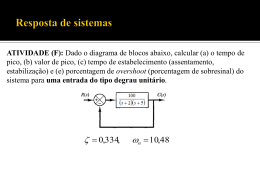
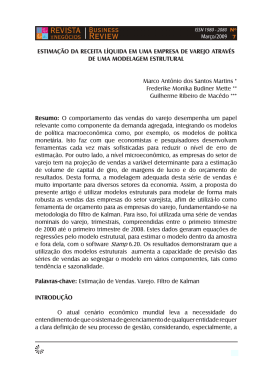
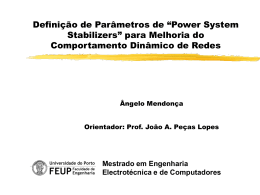
ESTIMAÇÃO DE MODO DOMINANTE DO SISTEMA INTERLIGADO BRASILEIRO VIA FILTRO DE KALMAN ESTENDIDO USANDO DADOS AMBIENTES OBTIDOS DE UNIDADES DE MEDIÇÃO FASORIAL PEDRO ELIAS WEBER DE DEUS AMARAL1*, FRANCISCO D. FREITAS1#, LUÍS FILOMENO DE J. FERNANDES2. 1. Departamento de Engenharia Elétrica - Campus Darcy Ribeiro, Universidade de Brasília Brasília, DF, Brasil - CEP:70910-900 E-mails: [email protected]*, [email protected]# 2. Faculdade do Gama (FG) - Campus do Gama, Universidade de Brasília Brasília, DF, Brasil - CEP:70900-900 E-mail: [email protected] Abstract This paper proposes a technique for parameter estimation from field signals. These signals are obtained from phasor measurement units (PMUs) in power systems. A methodology based on the extended Kalman filter was developed and applied to the parameter estimation problem. In this work, the parameters are related to the dominant modes of the observed signals. The methodology performance is evaluated through experiments by using data which are obtained from PMUs at different sites in Brazil. From these experiments, the main dominant mode of the interconnected Brazilian power system is identified. Keywords Power systems, synchronized phasor measurements, ambient data, extended Kalman filter. Resumo Este artigo propõe uma técnica para a estimação de parâmetros a partir de sinais reais medidos em unidades de medição fasorial em sistemas de potência. Com esta finalidade, desenvolve-se metodologia na qual é feita aplicação do filtro de Kalman estendido para a estimação dos parâmetros. Os parâmetros estão relacionados a modos dominantes dos sinais medidos. O desempenho da metodologia é avaliado mediante testes considerando dados medidos em unidades de medição fasorial localizadas em diferentes locais no Brasil. A partir desses testes, identifica-se o principal modo dominante presente no sistema interligado brasileiro. Palavras-chave Sistemas de potência, medição fasorial sincronizada, dados ambientes, estimação de parâmetros, filtro de Kalman estendido. 1 Introdução Dados obtidos de unidades de medição fasorial (Phasor Measurament Unit – PMU) têm sido utilizados para estimação de modos de oscilação eletromecânicos em sistemas elétricos de potência (Decker et al., 2006; Vanfretti et al., 2011; Prioste et al., 2010; Jeremias et al., 2012). O advento de novas tecnologias de processadores, a transmissão de dados via Internet, e o uso de dispositivos que permitem a sincronização de dados, como o Global Positioning System (GPS), têm tornado viável medição de grandezas em locais bastante remotos. Um exemplo de projeto bem sucedido desta natureza é o identificado em (Medfasee, 2015). Neste projeto, as PMUs são conectadas à rede de baixa tensão em laboratórios de diferentes universidades brasileiras. Os sinais medidos das PMUs permitem que algumas grandezas características do sistema possam ser estimadas. Dados de ângulo ou de frequência são utilizados para avaliação de características dinâmicas do sistema (Yang et