MÉTODOS ESTATÍSTICOS
APLICADOS AO SEGURO
AGRÍCOLA
Copyright Vitor Ozaki 2006
Outline
1 Problemas no mercado de seguro agrícola
2 Complexa precificação
3 Tendência e heteroscedasticia
4 Modelagem Estatística
5 Cálculo Atuarial
6 Metodologias Atuariais
6.1 O modelos Gaussiano
6.2 Mistura finita de distribuições
6.3 Modelo temporal
6.4 Modelo espacial
6.5 Modelo espaço-temporal
7 Resultados
8 Conclusões
Problemas no mercado de seguro agrícola
RISCO MORAL
• As seguradoras são incapazes de monitorar
perfeitamente os segurados;
• Produtores podem mudar suas práticas culturais
após a contratação do seguro;
• O seguro subvencionado resulta em aumento do
risco?
Copyright Vitor Ozaki 2006
Problemas no mercado de seguro agrícola
Erros na precificação? Implicações para a SELEÇÃO
ADVERSA
• Se a seguradora precificar com base no risco
médio dos produtores, então ocorrem duas
situações:
• a seguradora irá cobrar um prêmio maior do que
aquele que os produtores de baixo risco estarão
dispostos a pagar; e,
• a seguradora estará cobrando um prêmio menor do
que aquele que os produtores de alto risco estarão
dispostos a pagar.
Copyright Vitor Ozaki 2006
Problemas no mercado de seguro agrícola
• Conseqüentemente, os produtores de baixo
risco serão desencorajados a comprar o seguro,
restando apenas aqueles com maior risco;
• As indenizações aumentam resultando em
perdas para a seguradora;
Copyright Vitor Ozaki 2006
Problemas no mercado de seguro agrícola
RISCO SISTÊMICO
• Para o mercado segurador a ocorrência de tais
eventos catastróficos dificulta sobremaneira a
continuidade das seguradoras no ramo de
atividade;
• No caso agrícola, esses eventos apresentam
elevada severidade, e sua ocorrência atinge não
apenas uma propriedade rurais mas milhares de
propriedades em uma grande extensão territorial.
Copyright Vitor Ozaki 2006
Problemas no mercado de seguro agrícola
• Por esse motivo diz-se que o risco é altamente
correlacionado;
• Esse fato viola um dos princípios básicos do
mercado de seguros: as unidades expostas
devem ser homogêneas e independentes;
Copyright Vitor Ozaki 2006
Problemas no mercado de seguro agrícola
• Como lidar com isso?
Resseguro (O mercado consegue assimilar?);
Constituir reservas;
Resseguro governamental;
• Para a seguradora, constituir reservas e ressegurar
suas operações podem não ser o suficiente para
suportar um evento catastrófico;
Copyright Vitor Ozaki 2006
Problemas no mercado de seguro agrícola
•
•
•
•
•
•
Complexa precificação;
Alta exposição catastrófica;
Alto custo de fiscalização e peritagem;
Graves problemas de fraudes;
Severa antiseletividade;
Inexperiência e falta de profissionais
especializados no ramo;
• Ausência de normatização;
• Falta de dados estatísticos;
Copyright Vitor Ozaki 2006
Complexa Precificação
• A metodologia deve levar em conta diversas
idiossincrasias presentes nos dados de
produtividade agrícola:
• Dificuldades de ordem amostral
Neste caso o tamanho das séries históricas de
produtividade* é relativamente pequeno,
impossibilitando a detecção de qualquer tipo de
padrão e a aplicação dos testes estatísticos
convencionais;
Copyright Vitor Ozaki 2006
Complexa Precificação
• Problemas de correlação espacial
Decorre do fato de que propriedades
(municípios) mais próximas apresentam maior
dependência espacial em relação a
propriedades (municípios) mais afastadas;
Copyright Vitor Ozaki 2006
Complexa Precificação
Existem versões alternativas do Teorema do
Limite Central, para processos espaciais, que
suportam a suposição de normalidade;
A suposição de normalidade é aceitável quando
a dependência espacial se reduz rapidamente
quando a distância aumenta (Guyon, 1995);
Copyright Vitor Ozaki 2006
Complexa Precificação
• Correlação serial
Quando a produtividade em anos anteriores está
correlacionada com a produtividade no ano
atual;
• Presença de tendência
A produtividade observada em 1980, por
exemplo, não pode ser comparada com a
produtividade observada em 2004;
Copyright Vitor Ozaki 2006
Complexa Precificação
• Heteroscedasticidade
Situação em que os dados apresentam
variabilidade não constante. Todos estes fatores
dificultam sobremaneira a análise dos dados;
• Ignorá-los podem levar a resultados
completamente equivocados.
