1
UNIVERSIDADE ESTADUAL DE GOIÁS
Unidade Universitária de Ciências Exatas e Tecnológicas
Curso de Licenciatura em Matemática
Equações Diferenciais Aplicadas em Sistemas Mecânicos e Elétricos Simples
Rafael Andrade Ferreira
ANÁPOLIS
2012
2
Rafael Andrade Ferreira
Equações Diferenciais Aplicadas em Sistemas Mecânicos e Elétricos Simples
Trabalho de Curso apresentado a Coordenação
Adjunta de TC, como parte dos requisitos para
obtenção do título de Graduado no Curso de
Licenciatura em Matemática da Universidade
Estadual de Goiás sob a orientação do
Professor Dr. José de Souza Sales.
ANÁPOLIS
2012
3
4
DEDICATÓRIA
Dedico este trabalho aos meus pais, meu irmão, ao meu “neném” que está por vir e
sua maravilhosa mãe, meus amigos, primos, colegas de classe, e a todos os professores que já
lecionaram em minha carreira escolar e acadêmica, dedico também com muito carinho a
minha professora Msc. Cinthya Maria de Pina Luchetti que me orientou no início do meu
trabalho de curso, dedico também a todos que ainda passarão por esta experiência.
5
AGRADECIMENTOS
Agradeço a Deus, pelos planos que fez para minha vida mesmo antes que eu
nascesse, por ter me concedido a vida por intermédio das pessoas mais incríveis, maravilhosas
e importantes desse mundo, meus pais, e a estes agradeço pela dedicação, carinho, afeto,
força, companheirismo, paciência e amor verdadeiro que somente eles têm por mim. Cito aqui
o nome destes heróis que deixaram de viver para me proporcionar a vida: a mulher mais linda
do mundo, minha mamãe, Maria Aparecida Oliveira de Andrade Ferreira; e o homem mais
lindo do mundo, meu papai, Everaldo Ferreira Dias. Agradeço também a um homem que,
mesmo quando criança, cuidou de mim, me ajudou, aconselhou e se tornou um exemplo para
mim, e de certa forma foi um pai pra mim, um herói, meu irmão, Rodrigo Andrade Parreira,
este já o chamei de “guigo”, “Rodligo”, Rodrigo, e que hoje se tornou no grande Sgt. Parreira,
do qual me orgulho muito. Agradeço a uma pessoa que é muito importante pra mim, uma
princesa que apareceu em minha vida, a mãe do meu “neném”, Ingrid Messias Amador.
Agradeço aos meus colegas de sala, Lorrany Moreira que me ajudou muito durante todo o
curso, Edson Araújo que me emprestou o “pen drive” para salvar o TC e Rafaela Fernandes,
agradeço meu professor orientador, Dr. José de Souza Sales, que por sinal teve muita
paciência comigo. Enfim, agradeço a todos estes que mudaram minha vida para sempre.
6
RESUMO
No contexto do cálculo diferencial e integral far-se-á uma breve revisão histórica do cálculo e de maneira
simples introduzindo alguns conceitos básicos e fundamentais como a posição, a velocidade e aceleração de uma
partícula, finalizando com as leis de Newton que descrevem os movimentos dos corpos materiais. Descrever-se-á
o movimento de uma partícula no campo gravitacional próximo a superfície da terra, bem como o movimento de
uma partícula em movimento harmônico simples e analisar-se-á circuitos elétricos que contém resistores,
capacitores e indutores para auxiliar professores e alunos como exemplos de aplicações de equações diferenciais.
Palavras-chave: Circuito Elétrico RC; Circuito Elétrico RL; Lei de Hooke; Movimento de
uma partícula; Movimento harmônico simples.
7
SUMÁRIO
INTRODUÇÃO......................................................................................................................... 7
1. UM BREVE HISTÓRICO DO CÁLCULO E DAS EQUAÇÕES DIFERENCIAIS........... 8
2. MOVIMENTO E FORÇA ................................................................................................... 12
2.1. Posição, deslocamento, velocidade e aceleração. .......................................................... 12
2.2. As lei de Newton ........................................................................................................... 15
3. SISTEMAS MECÂNICOS SIMPLES ................................................................................. 18
3.1. Uma partícula num campo gravitacional uniforme ....................................................... 18
3.1.1. Uma partícula num campo gravitacional com resistência do ar ............................... 20
3.2. Uma partícula presa a uma mola ................................................................................... 23
3.2.1. Oscilação amortecida ................................................................................................. 28
4. SISTEMAS ELÉTRICOS SIMPLES.................................................................................. 36
4.1. Circuitos Elétricos......................................................................................................... 36
4.2. Circuito Elétrico RC...................................................................................................... 38
4.2.1. Carga de um capacitor............................................................................................38
4.2.2. Descarga de um capacitor...................................................................................... 40
4.3. Circuito Elétrico RL...................................................................................................... 41
4.3.1. Aumento da corrente elétrica.................................................................................. 42
4.3.2. Diminuição da corrente elétrica............................................................................. 43
4.4. Sistema de equações diferenciais em um caso particular de circuito elétrico............... 44
CONCLUSÃO .......................................................................................................................... 48
REFERÊNCIAS BIBLIOGRÁFICAS ..................................................................................... 49
8
INTRODUÇÃO
No desenvolvimento deste trabalho, com objetivo geral, serão montadas e resolvidas
algumas das equações diferenciais aplicadas em sistemas físicos reais simples, que com
certeza, servirá de auxílio para professores e alunos de graduação em licenciatura em
matemática e áreas afins.
O objetivo neste trabalho, portanto, consiste em: i) definir as principais grandezas
físicas do movimento de corpos materiais; ii) anunciar as leis de Newton que descrevem o
movimento; e iii) expor aplicações de equações diferenciais em dois sistemas da física:
sistemas mecânicos simples e circuitos elétricos simples.
Na primeira parte deste trabalho, desenvolvida no Capítulo 1, será apresentado um
breve histórico do cálculo e das equações diferenciais, no Capítulo 2, definir-se-á a posição,
deslocamento, velocidade e aceleração, e com algumas justificativas, as leis de Newton que
descrevem o movimento de corpos matérias na mecânica clássica. No Capítulo 3, a partir das
leis de Newton, montar-se-á e resolver-se-á a equação diferencial de movimento de uma
partícula, no campo gravitacional próximo a superfície da terra, será montada e resolvida a
equação de movimento de um corpo, preso a extremidade de uma mola em situação ideal e
real. No Capítulo 4, com o uso das leis de Kircchoff, serão montadas e resolvidas equações
diferenciais em circuitos elétricos que envolvam resistor, capacitor e indutor a fim de
descrever o movimento de cargas elétricas e corrente elétricas. E por fim, no capítulo 5 serão
apresentadas as conclusões.
9
1. UM BREVE HISTÓRICO DO CÁLCULO E DAS EQUAÇÕES
DIFERENCIAIS
Descoberto no século XVII, combinando ideias geométricas e analíticas, o cálculo
constrói ferramentas poderosas para resolução de problemas, e é consequência da procura de
resoluções de problemas relacionados ao movimento de partículas e de corpos rígidos.
Consequentemente o poder da Matemática veio a aumentar, já que soluções de vários
problemas só foram possíveis com a criação do cálculo (BOYER, 1974 a).
A álgebra e a trigonometria eram usadas para resolver problemas do movimento de
objetos que se deslocavam a velocidades constantes ao longo de trajetos circulares
ou lineares. O cálculo surge pela necessidade de calcular como varia a velocidade do
móvel ou no caso do trajeto do móvel ser irregular. Assim, o conceito de derivada
aparece ligado a velocidades e acelerações. A versatilidade do cálculo fez com que
ele fosse aplicado a muitas áreas que não estiveram na sua origem. Para além de
resoluções de problemas de física na atualidade, o conceito de derivada e o cálculo
em geral aplicam-se no estudo de fenômenos sociais, econômicos, químicos, etc.
