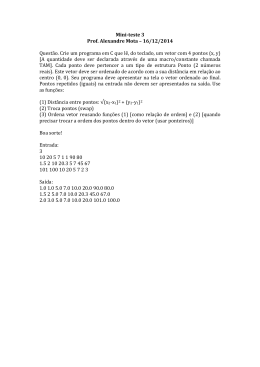
www.fisicaexe.com.br Sobre um eixo horizontal AB estão rigidamente montados uma polia C de diâmetro d, e uma haste D de massa m 2 . Sobre a polia está enrolado um cabo em cuja extremidade prende-se um corpo E de massa m 1 . Na extremidade da haste D adapta-se um cilindro F de massa m 3 e altura h. Na posição de equilíbrio a haste forma um ângulo θ com a vertical. São desprezados a massa da polia e do cabo, considera-se o cabo inextensível e o eixo e a haste não sofrem torções. Determinar: a) O comprimento da haste; b) Calcule o comprimento da haste para os seguintes valores, m 1 = 200 kg, d = 60 cm, m 2 = 12 kg , m 3 = 100 kg, h = 20 cm e θ = 30 o. Dados do problema • • • • • • diâmetro da polia C: massa do corpo E: massa da haste D: massa do cilindro F: altura do cilindro F: ângulo formado entre a vertical e o sistema haste+cilindro: d; m1 ; m2 ; m3 ; h; θ. Esquema do problema Adotamos que a aceleração da gravidade no local é igual a g. Suponhamos que inicialmente a corda está enrolada na polia e o sistema haste+cilindro está na vertical. Sob a ação da força peso P 1 o corpo de massa m 1 começa a descer, a corda começa a desenrolar e faz girar a polia, que está rigidamente ligada a barra AB onde passa a atuar o torque N 1. figura 1 Com a rotação do eixo AB o sistema haste+cilindro começa a girar, considerando as forças peso da haste e do cilindro, P 2 e P 3 respectivamente, aplicadas ao centro de massa de cada corpo para que o sistema todo permaneça em equilíbrio estas forças deve gerar um torque, N 2 + N 3 de mesmo módulo e direção e com sentido contrário ao torque N 1, de tal forma que a somatória dos torques seja nula. Adotamos x como sendo o comprimento da haste a ser determinado. Solução 1 www.fisicaexe.com.br a) O torque de uma força é dado por N = r×F (I) No sistema da polia temos o vetor posição (r 1) dado pelo raio da polia e a força (F) representada pela força peso devido à massa m 1 (P 1), conforme figura 2-A. Aplicando a expressão (I), temos N 1 = r 1×P 1 a força peso será dada por P 1 = m 1 g , substituindo na expressão acima N 1 = r 1×m 1 g N 1 = m 1 r 1×g Aplicando a regra da mão direita para o produto vetorial (levando o vetor r 1 em direção ao vetor g – figura 2-B) obtemos o vetor N 1 perpendicular a estes dois, figura 2-C. figura 2 Os vetores r 1 e g são perpendiculares entre si, portanto, em módulo temos N 1 = m 1 r 1 g sen o raio da polia será r 1 = π 2 d π e sen = 1 , então temos 2 2 N1 = m1 d g 2 (II) Na haste temos o vetor posição (r 2) e a força (F) representada pela força peso devido à massa m 2 da haste (P 2), conforme figura 3-A. Aplicando a expressão (I), temos N 2 = r 2 ×P 2 a força peso será dada por P 2 = m 2 g , substituindo na expressão acima N 2 = r 2 ×m 2 g N 2 = m 2 r 2 ×g figura 3 2 www.fisicaexe.com.br Aplicando a regra da mão direita para o produto vetorial (levando o vetor r 2 em direção ao vetor g – figura 3-B) obtemos o vetor N 2 perpendicular a estes dois, figura 3-C. Os vetores r 2 e g formam um ângulo θ entre si, portanto, em módulo temos N 2 = m 2 r 2 g sen θ o vetor posição r 2 localiza o centro de massa da haste, supondo que a haste seja homogênea o centro de massa está na metade do comprimento, assim o módulo do vetor posição será x r 2 = , então temos 2 N2 =m2 x g sen θ 2 (III) No cilindro temos o vetor posição (r 3) e a força (F) representada pela força peso devido à massa m 3 do cilindro (P 3), conforme figura 4-A. Aplicando a expressão (I), temos N 3 = r 3 ×P 3 a força peso será dada por P 3 = m3g , substituindo na expressão acima N 3 = r 3 ×m 3 g N 3 = m 3 r 3 ×g Aplicando a regra da figura 4 mão direita para o produto vetorial (levando o vetor r 3 em direção ao vetor g – figura 4-B) obtemos o vetor N 3 perpendicular a estes dois, figura 4-C. Os vetores r 2 e g formam um ângulo θ entre si, portanto, em módulo temos N 3 = m 3 r 3 g sen θ o vetor posição r 3 localiza o centro de massa do cilindro, supondo que a haste seja homogênea o centro de massa está na metade da altura do cilindro somado ao comprimento x da haste, h assim o módulo do vetor posição será r 3 = x , então temos 2 N3 =m3 h x 2 g senθ (IV) Para que o sistema permaneça em equilíbrio temos a condição 3 ∑Ni =0 i=1 adotando o sentido do torque N 1 como positivo, temos N 1 −N 2 −N 3 = 0 (V) substituindo as expressões (II), (III) e (IV) em (V), obtemos d x h g −m 2 g sen θ−m 3 x g sen θ = 0 2 2 2 d x h m 1 g−m 2 g sen θ−m 3 g sen θ−m 3 x g sen θ = 0 2 2 2 m1 3 www.fisicaexe.com.br multiplicando toda a expressão por 2, temos d x h g−m 2 g sen θ−m 3 g sen θ−m 3 x g sen θ = 0 2 2 2 m 1 d g −m 2 x g senθ−m 3 h g senθ−2 m 3 x g sen θ = 0 m 1 d g −m 3 h g sen θ−x g sen θ m 22 m 3 = 0 x sen θ m 2 2 m 3 = m 1 d −m 3 h sen θ m1 x= x 2 m 1 d −m 3 h senθ m 22 m 3 sen θ b) Convertendo o diâmetro da polia e a altura do cilindro dados em centímetros (cm) para metros (m) usado no Sistema Internacional (S.I.) o e lembrando que θ = 30 = d = 60 cm . 1m 60 = m = 0,6 m 100 cm 100 h = 20 cm . 1m 20 = m = 0,2 m 100 cm 100 π π , então, sen = 0,5 , usando a expressão obtida no item (a) e 6 6 os valores dados, temos 200 . 0,6−100 . 0,2. sen x= 122 . 100 . sen π 6 120−20. 0,5 x= 12 200 . 0,5 x = 1,04 m 4 π 6
Download