Copyright Vitor Ozaki 2006
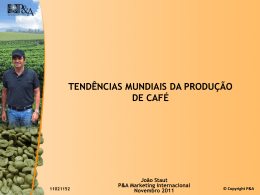
Tendência e Heteroscedasticidade
• O problema é que o processo gerador dos
dados de produtividade não é constante, mas
varia com o tempo;
• O nível da produtividade agrícola muda com
o passar do tempo;
• A próxima figura ilustra as peculiaridades
supramencionadas;
Copyright Vitor Ozaki 2006
Tendência e Heteroscedasticidade
y
t
Copyright Vitor Ozaki 2006
Tendência e Heteroscedasticidade
• Se os desvios da tendência são
proporcionais ao nível da produtividade
agrícola então a suposição de
coeficiente de variação constante é
suportada;
• Nesse caso, erros proporcionais εt
serão calculados dividindo o termo de
erro ut pelo seu respectivo valor predito;
Copyright Vitor Ozaki 2006
Tendência e Heteroscedasticidade
• Os valores resultantes serão homoscedásticos
(Goodwin e Ker, 1998).
• Para expressar a produtividade em termos da
tecnologia de 2005 multiplicar (1 + erros
proporcionais) pela produtividade observada em
2005 resultando em produtividades
normalizadas yn.
yn = (1 + εt) y2004
Copyright Vitor Ozaki 2006
Tendência e Heteroscedasticidade
• Por outro lado, se os erros forem não
proporcionais ao nível da produtividade
(coeficiente de variação não-constante);
• Então a produtividade normalizada será
calculada somando o termo de erro à
produtividade observada em 2005;
yn = ut + y2004
Copyright Vitor Ozaki 2006
Modelagem estatística dos dados de
produtividade agrícola
• A modelagem estatística de dados de
produtividade agrícola tem sido um
ponto bastante controverso;
• Diversas abordagens têm sido
consideradas:
Copyright Vitor Ozaki 2006
Modelagem estatística dos dados de
produtividade agrícola
• Métodos Semiparamétricos (Ker and
Coble, 2003);
• Modelos Não-paramétricos (Goodwin
and Ker, 1998; Turvey and Zhao, 1999;
Ozaki, 2005); and,
• Bayes Empírico não-paramétrico (Ker
and Goodwin, 2000).
Copyright Vitor Ozaki 2006
Modelagem estatística dos dados de
produtividade agrícola
• Dentro da abordagem paramétrica,
diversos autores concluem que a
produtividade agrícola segue uma
distribuição Normal (Just and Weninger,
1999);
• Entretanto, outros pesquisadores
encontraram evidências contra a
Normalidade (Day, 1965; Taylor, 1990;
Ramirez, 1997; and, Ramirez et al., 2003);
Copyright Vitor Ozaki 2006
Modelagem estatística dos dados de
produtividade agrícola
Outras abordagens incluem :
• A distribuição Beta (Nelson and Preckel, 1989);
• Transformações Seno Hiperbólico Inverso
(Moss and Shonkwiler, 1993), and;
• Distribuições Gamma (Gallagher, 1987).
Copyright Vitor Ozaki 2006
Cálculo Atuarial
• Antes de abordar a metodologia atuarial é
interessante explorar os componentes da
taxa de prêmio;
• Sabe-se que:
Prêmio = (taxa de prêmio) x (responsabilidade)
Taxa de
prêmio
=
custo
esperadoda +
perda
custos adicionais
responsabilidade
Copyright Vitor Ozaki 2006
Cálculo Atuarial
• Ainda:
custos
adicionais
fundo de
= reservas +
catástrofe
custo da
perda
indenização
=
custo
+
+ retornos
admin.
