
2 – Para uma coluna bi-engastada, α1 = α2 = → ∝. Então λ = 0 e, da eq. (2.30),
tan
Φ
Φ
π2E I
.
=0 ⇒
= π ⇒ kL = 2π . Logo, a carga crítica é da forma Pcr =
2
2
( 0,5L )2
3 – Para uma coluna engastada para x = 0 e articulada para x = L, α1 → ∝ e α2 = 0,
logo λ1 = 0 e λ2 → ∝. A eq. (2.27) dividida por λ2 fornece
1 λ1
2 λ1 2
2
−
− 1 − λ1Φ2 ΦsenΦ +
+
Φ + Φ2 cosΦ −
= 0 , Substituindo λ1 = 0 e
λ2
λ2 λ2
λ2 λ2
λ2 → ∝, tem-se Φ ( −senΦ + ΦcosΦ ) = 0 . As raízes dessa equação são Φ = 0 e
tanΦ = Φ . Como a primeira raiz é a solução trivial, a solução do problema é tan kL =
kL. A expressão de carga crítica é então da forma Pcr =
π2E I
( 0,7L )2
.
d) Coluna engastada-livre
Em todos os casos considerados anteriormente, as colunas eram rigidamente
restringidas com relação ao deslocamento lateral (w = 0 para x = 0, L). Considere
agora um caso de uma coluna engatada-livre, Fig. 2.7.
z
L
P
δ
x
P
Figura 2.7 – Forma flambada de uma coluna engastada-livre
Curso de Estabilidade Estrutural
19
Considerando a eq. (2.23), que k 2 =
Q= −
P
e que:
EI
dM
dx
(2.31)
as condições de contorno para este caso são as seguintes:
P / x = 0 ⇒ w(0) = 0, w'(0) = 0 e w''(0)=
P / x = L ⇒ w(L) = δ
Pδ
EI
(2.32)
e w''(L) = 0
Introduzindo as eqs. (2.32) na eq. (2.2), as constantes podem ser obtidas e
são da forma, C1 = C3 = 0, C2 = -C4 e C2 cos kL=0. Logo, a equação que fornece o
deslocamento transversal é da forma:
w(x) = C4 (1 − coskx )
(2.33)
Considerando a solução não trivial de C2 cos kL=0, temos:
kL=(2n+1)
π
2
(n = 0, 1, 2,...)
Assim, considerando que k 2 =
Pcr =
π2E I
(2L)2
(2.34)
P
, a carga crítica, para n = 0, é da forma:
EI
(2.35)
Pode-se perceber aqui também que a distância entre dois pontos de momento
nulo é 2 L, Fig. 2.7.
De uma forma geral, a expressão que fornece a carga crítica de uma coluna
para uma é:
Pcr =
π2E I
(KL)2
(2.36)
onde KL é o comprimento efetivo (ou equivalente) da coluna e, é função das
condições de contorno da coluna.
20
Barras Retas
2.3 – Colunas pórticos
a) Pórtico plano bi-apoiado
Considere um pórtico restrito de maneira a deformar-se somente no plano,
Fig. 2.8. A coluna e a viga têm comprimento L e rigidez EI. Estes elementos estão
rigidamente unidos e as colunas nos suportes estão articuladas.
P
P
P
δ2
P
L
L
(a)
(b)
Figura 2.8 – Possíveis formas flambadas de um pórtico plano
Na forma flambada (a), onde os deslocamentos transversais das colunas são
restritos, pode-se utilizar a eq. (2.27), onde a rigidez rotacional na extremidade
inferior (articulação), é nula, α1 = 0, logo λ1 → ∝. A eq. (2.27), dividida por λ1 é então
da forma:
1
2
λ2
λ
2
− λ 2Φ2 ΦsenΦ + + Φ2 + 2 Φ2 cosΦ −
=0
− 1−
λ1
λ1
λ1
λ1
λ1
(2.37)
O que reduz-se a:
(1+ λ Φ ) senΦ = ΦcosΦ
2
2
Considerando que Φ = kL , temos:
(2.38)
Curso de Estabilidade Estrutural
tankL =
21
kL
1 + λ 2 ( kL )
(2.39)
2
Da teoria de deflexão de vigas, se a viga se deformar na forma de um arco
(a), a rotação em um apoio de uma viga bi-articulada submetido à momentos de
mesma intensidade nos apoios, porém de sentido contrário, é da forma,
β2 =
M2L M2L M2L
+
=
(ver Figura 2.9).
3EI 6EI 2EI
P
β2
M2
P
M2
M2
M2
β2
β2
Figura 2.9 – Deformada da viga na forma de um arco
A influência do deslocamento vertical no apoio pode ser considerada
desprezível. Como, β2 =
λ2 =
M2
2EI
, a rigidez rotacional neste ponto é α 2 =
. Logo,
α2
L
EI
1
= . Conseqüentemente:
α 2L 2
tankL =
kL
1
2
1 + ( kL )
2
(2.40)
22
Barras Retas
y
tan kL
tan kL
tan kL
y=kL
y=
3,59
π/2
π 3π/2
kL
1
2
1 + ( kL )
2
x = kL
2π
Figura 2.10 – Solução da eq. (2.40)
A menor raiz da eq. (2.40) é conforme mostrado na Fig. 2.10 é, kL=3,59.
Como, k 2 =
Pcr =
P
, a carga crítica para a coluna do pórtico é da forma:
EI
3,592 EI
L2
⇒
Pcr =
π2EI
π
3,59 L
2
⇒
Pcr =
π2EI
( 0,87L )2
(2.41)
Percebe-se que a carga crítica encontrada está entre a carga de uma coluna
apoiada-engastada, Pcr =
Pcr =
π2EI
L2
π2EI
( 0,7L )
2
e a carga crítica de uma coluna bi-apoiada,
.
No entanto, se a viga se deformar na forma de um S (b), a rotação em um
apoio de uma viga bi-articulada submetido à momentos de mesma intensidade nos
apoios, agora de mesmo sentido, é da forma, β2 =
M2L M2L M2L
−
=
, (ver Figura
3EI 6EI 6EI
Curso de Estabilidade Estrutural
23
2.11). Logo, a rigidez rotacional é α 2 =
M2 6EI
=
. Como neste caso, o deslocamento
β2
L
lateral não é nulo, assim a eq. (2.27) não é mais válida.
Para resolver este problema, é preciso resolver a equação diferencial da
forma:
EI
d2 w
=M=Pw
dx
(2.42)
M2
P
β2
P
β2
δ2
M2
M2
M2
Figura 2.11 – Deformada da viga na forma de um S
A solução da eq. (2.42) tem a forma:
w(x) = C1 senkx + C2 coskx + C3 x + C4
(2.43)
As condições de contorno para este tipo de problema são:
P / x = 0 ⇒ w(0) = 0, w''(0) = 0
P / x = L ⇒ w(L) = −δ2 , EIw''(L) = M2
(2.44)
Aplicando as eqs. (2.44) na eq. (2.43), tem-se:
w(0) = C2 + C4 = 0
w''(0) = C2 = 0
w(L) = C1senkL + C2 coskL + C3L + C4 = −δ2
(
)
EIw''(L) = EI −C1k 2 senkL − C2k 2 coskL = M2
(2.45)
24
Barras Retas
Pelo equilíbrio de momento, tem-se que M2 = Pδ2 e ainda, sabe-se que
k2 =
P
. Logo as constantes podem ser obtidas e são da forma, C2 = 0, C3 = 0, C4 =
EI
0 e C1 = −
w(x) = −
δ2
. Logo, a eq. (2.40) é da forma:
senkL
δ2
senkx
senkL
(2.46)
Da eq. (2.46), pode-se agora obter a inclinação e o momento para x = L,
β2 =
kδ 2
,
tankL
α2 =
M2
= EIk tankL . Igualando esta rigidez rotacional com a rigidez encontrada pela
β2
M2 = EIk 2 δ2 .
Assim,
a
rigidez
rotacional
neste
ponto
é
teoria de viga, tem-se:
tankL =
6
kL
(2.47)
tan kL
tan kL
tan kL
y
1,35
π/2
π 3π/2
y=
6
kL
2π
x = kL
Figura 2.12 – Solução da eq. (2.47)
A menor raiz da eq. (2.47) é conforme mostrado na Fig. 2.12 é, kL=1,35.
Como, k 2 =
P
, a carga crítica para a coluna do pórtico na forma deformada (b) é:
EI
Curso de Estabilidade Estrutural
25
π2E I
π2E I
Pcr = 0,184 2 =
L
(2,33L )2
(2.48)
Geralmente, quando o deslocamento lateral é nulo, K ≤ 1, e em caso contrário
K > 1, assim como apresentado pelas equações (2.41) e (2.48).
b) Pórtico plano bi-engastado
Considere um pórtico as colunas e a viga com comprimento L e rigidez EI.
Estes elementos estão rigidamente unidos e as colunas nos suportes estão
engastadas.
P
P
P
P
L
L
L
L
(a)
(b)
Figura 2.13 – Possíveis formas flambadas de um pórtico bi-engastado
Na forma flambada (a), onde os deslocamentos transversais das colunas são
restritos, pode-se utilizar a eq. (2.27), onde a rigidez rotacional na extremidade
inferior (articulação) é infinita, α1 → ∝., logo λ1 = 0. Assim, na eq. (2.27):
(1 − λ 2 ) ΦsenΦ + ( 2 + λ 2Φ2 ) cosΦ − 2 = 0
(2.49)
Substituindo a eq. (2.8) na eq. (2.46):
(1 − λ 2 ) Φ2sen
(
)
Φ
Φ
Φ
cos + 2 + λ 2 Φ2 1 − 2sen2 − 2 = 0
2
2
2
(2.50)
26
Barras Retas
Após algumas manipulações matemáticas, a eq. (2.50), se torna:
2sen
(
)
Φ
Φ
Φ
2
1
cos
2
Φ
sen
φ
−
λ
−
+
λ
+ λ 2 Φ2 = 0
(
)
2
2
2
2
2
(2.51)
Como no caso anterior (pórtico articulado) na forma deformada como um arco
(a), λ 2 =
2sen
1
. Logo em (2.51):
2
Φ Φ
Φ
1
Φ 1
cos − 2 + Φ2 sen + Φ2 = 0
2 2
2
2
2 2
(2.52)
y
20
15
10
5
x=φ
1
2
3
4
5
6
-5
-10
Figura 2.14 – Solução da eq. (2.52)
A primeira raiz da eq. (2.52) para a forma flambada (a) do pórtico é Φ = 5 .
Assim:
Pcr =
52 EI
L2
⇒
Pcr =
π2EI
π
L
5
2
⇒
Pcr =
π2EI
( 0,63L )
2
(2.53)
Percebe-se que a carga crítica encontrada está entre a carga de uma coluna
bi-engastada, Pcr =
Pcr =
π2EI
( 0,7L )2
.
π2EI
( 0,5L )2
e a carga crítica de uma coluna engastada-apoiada,
Curso de Estabilidade Estrutural
27
Na forma flambada (b), a eq. (2.27) não pode ser mais utilizada. O pórtico
nesta forma flambada pode ser separado nos seus elementos estruturais da forma
apresentada na Figura 2.15.
As condições de contorno para a coluna nesta configuração são:
P / x = 0 ⇒ w(0) = 0,
w'(0) = 0, EIw''(0) = −MR
(2.54)
P / x = L ⇒ w(L) = −δ2 , EIw''(L) = M2
M2
P
β2
P
δ2
β2
M2
M2
MR
M2
MR
Figura 2.15 – Deformada da viga na forma de um S
Aplicando as eqs. (2.54) na eq. (2.40), tem-se:
w(0) = C2 + C4 = 0
w'(0) = C1k + C3 = 0
(
)
EIw''(0) = EI −C2k 2 = −MR
(2.55)
w(L) = C1senkL + C2 coskL + C3L + C4 = −δ2
(
)
EIw''(L) = EI −C1k 2 senkL − C2k 2 coskL = M2
Pelo equilíbrio dos momentos na coluna, tem-se que MR = Pδ2 − M2 e sabe-se
ainda que k 2 =
P
. Logo:
EI
28
Barras Retas
C4 = −C2
C3 = −C1k
−PC2 = −Pδ2 + M2
(2.56)
C1senkL + C2 coskL − C1kL − C2 = −δ2
C1senkL + C2 coskL = −
M2
P
Desenvolvendo as eqs. (2.56):
C2 = δ 2 −
M2
P
(2.57)
M
− 2 − C1kL − C2 = −δ2
P
Substituindo uma equação na outra em (2.57), tem-se:
−
M2
M
− C1kL − δ2 − 2 = −δ2
P
P
⇒
C1 = 0
⇒
C3 = 0
(2.58)
Logo, a deformada da coluna tem a forma:
w(x) = C2 ( coskx − 1)
(2.59)
Da eq. (2.59), pode-se agora obter a inclinação e o momento para x = L,
β2 = C2ksenkL , M2 = −EIC2k 2 coskL . Assim, a rigidez rotacional neste ponto é
α2 =
M2 −EIk coskL
. Da teoria de vigas, a rigidez rotacional para a viga
=
β2
senkL
deformada na forma de um S é α 2 =
−EIk coskL 6EI
=
senkL
L
⇒
tankL =
−kL
6
M2 6EI
=
. Igualando as rigidezes, tem-se:
β2
L
(2.60)
A menor raiz da eq. (2.60) é conforme mostrado na Fig. 2.16 é, kL=2,72.
Como, k 2 =
P
, a carga crítica para a coluna do pórtico na deformada (b) é da forma:
EI
Curso de Estabilidade Estrutural
2,722 EI
Pcr =
L2
⇒
Pcr =
29
π2EI
π
2,72 L
⇒
2
Pcr =
π 2E I
(2.61)
(1,15L)2
Percebe-se novamente que, quando o deslocamento lateral é nulo, K ≤ 1, e
em caso contrário K > 1, assim como apresentado pelas equações (2.53) e (2.61).
tan kL
tan kL
tan kL
y
2,72
π/2
π 3π/2
x = kL
2π
y = - kL/6
y = -kL
Figura 2.16 – Solução da eq. (2.60)
30
Placas Retangulares
3 – PLACAS RETANGULARES
3.1 – Introdução
Este capítulo trata da instabilidade de placas retangulares submetidas à
diferentes carregamentos do tipo membrana. Para todos os casos, as equações
diferenciais de equilíbrio são não lineares e um procedimento de linearização será
necessário para a resolução das equações diferenciais de equilíbrio.
3.2 – Teoria de elementos de placa em flexão
Considere um elemento de placa infinitesimal de dimensões dx, dy, e
espessura h submetido à esforços de membrana e à uma carga distribuída p. Os
eixos x e y são colocados no plano médio da placa e o eixo z é medido a partir do
plano médio, Fig. 3.1.
z
dy
p
Qy
Qx
dx
Myx
Mxy
Mx
x
Nxy
y
My
Ny
Nyx
Nx
Figura 3.1 – Esforços internos atuantes sobre um elemento de placa
Os esforços internos são forças e momentos por unidade de comprimento e,
estão relacionados com as tensões internas pelas equações:
Curso de Estabilidade Estrutural
h/ 2
∫
Nx =
h/ 2
σ x dz
Ny =
−h / 2
∫
h/2
∫
τxy dz
h/2
τxz dz
Qy =
−h / 2
∫
∫
τyz dz
h/2
σ x z dz
−h / 2
My =
∫
∫
σ y z dz
−h / 2
h/ 2
h/2
Mxy =
(3.1)
−h / 2
h/ 2
Mx =
τxy dz
−h / 2
h/ 2
∫
∫
Nyx =
−h / 2
Qx =
σ y dz
−h / 2
h/2
Nxy =
31
τxy z dz
−h / 2
Myx =
∫
τyx z dz
−h / 2
As tensões σ x , τxy , etc., são tensões em um ponto qualquer ao longo da
espessura da placa, diferente de σx, τxy, etc., que são tensões na superfície média
(z=0).
A teoria de placas finas é obtida a partir das seguintes hipóteses
simplificadoras:
1 – Planos normais à superfície média indeformada permanecem normais, retos e
inextensíveis durante a deformação, conseqüentemente as deformações normais e
cisalhantes transversas obtidas do campo de deslocamentos são nulas,
2 – A tensão normal transversa e assumida ser muito pequena quando comparada
com as outras tensões normais, conseqüentemente ela pode ser desprezada.
Estas aproximações são conhecidas como hipóteses de Kirchhoff. Como
conseqüência, os deslocamentos em qualquer ponto da placa u, v e w podem ser
obtidos em termos dos deslocamentos u, v e w da superfície média, Fig. 3.2.
βy
v
z
v
z
w
y
w
h
Figura 3.2 – Normal a superfície média antes e depois da deformação
32
Placas Retangulares
u = u + z βx
v = v + z βy
(3.2)
w=w
onde βx = − w,x e βy = − w,y são rotações de seção relativo aos eixos y e x,
respectivamente.
As deformações são definidas sendo consideradas pequenas quando
comparadas à unidade, as rotações com relação aos eixos x e y são
moderadamente pequenas e a rotação com relação ao eixo z é desprezível. Logo as
deformações em um ponto genérico da placa é da forma:
1 2
w,x
2
1
εy = v,y + w,y2
2
γxy = u,y + v,x + w,x w,y
εx = u,x +
(3.3)
onde os índices precedidos de vírgula são derivadas com relação à x e y.
Introduzindo as eqs. (3.2) em (3.3) tem-se:
εx = ε x + z κ
εy = ε y + z κ y
(3.4)
γxy = γ xy + 2 z κ xy
onde εx, εy e γxz são deformações da superfície média e são dadas da forma:
1
ε x = u,x + β2x
2
1
ε y = u,y + β2y
2
γ xy = ( u,y + v,x ) + β xβ y
(3.5)
Os termos κx, κy e κxy são curvaturas e são dadas da forma:
κ x = β x,x
κ y = β y,y
κ xy =
1
(βx,y + βy,x )
2
(3.6)
Curso de Estabilidade Estrutural
33
A lei de Hooke generalizada para um estado plano de deformações para
materiais isotrópicos tem a forma:
1
σ x − ν ( σ y + σ z )
E
1
εy = σ y − ν ( σ z + σ x )
E
2 (1 + ν )
1
γxy = τxy =
τxy
G
E
εx =
(3.7)
onde ν e G são o coeficiente de poisson e o modulo de cisalhamento do material.
Como conseqüência da segunda hipótese da teoria de placa fina, σz = 0 .
A relação inversa da eq.(3.7) é da forma:
σx =
σy =
τxy =
E
( εx + νεy )
1 − ν2
(
)
E
(1 − ν )
2
( εy + νεx )
(3.8)
E
γxy
2 (1 + ν )
Introduzindo as eqs. (3.8) e (3.4) nas eqs. (3.1) e integrando, temos:
Nx = C ( ε x + νε y )
Mx = D ( κ x + νκ y )
Ny = C ( ε y + νε x )
My = D ( κ y + νκ x )
Nxy = C
1− ν
γ xy
2
(3.9)
Mxy = D (1 − ν ) κ xy
onde as constantes C e D são rigidezes extensional e flexional, respectivamente e,
são colocadas da seguinte forma:
Eh
C=
1 − ν2
D=
Eh3
(
12 1 − ν 2
)
(3.10)
3.3 – Equações não lineares de equilíbrio
Para levar em consideração as interações entre forças e rotações, as
equações representando o equilíbrio de forças e momentos devem ser obtidas para
um elemento de placa de dimensões dx e dy em uma configuração levemente
34
Placas Retangulares
deformada, Fig. 3.3. As forças e os momentos (ambos por unidade de comprimento)
estão colocados em suas posições positivas. As rotações βx e βy representam o
ângulo entre os eixos coordenados e as tangentes à superfície média no vértice
superior da placa. Como as forças e os momentos variam ao longo do elemento, a
notação Nx+ é usada para considerar (Nx+Nx,xdx). Como os ângulos βx e βy são
pequenos, pode-se considerar que sen βx = βx e sen βy = βy e, cos βx = cos βy = 1.
z
Nx
Nxy
Ny
Nyx
y
p
Qx
Qy
Qy+
βy
Ny+
Qx+
x
Nyx+
βx
Nxy+
Nx+
Mx
z
Mxy
Myx
My
y
Myx+
x
βx
Mx+
My+
βy
Mxy+
Figura 3.3 – Esforços internos em um elemento de placa numa configuração
deformada
Curso de Estabilidade Estrutural
35
Impondo o equilíbrio das forças na direção x, temos:
−Nx dy + (Nx + Nx,x dx ) dy − Nyx dx + (Nyx + Nyx,y dy ) dx = 0
(3.11)
Simplificando, a eq. (3.11) resulta em:
Nx,x + Nyx,y = 0
(3.12)
Do equilíbrio das forças na direção y, tem-se a seguinte equação diferencial:
Nxy,x + Ny,y = 0
(3.13)
Impondo o equilíbrio das forças na direção z, temos:
Ny dx β y − (Ny + Ny,y dy ) dx ( βy + β y,y dy )
+Nx dx βx − (Nx + Nx,x dx ) dy ( β x + β x,x dx )
−Q y dx + ( Q y + Q y,y dy ) dx − Q x dy + ( Q x + Q x,x dx ) dy
(3.14)
+Nxy dy β y − (Nxy + Nxy,x dx ) dy ( β y + β y,x dx )
+Nyx dx β x − (Nyx + Nyx,y dy ) dx ( β x + β x,y dx ) + pdxdy = 0
Reagrupando a eq. (3.14), desprezando os termos de ordem superior, e
considerando as eqs. (3.12) e (3.13), e que Nxy = Nyx, temos que:
−Nxβ x,x − Nxy (β y,x + β x,y ) − Ny β y,y + Q x,x + Q y,y = −p
(3.15)
Impondo o equilíbrio dos momentos com relação ao eixo x, temos:
My dx − (My + My,y dy ) dx + Mxy dy − (Mxy + Mxy,y dx ) dy + ( Q y + Q y,y dy ) dx.dy +
p dx dy
dy
=0
2
(3.16)
Desprezando termos de segunda ordem, a eq. (3.16) resulta em:
My,y + Mxy,x − Q y = 0
(3.17)
Por analogia, do equilíbrio dos momentos com relação ao eixo y, tem-se a eq.
(3.18):
36
Placas Retangulares
Mx,x + Myx,y − Q x = 0
(3.18)
Portanto as 5 equações de equilíbrio se resumem da forma:
Nx,x + Nxy,y = 0
Nxy,x + Ny,y = 0
Q x,x + Q y,y − Nxβx,x − Nxy (β y,x + β x,y ) − Ny β y,y = −p
(3.19)
Q y = My,y + Mxy,x
Q x = Mx,x + Mxy,y
Introduzindo a derivada da eq. (3.17) com relação à y e, a derivada da eq.
(3.18) com relação à x na eq. (3.19c), temos:
Mx,xx + 2Mxy,xy + My,yy − Nxβx,x − Nxy (β y,x + β x,y ) − Ny β y,y = −p
(3.20)
Introduzindo as equações cinemáticas e constitutivas dadas pelas eqs. (3.5),
(3.6) e (3.9) na eq. (3.20), temos:
D ( w,xxxx + 2w,xxyy + w,yyyy ) − (Nx w,xx + 2Nxy w,xy + Ny w,yy ) = p
(3.21)
Ou, de forma mais compacta através da introdução da função laplaciano:
D∇ 4 w − (Nx w,xx + 2Nxy w,xy + Ny w,yy ) = p
(3.22)
As eqs. (3.21) e (3.22) são equações análogas àquela obtida para colunas,
eq. (1.9b), EIw iv − Nw '' = 0 .