al., 2015). Muitos trabalhos destacam o cálculo de modos dominantes de oscilação eletromecânicos. A partir desta informação é possível se ter uma panorâmica preliminar sobre o estado dinâmico do sistema a partir da análise de estabilidade a pequenas perturbações. As oscilações bem amortecidas, em geral, são características dos sistemas elétricos na maior parte do tempo de operação. No entanto, no curto período em que são pouco amortecidas, ou mesmo instáveis, as oscilações eletromecânicas podem vir a colocar em risco a segurança da operação do sistema. Este fato, pode levar a restrições de fluxo de potência em linhas de transmissão e até ao colapso do sistema (Vanfretti et al., 2011). Assim, a identificação dessas oscilações a partir de grandezas medidas em PMUs tem sido objeto de diversas pesquisas. Alguns trabalhos (Yang et al., 2015) priorizam investigações com base em sinais transitórios (ringdown), as quais são originários de eventos causados por grandes perturbações, como curtoscircuitos, perda de algum equipamento etc. Mas, na prática, o sistema opera grande parte do tempo sob excitação de ruído ambiente, causado principalmente por chaveamento permanente de cargas. Neste sentido, utilizar dados ambientes ao invés de provenientes de ringdown para estimação instantânea do estado do ponto de operação do sistema torna-se uma importante contribuição para o setor elétrico. Este artigo propõe uma técnica para estimação de modo dominante de um sistema elétrico, a partir de dados ambientes provenientes de PMU. A técnica para estimação de parâmetros utiliza abordagem baseada no filtro de Kalman estendido (FKE). Esta abordagem permite a observação da variação dos parâmetros do modo dominante no tempo com modelos de ordem reduzida. A aplicação do método é feita para estimar o modo de oscilação mais dominante no sistema elétrico brasileiro com configuração atual. Todas as medições em PMU são realizadas em laboratórios de algumas universidades brasileiras, no lado de baixa tensão. Os resultados das medições, na forma sincronizada, ficam acessíveis em um concentrador de dados fasoriais ( phasor data concentrator PDC), instalado na UFSC. 2 Dados de Medição Fasorial O Sistema Interligado Nacional( SIN) é composto principalmente por diversas centrais de geração, linhas de transmissão de energia e pelas cargas dos consumidores, localizados em todo o território nacional. Este, assim como outros sistemas elétricos de potência, estão sujeitos a oscilações eletromecânicas locais e remotas provocadas pelas interações elétricas entre as unidades de geração, por perturbações de diversas naturezas em grande ou pequena escala. Com o objetivo de monitorar um indicador dessas oscilações eletromecânicas, este trabalho apresenta um método de detecção dos modos de oscilação do SIN a partir de sinais amostrados em PMUs. As PMUs cujos dados são utilizados neste trabalho, foram instalados no âmbito do Projeto de Pesquisa Medfasee, sob responsabilidade da Universidade Federal de Santa Catarina (Decker et al., 2006; Medfasee, 2015). Os referidos PMUs disponibilizam os sinais em 110V e 220V a uma