responsabilidade
Copyright Vitor Ozaki 2006
Cálculo Atuarial
Custo esperado da perda
• Geralmente, para longas séries de dados, o
custo histórico da perda é usado como
estimativa para o custo esperado da perda;
• Exemplo: $30 milhões em indenizações para
cada $100 milhões em responsabilidade →
custo esperado da perda = 0.3;
Copyright Vitor Ozaki 2006
Cálculo Atuarial
• Para riscos catast. (seca) a variância ao
redor de 3% seria alta e, provavelmente,
assimétrica para a direita;
• Caso a seca ocorra, o custo da perda é alto;
• Caso a seca não ocorra, o custo da perda é
baixo;
Copyright Vitor Ozaki 2006
Cálculo Atuarial
Reservas
• As reservas financeiras são necessárias
caso as indenizações superem os prêmios
recolhidos em dado ano;
• Quanto maior a variância ao redor do custo
esperado da perda, maior a necessidade de
se constituir reservas;
• Consequentemente, para cobrir riscos
considerados catast., essas reservas serão
maiores do que riscos não-catastróficos;
Copyright Vitor Ozaki 2006
Cálculo Atuarial
Fundo de catástrofe
• Essa reserva deve ser adicionada à taxa
quando os eventos são considerados
correlacionados;
• Nesse contexto, o custo da perda pode não
representar precisamente as perdas futuras;
• Eventos de baixa-frequência, alta-severidade
podem ser subestimados ou
superestimados;
Copyright Vitor Ozaki 2006
Cálculo Atuarial
Retorno ao investimento
• Quanto mais variável o retorno ao
investimento, maior deverá ser a taxa média
de retorno demandado pelo investidor
(seguradora);
• Consequentemente, as seguradoras
requerem uma taxa de retorno maior para os
ramos de seguro de alta variabilidade, tais
como, o seguro agrícola;
Copyright Vitor Ozaki 2006
Cálculo Atuarial
• Correlações positivas entre unidades
seguradas reduzem consideravelmente as
propriedades de agregação vitais para o
seguro;
• As seguradoras são forçadas a aumentar
suas reservas e constituir um fundo
catastrófico;
Copyright Vitor Ozaki 2006
Cálculo Atuarial
• Os custos administrativos são relativamente
maiores e há a exigência de elevado retorno
do investimento;
• Todos esses fatores aumentam a taxa de
prêmio no seguro agrícola;
Copyright Vitor Ozaki 2006
Cálculo Atuarial
A taxa de prêmio pura do seguro agrícola será
dado por:
FY (y ) EY [y (Y | y y )]
e
y
e
e
e
Em que:
E é o operador de esperança e F a distribuição
cumulativa da produtividade.
O prêmio do seguro é obtido multiplicando-se a
taxa de prêmio pelo valor segurado.
Copyright Vitor Ozaki 2006
Cálculo Atuarial
• Alguns parâmetros de interesse:
Produtividade esperada;
Variância (risco) da produtividade; e,
Distribuição de probabilidade da produtividade.
• E (perda) = Pr (perda) x E (perda|perda ocorreu)
• Taxa de prêmio = E (perda) / produtividade
garantida
Copyright Vitor Ozaki 2006
Metodologias Atuariais
1. Método empírico
2. Análise paramétrica clássica
•
Distribuição Gaussiana e Beta;
3. Abordagem Não-paramétrica
•
Kernel Estimator ;
4. Modelos Bayesianos
Copyright Vitor Ozaki 2006
1. Método Empírico
• Usualmente, utiliza-se o método empírico
para precificar contratos de seguro;
• Esse método consiste em dividir a perda
média sobre a responsabilidade, resultando
em taxas empíricas;
Copyright Vitor Ozaki 2006
1. Método Empírico
• Desvantagens:
– Para refletir precisamente o custo da
perda é necessário séries históricas
longas;
– Mesmo se existissem tais séries, para o
seguro agrícola seria difícil captar perdas
catastróficas com grande precisão;
– Este método não leva em consideração
nenhuma análise estatística;
Copyright Vitor Ozaki 2006
2. Análise Paramétrica Clássica
Ajuste através das Distribuições:
• Gaussiana
1
f ( y)
exp ( y ) 2 / 2 2
2
•
Beta
( 1)!
f ( y)
y (1 y )
! !
Com parâmetros estimados pelo método da
máxima verossimilhança.
