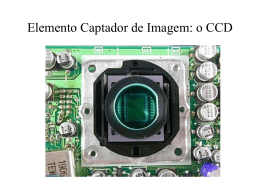
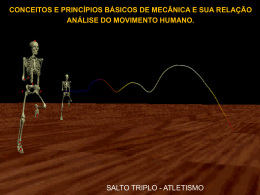
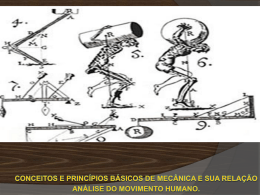
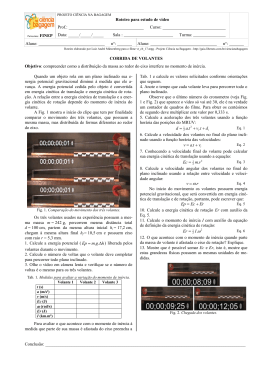
Prof. Hans-Ulrich Pilchowski Capítulo IV Satélites Artificiais – Movimento de Atitude INSTITUTO NACIONAL DE PESQUISAS ESPACIAIS - INPE Satélites Artificiais - Movimento de Atitude Aulas de 04/06/11de10/2011 Código: CMC –316 - 4 Introdução, atitude e movimento em atitude HANS-ULRICH PILCHOWSKI CAPÍTULO IV ROTORES 23 Prof. Hans-Ulrich Pilchowski Notas de Aula Rotores Introdução O controle de atitude e de estabilização de satélites, para manter a atitude desejada, em muitos casos envolve um ou mais rotores, e motores, controlados associados. Os rotores, em satélites, têm duas finalidades clássicas, ou seja: como mecanismo que controla o satélite gerando torques ou como mecanismos que estocam um momento angular predeterminado para manter a estabilidade do satélite. Rodas de reação (reaction wheel) Roda de reação em um eixo A essência da roda de reação (o que é válido também para o volante de inércia) pode ser ilustrada por um exemplo simples, o de um aro circular fino de raio R, que gira em torno de um eixo normal ao plano do aro e o qual passa pelo centro do círculo. Nestas condições, toda a massa M do aro é eqüidistante do eixo, de modo que o módulo do r Momento Angular L é dado por L = M .R.v = M .R 2 .ω . (4.1) r Como todos os pontos do aro se movem com a mesma velocidade R.ω , tem-se que M . R 2 é uma propriedade do aro, denominado Momento de Inércia do aro, isto é, I = M . R 2 , donde o momento angular terá o valor r r L = I .ω . (4.2) Para estocar um momento angular predeterminado, que mantenha o movimento de atitude estável em relação a rotações sobre eixos perpendiculares ao eixo de rotação do rotor, neste caso denominado volante de inércia (momentum wheel). Trata-se de discos girantes desenvolvidos para operar com “momento angular não nulo", e com capacidade de estocar este momento angular em torno de seu eixo de rotação, normalmente fixo em relação ao satélite. Um sistema de controle baseado em volantes de inércia pode ter 1, 2 ou 3 volantes, alinhados com os três eixos principais de inércia, e além destes podem haver diversos volantes ao longo de eixos não ortogonais para manter o momento angular dos volantes e do satélite na presença de torques perturbadores. Normalmente, o sistema requer um controle ativo secundário para manter o momento angular, tanto dos volantes quanto do satélite. Os sistemas, baseados em volantes de inércia, mantém a atitude do satélite através da troca de momento angular entre satélite e volante, assim estabilizando o satélite. Quando um torque age sobre o satélite, os volantes de inércia reagem, absorvendo o torque e consequentemente mantendo a atitude deste. Desta forma, a velocidade de rotação do volante cresce ou decresce, modificando o seu momento angular, porém em um período completo de torques cíclicos a velocidade de rotação do volante se mantém constante, isto é, a velocidade de rotação final, de um ciclo, é igual à inicial. Já no caso de torques 24 Prof. Hans-Ulrich Pilchowski Capítulo IV Satélites Artificiais – Movimento de Atitude provocados por perturbações seculares a velocidade de rotação do volante cresce ou decresce monotonicamente até o volante alcançar uma velocidade de rotação próxima de seus limites operacionais. Quando isto acontece, o volante deve ser reconduzido à velocidade de rotação nominal