(DINIZ, 2006 a).
Sendo assim, as respostas para vários problemas podem ser encontradas no cálculo,
até mesmo na resolução de problemas de natureza prática, por exemplo, soluções ópticas e
dimensões de figuras geométricas planas ou sólidas e também áreas, volumes e perímetros
destas figuras, são problemas do cotidiano que o cálculo resolve. Tendo como o conceito de
limite a ideia básica para diferenciar o cálculo da matemática “elementar”, e é pelo limite que
as derivadas e a integral são definidas.
Newton
(1642-1727)
e
Leibniz
(1646-1716),
estudando
e
pesquisando
individualmente, descobriu em conceitos próprios, a ligação entre derivadas e integrais.
Newton, relativamente, atuou pouco nas equações diferenciais, mas seus conceitos sobre
mecânica formaram a base para as aplicações das equações diferenciais, e desenvolveu um
método para resolver a equação diferencial de primeira ordem. Leibniz era considerado
autodidata, compreendia as notações como ninguém e hoje devemos nossas notações de
derivada e integral a ele, que generalizou o método de separação de variáveis em 1691
(BOYER, 1974 a).
Nos últimos 300 anos, depois destes matemáticos, muitos outros, tem se destacado
por fornecer contribuições ímpares no desenvolvimento do cálculo. Para não citar todos, um
deles foi John Von Neumann (1903-1957), um dos grandes matemáticos do século passado.
10
Voltando para o século XVII, em agosto de 1601, em Beaumont-de-Lomage, França,
nasce, talvez, o maior matemático deste século, Pierre de Fermat. Este tinha uma família bem
sucedida, com o pai marcador de peles, e um grande número de parentes advogados no
serviço público. Ele também seguiu esta ocupação, que era tradição da família, posteriormente
subiu ao posto de conselheiro do rei no parlamento de Toulouse e desempenhou a sua função
com grande capacidade e integridade durante 17 anos, até à sua morte em 12 de Janeiro de
1665.
Era visível a vocação de Fermat para a lei e os serviços públicos, mas sua paixão era
a matemática. Contribuiu consideravelmente para o desenvolvimento da matemática em
probabilidade, teoria dos números, geometria analítica e cálculo. O fato mais incrível sobre
Fermat, mesmo que naquela época a matemática tenha sido um conhecimento especializado e
havia grandes centros de pesquisa, não era um matemático profissional e nem cursou
licenciatura em matemática. Fermat, juntamente com Descartes considerados os inventores da
geometria analítica independentemente, foi além, ao introduzir os eixos perpendiculares e ao
formular equações para retas, circunferências, parábolas e hipérboles.
A pesar de Newton e Leibniz compartilharem a autoria do cálculo, Fermat fez
descobertas criticamente importantes sobre este tema, uma década antes deles terem nascido.
Descobriu as equações das tangentes, localizou os pontos máximos e mínimos e calculou a
área abaixo de diferentes curvas (BOYER, 1974 a).
As Equações Diferenciais são consideradas, no ramo das Ciências Exatas, o coração
da análise e do cálculo, sendo usada na matemática pura e aplicada, com destaque muito forte
na física que usa as equações diferenciais com uma de suas ferramentas indispensáveis.
A base deste assunto tem a contribuição de Leonhard Euler, pois a história, das
equações diferencias, começa com seus fundamentos. Os vários pesquisadores depois de
Euler, “refinaram” seu trabalho, ou seja, através de seu trabalho, desenvolveram ideias
inteiramente novas, que para a perspectiva do século XVIII era inacessível, e complexo para o
entendimento de uma única pessoa.
A história começa quando os idealizadores do cálculo, Fermat, Newton, e Leibniz, ao
obterem entendimento, interpretações e notações, suficientes para as derivadas, notaram que
logo estas apareceram em equações, onde começa a surgir o assunto. Logo perceberam que as
soluções para essas equações, não eram nada simples, onde as manipulações simbólicas e
simplificações algébricas ajudavam pouco, e com o aparecimento de integral (inverso da
derivada) só ajudava em circunstâncias muito especiais, que era quando as variáveis eram
separáveis (BOYER, 1974 b). Este método de separação de variáveis foi desenvolvido por
11
Jakob Bernoulli e generalizado por Leibnz. Sendo assim, estes pesquisadores iniciais
focalizaram seus estudos nestes casos especiais, deixando a generalização das teorias e
técnicas para aqueles que os seguiam.
Ao redor do início do século XVIII, a próxima onda de pesquisadores de equações
diferenciais começou a aplicar estes tipos de equações a problemas em astronomia e
ciências físicas. Jakob Bernoulli estudou cuidadosamente e escreveu equações
diferenciais para o movimento planetário, usando os princípios de gravidade e
momento desenvolvidos por Newton. O trabalho de Bernoulli incluiu o
desenvolvimento da catenária e o uso de coordenadas polares. Nesta época, as
equações diferenciais estavam interagindo com outros tipos de matemática e
ciências para resolver problemas aplicados significativos. Halley usou os mesmos
princípios para analisar a trajetória de um cometa que hoje leva seu nome. O irmão
de Jakob, Johann Bernoulli, foi provavelmente o primeiro matemático a entender o
cálculo de Leibniz e os princípios de mecânica para modelar matematicamente
fenômenos físicos usando equações diferenciais e a encontrar suas soluções (DINIZ,
2006 b).
Limitado pelas teorias de seu tempo, Ricatti (1676-1754), começou um estudo de
uma equação em particular, que hoje leva seu nome. Posteriormente os Bernoullis, Jakob,
Johann e Daniel, também estudaram a equação de Ricatti.
O desenvolvimento de Taylor de diferenças finitas começou um novo ramo da
matemática relacionado ao desenvolvimento das equações diferenciais, contudo muitas
equações ainda eram desconhecidas em termos de propriedades e métodos de resoluções.
Então, depois de tanto tempo de estudos, Leonhard Euler entra em cena nas equações
diferenciais, e com o benefício dos trabalhos anteriores e percepção de funções, entendeu que
as funções eram a chave para entender equações diferenciais e desenvolver métodos para suas
resoluções. Euler foi o primeiro a entender as propriedades e os papéis das funções
exponenciais, trigonométricas, logarítmicas e muitas outras funções elementares. Em 1739,
desenvolveu o método de variação de parâmetros, incluindo em seus estudos o uso de
aproximações numéricas e o desenvolvimento de métodos numéricos que proveram soluções
aproximadas para quase todas as equações. Seguindo os passos de Euler, Lagrange
desenvolveu mais teorias estendendo resultados em mecânica, equações de movimento
(problema dos três corpos) e energia potencial, mantendo o interesse de generalizar métodos e
analisar novas famílias de equações diferenciais, que foram provavelmente as suas maiores
contribuições, se tornando provavelmente o primeiro matemático com conhecimento teórico
suficiente para ser considerado um verdadeiro analista de equações diferenciais. Hoje
conhecidas como equações de Lagrange, as equações gerais de movimento para sistemas
dinâmicos, foram introduzidas em 1788.
12
Laplace levou os estudos a mais avanços com seu trabalho sobre estabilidade do
sistema solar, incluindo técnicas numéricas, que facilitou a solução de algumas integrais.
Lacroix deixou sua marca ao resumir muitos dos resultados de Eule, Lagrange,
Laplace, e Legendre. Em seguida, Fourier, com sua pesquisa matemática, contribuiu com
estudos e cálculos sobre difusão de calor e soluções de equações diferenciais.