Copyright Vitor Ozaki 2006
2. Análise Paramétrica Clássica
produtividade
Copyright Vitor Ozaki 2006
2. Análise Paramétrica Clássica
produtividade
Copyright Vitor Ozaki 2006
2. Análise Paramétrica Clássica
Copyright Vitor Ozaki 2006
3. Abordagem Não-paramétrica
O estimador kernel da densidade f(y) pode ser
representada como uma convolução da distribuição
amostral, utilizando-se uma função kernel K,
representada por:
fˆ ( y ) K h ( y v)dFn (v)
Em que K h (v) = 1/hK(v/h) and Fn(v) é a função de
distribuição amostral.
Copyright Vitor Ozaki 2006
3. Abordagem Não-paramétrica
• O estimador kernel é a soma de “saltos” (bumps)
localizados em cada observação. A função kernel
determina a forma destes saltos e a janela sua
largura;
• Quanto maior o valor da janela, maior o
alisamento da série (os detalhes tendem a
desaparecer);
• O inverso também é válido, quanto menor o valor
da janela, os saltos terão uma forma de pico,
tornando mais pronunciado os detalhes na
densidade;
Copyright Vitor Ozaki 2006
3. Abordagem Não-paramétrica
• Seja A, B e C vizinhos ao
municípios D. O seguinte
esquema aumenta o
número de observações
em cada série:
D,A,D,B,D,C,D
A
C
D
B
• Em outras palavras, D
terá peso 4/7, e o resto
(A,B,C) 1/7.
Copyright Vitor Ozaki 2006
3. Abordagem Não-paramétrica
• De modo geral, os pesos serão iguais a:
Município central = (N +1) / (2N + 1)
Municípios vizinhos = 1 / (2N + 1)
Em que N é o número de municípios vizinhos.
Copyright Vitor Ozaki 2006
3. Abordagem Não-paramétrica
Copyright Vitor Ozaki 2006
4. Modelos Bayesianos
• A abordagem Bayesiana assume
inicialmente que as observações são
condicionalmente independentes dado os
parâmetros do modelo; e,
• Em em segundo estágio, a dependência é
incorporada através da atribuição de
distribuições à priori aos parâmetros.
Copyright Vitor Ozaki 2006
4. Modelos Bayesianos
• A estrutura hierárquica do modelo permite
incorporar de maneira relativamente simples e
intuitiva o efeito espacial, o efeito temporal e
permite a interação destes dois efeitos, resultando
em modelos espaço-temporais;
• Pode-se por aninhar o efeito espacial dentro do
efeito temporal (permitindo assim, examinar os
padrões do efeito espacial no tempo);
Copyright Vitor Ozaki 2006
4. Modelos Bayesianos
• Considerando a média como sendo idêntica a
E(yit), onde i representa o indexador da variável
espacial e t a variável temporal, tal que i = 1, 2, ...
,S, t = 1, 2 , ..., T e yit será a produtividade no
it ast; being identical to E(yit), where
Wemunicípio
consider the
i nomean
tempo
i
represents the space variable index and t the temporal index. Thus,
yit is the agricultural yield in county i and in time t, where i = 1, 2, ... ,
S and t = 1, 2, ... , T.
yi , t ~ N ( i , t , )
i ,t i yi ,t 1 1 2C t * ui ,t
i
The objective of this portion of the analysis is i to model
the stochastic
mean component, so that it reflects the covariates, the temporal
Copyright Vitor Ozaki 2006
effects, spatial variation and the spatio-temporal relationships
4. Modelos Bayesianos
• O objetivo então será modelar o parâmetro de
média, tal que capte as covariáveis,o efeito
temporal, a variação espacial da produtividade
agrícola e o efeito espaço-temporal;
• Diversos modelos podem ser explorados;
• Trataremos apenas de alguns:
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• A média μit foi suposta ser proveniente de duas
subpopulações ou grupos: um grupo catastrófico
e outro não-catastrófico;
• Entende-se por catastrófico o evento climático
que venha a ocorrer em determinado ano, tal
como seca, excesso de chuva, granizo, etc.
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• Desta forma, caso venha a ocorrer um evento
climático adverso, a produtividade agrícola será
considerada proveniente do grupo catastrófico;
• Caso contrário, considera-se a produtividade
como do grupo não-catastrófico;
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• Caso ocorra um evento climático adverso, a
produtividade será proveniente do grupo
catastrófico;
• Caso contrário, a produtividade será designada
ao grupo não-catastrófico;
• Assim, pode-se pensar na produtidade como
proveniente de uma mistura finita de duas
distribuições;
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• Isso porque eventos catastróficos podem ser
considerados muito menos frequentes e a
produtividade observada, nestes anos ser
muito inferior a de anos regulares (normais);
• Sendo assim, espera-se que o primeiro grupo
tenha massa menor comparado ao segundo
grupo e tal concentração se situe na calda
inferior da primeira.