de operação através do sistema de controle secundário. Um caso comum de aplicação de volantes de inércia é aquele no qual o satélite é estabilizado por dupla rotação (dual - spin), como mostra a Figura 4.1. Trata-se de um satélite que contém apenas um volante de inércia, e cujo eixo de simetria está alinhado com um dos eixos principais de inércia, normalmente aquele coincidente com o eixo de rotação do satélite. Note-se que, desde que a rotação do volante não redistribui massa, os principais eixos de inércia, se mantém invariantes com respeito ao movimento do volante. Assim, supondo que não haja deslocamento do volante em relação ao centro de massa do satélite, o momento angular do sistema é dado por: r r r L = Lsat + Lrot , (4.3) r r onde Lsat e Lrot são os momentos angulares do satélite e do volante (rotor) respectivamente. Note-se que r Lsat = I xxsat .ω x . i$ + I yysat .ω y . $j + I zzsat .ω z . k$ (4.4) r r rot Lrot = I xxrot .ω x . i$ + I yy . ω y + Ω . $j + I zzrot . ω z . k$ ( onde I e I ) são as componentes dos momentos principais de inércia, I sat e I rot , do r satélite e do volante de inércia respectivamente, ω a velocidade de rotação do satélite e r Ω a velocidade de rotação do volante. sat nn rot nn Z Jatos de gás de controle de rolamento e guinada Volante de inércia de arfagem k$ $j Y i$ Sensor de horizonte X Fig. 4.1 - Uma configuração de satélite de dupla rotação (dual - spin) 25 Jatos de controle de arfagem Prof. Hans-Ulrich Pilchowski Notas de Aula Rotores Substituindo-se as Equações 4.4 na Equação 4.3, tem-se: r r L = ( I xxsat + I xxrot ).ω x . i$ + I yysat + I yyrot .ω y + I yyrot . Ω . $j + ( I zzsat + I zzrot ).ω z . k$ , (4.5) [( ] ) fazendo-se as seguintes substituições, I xx = Ixxsat + I xxrot (4.6) I yy = I yysat + I yyrot I zz = I zzsat + I zzrot , tem-se: r r L = I xx .ω x .iˆ + ( I yy .ω y + I yyrot .Ω). ˆj + I zz .ω z .kˆ , (4.7) Como o movimento rotacional sobre o centro de massa de um corpo pode ser tratado independentemente do movimento da translação do centro de massa, pode-se escrever as equações do movimento rotacional na forma a seguir: r dL r r r = N −ω × L ⇒ dt r r dL r r r r r r N= + ω × L ⇒ N = I ω& + ω × L . dt (4.8) Tendo em vista que os eixos do satélite foram considerados coincidentes com os principais eixos de inércia, como se verifica pela Equação 4.7, pode utilizar-se as equações do movimento rotacional de Euler, isto é, r r r r r r N = I ω& + ω × (I ω ) + ω × I yyrot Ω ( ) (4.9) onde I é o tensor momento de inércia, com os produtos de inércia nulos, isto é, I xx I= 0 0 0 I yy 0 0 0 I zz 0 e I rot yy 0 = 0 I yy 0 0 0 0. 0 Então as equações do movimento rotacional do satélite são: i) para o rolamento: r & x + I zz − I yy ω y ω z + I rot N x = I xx ω yy Ω ω z ( ) ii) para a guinada: 26 (4.10) Prof. Hans-Ulrich Pilchowski Capítulo IV Satélites Artificiais – Movimento de Atitude r& N y = I yy ω& y + ( I xx − I zz )ω z ω x + I yyrot Ω (4.11) iii) para a arfagem: r & x + I yy − I xx ω x ω y + I rot N z = I zz ω yy Ω ω x ( ) Uma maneira simples, para fixar o torque u (t ) a ser aplicado ao volante de inércia, pelo motor, é igualá-lo à derivada no tempo do momento angular no eixo Y do volante. Assim obtém-se a seguinte expressão: r& u (t ) = I yyrot ω& y + I yyrot Ω (4.12) r rot & . Ω , e substituindo h& da Expressão 4.12 na 2a das Equações 4.11, obtémfazendo h& = I yy se uma nova equação do movimento rotacional para a guinada, isto é, N y = I yysat ω& y + ( I xx − I zz ).