3.4 – Energia potencial estacionária
Aqui, as equações não lineares de equilíbrio são obtidas a partir do critério de
energia potencial estacionária, onde considera-se que a placa carregada está em
equilíbrio se sua energia potencial V é estacionária, e V é estacionária se o termo a
ser integrado na expressão para V satisfaz as equações de Euler nos cálculos das
variações.
Curso de Estabilidade Estrutural
37
A energia potencial total da placa sujeita à um carregamento lateral p(x,y) e à
uma carga nas suas extremidades é a soma da energia de deformação U e da
energia potencial das cargas aplicadas, Ω:
V = U+Ω
(3.23)
A expressão geral de energia de deformação de um material isotrópico
medida num sistemas de eixos ortogonais é colocada da forma:
U=
1
( σx εx + σy εy + σz εz + τxy γxy + τyz γyz + τzx γzx ) dx dy dz
2 ∫∫∫
(3.24)
Das hipóteses da Teoria de Kirchhoff, o cisalhamento transverso é nulo,
γyz = γzx = 0 , e a tensão normal à placa é nula, σz = 0 , logo:
U=
E
∫∫∫ εx + εy + 2νεx εy +
2 (1 + ν 2 )
2
2
1− ν 2
γ xy dx dy dz
2
(3.25)
Introduzindo a eq. (3.4) na eq. (3.25) e integrando com relação a z, tem-se
que a energia total de deformação pode ser colocada da forma:
U = UM + UF
(3.26)
onde UM é a energia de deformação de membrana e UF é a energia de deformação
de flexão dadas pelas expressões:
C 2
1− ν 2
2
γ xy dx dy
ε x + ε y + 2νε x ε y +
∫∫
2
2
D
UF = ∫∫ κ2x + κ2y + 2νκ x κ y + 2(1 − ν )κ 2xy dx dy
2
UM =
(
)
(3.27)
A eq. (3.27) pode ser obtida de uma outra forma se forem consideradas as
eqs. (3.1) e (3.9):
1
(Nx εx + Ny ε y + Nxy γ xy ) dx dy
2 ∫∫
1
UF = ∫∫ (Mx κ x + My κ y + Mxy κ xy ) dx dy
2
UM =
(3.28)
38
Placas Retangulares
A energia potencial das cargas aplicadas para um sistema conservativo é o
trabalho realizado pelas cargas a menos de um sinal. Conseqüentemente, a energia
potencial para uma carga transversal p é:
Ω = − ∫∫ p w dx dy
(3.28)
A expressão da energia potencial das cargas aplicadas nas extremidades da
placa depende da natureza das cargas. Como exemplo, considere uma placa sujeita
à uma carga compressiva Px, uniformemente distribuída ao longo das extremidades,
x = 0 e x = a, Fig. 3.4. Para esta carga, a energia potencial é escrita da forma:
Ω = Px [u(a) − u(0)]
(3.29)
Ou, colocando de uma outra forma, considerando que u(a) − u(0) = ∆u = ε x ∆L :
ba
Ω = Px
1
u,x dx dy
b ∫0 ∫0
(3.30)
y
Px
Px
b
x
a
h
Figura 3.4 – Placa sujeita à uma carga compressiva
x
Curso de Estabilidade Estrutural
39
Assim, para esse caso, para uma placa sujeita à uma carga lateral e uma
carga compressiva, a expressão de energia potencial Ω é:
1
Ω = ∫∫ Pxu,x − pw dx dy
b
(3.31)
De forma geral, a energia potencial total pode ser colocada da forma:
V = ∫∫ F dx dy
(3.32)
onde:
F=
C 2
1− ν 2
ε x + ε2y + 2νε x ε y +
γ xy
2
2
(
D 2
κ x + κ2y + 2νκ x κ y + 2(1 − ν )κ 2xy
2
1
+ Pxu,x − pw
b
+
)
(3.33)
No equilíbrio, a energia potencial deve ser estacionária, ou seja, δV deve ser
nulo. Dessa forma o termo F, eq. (3.33), deve satisfazer as equações de Euler no
cálculo das variações.
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂u ∂x ∂u,x ∂y ∂u,y
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂v ∂x ∂v,x ∂y ∂v,y
∂F ∂ ∂F
∂ ∂F
∂ 2 ∂F
∂ 2 ∂F
∂ 2 ∂F
−
−
+ 2
+
+ 2
=0
∂w ∂x ∂w,x ∂y ∂w,y ∂x ∂w,xx ∂x∂y ∂w,xy ∂y ∂w,yy
Da eq. (3.33), e considerando as eqs. (3.5) e (3.6), tem-se que:
(3.34)
40
Placas Retangulares
∂F
=0
∂u
P
∂F C
= ( 2ε x + 2νε y ) + x
b
∂u,x 2
∂F C
= (1 − ν ) γ xy
∂u,y 2
∂F
=0
∂v
∂F C
= (1 − ν ) γ xy
∂v,x 2
∂F C
= ( 2ε y + 2νε x )
∂v,y 2
∂F
= −p
∂w
∂F
C
= ( 2ε x + 2νε y ) w,x + (1 − ν ) γ xy w,y
∂w,x 2
(3.35)
∂F
C
= ( 2ε y + 2νε x ) w,y + (1 − ν ) γ xy w,x
∂w,y 2
∂F
D
= − ( 2κ x + 2νκ y )
∂w,xx
2
∂F
D
= − 4(1 − ν )κ xy
∂w,xy
2
D
∂F
= − ( 2κ y + 2νκ x )
2
∂w,yy
Introduzindo as eqs. (3.35) na eq. (3.34) temos:
(1 − ν ) γ = 0
C ( ε x + νε y ) +
( xy ),y
,x
2
(1 − ν )
C
γ xy ) + ( ε y + νε x ) = 0
(
,y
,y
2
−D ( κ x + νκ y ) + 2 (1 − ν ) ( κ xy ) + ( κ y + νκ x )
,xx
,xy
,yy
(3.36)
(1 − ν ) γ w
−C ( ε x + νε y ) w,x +
( xy ) ,y
2
,x
(1 − ν ) γ w = p
−C ( ε y + νε x ) w,y +
( xy ) ,x
2
,y
Introduzindo as eqs. (3.9) nas eqs. (3.36), tem-se:
Nx,x + Nxy,y = 0
Nxy,x + Ny,y = 0
(3.37)
D∇ 4 w − (Nx w,xx + 2Nxy w,xy + Ny w,yy ) = p
As equações de equilíbrio são não lineares pelo fato de haver acoplamento
entre os esforços de membrana Nx, Nxy, Ny e o deslocamento transversal w, dado
pela eq. (3.37c). As três incógnitas u, v e w podem ser determinados introduzindo as
Curso de Estabilidade Estrutural
41
relações cinemáticas dadas pelas eqs. (3.4), (3.5), (3.6), pelas relações
constitutivas, dadas pela eq. (3.9), o que resulta em:
(1 − ν )
1 2
1 2
u,x + 2 w,x + ν v,y + 2 w,y + 2 ( u,y + v,x + w,x w,y ),y = 0
,x
(1 − ν )
2
(u,y + v,x + w,x w,y ),x + v,y + 21 w,y2 + ν u,x + 21 w,x2
1
1
D∇ 4 w − C u,x + w,x2 + ν v,y + w,y2 w,xx
2
2
,y
=0
(3.38)
− (1 − ν ) C u,y + v,x + w,x w,y w,xy
1
1
−C v,y + w,y2 + ν u,x + w,x2 w,yy = p
2
2
As equações lineares de equilíbrio de placas são obtidas eliminando os
termos quadráticos nas expressões de deformação. Assim, as equações
correspondentes são:
Nx,x + Nxy,y = 0
Nxy,x + Ny,y = 0
(3.39)
D∇ 4 w = p
As equações não lineares (3.37) governam as trajetórias primária e
secundária, Fig. 3.6. A trajetória de equilíbrio determinada pela solução das
equações de equilíbrio apresentam a existência de um ponto de bifurcação e a
magnitude da carga crítica correspondente. Conseqüentemente, uma solução
separada da estabilidade não é necessária para a determinação da carga crítica. No
entanto, a trajetória de equilíbrio mostrada na Fig. 3.5 é baseada numa solução
numérica das equações não lineares de equilíbrio. A proposta da análise de
estabilidade é permitir a determinação da carga no ponto de bifurcação pela solução
das equações diferenciais lineares.
42
Placas Retangulares
Px
trajetória
primária
trajetória
secundária
-w
+w
Figura 3.5 – Curva de equilíbrio para placa sujeita à um carregamento compressivo
no plano
3.5 – Equações lineares de estabilidade
As equações diferenciais lineares de equilíbrio para a determinação da carga
no ponto de bifurcação para uma placa retangular submetida à uma carga
compressiva (a carga transversal p = 0) podem ser obtidas pela aplicação do critério
de equilíbrio adjacente, ou método de perturbação. As mesmas equações podem
também ser obtidas com o uso do critério da mínima energia potencial.
3.5.1 – Critério do equilíbrio adjacente
Para investigar a possibilidade de configurações com equilíbrio adjacente, é
dado aos deslocamentos, pequenos incrementos e examina-se duas configurações
adjacentes representadas pelos deslocamentos antes e depois do incremento.
Assim, considera-se os deslocamentos da forma:
u → uo + u1
v → v o + v1
(3.40)
w → w o + w1
onde u1, v1 e w1 são deslocamentos incrementais, arbitrários e pequenos e, uo, vo e
wo e, u, v e w são deslocamentos em duas configurações adjacentes em equilíbrio.
Introduzindo a eq. (3.40) na eq. (3.38), obtém-se termos lineares, quadráticos e
cúbicos em termos de uo, vo e wo e u1, v1 e w1. Nas novas equações, os termos em
uo, vo e wo sozinhos levam a zero pois estes deslocamentos são de uma
Curso de Estabilidade Estrutural
43
configuração de equilíbrio e, os termos quadráticos e cúbicos em u1, v1 e w1 podem
ser omitidos porque estes deslocamentos são incrementais. Assim, a equação
resultante é homogênea e linear em u1, v1 e w1 com coeficientes variáveis em uo, vo e
wo.
Os coeficientes de uo, vo e wo são no entanto, governados pela equação não
linear original. Por esta razão, é desejável que a faixa de aplicabilidade das
equações linearizadas sejam confinadas à uma configuração governada pelas
equações de equilíbrio lineares, eq. (3.39). Para o caso de uma placa sujeita à
esforços de compressão nas suas extremidades, Fig. 3.4, esta limitação implica em
w0 e suas derivadas iguais à zero.
Os incrementos nos deslocamentos, conforme as eqs. (3.40), correspondem à
mudanças nos esforços internos da forma:
Nx → Nxo + ∆Nx
Ny → N yo + ∆Ny
(3.41)
Nxy → Nxyo + ∆Nxy
onde os termos com índices 0 correspondem à uo, vo e wo e as variações ∆
correspondem aos incrementos u1, v1 e w1. Considera-se também que os esforços
Nx1, Ny1 e Nxy1 representam partes das variações ∆Nx, ∆Ny e ∆Nxy, respectivamente,
que são lineares em u1, v1 e w1. Por exemplo, das eqs. (3.5) e (3.9), tem-se que:
1
1
Nx = C u,x + w,x2 + ν v,y + w,y2
2
2
(3.42)
Desde que, w0 e suas derivadas são nulas, para o caso de uma placa sujeita
à uma carga compressiva, tem-se:
1 2
1 2
+ ν v o,y + v1,y + w1,y
Nx + ∆Nx = C uo,x + u1,x + w1,x
2
2
(3.43)
Então:
Nxo = C ( uo,x + νv o,y )
1 2
1 2
+ ν v1,y + w1,y
∆Nx = C u1,x + w1,x
2
2
Nx1 = C ( u1,x + νv1,y )
(3.44)
44
Placas Retangulares
Introduzindo as eqs. (3.41) nas eqs. (3.37) temos:
Nx1,x + Nxy1,y = 0
Nxy1,x + Ny1,y = 0
(3.45)
D∇ 4 w1 − (Nxo w1,xx + 2Nxyo w1,xy + Nyo w1,yy ) = 0
onde:
Nxo = C ( uo,x + νv o,y )
Nyo = C ( v o,y + νuo,x )
Nxyo = C
1− ν
(uo,y + vo,x )
2
Nx1 = C ( u1,x + νv1,y )
Ny1 = C ( v1,y + νu1,x )
Nxy1 = C
(3.46)
1− ν
(u1,y + v1,x )
2
As eqs. (3.45) são equações de estabilidade para uma placa sujeita à uma
carga compressiva, Fig. 3.4. Observa-se agora que a eq. (3.45c) está desacoplada
das eqs. (3.45a) e (3.45b).
A eq. (3.45c) é uma equação homogênea em w1 com coeficientes variáveis
em Nx0, Ny0 e Nxy0. Estes coeficientes são determinados pelas equações lineares
(3.39a) e (3.39b). A equação homogênea (3.45c) tem solução somente para valores
discretos de carga aplicada, onde para cada um desses valores existem duas
configurações de equilíbrio, uma na trajetória primária e outra na trajetória
secundária. As equações linearizadas não fornecem no entanto, informações sobre
a forma da trajetória secundária, mas as cargas obtidas no ponto de bifurcação,
dadas pela eq. (3.45c), que representam a perda de estabilidade.
3.5.2 – Critério da mínima energia potencial
Neste caso, as equações de estabilidade (3.45) são obtidas pela aplicação do
critério da energia potencial mínima. A forma flambada da placa está em uma
configuração de equilíbrio para todos os valores de carga aplicada. Para cargas
suficientemente pequenas o equilíbrio é estável. O equilíbrio deixa de ser estável
quando a expressão de energia potencial total V deixa de ser mínima. O critério de
perda de estabilidade é que o integrante na expressão do segundo variante de V
satisfaça as equações de Euller para o cálculo das variações.
Curso de Estabilidade Estrutural
45
A expressão de energia potencial total para o caso da placa bi-apoiada e
submetida à um carregamento compressivo nas extremidades, Fig. 3.4 é dada pelas
eqs. (3.32) e (3.33). Para obter a segunda variação, os deslocamentos são
considerados da forma:
u → uo + u1
v → v o + v1
(3.47)
w → w o + w1
onde u0, v0 e w0 é a configuração de equilíbrio na trajetória primária e u1, v1 e w1 é o
incremento. A segunda variação da energia potencial total é a soma de todos os
termos na expressão de energia potencial incremental que são quadráticos em u1, v1
e w1. A obtenção do segundo variacional pode ser feita termo a termo, como por
exemplo:
ε x = u,x +
1 2
w,x
2
(3.48)
E o quadrado da eq. (3.48) tem a forma:
ε2x = u2,x + u,x w,x2 +
1 4
w,x
4
(3.49)
Introduzindo a eq. (3.47) na eq. (3.49) e considerando na configuração de
equilíbrio w0 = 0 e, desprezando os termos de segunda ordem, temos
1 2 2
2
δ (ε x ) = u21,x + u0,x w1,x
2
(3.50)
Introduzindo equações similares à eq. (3.50) para as deformações εy e γxy na
segunda variação de energia de deformação de membrana, temos:
2
1 2
C
1− ν
δ Um = ∫∫ u21,x + v 21,y + 2νu1,x v1,y +
u1,y + v1,x ) +
(
2
2
2
2
2
( u0,x + νv 0,y ) w1,x
+ ( v 0,y + νu0,x ) w1,y
(3.51)
}
+ (1 − ν ) ( u0,y + v 0,x ) w1,x w1,y dxdy
Utilizando as equações constitutivas, a eq. (3.51) pode ser colocada da forma:
46
Placas Retangulares
2
1 2
C
1− ν
δ Um = ∫∫ u21,x + v 21,y + 2νu1,x v1,y +
u1,y + v1,x ) dxdy
(
2
2
2
1
2
2
dx dy
+ ∫∫ Nx0 w1,x
+ 2Nxy0 w1,x w1,y + Ny0 w1,y
2
(
)
(3.52)
E a segunda variação da energia de deformação de flexão é da forma:
1 2
D
δ Uf = ∫∫ w 21,xx + w 21,yy + 2νw1,xx w1,yy + 2 (1 − ν ) w 21,xy dx dy
2
2
(3.53)
Como a eq. (3.31) da energia potencial das cargas aplicadas não tem termos
quadráticos e nem de ordem superior em deslocamento, tem-se que δ2Ω = 0. Logo
δ2 V = δ2Um + δ2Uf
(3.54)
A expressão final da segunda variação pode ser colocada da forma:
δ2 V = C∫∫ F dx dy
(3.55)
onde:
2
1− ν
2
2
F = u1,x
+ v1,y
+ 2νu1,x v1,y +
u1,y + v1,x )
(
2
1 − ν2
2
Nx0 w 21,x + 2Nxy0 w1,x w1,y + Ny0 w1,y
Eh
h2
+ w 21,xx + w 21,yy + 2νw1,xx w1,yy + 2 (1 − ν ) w 21,xy
12
+
(
)
(3.56)
As equações que governam a perda de estabilidade são equações de Euller
para o integrante na expressão da segunda variação. Para o integrante colocado da
forma da eq. (3.56), as equações de Euller são da seguinte forma:
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂u1 ∂x ∂u1,x ∂y ∂u1,y
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂v1 ∂x ∂v1,x ∂y ∂v1,y
∂F
∂ ∂F
∂ ∂F
∂ 2 ∂F
∂2
∂F
∂ 2 ∂F
−
−
+ 2
+
+ 2
=0
∂w1 ∂x ∂w1,x ∂y ∂w1,y ∂x ∂w1,xx ∂x∂y ∂w1,xy ∂y ∂w1,yy
(3.57)
Curso de Estabilidade Estrutural
47
Introduzindo a eq. (3.56) na eq. (3.57) temos:
(u1,x + νv1,y ),x + 1 −2 ν (u1,y + v1,x ),y = 0
( v1,y + νu1,x ),y + 1 −2 ν (u1,y + v1,x ),x = 0
D∇ 4 w1 − (Nx0 w1,xx + 2Nxy0 w1,xy + Ny0 w1,yy ) = 0
(3.58)
Escrevendo a eq. (3.58) de forma compacta:
Nx1,x + Nxy1,y = 0
Nxy1,x + Ny1,y = 0
(3.59)
D∇ 4 w1 − (Nx0 w1,xx + 2Nxy0 w1,xy + Ny0 w1,yy ) = 0
onde Nx1, Ny1 e Nxy1 são definidos pela eq. (3.46). Percebe-se que as eqs. (3.59) são
as mesmas que as eqs. (3.45).
3.6 – Aplicações das equações de estabilidade
As eqs. (3.59) são aplicadas para todos os possíveis carregamentos no plano
como apresentado pela Fig. 3.4. Nos casos mais gerais, os coeficientes Nxo, Nyo e
Nxyo, são funções das coordenadas x e y. Por enquanto, as aplicações serão
somente para os casos onde estes coeficientes são constantes. Problemas com
coeficientes não constantes serão vistos posteriormente.
Para simplificar a notação, os índices 1 serão omitidos das quantidades
incrementais (u1, Mx1, etc.)
3.6.1 – Placa simplesmente apoiada nas quatro extremidades
Considere então uma placa simplesmente apoiada sujeita a um carregamento
compressivo uniformemente distribuído, como apresentado na Fig. 3.4. Usando as
eqs. (3.39a) e (3.39b), tem-se:
Nxo = −
Px
b
Nyo = Nxyo = 0
Introduzindo a eq. (3.60) na eq. (3.45c):
(3.60)
48
Placas Retangulares
D∇ 4 w +
Px
w,xx = 0
b
(3.61)
As condições de contorno são para este caso, w = Mx = 0 para x = 0 e x = a,
e w = My = 0 para y = 0 e y = b. Das eqs. (3.6) e (3.9) são Mx = −EI ( w,xx + νw,yy ) e
My = −EI ( w,yy + νw,xx ) . As condições de contorno podem então ser escritas:
w = w,xx = 0
para x = 0, a
w = w,yy = 0
para y = 0, b
(3.62)
A eq. (3.61) é uma equação com coeficiente constante com solução da forma:
w = C1 sen
mπx
nπy
sen
a
b
m,n = 1, 2,3,...
(3.63)
Introduzindo a eq. (3.63) na eq. (3.61) temos:
2
2
4
2
m π 4
mπ nπ nπ Px mπ
D
+ 2 a b + b − b a = 0
a
(3.64)
Para valores discretos de Px para a qual a eq. (3.61) tem solução não trivial
temos:
2
2
2
Px πa m n
= D +
b m a b
2
m = 1,2,3,…
(3.65)
A carga crítica correspondente ao menor valor de n, n = 1 para a > b. Logo:
2
2
2
Px πa m 1
=
D
+
b m a b
2
(3.66)
A eq. (3.66) pode ser expressa da forma:
Px = k c
onde:
π2D
b
(3.67)
Curso de Estabilidade Estrutural
a
mb
kc =
+
a mb
49
2
(3.68)
O coeficiente kc é a função da relação a/b e do comprimento de onda m. Para
uma relação a/b, o valor de m pode ser escolhido por tentativa para se obter o
menor valor de kc. A Fig. 3.6 apresenta valores de kc versus a relação a/b.
10
8
σcr =
π2D
kc
b2h
6
kc
4
2
0
0
1
2
a/b
3
4
5
Fig. 3.6 – Tensão crítica para uma placa simplesmente apoiada sujeita à uma
compressiva
Fig. 3.8 – Forma flambada de uma placa sujeita à uma carga compressiva (a/b = 2)
50
Placas Retangulares
A Fig. 3.9 mostra os modos de flambagem para n = 1 e m = 1, 2, 3 e a Tab.
3.1 mostra a comparação dos valores de Px obtidos analiticamente e numericamente
pelo método dos elementos finitos para a/b = 2.
m=2
m=1
m=3
Fig. 3.9 – Modo de flambagem para diferentes números de onda
Tabela 3.1 – Comparação analítica/numérica de Px
n=1
m
Analítica (kN)
Numérica (kN)
Erro (%)
2
57,844
56,851
-1,7
3
67,886
66,814
1,5
1
90,381
89,532
0,9
3.6.2 – Outras condições de contorno
Para um caso mais geral de condições de contorno, onde para y = 0 e y = b
as condições não são especificadas, a eq. (3.66) não é válida. A menor carga crítica
está associada ao caso de extremidades livres em y = 0 e y = b. Neste caso, a placa
pode ser considerada como uma coluna cuja rigidez em flexão EI pode ser
substituída por Db. Assim, da eq. (1.15):
Px = m2
π2Db
a2
(3.69)
A placa nestas condições é chamada de coluna larga, e o menor autovalor
para este caso é para m = 1.
Num caso mais geral, a equação diferencial e as condições de contorno para
x = 0 e x = a são satisfeitas por uma solução da forma:
Curso de Estabilidade Estrutural
w = f(y)s en
51
mπx
a
(3.70)
Introduzindo a equação (3.70) na eq. (3.61), chega-se a seguinte equação
diferencial ordinária:
2 2
4
2
d4 f
Px mπ
m π d f m π
−
2
+
−
a
f = 0
2
dy 4
dy
a Db a
(3.71)
A eq. (3.71) é uma equação homogênea com coeficientes constantes.