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• O modelo misto geral pode ser descrito como:
f ( y | 1 ,..., j , 1,..., j ) j 1 j f ( y | j )
J
Em que θj é o vetor de parâmetros, j é o número de
componentes, tal que j = 1, 2, ... , J. e γj o parâmetro
representando a proporção da população atribuída
ao componente j.
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• No caso em que f (y | · ) representa uma
distribuição gaussiana, a eq. (1) pode ser
escrita como:
f ( y / j , , j ) j N ( y / j , )
2
j
2
j
j
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• Alternativamente pode ser introduzido uma
variável indicadora não observada que
identifica qual componente cada observação
é designada;
• Esta variável indicadora I recebe valores
iguais a i quando y é sorteada do j-ésimo
componente;
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• Deste modo, equivalentemente, o modelo
misto em pode ser representado como:
y | I, ~ f(y | I)
I | ~ DCat ( )
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
em que ( I ) = ( , , I )
DCat ( ) é a distribuição categórica e P[I = j] = j , j = 1, … , J.
• Uma distribuição à priori categórica foi
atribuída à I;
Copyright Vitor Ozaki 2006
4.1 Mistura de distribuições
• A priori conjugada será a distribuição Dirichlet,
com hiper-parâmetro α;
f ( )
( j j )
where 0 < qj < 1 and
j ( j )
j
j 1
jq j
q j 1 , j 0 , j = 1, ... J.
Copyright Vitor Ozaki 2006
4.2 Os Modelos Temporais
• Modelos de tendência determinística
p
t l t l ut
l 1
• Modelos de tendência estocástica
t = ut-1 + ut
• Modelos determinísticos e estocásticos
t = yt-1 + 0 + 1t* + 2t*2 + ut
Copyright Vitor Ozaki 2006
4.3 Os Modelos Espaciais
A variável espacial Φi pode ser designada como Φi =
ξi + vi, em que:
vi é denominada variável latente não-estruturada
espacialmente (heterogeneidade) e,
ξi a variável latente estruturada ou correlacionada
espacialmente (clustering).
Copyright Vitor Ozaki 2006
4.3 Os Modelos Espaciais
A variável não-estruturada segue uma distribuição
Normal, de modo que
vi ~ N( , 2 )
e a variável estrutura espacialmente ξi condicional a ξj
, onde j ≠ i, é modelada de modo que
i ~ N( i , 2 / ni)
onde i é a média dos ξi’s e i pertence as áreas
adjancentes.
Copyright Vitor Ozaki 2006
4.3 Os Modelos Espaciais
i | j ~ exp{1 / 2 2 (ii ij j ) 2 }
j i
where φi ≥ 0 is a “sample size” associated with region i and ij ≥ 0 is
the weight reflecting the influence of j on the conditional mean of i .
We let ωij = 1 if j is neighbor of i and 0 otherwise and set φi equal the
number of neighbors of i. Thus, the conditional distribution ξi | ξj
simplifies to i ~ N( i , 2 / ni), where i is the average of the j ’s, in
which j indexes the neighboring sites of i.
Copyright Vitor Ozaki 2006
4.4 Os Modelos Espaço-Temporais
Devid o à p er m u t ab ilid ad e co n d icio n al d ad o o t em p o , a
d ist r ib u ição à p r io r i r esu lt an t e p o d e ser r ep r esen t ad a p o r
(t )
i
iid
~ N( ( t ) , 2 ( t ) );
Co n sid er o u -se p ar a o ef eit o esp acial i(t ) n a i-ésim a r eg ião n o
an o t a p r io r i CAR d ad o o t em p o t .
Assim , i(t ) ~ N( i (t ) , 2 ( t ) / n i), o n d e i (t ) é a m éd ia d as j-ésim as
ár eas ad jan cen t es a i.
Dist r ib u içõ es In ver sa Gam a f o r am co n sid er ad as co m o h ip er p r io r is p ar a 2( t ) e 2( t ) .