No início do século XIX, mais avanços são atingidos através de dois principais
contribuintes: Gauss e Cauchy. Gauss, usando equações diferenciais para melhorias nas
teorias das órbitas planetárias e gravitação, estabelecendo a teoria do potencial como um ramo
da matemática e reconheceu que a teoria das funções de uma variável complexa era a chave
para entender resultados em equações diferenciais aplicadas, e Cauchy, tornou os resultados
de seus estudos em um clássico em hidrodinâmica, ao aplicar equações diferenciais para
modelar a propagação de ondas sobre a superfície de um líquido, também inventou o método
das características, importante na análise e solução das equações diferenciais parciais. Ele foi
o primeiro a definir as ideias de convergência e convergência absoluta de séries infinitas
completamente, foi o primeiro também a desenvolver uma teoria sistemática para números
complexos, e desenvolver a transformada de Fourier, que prove soluções algébricas para
equações diferenciais (BOYER, 1974 b).
Em 1841 Jacobi desenvolve o que hoje se chama, estrutura do jacobiano. Ele foi um
calculador muito hábil e perito em campos aplicados. Em 1876, foi desenvolvido teoremas
para soluções de equações diferenciais de primeira ordem, por Lipschitz. Com o passar do
tempo a teoria foi sendo desenvolvida, e as seis funções trigonométricas básicas foram
provadas transcendentais, assim como as inversas das funções trigonométricas, logarítmicas e
exponenciais. Posteriormente Hermite mostrou que, através de funções elípticas, as equações
de quinta ordem poderiam ser resolvidas. Logo em seguida Bernhard Riemann contribuiu em
seu trabalho em equações diferenciais, para resultados em física, especificamente na
dinâmica.
Não podemos fechar a história das equações diferenciais sem falar da maior matemática, antes
do século XX, que foi Kovalevsky, que depois de enfrentar muita discriminação pelo seu
gênero, teve a oportunidade de estudar com Weierstrass. Ela desenvolveu um trabalho sobre a
teoria de equações diferenciais parciais e um resultado sobre a existência de soluções para
equações diferenciais que ainda leva seu nome. E no século XX, Fredholm e Hilbert com seus
trabalhos teóricos, desenvolveram classificações para entendimentos das mais complicadas
equações diferenciais (DINIZ, 2006).
13
2. MOVIMENTO E FORÇA
O primeiro passo, para descrever o movimento de um corpo é definir as grandezas
físicas associadas. Neste capítulo faremos uma revisão das definições de grandezas físicas
fundamentais, como a posição, o deslocamento, a velocidade e a aceleração, bem como as três
leis de Newton, que descrevem o movimento dos corpos materiais (HALLIDAY; RESNICK;
WALKER, 2009). Prosseguindo nas definições sabendo que conceitos ainda mais básicos
existem, como os conceitos de ponto material ou partícula, espaço e tempo. Ponto material ou
partícula é um objeto cujas dimensões são desprezíveis em comparação com outras dimensões
envolvidas no problema, o conceito de espaço está relacionado com a medida de distância, já
o conceito tempo, que é um dos conceitos primitivos, não é possível defini-lo com precisão,
todavia o que nos interessa neste trabalho não é definir o tempo com precisão, mas defini-lo
operacionalmente, isto é, medi-lo.
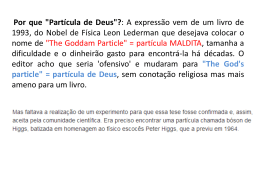
2.1. Posição, deslocamento, velocidade e aceleração.
A posição de uma partícula pode ser descrita localizando-se um ponto no espaço.
Isso pode ser feito fixando eixos ortogonais (em três dimensões, três eixos ortogonais) a partir
de uma origem e especificando suas coordenadas
da posição da partícula em um dado
instante .
FIGURA 2.1: Vetores posição, trajetória e deslocamento de uma partícula.
Fonte: (http://www.ebah.com.br/content/ABAAAezyUAA/fisica-geral-1).
14
A posição da partícula no espaço em um dado instante
é dada pelo vetor
(ALONSO, 1972):
⃗⃗
A Figura 2.1 mostra a posição
da partícula, no ponto
partícula no plano
̂
̂.
̂
(2.1)
da partícula, no ponto , no instante
, no instante
e a posição
. Por conveniência mostra-se o movimento da
.
Alinha espacial, na Figura 2.1, descrita pelas coordenadas da partícula é chamada de
trajetória. Para descrever o movimento da partícula, do instante
até o instante
, pode-se
obter o deslocamento ∆ da partícula, dado por (BONJORNO, 2001):
Quando a partícula sofre um deslocamento
.
(2.2)
em um intervalo de tempo
e nos
interessa saber com que rapidez a partícula se move, pode-se obter sua velocidade
média
instante
pela razão do seu deslocamento
como o intervalo de tempo
do instante
até o
, ou seja:
.
(2.3)
Ao falar de velocidade de uma partícula, trata-se em geral da sua velocidade
instantânea, ou seja, sua velocidade em algum instante , que é a velocidade para qual tende a
velocidade média quando
tende a zero. Usando a definição da derivada de uma função
vetorial a velocidade instantânea é dada por:
.
(2.4)
Portanto, pode-se escrever simplesmente a velocidade da partícula em um dado
instante por:
.
(2.5)
15
As componentes
,
e
da velocidade no instante , são dadas por:
,
(2.6)
{
que representam as taxas de variação de cada uma das coordenadas da posição em função do
tempo, cujo módulo da velocidade, é dado por:
√( )
A velocidade
( )
( ) .
(2.7)
da partícula em um instante é tangente a trajetória da partícula.
De forma análoga pode-se definir as componentes da aceleração
,
e
num
instante por,
,
(2.8)
{
que representam as taxas da variação de cada uma das componentes da velocidade em função
do tempo.
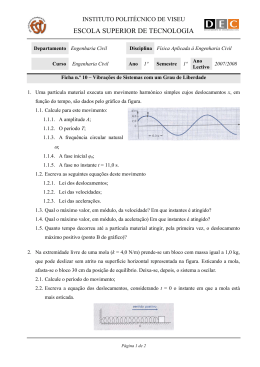
Ilustra-se a aceleração da partícula na Figura 2.2, e novamente, por conveniência,
apresentado apenas no plano
.
16
FIGURA 2.2: Aceleração de uma partícula, e as componentes escalares da aceleração.
Fonte: (Fundamentos da Física, Vol. 1, HALLIDAY, RESNICK, WALKER, Pág. 69, 2009).
Apesar das definições da posição, velocidade e aceleração terem sido feitas no
sistema cartesiano, vale lembrar que os vetores são independentes do sistema de coordenadas
adotados.
2.2. As Leis de Newton.
O movimento de uma partícula é determinado pela natureza e pela distribuição de
outros corpos, que constituem sua vizinhança.
Nosso trabalho lista-se ao caso especial, muito importante, de objetos grandes que se
movimentam com velocidades menores que a velocidade da luz, que em geral é indicada pela
letra , que no vácuo é da ordem de 3,0x108 m/s. E esse domínio é chamado de mecânica
clássica.
Ainda neste trabalho serão utilizados os termos força e massa com imprecisão,
identificando força com a influência da vizinhança, sendo uma maneira relacionar a
vizinhança com o movimento de uma partícula. As definições serão mais bem apresentadas à
frente.
O termo massa (NUSSENZVEIG, 1996), também com imprecisão, identificar-se-á
com a resistência que um corpo oferece ao ser acelerado por uma força, frequentemente
denominada inércia.
Uma partícula da qual se conhece as características, como por exemplo, sua massa,
com uma posição e velocidade iniciais conhecidas. Qual o movimento subsequente dessa
partícula? Este problema foi resolvido, em grande parte, por Isaac Newton (1642-1727)
quando propôs as três leis do movimento, desenvolvendo as ideias de Galileu (que morreu no
17
ano que Isaac Newton nasceu) e de outros.