Conseqüentemente, sua solução é independente das condições em y = 0 e y = b. A
equação característica ou o polinômio característico tem a forma:
2
4
2
Px mπ
m π 2 m π
λ − 2
λ + a − Db a = 0
a
4
(3.72)
As raízes da eq. (3.72) são:
1/ 2
mπ mπ
Px
λ = ±
±
Db
a a
1/ 2
Como Px
Db
1/ 2
Px
Db
> mπ
a
(3.73)
= mπ
a
para colunas largas, eq. (3.69), e sabendo que
para quaisquer outras condições em y = 0 e y = b.
Conseqüentemente para outros casos, a eq. (3.73) pode ser escrita como,
λ = α, -α, iβ, -iβ , onde α e β são reais positivos e são da forma:
1/ 2
mπ mπ
Px
α=
+
Db
a a
1/ 2
mπ mπ
Px
β = −
+
Db
a a
(3.74)
Portanto a solução da equação diferencial ordinária (3.71) pode ser escrita da
forma:
52
Placas Retangulares
f = C1e−αy + C2eαy + C3cosβ y + C4 senβ y
(3.75)
As constantes C1, C2, C3 e C4 são constantes a serem determinadas impondose as condições de contorno em y = 0 e y = b.
Como exemplo de aplicação, considere uma placa simplesmente apoiada em
y = 0 e livre y = b. Para y = 0, as condições de contorno são:
w = w,yy = 0
(3.76)
Para y = b, as equações podem ser colocadas da forma:
w,yy + νw,xx = My = 0
(3.77)
w,yyy + ( 2 − ν ) w,xxy = Q y = Mxy = 0
Das eqs. (3.76) e (3.77) tem-se que C3 = 0 e C1 = - C2. Assim, a eq. (3.75) se
reduz em:
f = A senh αy + B sen β y
(3.78)
onde A e B são novas constantes. Introduzindo a eq. (3.78) nas eqs. (3.77), tem-se:
2
2
m2 π 2
m2 π 2
α − ν 2 senh αb A − β − ν 2 sen β b B = 0
a
a
2
2
m2 π 2
m2 π 2
α α − ( 2 − ν ) 2 cosh αb A − β β − ( 2 − ν ) 2 cos β b B = 0
a
a
(3.79)
A solução não trivial da eq. (3.79), impõe que o determinante da matriz dos
coeficientes de A e B seja nulo. Logo:
2
2
2
2
mπb
mπb
2
2
βb (αb) − ν
tanh αb = αb (αb) + ν a tan β b
a
onde das eqs. (3.74), temos que:
(3.80)
Curso de Estabilidade Estrutural
53
1/ 2
mπb 2 mπb P b
x
αb =
+ a
a
D
(3.81)
1/ 2
mπb mπb P b
x
βb = −
+ a
a
D
2
Para qualquer relação a/b, a carga crítica acontece para m = 1. A expressão
da carga crítica pode ser colocada da forma:
Px = k c
π2D
b
(3.82)
onde kc é um coeficiente adimensional de flambagem para carga compressiva. A
Fig. 3.9 na referência Brush and Almroth, apresenta os resultados de kc para
diferentes condições de contorno e diferentes relações a/b.
3.6.3 – Carregamento cisalhante
Para
uma
placa
sujeita
à
um
carregamento
cisalhante
distribuído
uniformemente, Fig. 3.10, a eq. (3.45c) é da forma:
D∇ 4 w − 2Nxy0 w,xy = 0
(3.83)
y
Nxy0
Nxy0
b
x
a
Figura 3.10 – Placa sujeita à um carregamento cisalhante
54
Placas Retangulares
A eq. (3.83), assim como a eq. (3.61) para um carregamento compressivo, é
uma equação com coeficientes constantes. No entanto, a solução da eq. (3.83) não
é da mesma forma como a eq. (3.63), isso por causa da ordem das derivadas, o que
impede de colocar em evidência termos como sen
cos
mπx
nπy
mπx
, sen
, cos
ou
a
b
a
nπy
. A solução deste problema é assumida ser da forma:
b
w = f(y)eikx / b
(3.84)
onde k é um parâmetro de comprimento de onda longitudinal e b é a largura da
placa. Introduzindo a eq. (3.84) na eq. (3.83) e rearranjando temos:
2
d2 f k 2
2Nxy0 ik df
=0
2 − f −
D b dy
dy b
(3.85)
onde a função f(y) é assumida ser da forma:
f(y) = Cλ eiky / b
(3.86)
onde Cλ é constante. A eq. (3.85) pode ser colocada sob a forma de um polinômio
de quarta ordem:
λ 4 + 2k 2λ 2 +
2Nxy0
D
kλ + k 4 = 0
(3.87)
Para cada valor específico de k, a eq. (3.87) tem quatro raízes, designadas
por λ1, λ2, λ3 e λ4. A solução da equação ordinária (3.85) pode então ser escrita
como:
f(y) = C1eiλ1 y / b + C2eiλ2 y / b + C3 eiλ3 y / b + C4 eiλ 4 y / b
(3.88)
Logo, a solução para w é da forma:
(
)
w = C1eiλ1 y / b + C2eiλ2 y / b + C3 eiλ3 y / b + C4 eiλ 4 y / b eikx / b
(3.89)
onde C1, C2, C3 e C4 são constantes determinadas em função das condições de
contorno e os valores críticos de Nxy0 podem ser determinados assim como em
Curso de Estabilidade Estrutural
55
§3.62. Para placas simplesmente apoiadas em y = 0 e y = b (w = w,yy = 0) e para
placas engastadas em y = 0 e y = b (w = w,y = 0), a carga crítica pode ser colocada
da forma:
Nxy0 = k s
π2D
b2
(3.90)
onde Ks é um coeficiente adimensional de flambagem ao cisalhamento. A tensão de
cisalhamento crítica, segundo as condições de contorno, pode ser conforme
representado da Fig. 3.11.
15
13
σcr =
engastada
π2D
ks
b2h
11
9
Ks
Simplemente apoiada
7
5
3
0
1
2
a/b
3
4
5
Figura 3.11 – Tensão crítica para uma placa simplesmente apoiada sujeita à uma
compressiva
3.6.4 – Carregamento combinado
Para uma placa sujeita à um carregamento compressivo nas direções x e y,
como apresentado na Fig. 3.12, os esforços podem ser colocados da forma:
Nx0 = −
Px
b
Nxy0 = 0
Ny0 = −
Py
a
(3.91)
56
Placas Retangulares
Py
y
Px
b
x
a
Figura 3.12 – Placa sujeita à um carregamento compressiva nas direções x e y
Introduzindo as eqs. (3.91) na eq. (3.45c):
D∇ 4 w +
Py
Px
w,xx + w,yy = 0
b
a
A
eq.
(3.92)
é
(3.92)
uma
equação
homogênea,
mas
com
coeficientes
independentes. Esta equação pode ser transformada num único parâmetro fazendo:
Py
a
=R
Px
b
(3.93)
onde R é uma constante adimensional. A equação resultante pode ser resolvida por
séries para valores específicos de R. Introduzindo a eq. (3.93) na eq. (3.92) tem-se:
D∇ 4 w +
Px
( w,xx + Rw,yy ) = 0
b
(3.94)
Para um caso de uma placa simplesmente apoiada onde as condições de
contorno são como colocadas pela eq. (3.62), a solução da eq. (3.94) é também da
forma da eq. (3.63). Introduzindo a eq. (3.68) na eq. (3.94) e rearranjando, a carga
crítica pode ser colocada da forma:
Curso de Estabilidade Estrutural
Px = k cc
57
π2D
b
(3.95)
onde
2
k cc
( mb / a )2 + n2
=
2
(mb / a ) + Rn2
(3.96)
Para valores de R e de relações a/b, a carga crítica pode ser obtida
escolhendo os valores de m e n que fornecem o menor valor de Kcc. Para uma
relação a/b = 1, o coeficiente Kcc pode ser obtida conforme apresentado na Tabela
3.2:
R
m
n
Kcc
1
1
1
2
0
1
1
4
-1
2
1
8,33
A Fig. 3.13 apresenta os modos de flambagem para diferentes números de
ondas e a Tabela 3.3 apresenta uma comparação dos valores de Px obtidos
analíticamente e numericamente pelo métodos dos elementos finitos para a/b = 1.
m=1en=1
m=2en=1
58
Placas Retangulares
m=2en=2
m=1en=2
Fig. 3.13 – Modos de flambagem para diferentes números de onda (R = 1)
Tab. 3.3 – Comparação analítica/numérica de Px (R = 1)
m
n
Analítica (kN)
Numérica (kN)
Erro (%)
1
1
28,922
29,551
2,2
2
1
72,305
73,375
1,5
1
2
72,305
74,538
3,1
2
2
115,688
119,900
3,6
Curso de Estabilidade Estrutural
59
4 – CASCAS CILÍNDRICAS CIRCULARES
4.1 – Introdução
Este capítulo trata exclusivamente da instabilidade de cascas cilíndricas por
causa da simplicidade das equações diferenciais.
4.2 – Equações diferenciais não lineares de equilíbrio - Donnell
Considere uma casca cilíndrica circular de comprimento L, de espessura h e
raio da superfície média a, com h << a. A superfície média do cilindro é referenciada
pelas coordenadas cilíndricas x e θ e as distâncias da superfície neutra são medidas
pela coordenada z. Os componentes do deslocamento são u, v e w nas direções x,
θ e z, respectivamente. O cilindro é considerado estar sujeito à um carregamento
compressivo nas extremidades e a uma carga distribuída lateralmente, p(x,θ).
Sob um elemento infinitesimal de dimensões dx, adθ, e espessura h atuam
esforços de membrana Nx, Nθ e Nxθ, esforços de flexão Mx, Mθ e Mxθ e esforços
transversais Qx, Qθ e p. Os eixos x e y são colocados no plano médio da placa e o
eixo z é medido a partir do plano médio, Fig. 4.1.
z
adθ
dx
p
Qx
Mxθ
x
Qθ
Mθx
Mθ
Mx
Nx
h
θ
Nxθ
Nθx
Nθ
Figura 4.1 – Esforços internos atuantes sobre um elemento de casca
Os esforços internos são forças e momentos por unidade de comprimento e,
estão relacionados com as tensões internas pelas equações:
60
Cascas Cilíndricas Circulares
h/ 2
z
Nx = ∫ σ x 1 + dz
a
−h / 2
h/2
∫
Nθ =
h/2
Nxθ
z
= ∫ τxθ 1 + dz
a
−h / 2
h/ 2
∫
Nθx =
τθx dz
−h / 2
h/ 2
z
Q x = ∫ τxz 1 + dz
a
−h / 2
σθdz
−h / 2
h/2
Qθ =
∫
τθz dz
h/ 2
Mx = a
z
∫ σx 1 + a z dz
−h / 2
h/ 2
Mθ = a
∫
z
∫ τxθ 1 + a z dz
−h / 2
σθ z dz
−h / 2
h/2
Mxθ = a
(4.1)
−h / 2
h/2
Mθx = a
∫
τθx z dz
−h / 2
As tensões σ x , τxy , etc., são tensões em um ponto qualquer ao longo da
espessura da placa, diferente de σx, τxy, etc., que são tensões na superfície média
(z=0). Para uma casca suficientemente fina, a relação z/a é desprezível comparado
à unidade.
4.2.1 – Soma das forças e dos momentos
As equações não lineares de equilíbrio são obtidas impondo o equilíbrio das
forças e dos momentos em um elemento em uma configuração levemente
deformada, Fig. 4.2. As rotações βx e βθ representam o ângulo entre os eixos
coordenados e as tangentes à superfície média no vértice superior da placa. Como
as forças e os momentos variam ao longo do elemento, a notação Nx+ é usada para
considerar (Nx+Nx,xdx). Como os ângulos βx e βy são pequenos, pode-se considerar
que sen βx = βx e sen βθ = βθ e, cos βx = cos βθ = 1. Os termos quadráticos
representando interações não lineares entre as forças cisalhantes transversas e as
rotações são assumidas nulas.
Curso de Estabilidade Estrutural
61
z
Nx
Nxθ
Nθx
Nθ
θ
p
Qx
Qθ
Qθ+
βθ
Nθ+
Qx+
x
Nθx+
βx
Nxθ+
Nx+
z
Mxθ
Mx
Mθx
Mθ
θ
Mxθ+
x
βx
Mθx+
Mθ+
βθ
Mx+
Figura 4.2 – Esforços internos em um elemento de casca cilíndrica numa
configuração deformada
Impondo o equilíbrio das forças na direção x, temos:
−Nx adθ + (Nx + Nx,x dx ) adθ − Nθx dx + (Nθx + Nθx,θdθ ) dx = 0
(4.2)
Simplificando, a eq. (4.2) resulta em:
aNx,x + Nθx,θ = 0
(4.3)
62
Cascas Cilíndricas Circulares
Impondo o equilíbrio das forças na direção θ, temos:
−Nθdx + (Nθ + Nθ,θdθ ) dx − Nxθadθ + (Nxθ + Nxθ,x dx ) adθ + Qθ dxdθ = 0
(4.4)
Do equilíbrio das forças na direção θ, tem-se a seguinte equação diferencial:
aNxθ,x + Nθ,θ + Qθ = 0
(4.5)
O termo relativo ao cortante Qθ na eq. (4.5) pode ser desprezado quando a
espessura da casca cilíndrica é muito pequena.
Impondo o equilíbrio das forças na direção z, temos:
Nθdx βθ − (Nθ + Nθ,θ dθ ) dx ( βθ + βθ,θ dθ ) − Nθ dxdθ
+Nx adθ β x − (Nx + Nx,x dx ) adθ ( β x + β x,x dx )
−Qθdx + ( Qθ + Qθ,θ dθ ) dx − Q x adθ + ( Q x + Q x,x dx ) adθ
(4.6)
+Nxθadθ βθ − (Nxθ + Nxθ,x dx ) adθ ( βθ + βθ,x dx )
+Nθx dx β x − (Nθx + Nθx,θdθ ) dx ( β x + β x,θdθ ) + pdxadθ = 0
Reagrupando a eq. (4.6), desprezando os termos de ordem superior e
considerando as eqs. (4.3) e (4.5), temos que:
aQ x,x + Qθ,θ − aNxβ x,x − Nθ − aNxθβθ,x − Nθxβ x,θ − Nθ βθ,θ = −pa
(4.7)
Impondo o equilíbrio dos momentos com relação ao eixo x, temos:
Mθdx − (Mθ + Mθ,θ dθ ) dx + Mxθadθ − (Mxθ + Mxθ,x dx ) adθ + Qθ dxadθ
+pdxadθ
adθ
=0
2
(4.8)
Desprezando termos de segunda ordem, a eq. (4.8) resulta em:
aQθ = Mθ,θ + aMxθ,x
(4.9)
Por analogia, do equilíbrio dos momentos com relação a θ é:
aQ x = aMx,x + Mθx,θ
(4.10)
Curso de Estabilidade Estrutural
63
Introduzindo as derivadas das eqs. (4.9) e (4.10) na eq. (4.7), as 3 equações
de equilíbrio se resumem em:
aNx,x + Nθx,θ = 0
aNxθ,x + Nθ,θ = 0
a2Mx,xx + aMxθ,xθ + aMθx,xθ + Mθ,θθ − aNθ − a2Nxβ x,x
(4.11)
−a2Nxθβθ,x − aNθxβ x,θ − aNθβθ,θ = −pa2
Considerando que Nxθ = Nθx e Mxθ = Mθx, as eqs. (4.11) reduzem em:
aNx,x + Nxθ,θ = 0
aNxθ,x + Nθ,θ = 0
(4.12)
a2Mx,xx + 2aMxθ,xθ + Mθ,θθ − aNθ − a2Nxβx,x − aNxθ ( aβθ,x + β x,θ ) − aNθβθ,θ = −pa2
As relações constitutivas para o caso de cascas cilíndricas finas (z/a << 1)
são da seguinte forma:
Nx = C ( ε x + νε θ )
Mx = D ( κ x + νκθ )
Nθ = C ( εθ + νε x )
Mθ = D ( κ θ + νκ x )
Nxθ = C
1− ν
γ xθ
2
(4.13)
Mxθ = D (1 − ν ) κ xθ
onde as constantes C e D são dadas pelas eqs. (3.10) e εx, εy e γxz são deformações
da superfície média e são dadas da forma:
1
ε x = u,x + β2x
β x = − w,x
κ x = β x,x
2
β
v +w 1 2
w
εθ = ,θ
+ βθ
βθ = − ,θ
κ θ = θ,θ
a
2
a
a
u
1β
γ xθ = ,θ + v,x + βxβθ
κ xθ = x,θ + βθ,x
2 a
a
(4.14)
Comparando as expressões de deformações e curvaturas para cascas
cilíndricas com as expressões de deformações e curvaturas para placas tem-se:
64
Cascas Cilíndricas Circulares
1
ε x = u,x + β2x
2
1
εθ = v,y + βθ2
2
β x = − w,x
βθ = − w,θ
γ xθ = ( u,θ + v,x ) + β xβθ
κ xθ =
κ x = β x,x
κ θ = βθ,θ
(4.15)
1
(βx,θ + βθ,x )
2
Introduzindo as equações constitutivas, eq. (4.13), e as equações
cinemáticas, eq. (4.14), nas eq. (4.12), as equações diferenciais de equilíbrio se
resumem em:
aNx,x + Nθx,θ = 0
aNxθ,x + Nθ,θ = 0
(4.16)
1
2
1
D∇ 4 w + Nθ − Nx w,xx + Nxθ w,xθ + 2 Nθ w,θθ = p
a
a
a
onde o divergente em coordenadas cilíndricas é da forma:
∇ 4 w = w,xxxx +
2
1
w,xxθθ + 4 w,θθθθ
2
a
a
(4.17)
As eqs. (4.16) são equações de equilíbrio não lineares, pois relacionam os
esforços de membrana, Nx, Nxθ e Nθ, com o deslocamento transversal w.
4.2.2 – Energia potencial estacionária
Aqui, as equações não lineares de equilíbrio são obtidas a partir do critério de
energia potencial estacionária, onde considera-se que a placa carregada está em
equilíbrio se sua energia potencial V é estacionária, e V é estacionária se o termo a
ser integrado na expressão para V satisfaz as equações de Euler nos cálculos das
variações.
A energia potencial total da placa sujeita à um carregamento lateral p(x,y) e à
uma carga nas sua extremidades é a soma das energias de deformação U e energia
potencial das cargas aplicadas, Ω:
V = U+Ω
(4.18)
Curso de Estabilidade Estrutural
65
A expressão de energia total de deformação pode ser colocada da forma que
para placas, onde UM é a energia de deformação de membrana e UF é a energia de
deformação de flexão dadas pelas expressões:
U = UM + UF
aC 2
1− ν 2
ε x + ε2θ + 2νε x εθ +
γ xθ dxdθ
∫∫
2
2
aD
UF =
κ2x + κ2θ + 2νκ x κ θ + 2(1 − ν )κ 2xθ dxdθ
∫∫
2
UM =
(
(4.19)
)
A eq. (4.19) pode ser obtida de uma outra forma se forem consideradas as
eqs. (4.13) e (4.14):
a
(Nx ε x + Nθεθ + Nxθ γ xθ ) dx dθ
2 ∫∫
a
UF = ∫∫ (Mx κ x + Mθ κθ + Mxθ κ xθ ) dx dθ
2
UM =
(4.20)
A energia potencial das cargas aplicadas para um sistema conservativo é o
trabalho realizado pelas cargas a menos de um sinal. Conseqüentemente, a energia
potencial para uma carga transversal p é:
Ω = −a ∫∫ p w dx dθ
(4.21)
De uma forma mais compacta, a energia potencial total pode ser colocada da
forma:
V = ∫∫ F dx dθ
(4.22)
No equilíbrio, a energia potencial deve ser estacionária, ou seja, δV deve ser
nulo. Dessa forma o termo F, eq. (4.22), deve satisfazer as equações de Euler no
cálculo das variações.
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂u ∂x ∂u,x ∂θ ∂u,θ
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂v ∂x ∂v,x ∂θ ∂v,θ
∂F ∂ ∂F
∂ ∂F
∂ 2 ∂F
∂ 2 ∂F
∂ 2 ∂F
−
−
+
+
+
=0
∂w ∂x ∂w,x ∂θ ∂w,θ ∂x 2 ∂w,xx ∂x∂θ ∂w,xθ ∂θ2 ∂w,θθ
(4.23)
66
Cascas Cilíndricas Circulares
Aplicando as equações de Euler, eq. (4.23), nas eqs. (4.19) e (4.21) e
considerando as eqs. (4.14) temos que:
∂F
=0
∂u
∂F aC
=
( 2ε x + 2νεθ )
2
∂u,x
∂F
=0
∂v
∂F aC
(1 − ν ) γ xθ
=
2
∂v,x
∂F aC (1 − ν )
=
γ xθ
2 a
∂u,θ
∂F aC
1
=
( 2εθ + 2νε x )
2
a
∂v,θ
w
∂F
aC
=
2 ( ε x + νε θ ) w,x + (1 − ν ) γ xθ ,θ
∂w,x
2
a
w
w
∂F
aC
=
2 ( εθ + νε x ) 2,θ + (1 − ν ) γ xθ ,x
∂w,θ
2
a
a
∂F
aC
1
= −pa +
2 ( εθ + νε x )
∂w
2
a
∂F
aD
2 ( κ x + νκ θ )
=−
∂w,xx
2
(4.24)
∂F
aD
1
=−
4(1 − ν )κ xθ
2
a
∂w,xθ
aD
1
∂F
2 ( κθ + νκ x ) 2
=−
2
∂w,θθ
a
Introduzindo as eqs. (4.24) na eq. (4.23) temos:
(1 − ν ) γ = 0
C a ( ε x + νεθ ),x +
( xθ ),θ
2
(1 − ν )
C a
( γ xθ ),x + ( εθ + νε x ),θ = 0
2
2
1
1
−Da ( κ x + νκθ ),xx + (1 − ν )( κ xθ ),xθ + 2 ( κθ + νκ x ),θθ + Ca ( ε θ + νε x )
a
a
a
(4.25)
(1 − ν ) γ w
−Ca ( ε x + νεθ ) w,x +
( xθ ) ,θ
2
,x
(1 − ν ) γ w = pa
−Ca ( εθ + νε x ) w,θ +
( xθ ) ,x
2
,θ
Introduzindo as eqs. (4.13) nas eqs. (4.25), tem-se:
aNx,x + Nxθ,θ = 0
aNxθ,x + Nθ,θ = 0
2
1
2
1
1
− Mx,xx + Mxθ,xθ + 2 Mθ,θθ + Nθ − Nx w,xx + Nxθ w,xθ + 2 Nθ w,θθ = p
a
a
a
a
a
E, de forma compacta
(4.26)
Curso de Estabilidade Estrutural
67
aNx,x + Nxθ,θ = 0
aNxθ,x + Nθ,θ = 0
(4.27)
1
2
1
D∇ 4 w + Nθ − Nx w,xx + Nxθ w,xθ + 2 Nθ w,θθ = p
a
a
a
As equações de equilíbrio são não lineares pelo fato de haver acoplamento
entre os esforços de membrana Nx, Nxy, Ny e o deslocamento transversal w, dado
pela eq. (4.27c). As três incógnitas u, v e w podem ser determinadas introduzindo as
relações cinemáticas, dadas pelas eqs. (4.14), e constitutiva, dada pela eq. (4.13).