Copyright Vitor Ozaki 2006
4.4 Os Modelos Espaço-Temporais
A little different spatio-temporal model was fitted to the data set. We
also allow the spatial effects to be nested within the temporal
process, such that the parameters of the deterministic trend ( ’s) are
modeled using the CAR prior.
Intuitively, one can think of the trend parameters as being correlated
across space, given time. Thus we have the following general
expression for the mean component it 0(i ) 1(i )t * 2(i )t *2 uit . As
was described in the previous subsection, we can incorporate the
stochastic term in the general expression.
Copyright Vitor Ozaki 2006
4.4 Os Modelos Espaço-Temporais
• No modelo a variável espacial está aninhada
ao efeito temporal (permitindo checar a
variação espacial no tempo);
• Geralmente, utiliza-se o algoritmo MCMC para
estimar os parâmetros do modelo;
• Após a estimação deve-se checar a
convergência e mistura de todos os
parâmetros;
Copyright Vitor Ozaki 2006
5 Seleção de Modelos
• Trabalhando no espaço de preditivas, a
penalidade surge sem a necessidade de
definições assintóticas;
• Intuitivamente, pode-se dizer que bons
modelos devem realizar predições
próximas ao que foi observado em
experimentos idênticos.
5 Seleção de Modelos
• O objetivo é minimizar a perda preditiva a
posteriori, denominada erro predito
quadrático;
• A distribuição preditiva à posteriori, é
mostrado abaixo:
f ( ynew | yobs ) f ( ynew | M ) p( M | yobs )dM
5 Seleção de Modelos
• Em que M representa o conjunto de todos
os parâmetros em certo modelo e ynew é a
réplica do vetor de dados observados yobs.
• O objetivo é escolher aquele que minimiza
a esperança da função de discrepância,
condicional a yobs e Mi, onde o subscrito i
representa todos os parâmetros em
determinado modelo i.
5 Seleção de Modelos
• Para modelos gaussianos, a função de
discrepância e Dm, respectivamente, é
dada por:
d(xnew, xobs) = (xnew - xobs)T(xnew - xobs)
5 Seleção de Modelos
Table 1. Model Selection Criteria
M
Dm
Model for uit
1
667800
i yi,t 1 1 2Ct *
2
3
4
5
6
7
8
9
10
673200
700100
728500
736800
737900
739900
751400
751700
761300
i yi,t 1 1C 2Ct *
i
i
i
i
R-W
i yi,t 1 1i 2i t * vi
AR(1)
i yi ,t 1 i
i yi,t1 it
i yi,t 1 1i 2i t * it
i yi,t 1 1i 2i t * i
Exchangeable model
Copyright Vitor Ozaki 2006
• Modelo Bayesiano:
MODEL
{
for (i in 1:M)
{
for (t in p+1:N)
{
y[i, t] ~ dnorm(mu[i, t], tau)
mu[i, t] <- rho[i] * y[i, t - 1] + beta0[i] + beta1[i] * (t - 7)
}
#Exchangeable
rho[i] ~
beta0[i]
beta1[i]
prior for the rho's
dnorm(rho0, tau.r)
~ dnorm(0.0,1.0E-6)
<- zeta1[i] + b1
#Compute the predictive error:
pred.error[i] <- y[i,N-1]-y[i,N-2]
#Premium rates by counties:
for(j in 1:5){
PR1[i,j] <- max(1-(y[i,N-1]/(lmda[j]*y[i,N-2])),0)
}
}
#CAR priors for the zeta's
zeta1[1: M] ~ car.normal(neigh[ ], weig[ ], num[ ], tau.S)
#Weights for the CAR prior:
for (k in 1:Sum)
{
weig[k] <- 1
}
#Priors for fixed effects:
rho0 ~ dnorm(0, 0.1)