As leis de Newton são constituídas por três pilares fundamentais da Mecânica
Clássica, e por isso é chamada também de Mecânica Newtoniana.
Quando se está em um automóvel em movimento e este freia, sente-se como se
empurrados para frente, porque nosso corpo tende a continuar em movimento, ou quando o
automóvel faz uma curva, se tem a impressão de se estar sendo atirado para o lado contrário à
curva, isso porque a velocidade vetorial é tangente à trajetória. Estes efeitos são explicados
pelo princípio da inércia, a primeira lei de Newton, cujo enunciado é: "Um corpo em repouso tende
a permanecer em repouso, e um corpo em movimento tende a permanecer em movimento"
FERRARO; SOARES, 1999).
(JÚNIOR;
Conclui-se que um corpo só altera seu estado de inércia se alguma
coisa, ou alguém aplicar nele uma força diferente de zero.
Ao se aplicar uma força de mesma intensidade em dois corpos de massas diferentes,
observa-se que elas não produzem aceleração igual (RAMALHO; NICOLAU; TOLEDO,
1999).
O princípio fundamental da dinâmica diz que a força é diretamente proporcional ao
produto da massa de um corpo pela sua aceleração, sendo assim, ter-se-á:
,
conhecida como a segunda lei de Newton, onde
(2.9)
é a resultante das forças que atuam sobre o
corpo (no sistema internacional em Newtons (N)), m a massa do corpo (em Kg) e a aceleração
adquirida pelo corpo (em m/s2).
Usando (2.8), as componentes das forças são dadas por:
(2.10)
{
Quando dois corpos se interagem, a força que um corpo faz no outro, terá outra força
de mesmo módulo e mesma direção e sentido oposto que outro faz no corpo. Este fato mostra
o princípio da ação e reação, conhecida como a terceira lei de Newton, cujo enunciado é:
“Para toda força de ação, existe uma força de reação” (JÚNIOR; FERRARO; SOARES, 1999).
Considerando dois corpos
e , sendo
a força que o corpo
exerce no corpo ,
18
e
a força que o corpo
exerce no corpo , ter-se-á que
(2.11)
19
3. SISTEMA MECÂNICO SIMPLES
Neste capítulo, estudar-se-á o movimento de uma partícula de massa
, sob
influência de uma ou mais forças em uma dimensão, sem prejuízo, pois o movimento em três
dimensões pode ser decomposto e estudado separadamente como a projeção da força na
direção de cada eixo do sistema adotado. Qualquer movimento da partícula é descrito través
das leis de Newton, neste sentido, serão montadas e resolvidas equações diferenciais aplicadas
em sistemas físicos ideias e reais simples de acordo com a segunda lei de Newton. Ignorando
o rigor matemático, daqui para frente, ciente que o rigor é necessário e fundamental, usar a
intuição e/ou a falta de rigor para descrever o movimento de uma partícula no campo
gravitacional próximo a superfície da terra desprezando a resistência do ar e considerando a
resistência do ar, também através da resolução da equação de movimento descrever-se-á o
movimento de um corpo, preso a extremidade de uma mola sem amortecimento e com
amortecimento.
3.1. Uma partícula num campo gravitacional uniforme.
Uma partícula de massa
, submetido a um campo gravitacional uniforme,
desprezando a resistência do ar, representado na FIGURA 3.1, é um dos casos mais simples e
importante de uma partícula sob ação de uma força constante, que neste caso é a força peso.
FIGURA 3.1: Uma partícula num campo gravitacional uniforme.
De acordo com a segunda lei de Newton, dada por (2.10), ter-se-á a equação de
movimento
.
(3.1)
20
Esta é uma equação diferencial de primeira ordem. Separando as variáveis e integrando entre
os instantes iniciais
, com a partícula com velocidade inicial
e o instante final , com
a partícula com velocidade final , ter-se-á
∫
∫
,
(3.2)
encontrando,
,
(3.3)
FIGURA 3.2: Gráfico da velocidade em função do tempo de uma partícula num campo gravitacional constante.
a velocidade da partícula em função do tempo num campo gravitacional uniforme,
representada na Figura 3.2 com velocidade inicial
e orientação positiva, no eixo
vertical para baixo. Como a aceleração da partícula neste caso é constante e igual a
, resta
encontrar a posição da partícula.
Usando (2.6), pode-se escrever (3.3), na forma,
.
(3.4)
Esta é uma equação diferencial de primeira ordem. De maneira análoga, separando as
variáveis e integrando entre os instantes iniciais
, com a partícula na posição inicial
e
o instante final com a partícula na posição final , ter-se-á
∫
∫
(3.5)
21
Com isto,
,
(3.6)
é a posição da partícula em função do tempo.
3.1.1. Uma partícula num campo gravitacional com resistência do ar.
Na realidade, uma partícula de massa
, está sujeita a força de resistência do ar,
mostrada na Figura (3.3), e esta força surge de qualquer fluido que atuam nos corpos em
queda, sendo uma força dependente da velocidade do corpo. Essa força de resistência depende
da forma geométrica dos corpos e da densidade dos fluidos.
Limitando a aplicação para a força de resistência do ar proporcional a velocidade,
considerando o nosso objeto pequeno, e a velocidade próxima a 24 m/s. Objetos grandes ou
com velocidade superior a 25 m/s, a força de resistência do fluido, e necessariamente a da
resistência do ar é proporcional a velocidade da partícula com expoente igual ou maior que
dois (SYMON, 1982).
Então, particularmente, a força de resistência do ar será dada por
,
onde
(3.7)
é uma constante positiva que depende da forma geométrica do objeto e da densidade
do ar.
FIGURA 3.3: Uma partícula num campo gravitacional uniforme com resistência do ar.
22
Usando a segunda lei de Newton, a equação de movimento de queda, de uma
partícula de massa
, num campo gravitacional
uniforme, com resistência do ar será dada
por
,
(3.8)
sendo que o primeiro sinal negativo indica que a força peso aponta para baixo, e o segundo
sinal negativo indica que a força é contrária velocidade do corpo.
Pode-se reescrever (3.8), desta forma
,
e integrando a partir do instante inicial
(3.9)
com a partícula com velocidade inicial
, até
um instante , com a partícula com velocidade , será obtido
∫
∫
.
(3.10)
Usando o método de mudança de variável, fazendo
(3.11)
e substituindo em (3.10) ter-se-á
∫
,
(3.12)
obtendo
(
)
.
(3.13)
Substituindo o limite superior e o limite inferior a velocidade da partícula em função do
tempo será:
23
(
Nota-se que para o instante inicial
)
.
(3.14)
a velocidade da partícula é
e para um tempo
muito longo a velocidade da partícula alcança uma velocidade limite de
, onde a força peso
é igual à força da resistência do ar na partícula.
Usando (2.6), a equação (3.14) ficará
(
)
.
(3.15)
Separando as varáveis e integrando entre o instante inicial
inicial
coma partícula na posição
, até um instante , com a partícula na posição final , ter-se-á
∫
∫ [
(
)
]
,
(3.16)
assim,
[
(
)
] .
(3.17)
Substituindo o limite superior e o limite inferior em (3.17) a posição da partícula em função
do tempo será dada por:
(
)(
),
(3.18)
e para finalizar este movimento, de acordo (2.8),a partir de (3.14) ou de (3.18), a aceleração
da partícula encontra-se
(
então
)
,
(3.19)
24
(
Nota-se que em
)
.