As equações lineares de equilíbrio de cascas cilíndricas são obtidas
eliminando os termos quadráticos nas expressões de deformação. Assim, as
equações correspondentes são:
aNx,x + Nxθ,θ = 0
aNxθ,x + Nθ,θ = 0
(4.28)
1
D∇ 4 w + Nθ = p
a
onde as deformações são agora da forma:
ε x = u,x
εθ =
v,θ + w
γ xθ =
a
u,θ
a
(4.29)
+ v,x
As equações lineares de equilíbrio para cascas cilíndricas, eq. (4.28), formam
um conjunto de três equações acopladas com quatro variáveis, Nx, Nθ, Nxθ e w. As
três equações com três variáveis são obtidas introduzindo as equações constitutivas,
(4.13), e equações cinemáticas (4.29), resultando em:
1− ν
1+ ν
u,θθ +
av,xθ + νaw,x = 0
2
2
1+ ν
1− ν 2
au,xθ +
a v,xx + v,θθ + w,θ = 0
2
2
1
D∇ 4 w + 2 C ( v,θ + w + νau,x ) = p
a
a2u,xx +
(4.30)
68
Cascas Cilíndricas Circulares
Para o caso de uma casca cilíndrica, assumida ser infinitamente longa,
submetida à uma carga compressiva, as trajetórias primária e secundária são como
apresentadas na Fig. 4.3. A trajetória primária representa uma configuração circular
cilíndrica e a trajetória secundária representa uma configuração não cilíndrica. As
trajetórias de equilíbrio apresentam a existência de um ponto de bifurcação e a
magnitude da carga crítica correspondente.
P
trajetória
primária
trajetória
secundária
deslocamento axial u
Figura 4.3 – Curva de equilíbrio para casca cilíndrica à uma carga axial compressiva
4.3 – Forma de Donnell para as equações lineares de estabilidade
As equações diferenciais de equilíbrio lineares para a determinação da carga
do ponto de bifurcação para uma casca cilíndrica sujeita à uma carga compressiva
na sua extremidade e uma pressão lateral podem ser obtidas pela aplicação do
critério de equilíbrio adjacente, ou método de perturbação. As mesmas equações
podem também ser obtidas com o uso do critério da mínima energia potencial.
4.3.1 – Critério do equilíbrio adjacente
Para investigar a possibilidade de configurações com equilíbrio adjacente, é
dado aos deslocamentos pequenos incrementos e examina-se duas configurações
adjacentes representadas pelos deslocamentos antes e depois do incremento.
Assim, considera os deslocamentos da forma:
Curso de Estabilidade Estrutural
69
u → uo + u1
v → v o + v1
(4.31)
w → w o + w1
onde u1, v1 e w1 são deslocamentos incrementais, arbitrários e pequenos e, uo, vo e
wo e, u, v e w são deslocamentos em duas configurações adjacentes em equilíbrio.
Os incrementos nos deslocamentos, conforme as eqs. (4.31), correspondem à
mudanças nos esforços internos da forma:
Nx → Nxo + ∆Nx
Nθ → Nθo + ∆Nθ
(4.32)
Nxθ → Nxθo + ∆Nxθ
onde os termos com índices 0 correspondem à uo, vo e wo e as variações ∆Nx, ∆Nθ e
∆Nxθ correspondem aos incrementos u1, v1 e w1. Considera-se também que os
esforços Nx1, Nθ1 e Nxθ1 representam partes das variações ∆Nx, ∆Nθ e ∆Nxθ,
respectivamente, e que são lineares em u1, v1 e w1. Por exemplo, das eqs. (4.13) e
(4.14), tem-se que:
v,θ + w 1 w,2θ
1 2
Nx = C u,x + w,x + ν
+
a
2
2 a2
(4.33)
Então, considerando a eq. (4.31):
1 2
1 2
+ w o,x w1,x + w1,x
Nx + ∆Nx = C uo,x + u1,x + w o,x
2
2
2
v + w o v1,θ + w1 1 w o,
w o,θ w1,θ 1 w1,2θ
θ
+ν o,θ
+
+
+
+
2
2
a
a
2
a
2
a
a
(4.34)
Reagrupando a eq. (4.34):
Nxo
2
v o,θ + w o 1 w o,
1 2
θ
= C uo,x + w o,x + ν
+
2
2
a
2
a
1 2 v1,θ + w1 w o,θ w1,θ
∆Nx = C u1,x + w o,x w1,x + w1,x
+
+ν
2
a
a
1
+
2 a
w1,2θ
2
(4.35)
70
Cascas Cilíndricas Circulares
E:
v + w1 w o,θ w1,θ
Nx1 = C ( u1,x + w o,x w1,x ) +ν 1,θ
+
a
a
(4.36)
Introduzindo as eqs. (4.31) e (4.32) nas eqs. (4.26), todos os termos em uo, vo
e wo sozinhos e em p desaparecem porque uo, vo e wo é uma configuração de
equilíbrio, isto é, é solução das equações de equilíbrio. Além disso, termos
quadráticos e de ordem superior em u1, v1 e w1 podem ser desprezados pois estes
são pequenos. Logo:
aNx1,x + Nxθ1,θ = 0
aNxθ1,x + Nθ1,θ = 0
1
D∇ 4 w1 + Nθ1 − (Nxo w1,xx + w o,xxNx1 )
a
2
1
+ (Nxθo w1,xθ + w o,xθNxθ1 ) + 2 (Nθo w1,θθ + w o,θθNθ1 ) = 0
a
a
(4.37)
onde:
Nxo = C ( ε xo + νε θo )
Nx1 = C ( ε x1 + νεθ1 )
Nθo = C ( εθo + νε xo )
Nθ1 = C ( ε θ1 + νε x1 )
Nxθo = C
1− ν
γ xθo
2
Nxθ1 = C
(4.38)
1− ν
γ xθ1
2
e:
ε xo = uo,x +
1 2
w o,x
2
ε x1 = u1,x + w o,x w1,x
2
v + w o 1 w o,θ
εθo = o,θ
+
a
2 a2
u w w
γ xθo = v o,x + o,θ + o,x o,θ
a
a
v1,θ + w1 w o,θ w1,θ
+
a
a2
u w w
w w
γ xθ1 = v1,x + 1,θ + o,x 1,θ + o,θ 1,x
a
a
a
εθ1 =
(4.39)
Em análise de estabilidade, os deslocamentos (uo, vo e wo) são comumente
chamados de deformações de pré-flambagem e os deslocamentos (u1, v1 e w1) são
chamados de modo de flambagem. As eqs. (4.37), (4.38) e (4.39) diferem das
correspondentes equações para placas, eqs. (3.45) e (3.46), pois incluem as
rotações de pré-flambagem. Infelizmente, a deformação de cascas antes de perder a
Curso de Estabilidade Estrutural
71
estabilidade não tem rotação livre. A presença destas rotações de pré-flambagem
nas equações de estabilidade introduzem uma complicação substancial. Felizmente,
a influência das rotações de pré-flambagem são pequenas e podem ser
desprezadas.
A omissão dos termos contendo wo,x e wo,θ das eqs. (4.37) fornecem as
equações de estabilidade que são da forma:
aNx1,x + Nxθ1,θ = 0
aNxθ1,x + Nθ1,θ = 0
(4.40)
1
2
1
D∇ 4 w1 + Nθ1 − Nxo w1,xx + Nxθo w1,xθ + 2 Nθo w1,θθ = 0
a
a
a
A omissão também desses termos na expressões de deformação fornecem:
ε xo = uo,x
εθo =
ε x1 = u1,x
v o,θ + w o
a
γ xθo = v o,x +
uo,θ
a
εθ1 =
v1,θ + w1
a
γ xθ1 = v1,x +
(4.41)
u1,θ
a
As eqs. (4.40) são equações homogêneas nas variáveis u1, v1 e w1.
4.3.2 – Critério da mínima energia potencial
Neste caso, as equações de estabilidade (4.40) são obtidas pela aplicação do
critério da energia potencial mínima.
A expressão de energia potencial total para o caso de uma casca cilíndrica
sujeita à uma pressão lateral é dada pela soma das eqs. (4.19) e (4.21). Para obter a
segunda variação da energia potencial total, os deslocamentos são considerados da
forma:
u → uo + u1
v → v o + v1
(4.42)
w → w o + w1
Introduzindo as eqs. (4.42) na expressão da energia potencial total e retendo
todos os termos quadráticos em u1, v1 e w1 e considerando que a energia potencial
72
Cascas Cilíndricas Circulares
Ω da pressão lateral é uma função linear dos componentes dos deslocamentos,
então δ2Ω = 0. Assim, a expressão da segunda variação da energia potencial total é:
1 2
C
1− ν 2
δ V = a ∫∫ ε2x1 + ε2θ1 + 2νε x1ε θ1 +
γ xθ1 dxdθ
2
2
2
+
w1,2θ
w1,θ
a
2
N
w
+
N
+
2N
w
dxdθ
xo 1,x
xθo 1,x
θo
2 ∫∫
a
a2
(4.43)
2
w1,2θθ
w1,θθ
w1,x
D 2
+ a ∫∫ w1,xx + 4 + 2νw1,xx 2 + 2 (1 − ν ) 2 θ dxdθ
2
a
a
a
Como anteriormente, a influência das rotações de pré-flambagem, wo,x e wo,θ
é desprezível.
Aplicando as equações de Euller no integrante da eq. (4.43) e introduzindo as
equações constitutivas, eq. (4.38), e as equações cinemáticas, eq. (4.39), temos:
1− ν
1+ ν
u1,θθ +
av1,xθ + νaw1,x = 0
2
2
1+ ν
1− ν 2
au1,xθ +
a v1,xx + v1,θθ + w1,θ = 0
2
2
1
2
1
D∇ 4 w1 + 2 C ( v1,θ + w1 + νau1,x ) − Nxo w1,xx + Nxθo w1,xθ + 2 Nθo w1,θθ = 0
a
a
a
a2u1,xx +
(4.44)
As eq. (4.44) são equações acopladas nas variáveis u1, v1 e w1. Como
apresentado por Donnell, estas equações podem ser parcialmente desacopladas
fazendo o seguinte:
ν
1
∇ 4u1 = − w1,xxx + 3 w1,xθθ
a
a
2+ν
1
∇ 4 v1 = − 2 w1,xxθ − 4 w1,θθθ
a
a
2
1− ν
2
1
D∇8 w1 + 2 Cw1,xxxx − ∇ 4 Nxo w1,xx + Nxθo w1,xθ + 2 Nθo w1,θθ = 0
a
a
a
(
(4.45)
)
onde ∇8 w1 = ∇ 4 ∇ 4 w1 .
As eqs. (4.45) são chamadas de equações de estabilidade de Donnell numa
forma desacoplada. A eq. (4.45c) é uma equação linear homogênea em w1 somente,
com variáveis em Nxo, Nθo e Nxθo. Por causa da influência dos termos de pré-
Curso de Estabilidade Estrutural
73
flambagem wox e woθ terem sido desprezadas, os coeficientes Nxo, Nθo e Nxθo são
governados pela equação linear de equilíbrio, eq. (4.28).
4.4 – Aplicações das equações de estabilidade
Neste tópico, as equações de estabilidade de Donnell são aplicadas. Para
simplificar a notação, os índices 1 serão omitidos das quantidades incrementais (u1,
Mx1, etc.)
4.4.1 – Pressão lateral uniforme
Para este primeiro exemplo, considere uma casca cilíndrica apoiada nas suas
extremidades e sujeita à uma pressão uniforme lateral pe. Sob este carregamento, a
deformação de pré-flambagem da casca (uo, vo e wo) é axisimétrica, Fig. 4.4. A
pressão crítica pcr é definida como a menor pressão na qual a forma axisimétrica
perde a estabilidade.
Se o cilindro está livre para estender horizontalmente quando a pressão
lateral é aplicada, Nxo = 0. Além disso, Nxθo = 0 na ausência de carregamento
torcional. Introduzindo estes valores na eq. (4.45) a expressão se simplifica:
1 − ν2
1
D∇ w + 2 Cw,xxxx − 2 ∇ 4 (Nθo w,θθ ) = 0
a
a
8
(4.46)
p
wo
wo
L
2a
(a)
(b)
Fig. 4.4 – Cilindro sujeito à uma pressão uniforme
A eq. (4.46) é uma equação linear com um coeficiente variável Nθo(x). Por
74
Cascas Cilíndricas Circulares
causa da deformação de pré-flambagem acarretar numa flexão, o coeficiente é
governado pelas equações lineares de flexão, eq. (4.28). Modificando estas
equações para simetria axial, tem-se:
N'x = 0
(4.47)
1
Dw iv + Nθ = −pe
a
Das equações constitutivas, eq. (4.13), e das equações de deformações, eqs.
(
w
w
(4.29), sabe-se que, Nx = C u,x + ν e Nθ = C + νu,x . Mas, C = Eh / 1 − ν 2
a
a
)
e
da eq. (4.47a), Nx = 0. Assim:
Nθ = Eh
w
a
(4.48)
Introduzindo a eq. (4.48) na eq. (4.47), tem-se que:
Dw iv +
Ehw
= −pe
a2
(4.49)
A eq. (4.49) é conhecida como a equação de equilíbrio para deformações
axisimétricas de uma casca cilíndrica. A solução da equação apresenta que a função
w(x) inclui um fator de decaimento rápido, portanto, a flexão da parede da casca
está confinada a uma região estreita próxima das extremidades do cilindro, como
mostra a Fig. 4.4a. Desprezando este efeito localizado da flexão, a forma do
deslocamento pode ser considerada como apresentado na Fig. 4.4b. Então, o
coeficiente Nθo é governado pelas equações de membrana, fazendo D = 0 na eq.
(4.28), em vez da equação linear de momento. Assim, da equação linear de
membrana, eq. (4.28), tem-se:
Nθo = −pea
(4.50)
Introduzindo a eq. (4.50) na eq. (4.46), tem-se a equação de estabilidade para
uma casca cilíndrica sujeita à uma pressão externa lateral uniforme:
1− ν2
1
D∇ w + 2 Cw,xxxx + pe∇ 4 w,θθ = 0
a
a
8
(4.51)
Curso de Estabilidade Estrutural
75
As condições de contorno nas extremidades do cilindro são periódicas em θ e
são:
w = w,xx = 0
para x = 0, L
(4.52)
A eq. (4.51) é uma equação homogênea com coeficiente constante e sua
solução tem a forma:
w = C1 sen
m
x sen nθ
a
(4.53)
onde C1 é uma constante, m = mπa
L
, e m,n = 1, 2, 3, ..., satisfazem a equação
diferencial e as condições de contorno. Introduzindo a eq. (4.53) na eq. (4.51) e
rearranjando, temos:
D
(
1
m2 + n 2
8
a
)
4
+
1 − ν 2 m4 1 n2
C 4 − p e 4 m 2 + n2
2
a a
a
a
(
)
2
=0
(4.54)
Isolando a pressão lateral pe, tem-se:
(m
p a=
e
2
+ n2
n
2
)
2
D
m4
+
a 2 n2 m 2 + n2
(
)
(1− ν ) C
2
2
(4.55)
Os autovalores correspondem a cada par de valores de m e n. O menor
autovalor em cada caso é visto corresponder a m = 1 (isto é, m = πa ), (ver Tab.
L
4.1). Assim:
2
( πa / L )2 + n2
4
πa / L )
(
D
+
pe a =
1 − ν2 C
2
2
2
2
n
a
n2 ( πa / L ) + n2
(
)
(4.56)
Introduzindo as constantes de rigidez C e D, e rearrajando:
2
2
2
2
4
πa / L )
(
pea ( πa / L ) + n ( h / a )
=
+
2
2
Eh
n2
12 1 − ν 2
n2 ( πa / L ) + n2
(
)
(4.57)
76
Cascas Cilíndricas Circulares
Tabela 4.1 – Modos de flambagem para diferentes números de ondas longitudinais
m=1
m=2
m=3
Para valores particulares de L/a e a/h, o valor de n correspondente ao menor
autovalor é determinado por tentativa. Para L/a próximo do infinito, a eq. (4.57) se
reduz a:
p e = n2
D
a3
(4.58)
O valor de n no qual a pressão pe é crítica é obtido pela minimização analítica
da eq. (4.57). Os resultados desse procedimento de minimização podem ser obtidos
introduzindo os seguintes parâmetros:
p=
L2a
pe
π2D
n=
nL
πa
Z=
L2
1 − ν2
ah
(
)
1/ 2
(4.59)
ondep é um parâmetro de pressão adimensional,n é um parâmetro de
comprimento de onda cincunferencial e Z é uma variável geométrica cilindrica
conhecida como parâmetro de Batdorf.
Introduzindo estes parâmetros na eq. (4.57) e rearranjando, temos:
(1 + n )
p=
2
n
2
2
+
1
(
n2 1 + n2
)
2
12 2
Z
π4
(4.60)
Curso de Estabilidade Estrutural
77
A minimização dep em relação an na eq. (4.60) fornecepcr com função de
um simples parâmetro Z, em vez de dois parâmetros L/a e a/h. Os resultados desse
procedimento estão apresentados na Fig. 4.5. Para um cilindro relativamente longo
(grandes valores de L ou Z), o procedimento de minimização analítica é
excessivamente impreciso, porque n é pequeno e não pode ser tratado
satisfatoriamente como uma variável contínua.
Para um cilindro submetido à uma pressão lateral externa, a tensão
circunferencial σθ está relacionada com a pressão pela equação σθ = pa/h. Então a
tensão crítica é σcr = pcra/h.
10000
pcr =
1000
π2D
p
L2a
2
L
5a
a < h
p 100
10
1
1
10
100
L
Z=
1− ν2
ah
2
(
1000
10000
)
1/ 2
Figura 4.5 – Valores críticos de pressão para cilindros sujeitos à uma pressão
externa lateral
4.4.2 – Compressão axial
Considere como um segundo exemplo, um cilindro simplesmente apoiado nas
suas extremidades e sujeito à uma carga axial compressiva uniformemente
78
Cascas Cilíndricas Circulares
distribuída P. Sob essas condições, o cilindro se encurta e aumenta seu diâmetro,
com exceção das suas extremidades. Como no exemplo anterior, a deformação
inicial é axisimétrica, Figura 4.6, e a carga crítica Pcr é a menor carga na qual o
equilíbrio deixa de ser estável numa forma axisimétrica.
O deslocamento wo é novamente função de x e, é assumido por simplicidade
que a deformação de pré-flambagem pode ser determinada com suficiente precisão
pelas equações lineares de membrana. Assim, a forma axisimétrica da Figura 4.6a.
é substituída pela forma da Figura 4.6b.
Nxo = −
P
2πa
wo
wo
L
2a
(a)
(b)
Fig. 4.6 – Cilindro sujeito à uma carga compressiva uniforme
Das equações de equilíbrio de membrana da forma não flambada cilíndrica,
tem-se que Nxo = – P/2πa e Nxθo = Nθo = 0. Introduzindo estes valores na eq. (4.46c)
a expressão simplifica:
D∇8 w +
1 − ν2
P 4
Cw,xxxx +
∇ w,xx = 0
2
2πa
a
(4.61)
A eq. (4.61) é uma equação linear com um coeficiente constante. As
condições de contorno e a forma da solução, eq. (4.53), é a mesma que no caso
anterior. Introduzindo a eq. (4.53) na eq. (4.61) e rearranjando, temos:
(
1
D 8 m 2 + n2
a
)
4
1 − ν 2 m4
P m2 2
+ 2 C 4 −
m + n2
6
2πa a
a
a
(
)
2
=0
(4.62)
Curso de Estabilidade Estrutural
79
Isolando a carga P, tem-se:
(
m2 + n2
P
=
2πa
m2
)
2
D
m2
+
a2
m2 + n2
(
)
(1− ν ) C
2
2
(4.63)
Para cilindros com comprimento intermediário (L/a não muito grande e não
muito pequeno), o menor autovalor pode ser obtido pela minimização analítica de P
(
com relação a quantidade m2 + n2
)
2
/ m2 na eq. (4.63). Introduzindo as expressões
de C e D e diferenciando a eq. (4.63), a carga P é mínima para:
(m
2
+ n2
m
)
2
(
)
1/ 2
= 2 3 1 − ν 2
2
a
h
(4.64)
Introduzindo a relação (4.64) na eq. (4.63) e rearranjando, tem-se:
Pcr
Eh2 / a
=
2πa 3 1 − ν 2 1/ 2
(
)
(4.65)
Considerando que a tensão normal é σcr = Pcr/2πah, da eq. (4.65) obtêm-se
que a expressão da tensão crítica é da forma:
σcr =
Eh / a
(
)
1/ 2
3 1 − ν 2
(4.66)
Para um valor de ν = 0,3, a eq. (4.66) se torna:
σcr = 0,605 Eh / a
(4.67)
Pelo fato de m e n serem inteiros e positivos e m = mπa , é impossível
L
satisfazer a eq. (4.64) para cilindros curtos (L/a pequeno). Tal dificuldade acontece
para valores de Z menores que 2,85. Em tais casos, a eq. (4.63) pode ser utilizada
onde a carga crítica pode ser determinada por tentativa e erro. Os cálculos são
simplificados se a eq. (4.63) é expressa em termos de Z e n . Os resultados desses
cálculos são apresentados na Fig. 4.7, onde:
80
Cascas Cilíndricas Circulares
L2h
k a = 2 σcr
πD
(4.68)
Para Z > 2,85, os valores de σcr dados pela Fig. 4.7 e pela eq. (4.66) são os
mesmos.
Quando o raio do cilindro se aproxima do infinito e Z se aproxima de zero, o
coeficiente ka na Fig. 4.7 se aproxima de 1. Então:
Nxocr = σcr h =
π2D
L2
(4.69)
A eq. (4.69) é a equação da carga crítica para uma “coluna larga”, uma placa
simplesmente apoiada nas extremidades carregadas e livre na extremidade não
carregada (ver eq. (2.3)).
10000
σcr =
1000
π2D
ka
L2h
k a 100
10
1
1
10
100
L
Z=
1− ν2
ah
2
(
1000
10000
)
1/ 2
Figura 4.7 – Valores críticos de pressão para cilindros sujeitos à uma carga
axial compressiva
Curso de Estabilidade Estrutural
81
4.4.3 – Torção
Para uma casca cilíndrica sujeita à um momento torçor, a eq. (4.45c) é
simplificada para (Nx = Nθ = 0) :
1− ν2
2
D∇ w + 2 Cw,xxxx − ∇ 4 (Nxθo w,xθ ) = 0
a
a
8
(4.70)
É assumido, por simplicidade, que a análise de membrana é adequada para a
deformação de pré-flambagem. Então, Nxθo é uma constante, e a eq. (4.70) pode ser
reescrita da forma:
D∇8 w +
1− ν2
2
Cw1,xxxx − Nxθo∇ 4 w,xθ = 0
2
a
a
(4.71)
Assim como a expressão de uma placa sujeita à uma carga cisalhante, a eq.