tau.r ~ dgamma(0.1, 0.1)
b1 ~ dnorm(0.0, 1.0E-3)
tau ~ dgamma(0.1, 0.001)
sigma <- 1/sqrt(tau)
tau.S ~ dgamma(aS, bS)
sigma.S <- 1/sqrt(tau.S)
#Mean squared predictive error:
MSPE <- inprod(pred.error[], pred.error[])/M
}
Copyright Vitor Ozaki 2006
Derivação da Taxa de Prêmio
Premium Rate (PR) =
F (y e ) E[y e ( y | y y e )]
y e
If y* = y/αye
PR = P(y* < 1)[1 – E(y*| y* < 1)]
If U = 1 - y*
PR = P(U > 0)[(1 – E(1 – U|1 – U < 1)]
PR = P(U > 0)[(1 – E(1 – U|U > 0)]
PR = P(U > 0) E(U|U > 0)
E(U | U 0)
u f(u)du
0
f(u)du
0
u f(u)du
PR = P(U > 0)
0
f(u)du
0
But P(U > 0) =
f(u)du
0
PR =
u f(u)du
0
PR =
u
I ( u 0)f(u)du
PR = E[U I(U > 0)]
Copyright Vitor Ozaki 2006
Modelo Gráfico
c
rho.mu
kappa.sigma
zeta2[i]
zeta1[i]
rho[i]
kappa.tau
mu[i, t]
neigh
rho.tau
y[i,t-1]
tau
kappa[i]
wei
y[i, t]
sigma
num
for(t IN 2 : T)
for(i IN 1 : S)
Copyright Vitor Ozaki 2006
Resultados dos modelos
Copyright Vitor Ozaki 2006
Taxas de prêmio – soja
Tabela 1. Taxas de prêmio (%) para soja, no município de Cascavel, calculadas pelo
método empírico
Série Ajustada
Série Não-ajustada
NC
Normal
Beta
d = 30
d = 40
d = 30
d = 40
70
0,0513
0,1169
0,6120
0,6759
0,3501
1,1364
75
0,0830
0,2118
1,0840
1,1121
0,6965
1,8961
80
0,3813
0,5099
1,4970
1,6848
1,2288
2,9264
85
0,7263
0,9049
2,0600
2,5404
1,9712
4,4149
90
1,3001
1,5077
2,9120
3,5944
3,1059
6,3614
Copyright Vitor Ozaki 2006
Taxas de prêmio – soja
Tabela 2. Taxas de prêmio (%) para soja, no município de Cascavel, calculadas pelo
método não-paramétrico
Série Ajustada
Série Não-ajustada
NC
Normal
Beta
d = 30
d = 40
d = 30
d = 40
70
0,0689
0,1400
0,7198
0,8979
0,3501
1,1364
75
0,1807
0,2819
1,1814
1,4252
0,6965
1,8961
80
0,4244
0,5561
1,7041
2,0766
1,2288
2,9264
85
0,8518
1,0213
2,4641
3,0094
1,9712
4,4149
90
1,5062
1,7025
3,4764
4,2388
3,1059
6,3614
Copyright Vitor Ozaki 2006
Taxas de prêmio – milho
Tabela 3. Taxas empíricas de prêmio (%) para milho, no município de Guarapuava
Série Ajustada
Série Não-ajustada
NC
Normal
Beta
d = 30
d = 40
d = 30
d = 40
70
3,224
2,260
2,7038
5,4815
2,083
3,635
75
4,355
3,470
3,5492
6,8271
2,791
4,739
80
5,797
4,960
4,2889
8,0417
3,778
6,217
85
7,643
6,280
5,0048
9,1484
4,901
7,963
90
9,403
7,450
6,3087
10,1873
6,330
9,815
Copyright Vitor Ozaki 2006
Taxas de prêmio – milho
Tabela 4. Taxas de prêmio (%) para milho, no município de Guarapuava, calculadas pelo
método não-paramétrico
Série Ajustada
Série Não-ajustada
NC
Normal
Beta
d = 30
d = 40
d = 30
d = 40
70
4,518
3,270
2,7993
6,4311
2,083
3,635
75
5,706
4,280
3,6722
7,5549
2,791
4,739
80
7,021
5,400
4,5412
8,6799
3,778
6,217
85
8,431
6,540
5,5478
9,9206
4,901
7,963
90
9,906
7,790
6,7250
11,2357
6,330
9,815
Copyright Vitor Ozaki 2006
Taxas de prêmio – trigo
Tabela 5. Taxas empíricas de prêmio (%) para o trigo, no município de Tibagi
Série Ajustada
Série Não-ajustada
NC
Normal
Beta
d = 30
d = 40
d = 30
d = 40
70
2,9897
2,3477
2,7410
2,1906
1,1889
2,4382
75
3,7435
3,0671