(3.20)
a aceleração da partícula é diferente do valor da gravidade , ou seja,
com a partícula partindo com uma velocidade inicial diferente de zero, a aceleração inicial é
maior que o valor
. E, para um longo tempo a aceleração será zero, de acordo com a
velocidade limite vista em (3.14).
3.2. Uma partícula presa a uma mola.
Nesta seção serão dados exemplos de movimentos que podem ser descritos em termo
da função seno e em termo da função cosseno. Movimento de partícula descrito pela função
seno e pela função cosseno é chamado de movimento harmônico. Limitando este estudo,
montando e resolvendo equações diferenciais aplicadas a uma partícula, de massa
, presa a
uma mola.
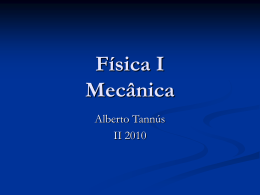
Quando se fala de algo elástico, logo se pensa em alguma coisa que pode ser
comprimida ou esticada por uma força, como em uma mola, por exemplo, (veja FIGURA
3.4).
FIGURA 3.4: Movimento Oscilatório. Fonte:(http://profs.ccems.pt/PauloPortugal/PHYSICA/indice.htm).
25
Roberth Hooke (1635-1703) estudou várias deformações que uma mola pode sofrer.
Em 1660, o físico inglês percebeu que quanto maior a força aplicada em uma partícula presa à
mola, maior a deformação da mola, tanto comprimindo, quanto esticando, e verificou também
que existia sempre proporcionalidade entre forças deformantes e deformação elástica
produzida. Posteriormente, em 1676, anunciou o resultado de suas observações em forma de
uma lei, chamada lei de Hooke, onde a força exercida por uma mola, na partícula de massa
é proporcional a deformação ou compressão
da mola (RODRIGUES, 2006), descrita por:
,
sendo
,
(3.21)
a força elástica exercida pela mola na partícula e
a constante de proporcionalidade
chamada de constante elástica da mola.
Na FIGURA (3.5) é mostrada uma partícula de massa
, presa a uma mola com constante elástica
, em uma posição inicial
, com amplitude do movimento da
partícula dada por A.
FIGURA 3.5: Uma partícula de massa m, presa a uma mola.
Fonte:(http://profs.ccems.pt/PauloPortugal/PHYSICA/indice.htm).
Pela segunda lei de Newton, de acordo com (2.10) e a lei de Hooke, dada por (3.21),
pode-se escrever a equação de movimento por:
,
ou
(3.22)
26
.
(3.23)
Esta é uma equação diferencial de segunda ordem.
Como
é a posição da partícula, representando uma função dependente do tempo
, deve-se encontrar uma função cuja derivada segunda é igual à própria função
dependente do tempo a menos de uma constante com o sinal trocado. Sabe-se que tanto a
função seno como a função cosseno tem esta particularidade.
Então, a posição da partícula de massa
pode ser dada por:
(3.24)
sendo
,
e
constantes a serem determinadas.
Nota-se que a derivada primeira e a derivada segunda da posição , em relação ao tempo,
respectivamente serão dadas por:
,
(3.25)
e
,
(3.26)
Comparando (3.26) com (3.23), pode-se verificar que:
√ .
(3.27)
Para completar a solução de (3.23), forma-se um triângulo com os coeficientes
de (3.24) mostrada na FIGURA (3.6).
e
27
FIGURA 3.6: Triângulo a partir dos coeficientes.
Pode-se multiplicar e dividir os termos da Eq. (3.24) por √
, e reescrevê-la na seguinte
forma,
Observando (3.5) e fazendo
√
√
√
√
√
.
(3.28)
, ter-se-á que
[
],
ou seja, a solução de (3.29), representando a posição da partícula, de massa
(3.29)
presa a uma
extremidade de uma mola, em função do tempo será dada por:
,
sendo
(3.30)
chamada de constante de fase, sendo determinada pelas condições de iniciais do
movimento da partícula.
Como a função cosseno tem o valor máximo igual a
se que
e valor mínimo igual a
, observa-
é o valor máximo (ou mínimo) alcançada pela partícula, ou seja, sua amplitude, dada
por:
.
(3.31)
28
A posição da partícula, em função do tempo, é visto na FIGURA (3.7) com
.
FIGURA 3.7: Variação da posição em função do tempo.
Para dar interpretação da constante
, pode-se somar a quantidade
no instante de (3.30),
resultando em
[ (
)
].
(3.32)
,
(3.33)
Abrindo o parêntese tem-se
resultando novamente na solução de (3.30), representando a posição da partícula, de massa
presa a uma extremidade de uma mola no mesmo instante . A partícula, então, volta para a
mesma posição num tempo posterior
, ou seja,
é o período do movimento da partícula.
Então o período da partícula pode ser escrito por
,
(3.34)
de acordo com (3.27), ainda pode-se escrever o período por:
√ .
Usando (2.6) dada por:
(3.35)
29
,
a velocidade da partícula presa a mola será
,
mostrando que o módulo da velocidade máxima é dada por
(3.36)
.
Derivando a velocidade em função de , de acordo com (2.8), será obtida a aceleração da
partícula presa na mola
(3.37)
Veja que multiplicando a aceleração pela massa
da partícula ter-se-á a força que a
mola faz na partícula dada pela lei de Hooke.
3.2.1. Oscilação amortecida.
Na realidade, aqui também, uma partícula presa a uma mola, está sujeita a força
elástica, dada pela lei de Hooke, e também a uma força de resistência, que é a força de atrito,
analogamente estudada na seção 3.1.2. Nessa seção montar-se-á e resolver-se-á equações para
o movimento oscilatório de uma partícula, presa a uma mola, com amortecimento, ou seja,
agora há uma força de resistência, atuando no sistema. Essa força, como anteriormente, será
dada por,
.
(3.38)
Utilizando a segunda lei de Newton, a lei de Hooke e a equação acima, pode-se descrever o
movimento da partícula neste sistema conforme a segunda lei de Newton, da seguinte forma,
30
,
(3.39)
então,
.
(3.40)
Está é uma equação diferencial de segunda ordem completa que se pretende encontrar a
solução geral, que descreve a posição da partícula presa a uma mola com amortecimento, em
função do tempo. Fazendo
√
,
(3.41)
Obtém-se (3.40) reescrita na forma:
,
Uma solução tentativa com
(3.42)
constante, será dada pela exponencial:
.
(3.43)
Sendo que a derivada da posição em função do tempo é
(3.44)
e a segunda derivada da posição em função do tempo
.
Substituindo (3.44) e (3.45) em (3.42), encontra-se
(3.45)
31
,
(3.46)
ou
,
(3.47)
cuja as soluções são:
√
(3.48)
e
√
.
(3.49)
Portanto a solução geral de (3.40), dada por (3.43) será da seguinte forma:
(
√
√
).
(3.50)
Para este propósito, será usada a solução, dada por (3.50), inicialmente com
, chamado amortecimento subcrítico, neste caso.
Definindo,
√
√
,
(3.51)
Ter-se-á a solução, dada por (3.50),
(
Sendo
e
).
(3.52)
números complexos que garante a posição da partícula , presa a mola, uma
quantidade real. Verifica-se que a posição da partícula sendo uma quantidade real o complexo
conjugado da posição é a própria posição , ou seja,
32
(
)
.
(3.53)
Logo:
,
(3.54)
então
(
).
(3.55)
Usando a fórmula de Euler
,
(3.56)
em (3.55), tem-se
[
].
(3.57)
Escrevendo
| |
,
(3.58)
ter-se-á que
[| |
| |
Depois de alguma álgebra escrevendo
].
(3.59)
na fórmula de Euler, chaga-se em
| |
.
(3.60)
33
O que garante a posição da partícula com uma quantidade real. Sendo | |
a amplitude
do movimento da partícula, então a posição da partícula em função do tempo será
.