ω z .ω x + u( t ) . (4.13) Substituindo a aceleração da velocidade angular ω& y da Equação 4.13 na Expressão 4.12 obtém-se a forma final da Equação do movimento rotacional para o volante de inércia, ou seja, h& = I yy sat I yy u( t ) − rot I yy sat I yy Ny + I rot yy sat I yy ( I xx − I zz ).ω z .ω x , (4.14) em função do torque de guinada e do torque aplicado ao volante pelo motor de rotação controlada. Note-se que neste caso a energia total do sistema é dada por: E= 1 2 (I xx .ω x2 + I yy .ω y2 + I zz .ω z2 + I yyrot .Ω 2 + 2.I yyrot .ω y Ω ) (4.15) Derivando esta equação no tempo, tem-se a equação da Energia do sistema, isto é, E& = N x .ω x + N y .ω y + N z .ω z + I yysat .Ω.u (t ) , (4.16) r& r onde ω& e Ω foram substituídos utilizando as Equações 4.11 e 4.14. Desta operação r r pode-se concluir que a energia total é constante quando o torque N y = 0 e ou ( Ω = 0 ou u( t ) = 0). Quando o torque N y = 0 , implica que o volante não esta girando, porém qualquer uma das outras condições implicam em giro-livre (free-wheeling) do volante. 27 Prof. Hans-Ulrich Pilchowski Notas de Aula Rotores Rodas de reação (reaction wheels) são mecanismos que contém um volante cuja rotação é ativada e mantida por um motor de rotação controlada, podendo girar tanto no sentido dos ponteiros do relógio quanto no sentido contrário, podendo variar sua velocidade nos dois sentidos (HUGHES, 1986), por exemplo: de -30.000 a +30.000 rpm. Assim como no giroscópio o princípio da roda de reação está baseado no fato de que um volante com certa velocidade angular tende a manter sempre a mesma orientação no espaço inercial, mesmo que o satélite onde ele está contido mude de atitude. Porém, como o eixo de rotação da roda não tem liberdade de movimento por estar fixo ao corpo do satélite, haverá uma reação por parte desta ao se modificar a atitude tendendo a aumentar ou diminuir sua velocidade de rotação. Assim ao se modificar a velocidade de rotação do volante o satélite também irá reagir com uma mudança de atitude, ou seja, uma mudança de velocidade da rotação da roda de reação aplica um torque sobre a nave. Rodas de reação em três eixos Um sistema de controle de rodas de reação normalmente tem três ou quatro rodas, além de requerer um sistema secundário de controle baseado em jatos de gás ou em bobinas magnéticas. Quando o sistema é composto por três rotores cada um deles passa a ser responsável pelo controle da orientação de um dos três eixos de referência do satélite, como mostra a Figura 4.2. rotor controlador do eixo de guinada rotor controlador do eixo de rolamento eixo de rolamento eixo de eixo de guinada X rotor controlador do eixo de arfagem arfagem Z Y Fig.4.2 - Configuração de um sistema de controle com três rodas de reação . 28 Prof. Hans-Ulrich Pilchowski Capítulo IV Satélites Artificiais – Movimento de Atitude Todo sistema de controle de rodas de reação necessita de um sistema secundário pelo fato de que as velocidades dos rotores são limitadas, tanto para a esquerda quanto para a direita. Quando uma roda atinge a velocidades angular máxima diz-se que ela está saturada, pois não pode mais aumentar a velocidade naquele sentido e portanto não pode produzir mudança na atitude da nave quando for necessário aumentar a velocidade angular. Neste caso utiliza-se o sistema de controle secundário para desaturar a roda, isto é, um jato de gás ou uma bobina magnética deve aplicar um torque contrário ao satélite de forma que a