(4.71) tem uma derivada ímpar com relação as coordenadas x e θ ( ∇ 4 w,xθ ) e duas
derivadas pares com relação a coordenada x. Conseqüentemente, a eq. (4.53) não é
solução da eq. (4.71). A solução da eq. (4.71) para a torção é da forma:
m
w = C1 sen x − nθ
a
(4.72)
onde C1 é uma constante e m = mπa . A eq. (4.72) satisfaz a eq. (4.71) assim como
L
satisfaz as condições de periodicidade da coordenada circunferencial, mas não
satisfaz
as
condições
de
contorno
comumente
usadas
para
cilindros.
Conseqüentemente, esta expressão pode ser utilizada somente para cilindros longos
cujas condições de contorno têm pouca influência no valor da carga crítica.
Para tais cilindros, a introdução da eq. (4.72) na eq. (4.71) e rearranjando
fornece:
(
1
D∇ 8 m2 + n2
a
8
)
4
1 − ν 2 m4 2
mn
+ 2 C 4 − Nxθo 5 m2 + n2
a
a
a
a
Isolando a carga Nxθo, temos:
(
)
2
=0
(4.73)
82
Nxθo
Cascas Cilíndricas Circulares
(m
=
2
+ n2
)
2
(
2mn
Para
D
m3
+
a 2 2 m 2 + n2
cilindros
longos,
)
(1− ν ) C
2
2
n
a
casca
(4.74)
cilíndrica
flamba
em
duas
ondas
circunferenciais, isto é, o menor valor de Nxθo corresponde a n = 2, (ver Tab. 4.2).
Introduzindo este valor na eq. (4.74) temos:
Nxθo
(m
=
2
+4
)
2
4m
D
m3
+
a 2 4 m2 + 4
(
)
(1− ν ) C
2
2
(4.75)
Tabela 4.2 – Modos de flambagem para diferentes números de onda circunferenciais
n=1
n=2
n=3
Para cilindros suficiente longos, ( mπa / L ) << 4 , a eq. (4.75) se transforma
2
em:
Nxθo
(
)
3
2
4D m 1 − ν C
=
+
64
ma2
(4.76)
O valor de m para o qual Nxθo é mínimo pode ser determinado pela
minimização analítica de Nxθo na eq. (4.76) com relação a m . Introduzindo as
expressões de C e D e diferenciando a eq. (4.76), obtêm-se que Nxθo é mínimo para
4
m =
(
64
9 1 − ν2
)
h
a
2
Introduzindo a eq. (4.77) na eq. (4.76) e rearranjando temos:
(4.77)
Curso de Estabilidade Estrutural
0,272E h
τcr =
3/4
a
1 − ν2
(
83
3/2
(4.78)
)
onde τcr = Nxθo / h .
Para cilindros curtos, a tensão crítica pode ser obtida em termos de um
coeficiente de tensão crítica kt definido pela relação (ver Fig. 4.8):
L2h
k t = 2 τ cr
πD
(4.79)
10000
σcr =
1000
a
Z < 10
h
2
πD
kt
L2h
2
k t 100
Engastada nas
extremidades
10
1
Simplesmente apoiada
nas extremidades
1
10
100
L
Z=
1− ν2
ah
2
(
1000
10000
)
1/ 2
Figura 4.8 – Valores de tensão de cisalhamento crítico para cilindros em torção
4.4.4 – Carregamento combinado
Como um exemplo de carregamento combinado, considere uma casca
cilíndrica simplesmente apoiada nas extremidades submetida à uma carga axial
compressiva P e uma carga lateral externa pe. Se uma análise de membrana é
assumida ser adequada para deformação axisimétrica, na eq. (4.45c), temos:
84
Cascas Cilíndricas Circulares
1− ν2
P
1
D∇ w + 2 Cw,xxxx + ∇ 4 (
w,xx + pe w,θθ ) = 0
2πa
a
a
8
(4.80)
A eq. (4.80) pode ser alterada pela introdução de uma constante adimensional
R:
P
≡ Rpea
2πa
(4.81)
Introduzindo a eq. (4.81) na eq. (4.80) temos:
1 − ν2
1
D∇ w + 2 Cw,xxxx + pe∇ 4 ( w,θθ + aRw ,xx ) = 0
a
a
8
(4.82)
Introduzindo a função de deflexão dada pela eq. (4.53) na eq. (4.82) e
rearranjando, temos:
D
(
1
m 2 + n2
8
a
)
4
+
1 n2
1 − ν 2 m4
m2 2
C
p
aR
m + n2
−
+
e
2
4
4
6
a
a
a
a a
(
)
2
=0
(4.83)
Isolando a carga pe, tem-se:
(m
p a=
e
2
) (D / a ) + m (1− ν ) C
(m + n ) (n + Rm )
+ n2
2
4
2
2
2
4
2
2
2
(4.84)
Para cada relação de R, há um correspondente autovalor para cada par de
valores m e n. O mínimo autovalor pode ser determinado por tentativa e erro.
Um caso de interesse particular é para R = ½, onde P = πa2pe e a cilindro está
sujeito a uma pressão uniforme pe nas laterais e nas extremidades. Este tipo de
carregamento é chamado de pressão hidrostática. Os resultados da eq. (4.84) são
apresentados na Fig. 4.9 em função do parâmetro Z.
Curso de Estabilidade Estrutural
85
10000
2
pcr =
1000
L
5a
a < h
π2D
p
L2a
p 100
Pressão axial
10
Pressão lateral
Pressão hidrostática
1
1
10
100
L
Z=
1− ν2
ah
2
(
1000
10000
)
1/ 2
Figura 4.9 – Comparação de valores críticos – pressão hidrostática, lateral e axial
86
Cascas Genéricas
5 – CASCAS GENÉRICAS
5.1 – Introdução
Uma casca é definida como um corpo onde uma dimensão é muito menor
comparado às outras duas. Este fato permite reduzir um problema tridimensional em
um problema bidimensional, e dessa forma, o deslocamento de qualquer ponto no
interior da casca pode ser expresso em termos das componentes do deslocamento
da superfície neutra.
5.2 – Equações diferenciais de equilíbrio não lineares
Considere uma casca fina de forma arbitrária feita de material elástico,
homogêneo e isotrópico. A superfície de referência é a superfície média, os eixos x e
y são chamados coordenadas linhas-de-curvatura, os eixos X, Y e Z são eixos
cartesianos e os raios de curvatura são Rx e Ry, Figura 5.1. As distâncias ao longo
das linhas de curvatura são dadas pelas relações:
dS x = A dx
dS y = B dy
(5.1)
onde A e B são chamados de coeficientes de Lamé dados por:
1/ 2
∂X 2 ∂Y 2 ∂Z 2
A =
+
+
∂x ∂x ∂x
1/ 2
∂X 2 ∂Y 2 ∂Z 2
B =
+
+
∂y ∂y ∂y
(5.2)
A espessura da casca é h e a distância de um ponto genérico até a superfície
neutra é z.
A teoria para cascas elásticas finas é válida para deflexões de qualquer
magnitude, contanto que as deformações permaneçam pequenas. A teoria é
baseada na expressão de energia de deformação obtida em termos das seguintes
hipóteses (Koiter):
1 – A casca é fina, h/R<<1, onde R é o menor raio de curvatura da superfície
média indeformada,
Curso de Estabilidade Estrutural
87
2 – As deformações são pequenas comparadas com a unidade e a energia de
deformação do corpo é dada pela função quadrática das componentes de
deformação para um sólido isotrópico elástico,
3 – O estado de tensão é aproximadamente plano, isto é, o efeito do
cisalhamento transverso e da tensão normal à superfície média pode ser
desprezado na expressão de energia de deformação.
Z
z
x
y
Y
X
Figura 5.1 – Sistema de coordenadas global (X, Y e Z) e local (x, y e z)
Assumindo as hipóteses acima, a energia de deformação para uma casca
elástica fina é da forma:
U = UM + UF
C 2
1− ν 2
ε x + ε2y + 2νε x ε y +
γ xy AB dx dy
∫∫
2
2
D
UF = ∫∫ κ2x + κ2y + 2νκ x κ y + 2 (1 − ν ) κ 2xy AB dx dy
2
UM =
(
(5.3)
)
onde εx, εy e γxy são deformações de membrana da superfície média, e κx, κy e κxy
são curvaturas e torção da superfície média.
A energia potencial total V de uma casca carregada é a soma das energias de
deformação U e da energia potencial Ω das cargas aplicadas:
V = U+Ω
(5.4)
Para obter a expressão da energia potencial Ω, considere px, py e pz,
componentes em x, y e z da carga distribuída sobre a superfície da casca e u, v e w
88
Cascas Genéricas
as componentes de deslocamento de um ponto da superfície média. Então, a
expressão de energia potencial pode ser colocada da forma:
Ω = − ∫∫ ( p xu + p y v + pz w ) AB dx dy
(5.5)
As equações de equilíbrio e estabilidade desenvolvidas até aqui são
baseadas em relações cinemáticas não lineares de uma forma relativamente
simples:
1
ε x = e xx + β2x
2
1
ε y = e yy + β2y
2
1
γ yx = e xy + βxβ y
2
κ x = χ xx
κ y = χ yy
(5.6)
κ xy = χ xy
onde eij, βi e χij são funções lineares das componentes do deslocamento da
superfície média, u, v, e w. As relações cinemáticas expressas pela eqs. (5.6) são
tais que: (1) eij são de mesma ordem de grandeza que ε2, onde ε é muito pequeno
comparado à unidade, (2) as rotações βi e βj são de mesma ordem de grandeza que
ε, e (3) as rotações relativas à normal à superfície média é desprezível comparada
às outras duas. Para o caso de cascas genéricas, as equações cinemáticas dadas
por Sanders podem ser escritas da seguinte forma:
e xx =
e xy =
u,x
A
+
v,x
+
A,y v
AB
u,y
−
+
w
Rx
β x,x
2χ xy =
+
A
β y,x
A
AB
β x,y
B
B,xu
AB
+
w
Ry
AB
βy = −
A,yβ y
+
B
+
B,x v + A,yu
A
B
w
u
βx = − ,x +
A Rx
χ xx =
v,y
e yy =
χ yy =
−
w,y
B
β y,y
B
+
+
v
Ry
(5.7)
B,xβx
AB
A,yβx + B,xβ y
AB
Experiência com exemplos numéricos, mostram no entanto que os termos
contendo os deslocamentos u e v nas rotações βx e βy são desprezíveis. Dessa
forma, tem-se que esta rotações podem ser colocadas da forma:
Curso de Estabilidade Estrutural
βx = −
w,x
A
βy = −
w,y
B
89
(5.8)
Introduzindo as eqs. (5.8) nas expressões de curvatura nas eqs. (5.7) e
simplificando, temos:
χ xx = −
χ yy = −
χ xy = −
w,xx
2
A
w,yy
B2
w,xy
AB
+
+
+
A,x w x
3
A
B,y w,y
B3
A,y w,x
A 2B
−
−
+
A,y w,y
AB2
B,x w,x
A 2B
B,x w,y
(5.9)
AB2
As equações simplificadas (5.7), (5.8) e (5.9) são chamadas relações
cinemáticas de Donnell-Mushtari-Vlasov (DMV) para cascas quase-rasas.
As equações diferenciais de equilíbrio para cascas genéricas são obtidas
introduzindo as relações cinemáticas dadas pelas eqs. (5.7), (5.8) e (5.9) na
expressão de energia potencial total, eq. (5.4), e aplicando o princípio da energia
potencial estacionária. As equações de Euler resultantes do cálculo das variações
são:
(BNx ),x + ( ANxy ),y − B,xNy + A,yNxy = − ABpx
( ANy ),y + (BNxy ),x − A,yNx + B,xNxy = − ABpy
A,y
B,x
1
1
A (BMx ),x − B Mx + B ( AMy ),y − A My
,x
,y
,x
,y
(5.10)
N
Ny
A,y
B
Mxy + ,x Mxy − AB x +
+2 Mxy,xy +
R x R y
,y
A
,x B
− (BNxβx + BNxyβy ) + ( ANyβy + ANxyβ x ) = − ABpz
,x
,y
onde os esforços internos são da forma:
Nx = C ( ε x + νε y )
Mx = D ( κ x + νκ y )
Ny = C ( ε y + νε x )
My = D ( κ y + νκ x )
Nxy = C
1− ν
γ xy
2
Mxy = D (1 − ν ) κ xy
(5.11)
90
Cascas Genéricas
As eqs. (5.10) são equações diferenciais de equilíbrio não lineares para
cascas elásticas finas de forma genérica. As equações diferenciais de equilíbrio
lineares são obtidas omitindo os termos quadráticos ou de ordem superior em u, v e
w.
A partir das eqs. (5.10) pode-se chegar nas equações de equilíbrio de placa,
eqs. (3.37), fazendo A = B = 1 e 1/Rx = 1/Ry = 0 e nas equações de equilíbrio de uma
casca cilíndrica, eqs. (4.16), fazendo A = 1, B = Ry = a e 1/Rx = 0.
5.3 – Equações lineares de estabilidade
Neste seção, o critério de energia potencial mínima é usado para obter a
expressão de segunda variação da energia potencial de uma casca genérica em
termos dos parâmetros lineares de deslocamento eij, βi e χij nas eqs. (5.7). As
equações de perda de estabilidade são obtidas pela introdução das relações
cinemáticas de DMV.
5.3.1 – Critério da energia potencial mínima
Para investigar a possibilidade de configurações com equilíbrio adjacente, é
dado aos deslocamentos pequenos incrementos e examina-se duas configurações
adjacentes representadas pelos deslocamentos antes e depois do incremento.
Assim, considera os deslocamentos da forma:
u → uo + u1
v → v o + v1
(5.12)
w → w o + w1
onde u1, v1 e w1 são deslocamentos incrementais, arbitrários e pequenos e, uo, vo e
wo e, u, v e w são deslocamentos em duas configurações adjacentes em equilíbrio.
Em termos dos parâmetros lineares de deslocamento, exx é substituído por exx0 +
exx1, etc., e os termos quadráticos com relação ao índice 1 são omitidos. A
expressão de energia potencial das forças externas é função linear dos
deslocamentos u, v e w, logo, ela não tem nenhuma contribuição na sua segunda
variação, δ2Ω = 0 . Conseqüentemente, δ2 V = δ2U . Ou:
Curso de Estabilidade Estrutural
91
δ2 V = δ2UM + δ2UF
(5.13)
Assim, as expressões da segunda variação das energias de deformação de
membrana e de flexão são da forma:
2
2
1 2
C
1− ν
2
δ UM = ∫∫ ( δε x ) + ( δε y ) + 2ν ( δε x ) ( δε y ) +
δγ xy )
(
2!
2
2
(
)
(
+ ( ε xo + νε yo ) δ2ε x + ( ε yo + νε xo ) δ2ε y
+
)
)}
1− ν
γ xyo δ2 γ xy AB dx dy
2
(
`
(5.14)
2
1 2
D
2
δ UF = ∫∫ ( δκ x ) + ( δκ y ) + 2ν ( δκ x ) ( δκ y )
2!
2
2
+ 2 (1 − ν ) ( δκ xy ) AB dx dy
onde, das eqs. (5.7), temos que as variações são da forma:
δε x = e xx1 + β xoβ x1
δ2ε x = β2x1
2
β2y1
δε y = e yy1 + β yoβ y1
δ εy =
δγ yx = e xy1 + βyoβ x1 + β xoβ y1
δ2 γ yx = 2β x1β y1
δκ x = χ xx1
δκ y = χ yy1
(5.15)
δκ xy = χ xy1
Das eqs. (6.11), tem-se que:
Nxo = C ( ε xo + νε yo )
Nyo = C ( ε yo + νε xo )
Nxyo = C
(5.16)
1− ν
γ xyo
2
Introduzindo as eqs. (5.14) e (5.15) na eq. (5.13), a expressão da segunda
variação da energia potencial total tem a expressão:
92
Cascas Genéricas
2
1 2
C
2
δ V = ∫∫ ( e xx1 + β xoβx1 ) + ( e yy1 + β yoβ y1 )
2!
2
+ 2ν ( e xx1 + β xoβ x1 ) ( e yy1 + β yoβ y1 )
+
}
2
1− ν
e xy1 + β xoβ y1 + β yoβ x1 ) AB dx dy
(
2
1
+ ∫∫ Nxoβ2x1 + Nyoβ2y1 + 2Nxyoβ x1β y1 AB dx dy
2
D
+ ∫∫ χ2xx1 + χ2yy1 + 2νχ xx1χ yy1 + 2 (1 − ν ) χ 2xy1 AB dx dy
2
(
(5.17)
)
A eq. (5.17) é a expressão genérica da segunda variação da energia potencial
total para uma casca fina (rasa ou não rasa) sujeita à um carregamento. Para uma
casca quase rasa, os parâmetros de deslocamento incrementais de DMV são
aproximados por:
e xx1 =
u1,x A,y v1 w1
+
+
A
AB
R1
w1,x
A
A,yβy1
β
χ xx1 = x1,x +
A
AB
β x1 = −
(5.18)
Os outros parâmetros de deslocamentos são obtidos por analogia.
As equações diferenciais de equilíbrio não lineares na sua forma mais
genérica, onde as rotações de pré-flambagem, βxo e βyo, não são desprezadas, são
então colocadas como:
(BNx1 ),x + ( ANxy1 ),y − B,xNy1 + A,yNxy1=0
( ANy1 ),y + (BNxy1 ),x − A,yNx1 + B,xNxy1=0
1
A
1
B
(BMx1 ),x − ,y Mx1 + ( AMy1 ) − ,x My1
,y
,x B
,y A
A
,x
,y B
N
Ny1
A,y
B
+2 Mxy1,xy +
Mxy1 + ,x Mxy1 − AB x1 +
R x R y
,y
A
,x B
− (BNxoβ x1 + BNxyoβ y1 ) + (Bβ xoNx1 + Bβ yoNxy1 )
,x
,x
+ ( ANyoβy1 + ANxyoβ x1 ) + ( Aβ yoNy1 + Aβ xoNxy1 ) = 0
,y
,y
(5.19)
Curso de Estabilidade Estrutural
93
onde os esforços internos incrementais são da forma:
Nx1 = C ( e xx1 + β xoβ x1 ) +ν ( e yy1 + β yoβ y1 )
Ny1 = C ( e yy1 + β yoβ y1 ) +ν ( e xx1 + β xoβ x1 )
1− ν
( exy1 + βxoβy1 + βyoβx1 )
2
β
A,yβy1 βy1,y B,xβ x1
Mx1 = D x1,x +
+
+ν
AB B
AB
A
Nxy1 = C
(5.20)
β y1,y B,xβx1 βx1,x A,yβ y1
My1 = D
+
+
+ν
B
AB
A
AB
1 − ν β y1,x β x1,y A,yβ x + B,xβ y
+
−
Mxy1 = D
2 A
B
AB
e os parâmetros de deslocamento incrementais são da forma:
e xx1 =
e yy1 =
u1,x
A
v1,y
B
+
+
A,y v1
AB
+
w1
Rx
B,xu1 w1
+
AB R y
v1,x u1,y B,x v1 + A,yu1
+
−
A
B
AB
w
u
β x = − 1,x + 1
A
Rx
e xy1 =
β y1 = −
w1,y
B
+
(5.21)
v1
Ry
Introduzindo as eqs. (5.20) e (5.21) nas eqs. (5.19), tem-se três equações
homogêneas lineares em u, v e w com coeficientes variáveis Nxo, Nyo, Nxyo, βxo e βyo.
Estes coeficientes são determinados pelas equações não lineares de equilíbrio
dadas pelas eqs. ( 5.10)
5.3.2 – Critério do equilíbrio adjacente
As equações diferenciais de equilíbrio lineares (5.19) podem ser obtidas de
uma forma alternativa, a partir das equações de equilíbrio não lineares, eq. (5.10),
94
Cascas Genéricas
aplicando o critério de equilíbrio adjacente, na qual os deslocamentos são colocados
da forma:
u → uo + u1
v → v o + v1
(5.22)
w → w o + w1
onde uo, vo e wo representa a configuração em equilíbrio que está sendo
considerada, u, v e w é uma configuração em equilíbrio adjacente correspondente ao
mesmo valor da carga aplicada na configuração uo, vo e wo, e u1, v1 e w1 são
deslocamentos arbitrários e pequenos. Além disso, os incrementos nos esforços
internos devido aos incrementos nos deslocamentos são da forma:
Nx → Nxo + ∆Nx
Ny → Nyo + ∆Ny
Nxy → Nxyo + ∆Nxy
(5.23)
βx → β xo + β x1
βy → β yo + β y1
onde ∆Nx, ∆Ny, ∆Nxy, βx1 e βy1 são incrementos devido a u1, v1 e w1. Os esforços Nx1,
Ny1, Nxy1 representam porções de ∆Nx, ∆Ny, ∆Nxy. Nenhum incremento é dado à
carga aplicada (px, py, pz). Introduzindo as eqs. (5.22) e (5.23) nas eqs. (5.10) e
omitindo os termos quadráticos e de ordem superior em u1, v1 e w1, a equações
resultantes são também da forma das eqs. (5.19) e (5.20).
5.4 – Cascas de revolução
Uma casca de revolução é formada pela rotação de uma curva plana em
torno de um eixo, Fig. 5.2. Planos normais ao eixo de revolução interceptam a casca
em curvas chamadas de paralelos, e planos que contêm o eixo de revolução e
interceptam a casca são chamadas de meridianos. Pontos da superfície da casca
são referenciados com coordenadas φ e θ, onde φ é o ângulo entre o eixo de
revolução e a normal a superfície da casca, e θ é a coordenada circunferencial.
Curso de Estabilidade Estrutural
95
paralelo
φ
meridiano
θ
Figura 5.2 – Casca de revolução
Os raios de curvatura com relação à φ e θ são respectivamente rφ e rθ. E, o
raio de um paralelo numa posição φ é relacionado da forma (ver Fig. 5.3):
r = rθ sen φ
(5.24)
w
u
φ
r
rθ
Figura 5.3 – Meridiano da casca de revolução
As dimensões de um elemento infinitesimal da casca de revolução são:
96
Cascas Genéricas
dsφ = rφ dφ
(5.25)
dsθ = r dθ
Assim, se φ e θ são tomados corresponder a x e y respectivamente, os
coeficientes de Lamé são:
A = rφ
B=r
R x = rφ
R y = rθ
(5.26)
Além disso, e da Fig. 5.3:
dr = dsφ cos φ
(5.27)
As eqs. (5.25) e (5.27) são também relacionadas da forma:
dr
= rφ cos φ
dφ
(5.28)
As variáveis rφ, rθ e r caracterizam a forma da superfície média da casca
indeformada e são função somente de φ. Os deslocamentos u, v e w são
componentes de deslocamento de um ponto da superfície média da casca nas
direções φ, θ e normal à casca, respectivamente.