frequência de 60 amostras por segundo e com sincronização temporal por Global Positioning System (GPS). Ficou demonstrada em diversos trabalhos (Prioste et al., 2010; Jeremias et al., 2012; Decker et al., 2006) a eficácia dos dados fasoriais coletados em baixa tensão para estimação da estabilidade do ponto de operação do sistema. Utilizando este fundamento, e com base na estimação de parâmetros via FKE, a partir de dados fasoriais ambientes, é que este trabalho embasa sua contribuição conforme será discutido na sequência. ção, respectivamente. As variáveis aleatórias são caracterizadas como ruído branco Gaussiano, com média nula e descorrelacionadas, com variâncias de modelo 𝑸𝟏 ∈ ℝ𝑛×𝑛 e de medição de saída 𝑹 ∈ ℝ𝑞×𝑞 . 3.1 Estimação de Estados via Filtro de Kalman A estimação de estados via FK discreto é dividida, essencialmente, em duas etapas (Welch & Bishop, 2006). Na primeira, chamada de predição, é feita uma estimação dos estados do sistema para a amostra (k+1) com base nos valores dos estados obtidos até a amostra k. Na segunda etapa, chamada de correção, os valores de xk, estimados na etapa de predição, são corrigidos com base em procedimento denominado inovação. As equações que descrevem a etapa de predição do algoritmo do FK são as seguintes: �𝑘 + 𝑩𝒖𝑘 �− 𝒙 𝑘+1 = 𝑨𝒙 − = 𝑨𝑷𝑘 𝑨𝑇 + 𝑸1 𝑷𝑘+1 (3) (4) �𝑘+1 . �− em que 𝒙 𝑘+1 é a predição da estimação 𝒙 A matriz 𝑷𝑘 representa a covariância do erro das estimativas dos estados à amostra k, enquanto 𝑷− 𝑘+1 é a estimativa desta matriz para a amostra (k+1). Assume-se que os ruídos no processo e nas medições têm probabilidade de distribuição normal, com covariâncias Q1 e R, respectivamente. A etapa de correção é descrita pelas seguintes equações: − 𝑇 𝑇 −1 (5) 𝑲𝑘+1 = 𝑷− 𝑘+1 𝑪 (𝑪𝑷𝑘+1 𝑪 + 𝑹) − (𝒚 � � � (6) 𝒙𝑘+1 = 𝒙𝑘+1 + 𝑲𝑘+1 𝑘+1 − 𝑪𝒙− 𝑘+1 ) 𝑇 𝑷𝑘+1 = (𝑰 − 𝑲𝑘+1 𝑪)𝑷− 𝑘+1 (𝑰 − 𝑲𝑘+1 𝑪) + (7) +𝑲𝑘+1 𝑹𝑲𝑇𝑘+1 Na etapa de correção, é necessário calcular o ganho de Kalman Kk+1 e atualizar a matriz de covariância dos erros das estimativas, 𝑷𝑘+1 . 3.2 O Filtro de Kalman Estendido 3 O Filtro de Kalman O Filtro de Kalman (FK) é um estimador recursivo de estados em sistemas dinâmicos lineares estocásticos, o qual é projetado de modo que o erro quadrático médio da estimação seja minimizado (Welch & Bishop, 2006; Korba et al., 2003). As equações básicas do FK em tempo discreto são: 𝒙𝑘+1 = 𝑨𝒙𝑘 + 𝑩𝒖𝑘 + 𝒘𝑘 𝒚𝑘 = 𝑪𝒙𝑘 + 𝒗𝑘 (1) (2) em que 𝒙𝑘 ∈ ℝ𝑛 é o vetor de estados; 𝒖𝑘 ∈ ℝ𝑚 é o vetor de entradas; 𝒚𝑘 ∈ ℝ𝑞 é o vetor de saídas; 𝑨 ∈ ℝ𝑛×𝑛 é a matriz de transição de estados; 𝑩 ∈ ℝ𝑛×𝑚 é matriz de entrada; 𝑪 ∈ ℝ𝑞×𝑛 é a matriz de saída; 𝒘𝑘 ∈ ℝ𝑛 e 𝒗𝑘 ∈ ℝ𝑞 são variáveis aleatórias que representam os ruídos de modelo e de medi- O equacionamento apresentado na Subseção 3.1 sobre o FK é válido para situações em que as matrizes A, B e C representam modelos lineares. Casos mais gerais requerem uma abordagem não linear. Uma forma não linear pode ser descrita por: (8) 𝒙𝑘+1 = 𝑓(𝒙𝑘 , 𝒖𝑘 , 𝒘𝑘 ) (9) 𝒚𝑘 = ℎ(𝒙𝑘 , 𝒗𝑘 ) Modificações em (8) e (9) foram introduzidas (Welch & Bishop, 2006), ficando a nova denominação conhecida como filtro de Kalman estendido (FKE). O uso do FKE requer