desaceleração do volante se contraponha a esta mantendo a atitude estável, e levando a velocidade angular da roda para próximo de zero. Um sistema de controle baseado em quatro rodas de reação onde as quatro irão controlar os três eixos de referência simultaneamente. Neste caso os rotores normalmente estão em uma posição relativa como se estivessem incrustadas nas faces de uma pirâmide, como mostra a Figura 4.3. eixo de arfagem eixo de guinada eixo de rolamento Fig.4.3 - Sistema de controle com quatro rodas de reação. Supondo utilizar as roda de reação (reaction wheel) como mecanismos que controlem a atitude do satélite gerando torques, aplica-se, por meio de um motor elétrico, um torque ao rotor, que faz surgir um torque de mesma intensidade sobre o satélite, em sentido oposto. Trata-se de um disco girante, com eixo de rotação fixo ao corpo do satélite, de forma a operar com "momento angular nulo", tendo a finalidade de agir ativamente sobre a atitude e também de absorver pequenos torques devido a perturbações através de um sistema de controle ativo para manter a estabilidade em três eixos. A Figura 4.4 mostra um sistema usual de rotores utilizados no controle de atitude ativo de um satélite, no caso os rotores podem representar tanto rodas de reação quanto volantes de inércia. 29 Prof. Hans-Ulrich Pilchowski Notas de Aula Rotores Estes sistemas utilizam giroscópios e acelerômetros para observar e informar qualquer movimento de rotação do satélite aos motores de velocidade controlada (torque motores) acoplados a cada roda de reação. Os motores de rotação controlada aplicam um torque compensador a cada rotor, efetivamente absorvendo os torques perturbadores do sistema. Assim, o vetor momento angular desvia lentamente, mas efetivamente a atitude permanece fixa no espaço inercial. Quando as rodas de reação estão próximas da saturação, o momento angular é reajustado utilizando jatos de gás ou bobinas magnéticas. Rotor controlador da guinada Rotor controlador do rolamento Propulsores de desaturação X $j i$ Eixo normal à órbita k$ Z Eixo na direção da velocidade Y Rotor controlador da arfagem Fig. 4.4 - Configuração Simples de um Sistema de Controle de Atitude em três Eixos (WERTZ, 1978). Para obter as equações do movimento da configuração apresentada na Figura 4.2, o sistema é considerado constituído de três rodas de reação idênticas. As equações do movimento são desenvolvidas a partir de princípios básicos, isto é, o momento angular do sistema é dado por r r r L = Lsat + Lrot ou seja, r L = I xxsat ω x iˆ + I yysat ω y ˆj + I zzsat ω z kˆ + I xxrotx (ω x + Ω x )iˆ + I yyrotx ω y ˆj + I zzrotx ω z kˆ + I xxroty ω x iˆ + I yyroty (ω y + Ω y ) ˆj + I zzroty ω z kˆ + I xxrotz ω x iˆ + I yyrotz ω y ˆj + I zzrotz (ω z + Ω z )kˆ . (4.17) 30 Prof. Hans-Ulrich Pilchowski Capítulo IV Satélites Artificiais – Movimento de Atitude Como as rodas foram consideradas idênticas e simétricas, tem-se: I xxrotx = I yyroty = I zzrotz = I ax e I yyrotx = I zzrotx = I xxroty = I zzroty = I xxrotz = I yyrotz = I tr onde I ax é o momento de inércia axial e I tr é o momento de inércia transversal, donde a Expressão 4.17 pode ser rescrito como segue: r L = ( I xxsat + I ax + 2 I tr )ω x i$ + ( I yysat + I ax + 2 I tr )ω y $j + ( I zzsat + I ax + 2 I tr )ω z k$ + ( I ax Ω x i$ + Ω y $j + Ω z k$ ) (4.18) Adotando: I ii = I iisat + I ax + 2 I tr , para ii = xx , yy , zz hi = I ax Ω i , para i = x , y , z , e tem-se: r L = ( I xx ω x + h x ) i$ + I