5.4.1 – Equações de estabilidade com rotações de pré-flambagem retidas
Substituindo as eqs. (5.26) nas eqs. (5.19) e (5.20), tem-se:
(rNφ1 ),φ + rφNφθ1,θ − rφNθ1 cos φ=0
(rNyθ1 ),φ + rφNθ1,θ + rφNφθ1 cos φ=0
1
rφ
( rMφ1 ),φ + 2 Mφθ1,φθ + Mφθ1,θ cos φ
r
rφ
,φ
rφ
+ Mθ1,θθ − (Mθ1 cos φ ),φ − ( rNφ1 + rφNθ1 s enφ )
r
− ( rNφoβφ1 + rNφθoβθ1 ) + ( rβφ1Nφ1 + rβφoNφθ1 )
,φ
,φ
+rφ (Nθoβθ1 + Nφθoβφ1 ) + rφ ( βθoNθ1 + βφoNφθ1 ) = 0
,θ
,θ
`
(5.29)
Curso de Estabilidade Estrutural
97
onde as forças e momentos internos e as variáveis de deslocamento são dadas por:
Nφ1 = C ( eφφ1 + βφoβφ1 ) + ν ( eθθ1 + βθoβθ1 )
Nθ1 = C ( eθθ1 + βθoβθ1 ) + ν ( eφφ1 + βφoβφ1 )
1− ν
( eφθ1 + βφoβθ1 + βθoβφ1 )
2
βφ1,φ ν
+ ( βθ1,θ + βφ1 cos φ )
Mφ1 = D
r
rφ
Nφθ1 = C
1
ν
Mθ1 = D ( βθ1,θ + βφ1 cos φ ) + ( βφ1,φ )
rφ
r
βφ1,φ
1 − ν r βθ1
+
Mφθ1 = D
2 rφ r ,φ
r
eφφ1 =
1
(u1,φ + w1 )
rφ
eθθ1 =
u
r v1
+ 1,θ
rφ r ,φ
r
1
( v1,θ + u1 cos φ + w1 sen φ )
r
w1,φ
w
βφ1 = −
βθ1 = − 1,θ
rφ
r
eφθ1 =
(5.30)
As equações não lineares de equilíbrio que governam os coeficientes Nφo, Nθo,
Nφθo, βφo e βθo podem ser obtidas pela introdução das eqs. (5.26) nas eqs. (5.10). Se
o carregamento é axisimétrico, a deformação que causará perda de estabilidade
será também axisimétrica. Então βθo = 0 e os coeficientes Nφo, Nθo, Nφθo, βφo são
função somente de φ. Assim, as equações não lineares de cascas de revolução com
deformação axisimétrica são da forma:
d
(rNφ ) − rφNθ cos φ = −rrφpφ
dφ
d
(rNφθ ) + rφNφθ cos φ = −rrφpθ
dφ
(5.31)
d
d 1 d
rMφ ) −
(Mθ cos φ )
(
dφ rφ dφ
dφ
− ( rNθ + rφNθ s enφ ) −
d
(rNφβφ ) = −rrφp
dφ
98
Cascas Genéricas
onde pφ, pθ e p são componentes do carregamento nas direções φ, θ e normal à
casca, respectivamente. Das eqs. (5.11), as equações constitutivas são:
Nφ = C ( εφ + νεθ )
Mφ = D ( κφ + νκ θ )
Nθ = C ( εθ + νεφ )
Mθ = D ( κθ + νκ φ )
Nφθ = C
(5.32)
1− ν
γ φθ
2
e das eqs. (5.6), (5.7a), 5.7c) e (5.8), as relações cinemáticas são:
1
εφ = eφφ + βφ2
2
1 du
eφφ =
+ w
rφ dφ
eφθ
r d v
=
rφ dφ r
κφ =
1 dβφ
rφ dφ
εθ = eθθ
eθθ =
γ φθ = eφθ
1
(u cos φ + w sin φ )
r
(5.33)
1 dw
βφ = −
rφ dφ
1
κφ = βφ cos φ
r
Se a casca não está sujeita à um carregamento torcional, o coeficiente Nφθo =
0.
5.4.2 – Equações de estabilidade com rotações de pré-flambagem omitidas
Para análises nas quais as rotações de pré-flambagem podem ser
desprezadas, as equações de estabilidade podem ser obtidas a partir das eqs.
(5.29) omitindo os termos em βφo e βθo:
(rNφ1 ),φ + rφNφθ1,θ − rφNθ1 cos φ=0
(rNφθ1 ),φ + rφNθ1,θ + rφNφθ1 cos φ=0
1
rφ
( rMφ1 ),φ + 2 Mφθ1,φθ + Mφθ1,θ cos φ
r
rφ
,φ
rφ
+ Mθ1,θθ − (Mθ1 cos φ ),φ − ( rNφ1 + rφNθ1 s enφ )
r
− ( rNφoβφ1 + rNφθoβθ1 ) + ( rφNθoβθ1 + rφNφθoβφ1 ) = 0
,φ
,θ
`
(5.34)
Curso de Estabilidade Estrutural
99
onde as forças e momentos internos e as variáveis de deslocamento são dadas por:
1
ν
Nφ1 = C ( u1,φ + w1 ) + ( v1,θ + u1 cos φ + w1 senφ )
r
rφ
1
ν
Nθ1 = C ( v1,θ + u1 cos φ + w1 senφ ) + ( u1,φ + w1 )
rφ
r
u1,θ
1 − ν r v1
+
2 rφ r ,φ
r
Nφθ1 = C
βφ1,φ ν
+ ( βθ1,θ + βφ1 cos φ )
Mφ1 = D
r
rφ
1
ν
Mθ1 = D ( βθ1,θ + βφ1 cos φ ) + ( βφ1,φ )
rφ
r
Mφθ1 = D
βφ1 = −
βφ1,φ
1 − ν r βθ1
+
2 rφ r ,φ
r
w1,φ
rφ
βθ1 = −
w1,θ
r
(5.35)
Os coeficientes Nφo, Nθo, Nφθo na eq. (5.34) podem ser obtidos pela equações
lineares de equilíbrio. A omissão dos termos não lineares da eq. (5.31) fornece as
equações:
d
(rNφ ) − rφNθ cos φ = −rrφpφ
dφ
d
(rNφθ ) + rφNφθ cos φ = −rrφpθ
dφ
(5.36)
d
d 1 d
rMφ ) −
(Mθ cos φ ) − (rNφ + rφNθsenφ ) = −rrφp
(
dφ rφ dφ
dφ
onde as equações constitutivas e relações cinemáticas são dadas pelas eqs. (5.32)
e (5.33), exceto que:
εφ = eφφ
(5.37)
Em uma aproximação simplificada para a determinação dos coeficientes de
estabilidade, as equações lineares de flexão são freqüentemente substituídas pelas
100
Cascas Genéricas
equações lineares de membrana. Assim, eliminando os termos de flexão da eq.
(5.36), tem-se que:
d
(rNφ ) − rφNθ cos φ = −rrφpφ
dφ
d
(rNφθ ) + rφNφθ cos φ = −rrφpθ
dφ
rNφ + rφNθsenφ = rrφp
(5.38)
As eqs. (5.38) são estaticamente determinadas, portanto as soluções podem
ser obtidas sem o uso das relações constitutivas e cinemáticas.
Novamente, se a casca não está sujeita à um carregamento torcional, Nφθo =
0. Em tais casos, as equações de estabilidade obtidas pela substituição das eqs.
(5.35) nas eqs. (5.34) podem ser reduzidas em equações diferenciais ordinárias pela
introdução das soluções da forma:
u1 = un ( φ ) cosnθ
v1 = v n ( φ ) sennθ
(5.39)
w1 = w n ( φ ) cosnθ
Concluindo, as equações de estabilidade para cascas de revolução são dadas
pelas eqs. (5.29) e (5.34) com retenção ou não dos termos de pré-flambagem. As
equações de equilíbrio não lineares para carregamento simétrico são dadas pelas
eqs. (5.31). As equações lineares de flexão são dadas pelas eqs. (5.36) e as
equações lineares de membrana são dadas pelas eqs. (5.38)
5.5 - Aplicações das equações de estabilidade
Curso de Estabilidade Estrutural
101
6 – MÉTODO DOS ELEMENTOS FINITOS EM ESTABILIDADE
6.1 – Estabilidade em vigas
O problema da estabilidade em estruturas do tipo pórtico (viga e barra) se
resume em resolver o segundo variacional da energia potencial total (ver eq. A.43):
2
2
2
L
∂2 w
1 2
1 ∂u
∂w
dx
δ V = ∫ EA + EI 2 − P
2
2 0 ∂x
x
∂
x
∂
(6.1)
Observa-se no lado direito da eq. (6.1) que o primeiro termo é a energia de
deformação de membrana, o segundo termo a energia de deformação de flexão, e o
terceiro termo está relacionado ao trabalho realizado pela força axial P para encurtar
a coluna. As matrizes de rigidez em estruturas do tipo viga podem ser determinadas
aplicando o primeiro teorema de Castigliano na eq. (6.1) da forma:
Fi =
∂
(U + Ω )
∂qi
(6.2)
onde qi é o deslocamento (ou a rotação) que ocorre no ponto i e na direção da força
(ou do momento) Fi, aplicada também no ponto i.
6.2 – Matrizes de rigidez de um elemento de viga
Considere um elemento de viga de comprimento L, módulo de elasticidade E,
e momento de inércia I. As duas extremidades são denotadas pontos nodais (ou
simplesmente nós) 1 e 2. Em cada nó há uma deflexão w e uma rotação θ (∂w/∂x),
chamados graus de liberdade. Correspondendo a estes dois graus de liberdade w e
θ há dois esforços internos, uma força cortante F e um momento M,
respectivamente, Fig. 6.1.
A deflexão w é assumida ser uma função polinomial cúbica em x:
w(x) = a1 + a2 x + a3 x 2 + a4 x 3 = 1 x
x2
x3
a1
a
2
a 3
a4
(6.3)
102
Métodos dos Elementos Finitos em Estabilidade
z, w
1
M1, θ1
E, I
L
F1, w1
2
x
M2, θ2
F2, w2
Figura 6.1 – Elemento de viga reto com seção constante
Considerando que:
d4 w 1
= q(x)
dx 4 EI
d3 w 1
= q x + c1
dx 3 EI
d2 w 1 q 2
x + c1 x + c 2
=
dx 2 EI 2!
dw 1 q 3 c1 2
x +
x + c2 x + c3
=
dx EI 3!
2!
1 q 4 c1 3 c 2 2
w(x) =
x +
x +
x + c3 x + c 4
EI 4!
3!
2!
(6.4)
Portanto, a eq. (6.3) é exata quando a carga distribuída q(x) é nula.
As constantes a1, a2, a3 e a4 da eq. (6.3) são determinadas pela imposição
das condições de contorno:
∂w
(0) = θ1
∂x
∂w
p / x = L, w(L) = w 2 ,
(L) = θ2
∂x
p / x = 0, w(0) = w1,
(6.5)
Aplicando as condições de contorno, eq. (6.5), na eq. (6.3), temos:
w1 1
θ 0
1
=
w 2 1
θ2 0
0 a1
0 a2
L L2 L3 a3
1 2L 3L3 a4
0
1
0
0
A matriz inversa da eq. (6.6) fornece as constantes a1, a2, a3 e a4:
(6.6)
Curso de Estabilidade Estrutural
3
0
a1 L
a
L3
2 0
=
2
a3 −3L −2L
a4 2
L
0 w1
0
0 θ1
3L −L2 w 2
−2 L θ2
103
0
(6.7)
Substituindo a eq. (6.7) na eq. (6.3) e reagrupando, obtemos a forma final da
função deflexão:
w(x) = f1(x) w1 + f2 (x) θ1 + f3 (x) w 2 + f4 (x) θ2
(6.8)
onde f1(x), f2(x), f3(x) e f4(x) são funções de forma dadas por:
2
x
x
f1(x) = 1 − 3 + 2
L
L
3
x 2 x3
f2 (x) = x − 2 + 2
L L
2
x
x
f3 (x) = 3 − 2
L
L
(6.9)
3
x 2 x3
f4 (x) = − + 2
L L
A primeira e a segunda derivada da deflexão dada pela eq. (6.8) são:
∂w
= f1' (x) w1 + f2' (x) θ1 + f3' (x) w 2 + f4' (x) θ2
∂x
∂2w
= f1'' (x) w1 + f2'' (x) θ1 + f3'' (x) w 2 + f4'' (x) θ2
2
∂x
(6.10)
Aplicando o primeiro teorema de Castigliano na eq. (6.1) e considerando as
eqs. (6.10), tem-se:
L
F1 =
2 E I
∂
f1'' (x) w1 + f2'' (x) θ1 + f3'' (x) w 2 + f4'' (x) θ2 f1'' (x)dx −
(U + Ω ) =
2 ∫0
∂w1
L
2 P
f1' (x) w1 + f2' (x) θ1 + f3' (x) w 2 + f4' (x) θ2 f1' (x)dx
∫
2 0
Colocando a eq. (6.11) de forma mais compacta:
(6.11)
104
Métodos dos Elementos Finitos em Estabilidade
F1 = ( k11w1 + k12θ1 + k13 w 2 + k14 θ2 ) − ( k G11w1 + k G12θ1 + k G13 w 2 + k G14θ2 )
(6.12)
onde:
L
k11 = EI ∫ f1'' (x).f1'' (x) dx
0
L
k12 = EI ∫ f1'' (x).f2'' (x) dx
0
(6.13)
L
k13 = EI ∫ f1'' (x).f3'' (x) dx
0
L
k14 = EI ∫ f1'' (x).f4'' (x) dx
0
e:
L
k G11 = P ∫ f1' (x).f1' (x) dx
0
L
k G12 = P ∫ f1' (x).f2' (x) dx
0
(6.14)
L
k G13 = P ∫ f1' (x).f3' (x) dx
0
L
k G14 = P ∫ f1' (x).f4' (x) dx
0
Considerando que M =
∂
(U + Ω) , e generalizando para os graus de liberdade
∂θ
θ1, w2 e θ2, tem-se a forma generalizada para os termos da matriz de rigidez:
L
k ij = EI ∫ fi'' (x).f j'' (x) dx
(6.15)
0
e a forma generalizada para os termos da matriz de rigidez geométrica, também
chamada de matriz de rigidez geométrica ou matriz de tensão inicial:
L
k Gij = P ∫ fi' (x).f j' (x) dx
0
(6.16)
Curso de Estabilidade Estrutural
105
Colocando em forma matricial o resultado das integrais dadas pelas eqs.
(6.15) e (6.16), obtêm-se as matrizes de rigidez elementar para um elemento de
viga:
12
L
F1
M
E I 6
1
= 2
F2 L − 12
M2
L
6
ou
6
4L
−6
2L
12
L
−6
−
12
L
−6
12
L
6
1
2L P
− 10 12
−
−6
L
4L
1
1
−
12
L
4L
3
−1
−1
12
L
L
3
−1
−
1
L
−
3
−1
4L
3
w1
θ
1
w 2
θ2
(6.17)
{F} = [k ] − [k G ] {q}
onde [k] é a matriz de rigidez clássica de viga em flexão e [kG] é a matriz de rigidez
PL2
é definido como sendo autovalor e o vetor {q} como
geométrica. O termo
10EI
sendo autovetor. A eq. (6.17) é resolvida impondo a nulidade do determinante da
matriz global dada pela soma das matrizes elementares dadas pela eq. (6.17), e
pela imposição das condições de contorno.
Exemplo 6.1: Determine pelo método dos elementos finitos a carga crítica para uma
coluna bi-engastada de comprimento l e rigidez EI, usando somente um elemento do
tipo viga e em seguida dois elementos.
z, w
P
EI
P
l
M2, θ2
M1, θ1
F1, w1
F2, w2
x
106
Métodos dos Elementos Finitos em Estabilidade
Devido à simetria do problema, pode-se analisar somente uma metade da
coluna, nas quais as condições de contorno são: w1 = θ1 = θ2 = 0 e F1 = F2 = 0.
Impondo as condições de contorno na eq. (6.17), o problema se resume em:
E I 12 P 12
−
2
L L 10 L
{F2 = 0} =
{w 2 }
Como o comprimento do elemento é L = l /2, a carga crítica encontrada é:
Pcr =
40EI
π2EI
=
(0,497 l)2
l2
Comparado com a expressão que fornece o valor exato da carga crítica
Pcr =
π2EI
, o erro obtido usando o método dos elementos finitos com apenas um
(0,5 l)2
elemento é de 1,32 %.
Resolvendo o problema com dois elementos, considerando também a simetria
do problema, onde as condições de contorno são agora, w1 = θ1 = θ3 = 0 e F1 = F2 =
F3 = 0. Neste caso o sistema de equações de resume em:
12 12
+
0
L
L
E I
0 = 2 −6 + 6
0 L 12
−
L
12 12
+
12
−6 + 6 −
L
L
L
P
4L + 4L −6 −
−1 + 1
10
12
12
−6
−
L
L
−1 + 1
4L 4L
+
3
3
−1
12
L w
2
−1 θ2
w
12 3
L
−
PL2
, o sistema de equações pode ser colocado da forma:
Chamando de λ =
10EI
12
24
− (1 − λ )
0
L (1 − λ )
L
w 2
λ
0
8L(1 − )
−(6 − λ ) θ2 = 0
3
w 3
12
12
− (1 − λ ) −(6 − λ )
(1 − λ )
L
L
O polinômio característico quando se impôe o determinante da matriz igual a
zero é:
Curso de Estabilidade Estrutural
107
(1 − λ ) (15λ 2 − 52λ + 12 ) = 0
onde as raízes são λ1 = 0,2486, λ2 = 1,0 e λ3 = 3,2181.
Substituindo o comprimento do elemento L por = l /4, a menor carga crítica é
agora Pcr =
39,78EI
, o que corresponde a um erro de 0,8 % quando comparado com
l2
o valor exato.
Exemplo 6.2: Determine pelo método dos elementos finitos a carga crítica para uma
coluna bi-articulada de comprimento l e rigidez EI, usando somente um elemento do
tipo viga.
z, w
EI
P
P
x
l
M2, θ2
M1, θ1
F1, w1
F2, w2
Devido à simetria do problema, pode-se analisar somente uma metade da
coluna, na qual as condições de contorno são: w1 = θ2 = 0 e F1 = F2 = 0.
Impondo as condições de contorno na eq. (6.17), o problema se resume em:
4L
−1
4L −6
M1 = 0
θ1
E I
P 3
= 2
12 −
10
12 w 2
F2 = 0 L −6
−
1
L
L
Chamando de λ =
PL2
, o sistema de equações pode ser colocado da forma:
10EI
108
Métodos dos Elementos Finitos em Estabilidade
λ
4L 1 − 3 −(6 − λ ) θ 0
1=
0
w
12
(1 − λ ) 2
−(6 − λ )
L
O polinômio característico quando se impôe o determinante da matriz igual a
zero é:
(15λ
2
)
− 52λ + 12 = 0
onde as raízes são λ1 = 0,2486, λ2 = 3,2181. Como L = l /2, a carga crítica
encontrada é:
1,01π2 EI
Pcr =
l2
Comparado com a expressão que fornece o valor exato da carga crítica
π2EI
Pcr = 2 , o erro obtido usando o método dos elementos finitos com apenas um
l
elemento é de 1,0 %.
Exemplo 6.3: Determine pelo método dos elementos finitos a carga crítica para uma
coluna engastada-livre de comprimento l e rigidez EI, usando somente um elemento
do tipo viga.
z, w
P
EI
P
l
M2, θ2
M1, θ1
F1, w1
F2, w2
x
Curso de Estabilidade Estrutural
109
As condições de contorno do problema são: w1 = θ1 = 0 e F1 = F2 = 0.
Impondo as condições de contorno na eq. (6.17), o problema se resume em:
12
−1
12
−6 P L
F2 = 0
w 2
E I
−
= 2 L
M2 = 0 L −6 4L 10 −1 4L θ2
3
Chamando de λ =
PL2
, o sistema de equações pode ser colocado da forma:
10EI
12
L (1 − λ ) −(6 − λ ) θ 0
1=
λ
−(6 − λ ) 4L 1 − w 2 0
3
O polinômio característico quando se impôe o determinante da matriz igual a
zero é:
15λ 2 − 52λ + 12 = 0
onde as raízes são λ1 = 0,2486, λ2 = 3,2181. Como L = l, a carga crítica encontrada
é:
Pcr =
π2EI
(1,99 l)2
Comparado com a expressão que fornece o valor exato da carga crítica
Pcr =
π2EI
, o erro obtido usando o método dos elementos finitos com apenas um
(2 l)2
elemento é de 0,8 %.
Exemplo 6.4: Determine pelo método dos elementos finitos a carga crítica para uma
coluna engastada-rotulada de comprimento l e rigidez EI, usando somente um
elemento do tipo viga.
110
Métodos dos Elementos Finitos em Estabilidade
z, w
P
EI
P
x
l
M2, θ2
M1, θ1
F1, w1
F2, w2
As condições de contorno do problema são: w1 = θ1 = w2 = 0 e F1 = F2 = M2 =
0.
Impondo as condições de contorno na eq. (6.17), o problema se resume em:
E I
P 4L
4L
−
[
]
2
10 3
L
{M2 = 0} =
{θ2 }
Como L = l, a carga crítica encontrada é:
Pcr =
30EI
π2 EI
=
l2
( 0,574 l )2
Comparado com a expressão que fornece o valor exato da carga crítica
Pcr =
π2EI
, o erro obtido usando o método dos elementos finitos com apenas um
(0,7 l)2
elemento é de 48,95 %.
Resolvendo o problema com dois elementos, onde as condições de contorno
são agora, w1 = θ1 = w3 = 0 e F1 = F2 = F3 = 0. Neste caso o sistema de equações de
resume em:
Curso de Estabilidade Estrutural
12 12
L + L
0
E I
0 = 2 −6 + 6
0 L 6
111
12 12
+
−6 + 6 6
L
L
P
4L + 4L 2L −
−1 + 1
10
2L
4L
1
Chamando de λ =
1
w 2
L
− θ2
3
θ
4L 3
3
−1 + 1
4L 4L
+
3
3
L
−
3
PL2
, o sistema de equações pode ser colocado da forma:
10EI
24
0
(6 − λ )
(1 − λ )
L
w 2
λ
λ
0
8L(1 − ) L 2 + θ2 = 0
3
3
θ3
λ
λ
(6 − λ ) L 2 + 4L(1 − )
3
3
O polinômio característico quando se impôe o determinante da matriz igual a
zero é:
10λ3 −
220 2
λ + 128λ − 48 = 0
3
A menor raíz do polinômio característico é λ1 = 0,5175. Substituindo o
comprimento do elemento L por = l/2, a menor carga crítica é agora é
Pcr =
π2EI
, o que corresponde a um erro de 2,6 % quando comparado com o
(0,691l)2
valor exato.
Exemplo 6.5: Determine pelo método dos elementos finitos a carga crítica para uma
coluna engastada-livre de comprimento l e rigidez EI com uma mola de rigidez k
colocada na extremidade livre, usando somente um elemento do tipo viga.
z, w
P
EI
P
k
l
x
112
Métodos dos Elementos Finitos em Estabilidade
M2, θ2
M1, θ1
F1, w1
F2, w2
As condições de contorno do problema são: w1 = θ1 = 0 e F1 = 0 e F2 = - k w2.
A rigidez da mola pode ser colocada da forma k = α
12 E I
.