Sabendo que,
(3.61)
e , são determinadas pelas condições iniciais.
A partícula oscilará em ciclos cada vez menores de acordo com o tempo, mostrado na
FIGURA (3.7).
Fig. (3.7). Posição da partícula presa em uma mola em função do tempo em um amortecimento subcrítico.
Usando (2.6) dada por:
,
ter-se-á que a velocidade da partícula, neste caso, é
[
].
(3.62)
Derivando em função de , de acordo com (2.8), será obtida a aceleração da
partícula, neste caso, por:
[
].
(3.63)
34
Usando a solução de (3.40), dada por (3.50), tomando
, chamado de
amortecimento crítico, com
,
(3.64)
.
(3.65)
Ter-se-á uma solução particular igual a
Outra solução particular, de (3.40), por tentativa é dada por
,
sendo solução somente para
(3.66)
.Verifica-se, calculando a derivada primeira e segunda,
em relação ao tempo de (3.66) e substituindo em (3.40). Então, a soma das duas soluções
particulares é a solução geral de (3.40), que descreve a posição da partícula presa na mola do
amortecimento crítico, será escrita na forma
,
(3.67)
ou
,
(3.68)
35
FIGURA 3.8: Posição da partícula presa em uma mola em função do tempo em um amortecimento crítico.
descrevendo a posição da partícula, em função do instante , no caso do amortecimento
crítico.
Usando (2.6) dada por:
,
a velocidade da partícula, neste caso, será
.
(3.69)
Conforme, apresentado em (3.8), observa-se que a partícula presa na mola, com
amortecimento crítico, não realizará nenhum ciclo e vai para o repouso na origem com o
passar do tempo.
Derivando a velocidade em função de , de acordo com (2.8), será obtida a aceleração
da partícula, neste caso, por:
.
Tomando agora
(3.70)
, em (3.50), ter-se-á o caso chamado de amortecimento
supercrítico, e a solução de (3.40) representando a posição da partícula é a própria (3.50), só
que neste caso
e
real. Considerando √
por:
devem ser reais, o que garante a posição da partículauma quantidade
= , obtém-se a posição da partícula, neste caso, descrita
36
.
(3.71)
FIGURA 3.8: Posição da partícula presa em uma mola em função do tempo em um amortecimento supercrítico.
A velocidade e a aceleração, de acordo com (2.6) e (2.8), são dadas, respectivamente,
por:
,
(3.72)
e
.
(3.73)
Nota-se que agora, há um instante finito que a partícula irá para o repouso antes da origem,
sem realizar nenhum ciclo.
37
4. SISTEMAS ELÉTRICOS SIMPLES
Neste capítulo, com o uso da lei de Ohme das leis de Kircchoff, montar-se-á e
resolver-se-á, equações diferenciais em circuitos elétricos que envolvam resistores,
capacitores e indutores, a fim de descrever os movimentos das cargas elétricas e
consequentemente das correntes elétricas.
Os circuitos elétricos pertinentes a este trabalho são os circuitos que contém um
resistor em série com capacitor, chamado de circuito RC, e o circuito que contém um resistor
em série com um indutor chamado de circuito RL.
4.1. Circuitos elétricos
Uma fonte de força eletromotriz (f.e.m.), em geral representado por , é qualquer
dispositivo capaz de manter uma diferença de potencial elétrico (d.p.p.) entre dois pontos em
um circuito como uma pilha, uma bateria, etc.
Resistor (símbolo
) é o elemento do circuito elétrico que tem a função de
transformar energia elétrica em energia térmica, dificultando a passagem de corrente elétrica
no circuito, dada pelo fluxo de carga elétrica . A medida desta “dificuldade” é denominada
resistência elétrica (HALLIDAY; RESNICK; WALKER,2009).
George Simon Ohm (1787-1854) um físico alemão, fez muitas experiências na área
de circuitos elétricos, e em uma de suas experiências demonstrou que a intensidade da
corrente elétrica que atravessa um condutor é proporcional a d.d.p.
entre os terminais deste
condutor dado por
,
(4.1)
conhecida com lei de Ohm, sendo R a resistência elétrica do condutor.
Se pensar em uma carga
, que passa por um circuito em um intervalo de tempo
,
a corrente nesse circuito, cuja unidade de medida é o ampère (A), é definida por
.
(4.2)
38
Um dispositivo usado em circuitos elétricos é o capacitor (símbolo
e carga –
por dois condutores próximos, que contém carga
), formado
em cada um dos dois
condutores, cuja função principal, entre outras, é o armazenamento das cargas elétricas. E,
pode-se definir
,
sendo
(4.3)
a capacidade de armazenar cargas, denominada capacitância cuja unidade de medida
é o Farad (F) no sistema internacional e
a d.d.p. entre os condutores que formam o
capacitor.
Indutor (símbolo
) é um dispositivo que armazena energia na forma de
campo magnético, e a grandeza física associada ao indutor é denominada indutância cuja
unidade de medida é o Henry (H). A d.d.p. entre os terminais do indutor é verificada
experimentalmente por:
,
(4.4)
sendo L a indutância do indutor elétrico.
Gustav Kircchoff (1824 - 1887), físico alemão, fez várias pesquisas sobre o
comportamento das grandezas em um circuito elétrico composto por malhas e nós. Malha é
um caminho fechado num circuito elétrico e nó é ponto de conexão de dois ou mais
dispositivos em um circuito. Então em 1845 formulou, através de suas experiências, as leis
que descrevem as diferenças de potenciais elétricos nos terminais dos dispositivos que
formam o circuito elétrico e as correntes que circulam no circuito elétrico, nomeadas de leis
de Kircchoff.
Se pensar em um nó com três corrente elétricas, sendo uma corrente entrando,
corrente positiva, e duas correntes saindo, ou seja, correntes negativas, ter-se-á
,
(4.5)
generalizando, então, a primeira lei de Kircchoff, afirma que a soma algébrica das correntes
elétricas em um nó é igual a zero.
39
A segunda lei de Kircchoff é bem semelhante a primeira só que refere-se sobre a
d.d.p. (ou tensão) e ao percorrer uma malha no circuito elétrico, desta forma ter-se-á que soma
algébrica das tensões ao longo da malha é igual a zero. Se tiver apenas três dispositivos, a
segunda lei de Kircchoff mostra que
,
sendo
,
e
(4.6)
as respectivas variações de potencial elétrico em cada um dos
dispositivos(BONATTI, et. el, 1995).
4.2. Circuito Elétrico RC
Nesta seção montar-se-á e resolver-se-á a equação diferencial a partir da segunda lei
de Kircchoff de circuito formado por uma f.e.m., um resistor e um capacitor ligados em série,
com circuito RC, a fim de encontrar a carga elétrica e a corrente elétrica quando o capacitor
estiver carregando e quando o capacitor estiver descarregando.
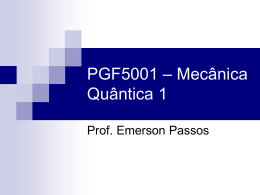
4.2.1. Carga de um capacitor
A FIGURA (4.1) mostra um circuito formado por uma f.e.m., um resistor
capacitor
e um
ligados em série. Quando a chave S é colocada na posição a, o capacitor é
carregado através do resistor, e quando colocada na posição b o capacitor é descarregado
através do resistor.
FIGURA 4.1: Circuito Elétrico RC.
40
Analisando a FIGURA (4.1) e considerando o capacitor inicialmente descarregado,
para carregá-lo coloca-se a chave na posição . De acordo com a segunda lei de Kircchoff,
com a lei de Ohm e a d.d.p. no capacitor, ter-se-á que
,
(4.7)
utilizando (4.2), será obtido,
.