yy ω y + h y $j + ( I zz ω z + hz ) k$ ( ) (4.19) Pela Equação de Euler do movimento rotacional obtém se as equações do movimento, rotacional, do satélite, ou seja: ( ) ( ) ( ) N x = I xx ω& x + h&x + (I yy ω y + h y )ω z − (I zz ω z + hz )ω y N y = I yy ω& y + h& y + (I zz ω z + hz )ω x − (I xx ω x + hx )ω z (4.20) N z = I zz ω& z + h&z + (I yy ω y + h y )ω x − (I xx ω x + hx )ω y . As equações do movimento de cada uma das rodas de reação são determinadas através dos torques aplicados pelos motores de rotação controlada, isto é, & x + h& x u x (t ) = I ax ω & y + h& y u y (t ) = I ax ω (4.21) & z + h& z u z (t ) = I ax ω 31 Prof. Hans-Ulrich Pilchowski Notas de Aula Rotores Obtendo-se h& x , h& y , h& z das Expressões 4.21 e hx , h y , hz substituindo-os nas Equações 4.20, tem-se: N x = (I xx − I ax )ω& x + (I zz − I yy )ω y ω z + hz ω y − h y ω z + u x (t ) N y = (I yy − I ax )ω& y + (I xx − I zz )ω z ω x + h x ω z − hz ω x + u y (t ) (4.22) N z = (I zz − I ax )ω& z + (I yy − I xx )ω x ω y + h y ω x − hx ω y + u z (t ) Finalmente, obtém-se as equações do movimento das rodas de reação através da substituição das acelerações ω& x , ω& y e ω& z , das velocidades de rotação do satélite, retiradas das Equações 4.22 nas Equações 4.21, isto é: h&x = I ax (I zz − I yy )ω yω z + hzω y − h yω z − N x + I xx u x (t ) I xx − I ax I xx − I ax h& y = I I ax (I xx − I zz )ω z ω x + hxω z − hz ω x − N y + yy u y (t ) I yy − I ax I yy − I ax h&z = I ax (I yy − I xx )ω xω y + h yω x − hxω y − N z + I zz u z (t ) I zz − I ax I zz − I ax [ ] [ ] [ (4.23) ] As soluções podem ser determinadas por meio de algoritmo numérico iterativo, ou então utilizando as Equações 4.20 e 4.21, juntamente com as quatro equações dos parâmetros cinemáticos de Euler, que não serão tratadas neste texto, constituem um sistema de dez equações não lineares. Note-se que os rotores podem ser utilizados, tanto para efetuar transferência de momento angular com a finalidade de estabilizar a atitude do satélite (volantes de inércia), quanto para efetuar manobras em atitude (rodas de reação). Nos dois casos as equações de movimento rotacional do sistema serão basicamente as mesmas. Volante de Inércia (momentum wheel) Volantes de inércia são mecanismos que contém um volante cuja rotação é ativada e mantida por um motor de rotação controlada, girando em um só sentido, podendo variar sua velocidade angular entre 0 e uma velocidade máxima, por exemplo: de 0 a 60.000 rpm . 32 Prof. Hans-Ulrich Pilchowski Capítulo IV Satélites Artificiais – Movimento de Atitude Assim como na roda de reação o princípio do volante de inércia está baseado no fato de que um volante girando mantém a mesma orientação no espaço inercial. Porém, a finalidade do volante de inércia é manter a atitude atual do satélite, e não de fazer manobras, que é finalidade da roda de reação. Desta forma, quando o satélite sofre um torque externo, o que modifica sua atitude, o volante aumenta ou diminui sua velocidade de rotação opondo-se a este, e mantendo a atitude da espaçonave estável (JUNKINS & TURNER, 1986). Um caso típico, são os satélites estabilizados por dupla rotação, onde o satélite propriamente dito tem uma certa velocidade angular, baixa ou nula, e agregado um volante com velocidade angular alta, que mantém a estabilidade deste, como mostra a Figura 4.5. eixo de rotação corpo do satélite Volante de inércia Fig. 4.5 - Satélites estabilizados por dupla rotação por volantes de inércia. 33
Baixar