L3
Impondo as condições de contorno na eq. (6.17), o problema se resume em:
12
−1
12
−6 P L
F2 = −k w 2
w 2
E I
−
= 2 L
M2 = 0 L −6 4L 10 −1 4L θ2
3
Chamando de λ =
PL2
, o sistema de equações pode ser colocado da forma:
10EI
12
L (1 + α − λ ) −(6 − λ ) w 0
2 =
λ
−(6 − λ )
θ2 0
−
4L
1
3
O polinômio característico quando se impôe o determinante da matriz igual a
zero é:
(15λ
2
)
− 52λ + 12 + 16α(3 − λ ) = 0
Como L = l, a carga crítica encontrada, colocada em função do parâmetro α é
conforme mostra a figura abaixo:
Curso de Estabilidade Estrutural
113
2,25
2,00
Pcr
1,25
π2EI
1,00
l2
0,50
0
0
0,5
1,0
α
1,5
2,0
Observa-se que quanto maior α maior a rigidez da mola, consequentemente,
mais a extremidade se aproxima de um apoio rígido, e mais a carga crítica se
π2EI
.
aproxima do valor Pcr =
(0,7 l)2
Exemplo 6.6: Determine pelo método dos elementos finitos a carga crítica para uma
coluna bi-articulada de comprimento l e rigidez EI, com uma mola de rigidez k
colocada nno meio do vão.
y, w
EI
P
P
x
k
l/2
l/2
M2, θ2
M1, θ1
F1, w1
F2, w2
As condições de contorno do problema são: w1 = w3 = 0, F1 = F3 = 0, M1 = M3
= 0 e F2 = k w2. A rigidez da mola pode ser colocada da forma k = α
24 E I
.
L3
Impondo as condições de contorno na eq. (6.17), o problema se resume em:
114
Métodos dos Elementos Finitos em Estabilidade
−6
4L
M1 = 0
12 12
F = −k w
+
E I −6
2
2
=
L
L
2
M2 = 0 L 2L −6 + 6
M3 = 0
6
0
Chamando de λ =
4L
−1
3
2L
0
−1 12 + 12
−6 + 6 6 P
L
L
−
10 L
4L + 4L 2L
−
−1 + 1
3
2L
4L
0
1
−
L
3
−1 + 1
4L 4L
+
3
3
L
−
3
0
θ
1
1
w 2
L θ2
−
3 θ3
4L
3
PL2
, o sistema de equações pode ser colocado da
10EI
forma:
λ
4L 1 − 3
−6 + λ
λ
L(2 + 3 )
0
−6 + λ
24
(1 + α − λ )
L
0
6−λ
λ
θ1 0
0
6−λ
w
0
2 =
λ θ
λ
0
8L 1 − L(2 + ) 2
3 θ3 0
3
λ
λ
L(2 + ) 4L 1 −
3
3
L(2 + )
3
0
O polinômio característico quando se impôe o determinante da matriz igual a
zero é:
100λ 4 −
3200
320 3
100λ 3 + 3296λ 2 − 3072λ + 576 − α
λ − 1088λ 2 + 3072λ + 2304 = 0
3
3
Como L = l/2, a carga crítica encontrada, colocada em função do parâmetro α
é conforme mostra a figura abaixo:
5,00
4,00
Pcr
3,00
π2EI
2,00
l2
1,00
0
0
1,0
2,0
α
3,0
4,0
Curso de Estabilidade Estrutural
115
Observa-se que quanto maior α maior a rigidez da mola, consequentemente,
mais a extremidade se aproxima de um apoio rígido, e mais a carga crítica se
aproxima do valor Pcr =
4π2EI
.
l2
6.3 – Matriz de rigidez de um elemento de barra
Considere um elemento de barra de comprimento L, módulo de elasticidade
E, e seção transversal A, Fig. 13.1. As duas extremidades são denotadas pontos
nodais (ou simplesmente nós) 1 e 2. Sobre estes nós estão atuando as forças
(externas ao elemento) P1 e P2, respectivamente. Correspondendo a estas duas
forças, há dois deslocamentos u1 e u2 chamados graus de liberdade.
1
2
E, A
P1, u1
P2, u2
L
x
Figura 6.2 – Elemento finito de barra
Para um elemento de barra com tensão axial constante ou deformação axial
constante, o deslocamento axial pode ser assumido variar linearmente em x:
u( x ) = a1 + a 2 x
(6.18)
com a1 e a2 constantes à serem determinadas pela imposição das condições de
contorno:
p / x = 0, u( x ) = u(0) = u1 = a1
p / x = L, u( x ) = u(L ) = u 2 = a1 + a 2L
⇒
a2 =
u 2 − u1
L
(6.19)
Substituindo os resultados de a1 e a2 da eq. (6.19) na eq. (6.18), temos:
u( x ) = f1( x ) u1 + f 2 ( x ) u 2
onde f1(x) e f2(x) são ditas funções de forma e são como:
(6.20)
116
Métodos dos Elementos Finitos em Estabilidade
f1( x ) = 1 −
x
L
(6.21)
x
f2 ( x) =
L
Para o caso de tensões e deformações uniaxiais, a deformação é definida
como:
ε=
∂u
∂x
(6.22)
Substituindo as eqs. (6.20) e (6.21) na eq. (6.22), temos:
ε=
∂f1( x )
∂f ( x )
u1 + 2
u 2 = f1' ( x ) u1 + f 2' ( x ) u 2
∂x
∂x
(6.23)
A força axial atuando ao longo do elemento é obtida da forma:
P=σA =Eε A =EA
∂u
∂x
(6.24)
Substituindo as eqs. (6.20) e (6.21) na eq. (6.24), tem-se:
[
P = E A f1' ( x ) u1 + f 2' ( x ) u 2
]
(6.25)
A expressão de energia de deformação para o caso de barras solicitadas
axialmente é da forma:
L
U=
P2
∫ 2 E A dx
0
(6.26)
Substituindo eq. (6.25) na eq. (6.26), temos:
L
[
EA '
U=
f1( x ) u1 + f 2' ( x ) u 2
2 0∫
]
2
dx
Aplicando o primeiro teorema de Castigliano,
com relação ao deslocamento u1, temos:
(6.27)
∂U
= P , derivando a energia
∂u
Curso de Estabilidade Estrutural
L
P1 =
117
[
]
∂U 2 E A '
=
f1( x ) u1 + f 2' ( x ) u 2 f1' ( x ) dx
∫
∂u1
2 0
(6.28)
Desenvolvendo a eq. (6.28), temos:
L
L
P1 = E A ∫ f1' ( x ).f1' ( x ) dx u1 + E A ∫ f1' ( x ).f 2' ( x ) dx u 2
0
0
(6.29)
E, aplicando o primeiro teorema de Castigliano, derivando a energia com
relação ao deslocamento u2, temos:
L
[
]
∂U 2 E A '
P2 =
=
f1( x ) u1 + f 2' ( x ) u 2 f 2' ( x ) dx
∂u 2
2 0∫
(6.30)
Desenvolvendo a eq. (6.30), temos:
L
L
'
'
P2 = E A ∫ f 2 ( x ).f1( x ) dx u1 + E A ∫ f 2' ( x ).f 2' ( x ) dx u 2
0
0
(6.31)
Colocando as eqs. (6.29) e (6.31) na forma matricial:
P1
=
P2
k 11 k 12
k
21 k 22
u1
u 2
ou
{P} = [k ] {u}
(6.32)
onde [k] é a matriz de rigidez do elemento de barra com seus coeficientes definidos
da seguinte maneira:
L
K ij = E A ∫ fi' ( x ).f j' ( x ) dx
(6.33)
0
Aplicando a eq. (6.21) na eq. (6.33), a matriz de rigidez elementar é:
1 − 1
L − 1 1
[k ] = E A
(6.34)
118
Métodos dos Elementos Finitos em Estabilidade
6.4 – Estabilidade em pórticos
As matrizes de rigidez de um elemento de viga, dadas pela eq. (6.17) são
obtidas quando o elemento está disposto paralelamente ao sistema de eixos X-Z.
Para os casos mais gerais, como por exemplo os pórticos, as vigas estão dispostas
aleatoriamente no plano X-Z. Assim, é necessário determinar matrizes de rigidez
genéricas, fazendo um ângulo φ com o eixo x, Fig. 6.3:
Z
z
Z2 , w 2
X2 , u2
x
2
M2, θ2
X
1
M2, θ2
E, I, L
Z1, w1
Z2, w2
2
X2, u2
φ
M1, θ1
X1, u1
X1, u1
M1, θ1
1
φ
Z1, w1
Figura 6.3 – Elemento de viga disposto aleatoriamente no plano X-Z
As forças e os momentos no sistema de coordenadas local (x, z) estão
relacionados com as forças e momentos no sistema de coordenadas global (X, Z)
pela matriz de transformação:
X1 c
Z1 −s
M1 0
=
X2 0
Z 0
2
M2 0
s 0
c 0
0 1
0 0
0 0
0 0
0 0
0 0 0
0 0 0
c s 0
−s c 0
0 0 1
0
X1
Z
1
M1
ou F = [ T ]{F}
X2
Z2
M2
{}
com c = cos φ, s = sen φ e [T] é a matriz de transformação.
(6.35)
Curso de Estabilidade Estrutural
119
Uma mesma relação pode ser obtida considerando os deslocamentos:
{q} = [T ]{q}
(6.36)
Observa-se que a eq. (6.17), as matrizes de rigidez são obtidas no sistema de
coordenadas paralelo à viga, ou seja, ( x, z) . Logo, conforme a Fig. (6.3), a eq. (6.17)
é:
{F} = k − kG {q}
(6.37)
Substituindo as eqs. (6.35) e (6.36) na eq. (6.37), temos:
[T ]{F} = k − kG [T ]{q}
(6.38)
ou:
{F} = [T ]
−1
k − kG [ T ]{q} = [ T ]T k − kG [ T ]{q}
(6.39)
Logo, a matriz de rigidez de um elemento de viga obtida em um sistema de
coordenadas arbitrário na qual são considerados os efeitos de membrana e de
flexão é:
12I 2
2
ALc + L s
12I
12I 2
Rs2 +
c
simetrica
AL − L cs
L
6Ic
4IL
−6Is
E
[k ] = 2
L − ALc 2 − 12I s2 − AL + 12I cs 6Is ALc 2 + 12I s2
L
L
L
− AL + 12I cs − ALs2 − 12I c 2 −6Ic AL − 12I cs
L
L
L
6Ic
2IL
6Is
−6Is
12I 2
c
L
−6Ic
ALs2 +
(6.40)
4IL
onde R é definido como a relação entre a seção transversal A e o momento de
inércia I (R = A/I)
A matriz de rigidez geométrica de um elemento de viga obtida em um sistema
de coordenadas arbitrário é:
120
Métodos dos Elementos Finitos em Estabilidade
12 2
L s
− 12 cs 12 c 2
L
L
−s
c
P
=
k
[ G ] 10 12
12
− s2
cs
L
L
12
12I 2
cs −
c
L
L
c
−s
simetrica
4L
3
s
−c
−
12 2
s
L
12
− cs
L
12 2
c
L
s
−c
L
3
4L
3
(6.41)
Exemplo 6.7 – Determine a carga crítica para o pórtico plano bi-engastado como
mostrado abaixo.
P
P
EI
2
3
l
EI
EI
Z
1
4
X
l
Figura 6.4 – Forma flambada de um pórtico no plano bi-engastado
As matrizes de rigidez elementares dos elementos 1-2 e 3-4, sabendo que
cos φ = 0 e sen φ = 1 (φ = 90°), são:
Curso de Estabilidade Estrutural
121
12I
L
R
sim
0
0
4IL
E −6I
[k ] = 2 12I
12I
L
0
6I
− L
L
− AL 0
0 AL
0
−6I
0
2IL 6I
0 4IL
12
L
0
−1
P
[k G ] = 10 12
−
L
0
−1
0
sim
0
4L
3
0
1
0
0
L
c −
3
12
L
0
0
1
0
4L
3
e as matrizes de rigidez elementares do elemento 2-3, sabendo que cos φ = 1 e sen
φ = 0 (φ = 0°), são:
AL
12I
0
sim
L
6I
4IL
E 0
[k ] = 2 − AL 0
0
AL
L
12I
12I
0
−
−6I 0
L
L
0
6I
2IL 0 −6I 4IL
0
0 12
sim
L
4L
c
0
P
3
[k G ] = 10 0 0
0
0
0 − 12I −1 0 12
L
L
L
4L
0
1
0
−
−1
3
3
As condições de contorno do problema são: u1 = w1 = θ1 = w2 = w3 = u4 = w4 =
θ4 = 0.
u2
0
0
E
= 2
0 L
0
θ2
u3
θ3
u2
12
L
12I
AL
6I
AL
0
+
−
L
1
4IL + 4IL
0
2 IL P
6I
− 10
12I
0
0
AL +
6I
− AL
L
0
2IL
6I
4IL + 4IL
0
θ2
u3
1
0
4L
3
0
0
12
L
0
1
θ3
0
u
2
0
θ2
u
1 3
θ3
4L
3
Devido a anti-simetria da forma flambada do pórtico, tem-se também que: u2 =
u3 e θ2 = θ3. Assim, o problema se reduz para:
122
Métodos dos Elementos Finitos em Estabilidade
12
12
6 P L
0 EI
−
= 2 L
0 L 6 10L 10 1
1
u2
4L θ2
3
PL2
, o sistema de equações pode ser colocado da forma:
Chamando de λ =
10EI
12
(6 − λ )
L (1 − λ )
u 0
2 =
4L θ2 0
(6 − λ ) 10L − 3 λ
O polinômio característico quando se impõe o determinante da matriz igual a
zero é:
15λ 2 − 124λ + 84 = 0
onde a menor raiz é λ1 = 0,7445.
Logo, a menor carga crítica é Pcr =
7,445EI
, o que corresponde a um erro de
l2
1,48 % comparado com o valor exato, Pcr =
7,344EI
.
l2
Exemplo 6.8 – Determine a carga crítica para o pórtico plano bi-articulado como
mostrado abaixo, considerando as duas formas de flambar do pórtico (a) e (b).
P
P
P
δ2
P
2
3
3
2
L
Z
1
4
X
1
4
L
(a)
(b)
Curso de Estabilidade Estrutural
123
As condições de contorno no caso (a) são: u1 = w1 = u2 = w2 = u3 = w3 = u4 =
w4 = 0.
θ1
0
0
E
= 2
0 L
0
θ2
θ3
θ4
θ1
4L
3
2IL
0
0
4IL
− L
2IL 4IL + 4IL
2IL
0 P 3
−
0
2IL
4IL + 4IL 2IL 10
0
0
2IL
4IL
0
0
θ2
L
3
4L 4L
+
3
3
L
−
3
−
0
θ3
0
L
3
4L 4L
+
3
3
L
−
3
−
θ4
0
θ
1
0
θ2
L θ3
−
3 θ4
4L
3
Devido a simetria da forma flambada do pórtico neste caso, tem-se também
que: θ4 = – θ1 e θ3 = – θ2. Assim, o problema se reduz para:
4L
0 EI 4 L 2 L P 3
= 2
−
0 L 2 L 6 L 10 − L
3
L
−
3 θ1
9L θ2
3
PL2
Chamando de λ =
, o sistema de equações de colocada da forma:
10EI
λ
λ
4 L 1− 3 L 2 + 3 θ
1 0
=
θ2 0
λ
L 2 + 3 L(2 − λ )
3
O polinômio característico quando se impõe o determinante da matriz igual a
zero é:
35λ 2 − 192λ + 180 = 0
A menor raiz do polinômio é λ1 = 1,2. Logo, a menor carga crítica é
Pcr =
12EI
, o que corresponde a um erro de 6,61 % comparado com o valor exato,
l2
Pcr = 1,302
π2E I
.
l2
124
Métodos dos Elementos Finitos em Estabilidade
As condições de contorno no caso (b) são: u1 = w1 = w2 = w3 = u4 = w4 = 0.
θ1
θ1
4L
3
6I
2IL
0
0
0
4IL
1
6I 12I + AL
− AL
6I + 0
0
0
0
L
− L
6I + 0
4IL + 4IL
0
2IL
0
E 2IL
P 3
0
=
−
2
12I
10
0 L 0
− AL
0
0
AL +
0 + 6I
0 + 6I
L
0
0
0
2IL
0 + 6I
4IL + 4IL 2IL
0
0
0
0
0 + 6I
2IL
4IL
0
u2
θ2
u3
θ3
θ4
u2
θ2
1
−
L
3
u3
θ3
0
0
0
12
+0
L
1+ 0
0
1+ 0
4L 4L
+
3
3
0
0
0
0
0
−
L
3
0
0+
12
L
0 +1
+1
−
L
3
0 +1
4L 4L
+
3
3
L
−
3
θ4
0
0 θ1
u
2
0
θ2
u
+1 3
θ3
L θ
− 4
3
4L
3
Devido a simetria da forma flambada do pórtico neste caso, tem-se também
que: θ4 = θ1, u3 = u2 e θ3 = θ2. Assim, o problema se reduz para:
4L
4 L 6 2 L
3
0
12
P
EI
1
6 −
0 = 2 6
L
10
0 L
2 L 6 10 L
− L
3
Chamando de λ =
1
12
L
1
L
−
3 θ
1
1 u2
θ2
7L
3
PL2
, o sistema de equações se coloca da forma:
10EI
λ
λ
L 2 +
4 L 1 − (6 − λ )
3
3
θ1 0
12
(1 − λ )
(6 − λ ) u2 = 0
(6 − λ )
L
θ 0
7λ 2
λ
(6 − λ ) L 10 −
L 2 + 3
3
O polinômio característico quando se impõe o determinante da matriz igual a
zero é:
95λ 3 − 786λ 2 + 1332λ − 216 = 0
A menor raiz do polinômio é λ = 0,1811. Logo, a menor carga crítica é
Pcr =
1,811 EI
, o que corresponde a um erro de 0,3 % comparado com o valor exato,
l2
Curso de Estabilidade Estrutural
125
π2E I
Pcr = 0,184 2 .
l
6.5 – Estabilidade em placas
O problema da estabilidade em estruturas do tipo placa se resume em
resolver o segundo variacional da energia potencial total (ver eq. 3.59):
2
2
1 2
1− ν
2
δ V = ∫ ∫ u1,x
+ v1,y
+ 2νu1,x v1,y +
u1,y + v1,x )
(
2
2
+
1 − ν2
2
Nx0 w 21,x + 2Nxy0 w1,x w1,y + Ny0 w1,y
Eh
+
h2 2
w 1,xx + w 21,yy + 2νw1,xx w1,yy + 2 (1 − ν ) w 21,xy dxdy
12
(
)
(6.42)
Considere os deslocamentos e suas derivadas como sendo uma aproximação
da forma:
u = ∑ fi (x,y) ui
u,x = ∑ fi,x (x,y) ui
, u,y = ∑ fi,y (x,y) ui
v = ∑ fi (x,y) v i
v,x = ∑ fi,x (x,y) v i
, v,y = ∑ fi,y (x,y) v i
w = ∑ fi (x,y) w i
w,x = ∑ fi,x (x,y) w i
w,xx = ∑ fi,xx (x,y) w i ,
, w,y = ∑ fi,y (x,y) w i ,
w,xy = ∑ fi,xy (x,y) w i ,
(6.43)
w,yy = ∑ fi,yy (x,y) w i
Como o deslocamento transverso w deve ser derivável duas vezes em x e
duas vezes em y, o elemento a ser tomado deve considerar este fato.