(4.8)
Está é uma equação diferencial de primeira ordem.
Considerando a condição de que o capacitor está inicialmente descarregado, ou seja,
de que
em
, separando as variáveis e integrando entre o instante
, de forma análoga a (3.8), a solução de (4.8) será a carga
e o instante
em função do tempo, acumulada
no capacitor, dada por:
(
Sendo que a constante de tempo capacitiva é
Nota-se que em
).
(4.9)
.
a carga no capacitor é realmente
após um longo tempo o valor final da carga no capacitor é
. E, também note que
, chamado de valor de
equilíbrio.
A FIGURA (4.2) mostra a carga em função do tempo quando o capacitor estiver
carregando.
41
FIGURA 4.2: Gráfico que mostra a carga do capacitor em função do tempo.
A corrente que atravessa o resistor, durante o carregamento do capacitor, conforme
(4.2), será
( )
.
(4.10)
FIGURA 4.3: Gráfico que mostra a corrente elétrica de carga no circuito em função do tempo.
A FIGURA (4.3) mostra a corrente em função do tempo durante o processo de
carregamento do capacitor (HALLIDAY; RESNICK; WALKER, 2009, p.183).
4.2.2. Descarga de um capacitor
Suponha que o capacitor na FIGURA (4.1) totalmente carregado, ou seja,
chave
é deslocada da posição a para a posição
,ea
. Isto faz com o capacitor comece a
descarregar. Percebe-se que neste caso a fonte não está mais no circuito,
. Sendo assim a
42
equação que descreve a variação da carga elétrica em função do tempo será dada, de acordo
com (4.8) escrita na forma
,
(4.11)
que é uma equação diferencial de primeira ordem, a qual pode ser resolvida separando as
variáveis e integrando, de forma análoga a resolução de (3.8), considerando a condição inicial
do capacitor, ou seja,
em
. Sendo assim ter-se-á,
,
(4.12)
a carga elétrica em função do tempo no processo de descarregamento do capacitor no circuito
RC. Nota-se que em
a carga realmente é para um tempo muito longo
.
De acordo com (4.2), a corrente em função do tempo que atravessa o resistor
( )
.
(4.13)
O sinal menos indica que a corrente no circuito dada pela FIGURA (4.1) está no
sentido contrário quando o capacitor estiver descarregando. E, assim como a carga, a corrente
no circuito RC, com o descarregamento do capacitor, diminui exponencialmente
(HALLIDAY; RESNICK; WALKER, 2009, p.184).
4.3. Circuito Elétrico RL
Como visto na seção 4.2, liga-se uma f.e.m. bruscamente em um circuito, de uma
malha, que contém um resistor
em série com um capacitor inicialmente descarregado a
carga no capacitor aumenta gradativamente a partir de zero, e no descarregamento a carga
diminui exponencialmente até zero. Substituindo o capacitor por um indutor pode-se verificar
o comportamento da corrente com a f.e.m. no circuito e sem a f.e.m.
A FIGURA (4.4) mostra um circuito formado por uma f.e.m. um resistor
indutor
em série.
e um
43
FIGURA 4.4: Circuito elétrico RL
Nesta seção montar-se-á e resolver-se-á as equações diferenciais a partir da segunda
lei de Kircchoff, a fim de encontrar o aumento e diminuição da corrente elétrica no circuito
RL.
4.3.1. Aumento da corrente elétrica
Analisando a FIGURA (4.4), deslocando a chave para o ponto , a corrente começa a
aumentar. De acordo com a segunda lei de Kircchoff, com a lei de Ohm e com a d.d.p. no
indutor ter-se-á que,
.
(4.14)
Esta é uma equação diferencial de primeira ordem, a qual pode ser resolvida separando as
variáveis e integrando posteriormente, de forma análoga a resolução de (3.8), considerando a
condição inicial do indutor, ou seja,
e a corrente
. Sendo assim a solução de (4.14)
é
(
),
(4.15)
44
com a constante de tempo indutiva dada por,
,
(4.16)
verifica-se o aumento exponencial da corrente elétrica, com o passar do tempo, no circuito RL
(HALLIDAY; RESNICK; WALKER, 2009, p.282) e para um longo tempo a corrente no
circuito é
,
(4.17)
4.3.2. Diminuição da corrente elétrica
Analisando a FIGURA (4.4), ao deslocar a chave para a posição , simplesmente
tira-se a f.e.m. do circuito. Então usando (4.14), com
, obtém-se
.
(4.18)
De forma análoga a resolução de (4.14), pode-se resolver a equação diferencial
acima. Satisfazendo as condições iniciais do indutor, ou seja,
,
(4.19)
ter-se-á,
,
ou seja, quando desloca-se a chave , da posição
(4.20)
para a posição , a corrente começa a
diminuir, fazendo com que a corrente no resistor caia para zero, mas não de forma
instantânea, então, obtendo a diminuição da corrente elétrica no circuito RL (HALLIDAY;
RESNICK; WALKER, 2009, p.283).
45
FIGURA 4.5: Variação da d.d.p. com o tempo entre os terminais do indutor.
4.4. Sistema de equações diferenciais em um caso particular de circuito elétrico
Nos exemplos anteriores foram utilizados um resistore um capacitor (ou indutor) em
série com uma f.e.m.no processo de carregamento (ou aumento de corrente) e
descarregamento (ou diminuição de corrente) obtendo uma única equação diferencial. Nessa
seção dar-se-á um exemplo de montagem de um sistema de equações de primeira ordem, e
suas soluções com o cálculo das correntes que atravessam os resistores bem como a carga
acumulada no capacitor, usando resistores e um capacitor, para facilitar, sem perda de
generalidade.
Este exemplo consiste de uma f.e.m. , três resistores
com a chave
,
e
, e um capacitor ,
fechando o circuito, e carregando o capacitor, inicialmente descarregado,
mostrado na FIGURA (4.6).
Fig. (4.6). Circuito elétrico
Usando a segunda lei de Kircchoff, a lei de Ohm e a definição de capacitância e
indutância, dada por (4.1), (4.3) e (4.4), ter-se-á na malha da esquerda,
46
,
(4.21)
.
(4.22)
e na malha da direita
Para obter a terceira equação, usa-se a primeira lei de Kircchoff (lei dos nós) no nó
,
ficando:
.
(4.23)
De acordo com a definição de corrente dada por (4.2), ter-se-á:
,
(4.24)
(4.25)
e
.
(4.26)
Substituindo-as nas equações (4.21- 4.23), ter-se-á
.
(4.27)
{
Este é um sistema de equações de primeira ordem acopladas. Para resolver este sistema,
utilizam-se as equações iniciais (4.21), (4.22) e (4.23). Primeiramente, isola-se a corrente
em (4.21), resultando em
47
.
(4.28)
Substituindo (4.28) em (4.22) e em (4.23), ficar-se-á com duas equações, uma em termo da
corrente
e outra em termo da corrente
. Isolando a corrente
em qualquer uma dessas
duas equações e substituindo na outra, após alguma álgebra, ter-se-á a seguinte equação
diferencial de primeira ordem,
,
(4.29)
sendo
(4.30)
e
.
(4.31)
A solução de (4.29), que descreve a carga
em função do tempo no circuito da
FIGURA (4.1), e de forma análoga à solução de (4.8), obtém-se
(
Nota-se que com
e
).
(4.32)
, como esperado, e com o tempo muito longo, a
d.d.p. no capacitor, não é mais simplesmente a f.e.m.
.A
, mas claramente depende da
resistência que não está em série com o capacitor.
Conforme (4.25) a corrente no resistor é
.
Substituindo o valor da carga
a corrente
no resistor
será
, dada por (4.32), e da corrente
(4.33)
, dada por (4.33), em (4.22),
48
,
e substituindo as correntes
e
(4.34)
em (4.23), ter-se-á que a corrente que passa pelo resistor
será
.