3,6470
3,0301
1,7825
3,4711
80
4,6911
3,9635
4,7255
4,1162
2,5453
4,7907
85
5,7267
4,9860
6,0738
5,4861
3,5976
6,4816
90
7,1103
6,4530
7,5325
6,9222
4,9642
8,4299
Copyright Vitor Ozaki 2006
Taxas de prêmio – trigo
Tabela 6. Taxas de prêmio (%) para o trigo, no município de Tibagi, calculadas pelo
método não-paramétrico
Série Ajustada
Série Não-ajustada
NC
Normal
Beta
d = 30
d = 40
d = 30
d = 40
70
3,4987
2,8571
3,7526
3,1213
1,1889
2,4382
75
4,3912
3,7330
4,7152
4,0751
1,7825
3,4711
80
5,4253
4,6800
5,8450
5,1020
2,5453
4,7907
85
6,5087
5,8878
7,0129
6,4051
3,5976
6,4816
90
7,8486
7,2912
8,4467
7,8854
4,9642
8,4299
Copyright Vitor Ozaki 2006
Taxas de prêmio – milho
Tabela 7. Taxas de prêmio atuarialmente justas (%), calculadas para os municípios de
Castro, Ponta Grossa, Marilândia do Sul, Tibagi, Catanduvas e Rolândia
através do modelo Bayesiano
α (%)
Município
70
75
80
85
90
Castro
0,01389
0,08361
0,31770
0,89650
2,04100
Catanduvas
0,01684
0,09556
0,34150
0,90490
1,92000
Marilândia do Sul
0,01284
0,07567
0,31400
0,89860
2,00700
Ponta Grossa
0,00564
0,03877
0,17770
0,55270
1,32600
Rolândia
0,00104
0,01288
0,06320
0,22030
0,59290
Tibagi
0,01630
0,09599
0,35610
0,98040
2,12000
Copyright Vitor Ozaki 2006
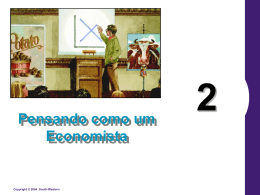
Taxas de prêmio – Método NP
Milho Proc1 40 NP 90
N
W
E
S
100
0
100
200 Miles
2.Taxas de Prêmio
municípios não incluídos
1.291 - 3.479
3.479 - 5.666
5.666 - 7.854
7.854 - 10.041
10.041 - 12.229
Copyright Vitor Ozaki 2006
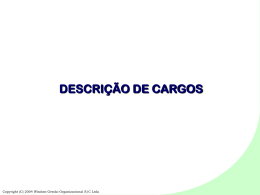
Taxas de prêmio – Método Bayesiano
Copyright Vitor Ozaki 2006
6 Abordagem Bayesiana
• Under the Bayesian approach spatial and
temporal dependence can be modeled as
part of the model;
• Premium rates can be determined directly
through the MCMC simulation;
• Thus, uncertainty is taking into account
when calculating rates;
• Insurance companies must consider all the
special features of the agriculture when
pricing a crop insurance contract;
Implicações para as seguradoras
Tabela 1. Taxas de prêmio (%) para soja, no município de Cascavel, calculadas pelo
método empírico
Série Ajustada
Série Não-ajustada
NC
Normal
Beta
d = 30
d = 40
d = 30
d = 40
70
0,0513
0,1169
0,6120
0,6759
0,3501
1,1364
75
0,0830
0,2118
1,0840
1,1121
0,6965
1,8961
80
0,3813
0,5099
1,4970
1,6848
1,2288
2,9264
85
0,7263
0,9049
2,0600
2,5404
1,9712
4,4149
90
1,3001
1,5077
2,9120
3,5944
3,1059
6,3614
Copyright Vitor Ozaki 2006
Implicações para as seguradoras
•
Implicações na prática:
–
90% da produtividade esperada assegurada;
–
Responsabilidade média segurada em uma carteira
composta por 1 mil produtores: R$ 1 mi;
–
Taxa de prêmio (método empírico): 1,30%
–
O prêmio médio será igual a: R$ 13.000
–
Taxa de prêmio (método paramétrico):3,11%
–
O prêmio médio será igual a: R$ 31.100
–
Perda média no prêmio: R$ 18.100
PERDAS TOTAIS: R$ 18,1 milhões
Copyright Vitor Ozaki 2006
Obrigado!
Copyright Vitor Ozaki 2006
Download