Aplicando o primeiro teorema de Castigliano no segundo variacional, temos:
Fx1 =
∂(U − W )
= 2f1,x ( ∑ fi,xui + ν ∑ fi,y v i ) + (1 − ν ) ( ∑ fi,yui + ∑ fi,x v i ) f1,y
∂u1
Fy1 =
∂(U − W )
= 2f1,y ( ∑ fi,y v i + ν ∑ fi,x v i ) + (1 − ν ) ( ∑ fi,yui + ∑ fi,x v i ) f1,x
∂v1
Fz1 =
∂(U − W )
1 − ν2
=2
Nx0 ( ∑ fi,x w i ) f1,x + Nxy0 f1,x ( ∑ fi,y w i ) + ( ∑ fi,x w i ) f1,y + Ny0 ( ∑ fi,y w i ) f1,y
∂w1
Eh
(
(6.43)
)
h2
+2 f1,xx ( ∑ fi,xx w i + ν ∑ fi,yy w i ) + f1,yy ( ∑ fi,yy w i + ν ∑ fi,xx w i ) + 2 (1 − ν ) ( ∑ fi,xy w i ) f1,xy
12
126
Métodos dos Elementos Finitos em Estabilidade
Aplicando o primeiro teorema de Castigliano em todos os nós, o sistema de
equações se colocada da forma:
2
h
6
f1,xx ( f1,xx + νf1,yy ) + f1,yy ( f1,yy + νf1,xx ) + 2 (1 − ν ) f1,xy f1,xy
f2,xx ( f1,xx + νf1,yy ) + f2,yy ( f1,yy + νf1,xx ) + 2 (1 − ν ) f2,xy f1,xy
f1,x .f1,x
1 − ν2
+2
Nx0 f2,x .f1,x
Eh
f1,x .f2,x
f2,x .f2,x
f1,x .f1,y + f1,y .f1,x
1 − ν2
+2
Nxy0 f2,x .f1,y + f2,y .f1,x
Eh
f1,y .f1,y
w1
2
1
−
ν
w +2
Ny0 f2,y .f1,y
2
Eh
f1,x .f2,y + f1,y .f2,x
f2,x .f2,y + f2,y .f2,x
w1
w 2 +
f1,y .f2,y
f2,y .f2,y
w1
w 2
(6.44)
w1 0
w 2 = 0
Para um caso particular onde Ny0 = Nxy0 = 0, e fazendo
(
12 1 − ν 2
3
Eh
)N
x0
=
Nx0
o
D
problema de autovalor-autovetor se resume da forma:
f ( f + νf1,yy ) + f1,yy ( f1,yy + νf1,xx ) + 2 (1 − ν ) f1,xy f1,xy
1,xx 1,xx
f ( f + νf ) + f ( f + νf ) + 2 (1 − ν ) f f
1,yy
2,yy 1,yy
1,xx
2,xy 1,xy
2,xx 1,xx
f1,x .f1,x
+λ f2,x .f1,x
f1,x .f2,x
f2,x .f2,x
(6.45)
w1 0
w = 0
2
Considere um elemento de placa quadrangular quadrático como representado
na Fig. 6.4, onde o deslocamento transverso w pode ser aproximado por um
polinômio da forma:
w(x,y) = a0 + a1x + a2 y + a3 x 2 + a4 xy + a5 y 2 + a6 x 2 y + a7 xy 2
ou
w(x,y) = 1 x y x 2
(6.46)
xy y 2
x 2 y xy 2 {ai }
Curso de Estabilidade Estrutural
127
y
7
4
3
y3 = y4 = y7
6
8
y6 = y8
1
2
5
x1 = x4 = x8
x5 = x7
x2 = x3 = x6
y1 = y2 = y5
x
Figure 6.4 – Elemento de placa quadrangular quadrático
Impondo as condições de contorno em cada nó, temos:
1
w1
1
w
2
1
w3
w 4
1
= {w i } =
w5
1
w 6
1
w7
1
w
8
1
x1
y1
x12
x1y1
y12
x12 y1
x2
y2
x 22
x2 y2
y 22
x 22 y 2
x3
y3
x 32
x3 y3
y32
x32 y3
x4
y4
x 24
x4 y4
y 24
x 24 y 4
y5
x5
2
x5 y5
x6
y6
x6 y6
x52 y5
x 62 y 6
x7
y7
x7 y7
y72
x72 y7
x8
y8
x 62
2
x7
x 82
y52
y 62
x8 y8
y82
x82 y8
x5
x1y 12
a0
x 2 y 22 a
1
x3 y32 a2
x 4 y 24 a3
= [C] {ai }
2 a
x5 y5 4
a
x 6 y 62 5
a
2 6
x7 y7
a7
x8 y82
(6.47)
Portanto, o deslocamento transverso w, e suas derivadas, podem ser
colocadas da forma:
w(x,y) = 1 x y x 2
xy y 2
x 2 y xy 2 [C]
−1
{w i }
w,x (x,y) = 0 1 0 2x y 0 2xy y 2 [C]
{w i }
2xy [C]
{w i }
−1
w,y (x,y) = 0 0 1 0 x 2y x 2
−1
w,xx (x,y) = 0 0 0 2 0 0 2y 0 [C]
{w i }
[C]−1 {w i}
−1
w,yy (x,y) = 0 0 0 0 0 2 0 2x
w,xy (x,y) = 0 0 0 0 1 0 2x 2y [C]
−1
{w i }
(6.48)
128
Métodos dos Elementos Finitos em Estabilidade
As matrizes de rigidez clássica e de rigidez geométrica podem ser obtidas
considerando as coordenadas dos nós do elemento como sendo x1 = x4 = x8 = 0, x2
= x2 = x6 = Lx, x5 = x7 = Lx/2, y1 = y2 = y5 = 0, y3 = y4 = x7 = Ly, y6 = y8 = Ly/2. Dessa
forma, a matriz de rigidez geométrica é:
52 84 230 17 −80 −6 −40 6
52 17 23 −80 6 −40 −6
52 28 −40 6 −80 −6
52 −40 −6 −80 6
Lx
[k G ] = 90L
160 0 80
0
y
−48
sim
48 0
160
0
48
E a matriz de rigidez em flexão clássica é:
K11 =
K12 =
K13 =
K14 =
16L y
3L3x
16L y
3L3x
8L y
3L3x
8L y
3L3x
K15 = −
K16 = −
K17 = −
K18 = −
+ν
4
16L
4
11
+ 3x + ν
+ 2 (1 − ν )
L xL y 3L y
L xL y
3L xL y
+ν
4
8L
4
1
+ 3x + ν
− 2 (1 − ν )
L xL y 3L y
L xL y
L xL y
+ν
4
8L
4
5
+ 3x + ν
− 2 (1 − ν )
L xL y 3L y
L xL y
3L xL y
+ν
4
16L
4
1
+ 3x + ν
− 2 (1 − ν )
L xL y 3L y
L xL y
L xL y
32L y
3L3x
− 2 (1 − ν )
8
3L xL y
16L x
8
8
8
−ν
−ν
+ 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
16L y
3L3x
+ 2 (1 − ν )
8
3L xL y
32L x
8
8
8
−ν
−ν
− 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
(6.49)
Curso de Estabilidade Estrutural
K 22 =
K 23 =
K 24 =
16L y
3L3x
8L y
3L3x
8L y
3L3x
K 25 = −
K 26 = −
K 27 = −
K 28 = −
K 33 =
K 34 =
4
16L
4
1
+ 3x + ν
− 2 (1 − ν )
L xL y 3L y
L xL y
L xL y
+ν
4
8L
4
5
+ 3x + ν
− 2 (1 − ν )
L xL y 3L y
L xL y
3L xL y
32L y
3L3x
16L y
3L3x
3L3x
K 38 = −
8
3L xL y
+ 2 (1 − ν )
8
3L xL y
16L x
8
8
8
−ν
−ν
+ 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
16L y
K 37 = −
− 2 (1 − ν )
32L x
8
8
8
−ν
−ν
− 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
3L3x
K 36 = −
4
16L
4
11
+ 3x + ν
+ 2 (1 − ν )
L xL y 3L y
L xL y
3L xL y
+ν
16L y
K 35 = −
+ν
+ν
4
16L
4
11
+ 3x + ν
+ 2 (1 − ν )
L xL y 3L y
L xL y
3L xL y
+ν
4
8L
4
1
+ 3x + ν
− 2 (1 − ν )
L xL y 3L y
L xL y
L xL y
16L y
3L3x
+ 2 (1 − ν )
8
3L xL y
32L x
8
8
8
−ν
−ν
− 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
32L y
3L3x
− 2 (1 − ν )
8
3L xL y
16L x
8
8
8
−ν
−ν
+ 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
129
130
K 44 =
Métodos dos Elementos Finitos em Estabilidade
16L y
3L3x
K 45 = −
K 46 = −
K 47 = −
K 48 = −
K 55 =
K 57 =
3L3x
4
16L
4
11
+ 3x + ν
+ 2 (1 − ν )
L xL y 3L y
L xL y
3L xL y
+ 2 (1 − ν )
8
3L xL y
16L x
8
8
8
−ν
−ν
+ 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
32L y
3L3x
− 2 (1 − ν )
8
3L xL y
32L x
8
8
8
−ν
−ν
− 2 (1 − ν )
3
L xL y
L xL y
3L xL y
3L y
3L3x
+ 2 (1 − ν )
16
3L xL y
16
16
+ν
L xL y
L xL y
32L y
3L3x
K 58 = ν
K 66 =
16L y
64L y
K 56 = ν
+ν
− 2 (1 − ν )
16
3L xL y
16
16
+ν
L xL y
L xL y
64L x
16
+ 2 (1 − ν )
3
3L xL y
3L y
K 67 = 0
K 68 =
K 77 =
32L x
16
− 2 (1 − ν )
3
3L xL y
3L y
64L y
3L3x
K 78 = ν
K 88 =
+ 2 (1 − ν )
16
3L xL y
16
16
+ν
L xL y
L xL y
64L x
16
+ 2 (1 − ν )
3
3L xL y
3L y
Considerando Lx = Ly = L e ν = 0,25, a matriz de rigidez clássica se torna:
Curso de Estabilidade Estrutural
131
109 36 29 51 −88 −32 −8 −112
−32
109 36 29 −88 −112 −8
109 51 −8 −112 −88 −32
−8 −88 −88
109 −8
1
[k ] = 2
176
48
16
48
6L
sim
176
0
16
176
48
176
(6.50)
Exemplo: Determine a carga crítica de uma placa bi-apoiada e x = 0 e x = L se E =
200GPa, ν = 0,25 e h = 10 mm.
1
6L2
109 36 29 51 −88 −32 −8 −112
−32
109 36 29 −88 −112 −8
109 51 −8 −112 −88 −32
−8 −88 −88 Nx0
109 −8
−
176
48
16
48 D
sim
176
0
16
176
48
176
52 84 230
52 17
52
1
90
sim
17
23
28
52
−80 −6
−80 6
−40 6
−40 −6
160 0
48
−40 6 w1
−40 −6 w 2
−80 −6 w 3
−80 6 w 4
=0
80
0 w5
0
−48 w 6
160
0 w7
48 w 8
As condições de contorno do problema são: w1 = w2 = w3 = w4 = w6 = w8 = 0.
Logo o sistema de equações se reduz a:
1 176 16 Nxy0 160 80 w1
2
−
= 0
6L 16 176 90D 80 160 w 2
Chamando de λ = Nx0
6L2
:
90D
132
Métodos dos Elementos Finitos em Estabilidade
16 (11 − 10λ ) 16 (1 − 5λ )
=0
16 (1 − 5λ ) 16 (11 − 10λ )
O polinômio característico fazendo o determinante da matriz igual a zero é:
75λ 2 − 210λ + 120 = 0
As raízes do polinômio são λ1 = 0,8 e λ2 = 2. Logo, a menor carga crítica é:
λ = Nx0
Nx0
6L2
= 0,8
90D
12 Eh3
= 2
= 213,3 N / mm
L 12 1 − ν 2
(
)
O valor correto da carga crítica é:
Nx0 =
Eh3
π2
= 175, 5 N / mm
L2 12 1 − ν 2
(
)
O valor obtido pelo software Ansys com 1 elemento é 205,1 N/mm.
Curso de Estabilidade Estrutural
133
A – MÉTODOS VARIACIONAIS
A resolução de problemas de mecânica estrutural é conseguida basicamente
pela solução de equações diferenciais de equilíbrio, as quais são obtidas por um
método vetorial (soma de forças e de momentos) ou por um método energético. Nos
métodos energéticos, nem sempre familiares, considera-se que o sistema está em
equilíbrio se sua energia potencial total está estacionária e, o equilíbrio é estável se
a energia potencial tem um mínimo relativo.
A energia potencial é colocada como sendo a soma da energia de
deformação do corpo U, com a energia potencial das forças externas atuantes neste
corpo, Ω.
V = U+Ω
(A.1)
Se por exemplo, a energia potencial total é função de um deslocamento w(x)
= wo, deseja-se saber se o sistema estará em equilíbrio nesta configuração, ou seja,
se V está estacionaria. E, para que o equilíbrio seja estável, V deverá ter um mínimo
relativo. Para determinar isso, é preciso examinar a variação da energia potencial
total ∆V devido ao acréscimo no deslocamento da seguinte forma:
w = w o + w1
(A.2)
onde w1 é um deslocamento arbitrário e pequeno.
Devido a esse acréscimo de deslocamento, a energia potencial total será
então da forma:
dV(w o )
1 dV 2 (w o ) 2 1 dV 3 (w o ) 3
V + ∆V = V +
w1 +
w1 +
w1 +
dw
2! dw 2
3! dw 3
(A.3)
onde a variação da energia potencial total ∆V é colocada como uma expansão da
séria de Taylor.
O termo de primeira ordem em w1 na eq. (A.3) é dito, primeiro variacional de
V, e é simbolizado como δV. O termo de segunda ordem em w1 na eq. (A.3) é dito,
segundo variacional de V, e é simbolizado como δ2V. Assim, a variação da energia
potencial total é colocada sob a forma:
134
Métodos Variacionais
∆V = δV +
1 2
1
δ V + δ3 V +
2!
3!
(A.4)
Portanto, para a estacionaridade de V (equilíbrio do sistema), o primeiro
variacional de V deve ser nulo:
δV = 0
ou seja
dV(w o )
=0
dw
(A.5)
e para um mínimo relativo (estabilidade do sistema), o segundo variacional de V
deve ser não negativo:
1 2
δ V≥0
2!
ou seja
dV 2 (w o )
≥0
dw 2
(A.6)
A.1 – Métodos Variacionais em Sistemas Contínuos
Considere um como exemplo, uma viga em balanço sujeita à uma carga
uniformemente distribuída, Fig. A.1.
z
q(x)= –qo
x
L
Figura A.1 – Viga em balanço sujeita a uma carga uniformemente distribuída
As condições de contorno do problema são colocadas como sendo:
w = w' = 0
w '' = w ''' = 0
em
em
x=0
x =L
(A.7)
onde as condições de contorno em x = 0 são ditas forçadas, e em x = L são ditas
naturais.
A energia potencial das cargas aplicadas Ω, é equivalente ao trabalho
realizado por essas cargas:
Curso de Estabilidade Estrutural
135
L
Ω = ∫ q w dx
(A.8)
0
e a energia de deformação para esse carregamento transversal considerado é:
L
U=
EI
( w '' )2 dx
∫
20
(A.9)
Então, a energia potencial total é:
L
2
EI
V = ∫ ( w '' ) + q w dx
2
0
(A.10)
O integrante da eq. (A.10), chamado de funcional, é da forma:
F=
EI
2
( w '' ) + q w
2
(A.11)
Para se verificar o equilíbrio e a estabilidade do sistema, deve-se examinar a
variação da energia potencial total devido a uma variação de deslocamento colocado
como na eq. (A.2), sendo que, w1 = ε ζ(x), onde ε é uma constante arbitrária
pequena e ζ(x) é uma função admissível e arbitrária (é contínua e derivável duas
vezes no intervalo de análise, 0 < x < L, e satisfaz à todas as condições de
contorno). Assim, a energia potencial total será da forma:
L
2
EI
V + ∆V = ∫ ( w o ''+ ε ζ '' ) + q ( w o + ε ζ ) dx
2
0
(A.12)
Desenvolvendo a eq. (A.12) e reagrupando os termos, a variação da energia
potencial total ∆V tem a forma:
L
∆V = ε ∫ (EIw o '' ζ ''+ q ζ ) dx + ε 2
0
L
EI
( ζ '' )2 dx
∫
20
(A.13)
Colocando a eq. (A.13) de uma forma mais compacta:
∆V = δV +
1 2
δ V
2!
(A.14)
136
Métodos Variacionais
onde o primeiro variacional de V é:
L
δV = ε ∫ (EIw o '' ζ ''+ q ζ ) dx
(A.15)
0
e o segundo variacional de V é:
L
1 2
EI
2
δ V = ε2 ∫ ( ζ '' ) dx
2!
20
(A.16)
Para ε suficientemente pequeno, δV > δ2 V . Para que V tenha um mínimo
relativo, é necessário que δV = 0. Para sistemas contínuos, esta é a condição
necessária de estacionaridade de V.
Para δV = 0 e ε arbitrário, tem-se :
L
∫ (EIw o '' ζ ''+ q ζ ) dx = 0
(A.17)
0
A primeira integral na eq. (A.17) pode ser resolvida por integração por partes,
conforme expressão dada pela eq. (A.18), onde as funções u(x) e v(x) são contínuas
no intervalo x1 ≤ x ≤ x2.
x2
x2
∫ (u.v ' ) dx = [u.v ]x1 − ∫ (u'.v ) dx
x2
x1
(A.18)
x1
Aplicando a eq. (A.18) na eq. (A.17), e observando que a função ζ(x) deve
satisfazer as condições de contorno, a expressão resultante é da forma apresentada
pela eq. (A.19):
EI[ w o ''(L) ζ '(L) − w o ''(0) ζ '(0)] − EI[ w o '''(L) ζ(L) − w o '''(0) ζ(0)]
L
(
)
+ ∫ EIw o + q ζ dx = 0
0
iv
(A.19)
Aplicando as condições de contorno dadas pelas eqs. (A.7), a eq. (A.19) se
reduz a:
Curso de Estabilidade Estrutural
L
∫ (EIw o
iv
137
)
+ q ζ dx = 0
0
(A.20)
Para que a eq. (A.20) seja zero, e considerando que a função ζ(x) é arbitrária
e não nula, o fator
(EIw
iv
o
+q
)
deverá ser nulo no intervalo 0 ≤ x ≤ L.
Conseqüentemente:
EIw oiv = −q = qo
(A.21)
A eq. (A.21) fornece a equação diferencial de equilíbrio, obtida da condição de
estacionaridade de V, ou seja, δV = 0. Observa-se que δ2V é positivo para qualquer
função arbitrária ζ(x). Logo a configuração em wo é estável.
A.2 – Equações de Euler
Assim como na eq. (A.10), o integrante F pode ser colocado como uma
função de uma variável independente x, de uma variável dependente w e de sua
derivadas.
V=
x1
∫ F(x,w,w ',w '') dx
(A.22)
x0
Para uma variação de deslocamento na forma da eq. (A.2), a energia
potencial final é da forma:
V + ∆V =
x1
∫ F(x,w + ε ζ,w '+ ε ζ ',w ''+ ε ζ '') dx
(A.23)
x0
ou seja:
∆V =
x1
∫ [F(x,w + ε ζ,w '+ ε ζ ',w ''+ ε ζ '') − F(x,w,w ',w '')] dx
(A.24)
x0
A expressão do integrante em uma série de Taylor para a primeira variação
tem a forma:
138
Métodos Variacionais
x1
∂F
∂F
∂F
δV = ε ∫
ζ+
ζ '+
ζ '' dx
∂w o
∂w o '
∂w o ''
x0
(A.25)
onde ∂F/∂wo representa ∂F/∂w para w = wo, etc. Novamente, para V estar em
equilíbrio, δV = 0. Como ε é arbitrário, tem-se que:
x1
∂F
∂F
∂F
∫ ∂w o ζ + ∂w o ' ζ '+ ∂w o '' ζ '' dx = 0
(A.26)
x0
Integrando por partes a eq. (A.26) e impondo as condições de contorno,
lembrando que a função ζ(x), satisfaz as condições de contorno, a expressão
resultante tem a forma (ver eq. (A.20)):
x1
∂F
d ∂F
d2 ∂F
∫ ∂w o − dx ∂w o ' + dx2 ∂w o '' ζ dx = 0
x0
(A.27)
e, assim como anteriormente:
d ∂F
d2 ∂F
∂F
−
+ 2
=0
∂w o dx ∂w o ' dx ∂w o ''
xo ≤ x ≤ x1
(A.28)
A eq. (A.28) é conhecida como a equação de Euler para o cálculo dos
variantes.
Para ilustrar a aplicação da equação de Euler, basta aplicar a eq. (A.28) na
expressão do integrante, eq. (A.11). A expressão resultante é a eq. (A.21), onde
∂F/∂w = q, ∂F/∂w’ = 0 e ∂F/∂w’’ = Eiw’’.
Para o caso do funcional F ser uma função de uma variável independente x,
de duas variáveis dependentes, u(x) e w(x), e das derivadas de primeira ordem de u
e de primeira ordem e segunda ordem em w, a aplicação das equações de Euler
fornecem:
∂F d ∂F
−
=0
∂u dx ∂u'
∂F d ∂F
d2 ∂F
−
+ 2
=0
∂w dx ∂w ' dx ∂w ''
(A.29)
Curso de Estabilidade Estrutural
139
Para o caso do funcional F ser função de duas variáveis independentes x e y,
de três variáveis dependentes u(x,y), v(x,y) e w(x,y), e das derivadas de primeira
ordem de u e v, e de primeira e segunda ordem em w, a aplicação das equações de
Euler fornecem:
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂u ∂x ∂u,x ∂y ∂u,y
∂F ∂ ∂F
∂ ∂F
−
−
=0
∂v ∂x ∂v,x ∂y ∂v,y
(A.30)
∂F ∂ ∂F
∂ ∂F
∂ 2 ∂F
∂ 2 ∂F
∂ 2 ∂F
−
−
+ 2
+
+ 2
=0
∂w ∂x ∂w,x ∂y ∂w,y ∂x ∂w,xx ∂x∂y ∂w,xy ∂y ∂w,yy
A.3 –Critério de Trefftz
As equações de Euler representam o critério de estacionaridade de V, ou
seja, δV=0. Já a estabilidade do sistema depende do sinal do segundo variacional de
V, δ2V≥0. A carga crítica que determina a estabilidade de um sistema é a menor
carga para o qual δ2V deixa de ser positivo. Para esta carga o equilíbrio muda de
estável para instável.
Considere como exemplo uma coluna sujeita a uma carga compressiva P. Na
inimência da coluna se tornar instável, a energia potencial total pode ser escrita
como:
V = UM + UF + Ω
(A.31)
onde UM e UF são energias de deformação de membrana e de flexão, e Ω é a
energia potencial das forças aplicadas. As expressões das energias de deformação
elástica ( σ = E ε ), são da forma:
L
UM =
EA 2
ε dx
2 ∫0
L
EI
2
UF = ∫ ( w '' ) dx
20
onde ε é a deformação extensional colocada da forma:
(A.32)
140
Métodos Variacionais
ε = u'+
1
2
( w ')
2
(A.33)
A energia potencial da carga aplicada P é:
Ω = P [u(L) − u(0)] = P.u o
L
(A.34)
A eq. (A.33) pode ser escrita, usando a regra da integração por partes, eq.
(A.18), como:
L
Ω = P ∫ u' dx
(A.35)
0
Introduzindo as eqs. (A.32) e (A.35) na eq. (A.31), a expressão de V resulta
em:
2
EA
1 2 EI
2
V = ∫
u'+ w ' + ( w '' ) + P u' dx
2
2
2
0
L
(A.36)
A expressão do segundo variacional de V é obtido fazendo:
u → uo + u1
w → w o + w1
(A.37)
onde uo e wo são os deslocamentos da coluna antes da ocorrência da instabilidade,
e u1 e w1 são deslocamentos incrementais pequenos necessários para que ocorra a
instabilidade.
Introduzindo a eq. (A.37) na eq. (A.36), tem-se:
2
EA
1
EI
2
2
V + ∆V = ∫
u
'
u
'
w
'
w
'
w
''
w
''
P
u
'
u
'
+
+
+
+
+
+
+
dx
(
)
(
)
(
)
o
1
o
1
o
1
o
1
2
2
2
0
L
(A.38)
Para a configuração da coluna antes da ocorrência da instabilidade, (coluna
totalmente reta), sabe-se que:
w o = w o ' = w o '' = 0
Substituindo (A.39) na eq. (A.38) e desenvolvendo:
(A.39)
Curso de Estabilidade Estrutural
EA 2
1
2
2
2
4
2 uo ' + 2uo 'u1 '+ u1 ' + uo ' w1 ' + u1 ' w1 ' + 4 w1 ' +
dx
V + ∆V = ∫
2
0 EI
2 w1 '' + P ( uo '+ u1 ' )
141
L
(A.40)
Na eq. (A.40) há termos associados à configuração inicial, V(uo’), há termos
pertencentes ao primeiro variacional, δV(u1’ e w1’), termos pertencentes ao segundo
variacional, δ2V (u1’2, w1’2 e u1’ w1’) e termos de ordem superior. Desta forma, o
segundo variacional é:
L
(
)
1 2
EI
EA
u1 '2 + uo ' w1 '2 + w1 ''2 dx
δ V = ∫
2
2
2
0
(A.41)
O deslocamento axial pode ser colocado da forma:
uo = −
P
x
EA
(A.42)
Substituindo a derivada da eq. (A.42) na eq. (A.41), o segundo variacional de
V pode ser colocado como:
L
1 2
1
2
2
2
δ V = ∫ EA ( u1 ' ) + EI ( w1 '' ) − P ( w1 ' ) dx
2
20
(A.43)
O valor da carga crítica de P é o menor valor para o qual δ2V deixa de ser
positivo. Este limite de δ2V ser definido positivo é o chamado Critério de Trefftz.
Portanto, para pequenos valores de P, δ2V > 0 para qualquer variação de u1(x) e
w1(x) não nulas. E, para grandes valores de P, δ2V < 0 para algumas variações de
u1(x) e w1(x).
As equações de estabilidade são então obtidas impondo a estacionaridade de
δ2V, ou seja:
(
)
δ δ2 V = 0
(A.44)
Aplicando as equações de Euler no funcional F do segundo variacional, δ2V,
tem-se:
142
Métodos Variacionais
∂F
d ∂F
−
=0
∂u1 dx ∂u1 '
(A.45)
∂F
d ∂F
d2 ∂F
−
+ 2
=0
∂w1 dx ∂w1 ' dx ∂w1 ''
onde F é:
F = EA ( u1 ' ) + EI ( w1 '' ) − P ( w1 ' )
2
2
2
(A.46)
Aplicando as eqs. (A.45) no funcional dado pela eq. (A.46) e simplificando, as
equações resultantes são:
u1 '' = 0
(A.47)
iv
EIw1 + P w1 ' = 0
A eq. (A.47b) é a equação diferencial para a determinação da carga crítica de
colunas. Portanto, o critério para avaliar a perda de estabilidade é representado pela
aplicação das equações de Euler no segundo variacional δ2V.
Sabe-se que a elongação em uma barra pode ser obtida por:
∆u =
NL
AE
(A.48)
Assim, o esforço axial interno pode ser colocado como:
N = AE
∆u
= AEε
L
(A.49)
A derivada da eq. (A.49) representa:
N' = A E ε ' = A E
d2u
dx 2
= A Eu''
Logo, a eq. (A.47a) é equivalente a eq. (1.9a).
(A.50)
Baixar