Examinando de perto, de acordo com (4.33), (4.34) e (4.35) em
(4.35)
, as correntes
nos mostra como se tivesse retirado o capacitor do circuito. E para um tempo muito longo a
corrente
no resistor
é igual a zero e, como esperado, as correntes nos resistores
e
tem o mesmo valor.
Portanto, as importantes soluções físicas do sistema de equações foram dadas, ou
seja, as correntes que passam em cada resistor e a carga acumulada no capacitor, em função
do tempo.
49
CONCLUSÃO
Neste trabalho fez-se um breve histórico sobre o cálculo e das equações diferenciais,
fez-se também uma revisão de grandezas físicas, dando ênfase na posição, velocidade
instantânea e aceleração no sistema cartesiano, apresentamos as leis de Newton, que se
utilizou para montar as equações diferenciais que representam equações de movimento em
cada caso estudado, e para montar essas equações de movimento praticamente utilizou-se a
segunda lei de Newton, que é uma equação fundamental para estes, e outros, movimentos.
Mostrou-se algumas aplicações das equações diferenciais, tanto de primeira ordem,
quanto de segunda ordem, em sistemas mecânicos simples: no estudo do movimento de uma
partícula num campo gravitacional uniforme numa situação ideal, ou seja, sem a resistência
do ar, e montamos e resolvemos a equação de movimento que descreve o movimento de uma
partícula numa situação real, ou seja, com a resistência do ar, obtendo a posição, a velocidade
e a aceleração em função do tempo em cada caso, outro sistema mecânico simples estudado
foi o movimento de uma partícula presa a uma mola sem amortecimento, que é o caso ideal, e
com amortecimento que é o caso real,e em sistemas elétricos simples: circuito elétrico RC,
circuito elétrico RL e um sistema de equações aplicadas em um caso particular do circuito
elétrico envolvendo uma fonte de força eletromotriz, resistores e um capacitor, com solução
feita na íntegra. Infelizmente, para muitos acadêmicos, estas aplicações não são vistas durante
o curso de licenciatura.
Qual professor nunca foi questionado dessa forma: “Onde vou usar isso na minha
vida?”. Esta pergunta é frequentemente feita aos professores, principalmente da área da
matemática, pois a maioria dos alunos não consegue perceber onde serão usadas tantas
fórmulas e equações. Outro fator que também deveria ser bem reforçado é o fato de que, na
física, se é conhecida a equação da posição, ou da velocidade, ou da aceleração, pode-se
chegar a qualquer uma das outras, usando regras de derivação ou integração, e de fato é muito
importante para o aprendizado tanto da matemática, quanto na física. E percebe-se que através
destas equações montadas e resolvidas aqui, aprendemos onde e como aplicar tais equações.
Então, espera-se que este trabalho seja bem aproveitado para estudos, pesquisas e
projetos, para professores e alunos da área de matemática e de áreas afins.
50
REFERÊNCIAS BIBLIOGRÁFICAS
AKIRA,
E,
2006.
Indutores.
Disponível
em:
http://www.ebah.com.br/content/ABAAAA_fYAJ/indutores. Acesso em: 28 set. 2012, 21: 35:
41.
ALONSO, M; FINN, E.J. Curso universitário: Mecânica. Física 1, Vol. 1. Editora Edgard
Blücher, 1972.
BONATTI, I.S; PERES, P.L.D; BORELLI, W.C; JÚNIOR, Y.B; ADDY, M.D, 1995.
Resistores. Disponível em: http://www.dt.fee.unicamp.br/~www/ea513/ea513.html. Acesso
em: 25 set. 2012, 13: 51: 19.
BONJORNO, R.A; BONJORNO, J.R; BONJORNO, V;RAMOS, C.M. Física Completa.
Vol. Único. Ensino Médio. 2. ed. FTD Editora; São Paulo, 2001 a.
BONJORNO, R.A; BONJORNO, R.J; BONJORNO,
Completa.Vol. único, São Paulo: Editora FTD, 2001 b.
V;
RAMOS,
C.M.
Física
BOYER, C.B. História da Matemática.In: História das Equações Diferenciais. Editora
Edgard Blücher, São Paulo, 1974 b.
BOYER, C.B. História da Matemática.In: História do Cálculo. Editora Edgard Blücher, São
Paulo, 1974 a.
DINIZ,G.L, 2006 a. História das Equações Diferenciais. Disponível em:
http://www.prof2000.pt/users/4238anibal/tarefa7/ficalu3.htm. Acesso em: 28 jun. 2012, 14:
30: 02.
DINIZ,G.L,
2006
b.
Nota
Histórica
do
Cálculo.
Disponível
em:
http://www.prof2000.pt/users/4238anibal/tarefa7/ficalu3.htm. Acesso em: 21 jun. 2012, 12:
55: 28.
GRUPO VIRTUOUS, Só Física. DINÂMICA-Leis de Newton. Disponível
em:http://www.sofisica.com.br/conteudos/Mecanica/Dinamica/leisdenewton.php. Acesso em:
06 ago. 2012, 14: 30: 04.
HALLIDAY, D; RESNICK, R; WALKER, J. Fundamentos de Física 1. In: Mecânica.6.ed.
LTC Editora; Rio de Janeiro, RJ, 2002.
51
HALLIDAY, D; RESNICK, R; WALKER, J. Fundamentos de Física 3. In:
Eletromagnetismo.8.ed. LTC Editora; Rio de Janeiro, RJ, 2009.
HALLIDAY; RESNICK; WALKER. Fundamentos de Física.Vol. 1 e 2, 8. ed. 2009.
JUNIOR, F.R; FERRARO, N.G; SOARES, P.A.T. Os Fundamentos da Física 1. In:
Mecânica. 7.ed.revista e ampliada. Editora Moderna; São Paulo, SP, 1999.
LEMOS, N.A. Mecânica Analítica.2. ed. Editora Livraria da Física. São Paulo, 2007.
NUSSENZVEIG, H.M. Física Básica.In:Mecânica. Vol. 1, 3. ed. Editora Edgard Blücher,
1996.
PORTUGAL, P.J,2007. Força e Movimento. In: Dinâmica de um sistema de partículas.
Disponível em: http://profs.ccems.pt/PauloPortugal/PHYSICA/indice.htm. Acesso em: 03
ago. 2012, 16: 27: 09.
RAMALHO; NICOLAU; TOLEDO. Os Fundamentos da Física.In: Mecânica, Vol. 1, 7. ed.
São Paulo. Editora Moderna,1999.
RODRIGUES,
A,
2006.
Dinâmica.In:
Força
Elástica.
Disponível
em:
http://www.ebah.com.br/content/ABAAABdy8AG/dinamica-aula. Acesso em: 24 set. 2012,
18: 06: 24.
RODRIGUES, C.G. Métodos Matemáticos para Licenciatura. Goiânia, 2007.
SILVA,
M.A,
2012.
Capacitores.
Disponível
em:
http://www.brasilescola.com/fisica/capacitores.htm. Acesso em: 27 set. 2012, 17: 35: 32.
SYMON, K.R. Mecânica.3. ed. Editora Campus LTDA, 1982.
TRIPPER, P.A. Física Para Cientistas e Engenheiros. In: Mecânica, Oscilações e Ondas,
Vol. 1, 4. ed. editora LTC, 2000.
52
UNIVATES, 2012. Circuitos Elétricos. In: Leis de Kirchoff. Disponível em:
http://ensino.univates.br/~husemann/Eng/Circuitos_I/AULA2_CIRCUITOS_ELETRICOS_I.
pdf. Acesso em: 01 out. 2012, 16: 27: 05.
Download