linearizações a cada amostra, de forma que as matrizes do sistema de espaço de estados no FK são substituídas na amostra k pelas linearizações do FKE. Assim, as equações do FKE na etapa de predição para a estimação da amostra (k+1) tem as seguintes equações: �𝑘 , 𝒖𝑘 ) �− 𝒙 𝑘+1 = 𝑓(𝒙 − = 𝑨𝑘 𝑷𝒌 𝑨𝑇𝑘 + 𝑸1 𝑷𝑘+1 E na etapa de correção: (10) (11) − 𝑇 −1 𝑪𝑇𝑘 (𝑪𝑘 𝑷− (12) 𝑲𝑘+1 = 𝑷𝑘+1 𝑘+1 𝑪𝑘 + 𝑅) − − )� �𝑘+1 = 𝒙 �𝑘+1 + 𝑲𝑘+1 �𝒚𝑘+1 − ℎ(𝒙 �𝑘+1 (13) 𝒙 𝑇 𝑷𝑘+1 = (𝑰 − 𝑲𝑘+1 𝑪𝒌 )𝑷− 𝑘+1 (𝑰 − 𝑲𝑘+1 𝑪𝑘 ) + 𝑇 (14) 𝑲𝑘+1 𝑹𝑲𝑘+1 em que agora as matrizes 𝑨𝑘 e 𝑪𝑘 são as Jacobianas �𝑘 ), respectivamente. Estas �𝑘 , 𝒖𝑘 ) e ℎ(𝒙 de 𝑓(𝒙 matrizes precisam ser calculadas a cada amostra k, uma vez que dependem dos valores instantâneos dos estados estimados. 4 Formulação do Problema de Identificação de parâmetros com o FKE Nesta seção introduz-se o problema de identificação de parâmetros formulado como uma aplicação do FKE. A ideia é simular o parâmetro na forma de um estado e admiti-lo invariante em um horizonte de tempo suposto como regime permanente. Ou seja, no tempo contínuo, se 𝒙𝑃 (𝑡) é um vetor de estados representando parâmetros, então em regime permanente 𝒙̇ 𝑃 (𝑡) = 0. Em tempo discreto, esta expressão pode ser aproximada por 𝒙𝑘+1 ≈ 𝒙𝑘 . Evidentemente, a concepção de “regime permanente” é relativa, pois o sistema é dinâmico, está constantemente sujeito a perturbações na forma de ruído ou mesmo distúrbios de outra natureza (Perić & Vanfretti, 2014). Por isso, admite-se que o estado de regime seja alcançado ao final de uma janela finita de dados, definida em função do problema (Ledwich & Palmer, 2000). 4.1 Inserção dos parâmetros na forma de estados O objetivo neste artigo é a identificação de modo dominante de um sistema real no qual não se conhece o seu modelo. Além disso, os sinais utilizados são captados em PMUs e sujeitos a apenas distúrbios do tipo ruído ambiente. Por esta razão, assume-se que a 𝜕𝑓 =0 entrada 𝒖𝑘 seja nula. Ou seja, assume-se que 𝜕𝒖𝑘 em (8). Particularmente, um sistema com um único modo complexo tem equação característica da forma 𝑠 2 + 2𝑎1 𝑠 + 𝑎0 = 0, em que 𝑎0 e 𝑎1 são parâmetros da equação. Uma representação de estado em tempo contínuo de um sistema autônomo, com ruído de modelo w e de medição v, com polos iguais aos valores característicos dessa equação, pode ser apresentada como: −𝑎0 𝑥1 �� � + 𝒘 −𝑎1 𝑥2 𝑥1 𝑦 = [0 1] �𝑥 � + 𝑣 2 0 𝑥̇ � 1� = � 1 𝑥2̇ (15) (16) em que os estados estimados são x1 e x2 e os parâmetros são a0 e a1; além disso, y representa os dados medidos. A matriz de covariância associada ao ruído de modelo é Q1 enquanto a de processo é R. Os parâmetros a0 e a1 também podem ser incluídos como estados do FKE e assim estimados a cada iteração do algoritmo (Korba et al., 2003). Desta forma, o sistema (15)-(16) é não linear tendo duas equações, mas quatro variáveis de estado. As outras duas equações são justamente 𝑎0̇ = 0 e 𝑎1̇ = 0. A transformação de sistema contínuo em sistema discreto é feita aproximando-se as derivadas no 𝑥 −𝑥 tempo entre duas amostras por 𝑥̇ = 𝑘+1 𝑘 , em que h ℎ é o período de amostragem. Consequentemente, tendo o sistema somente dois parâmetros, as equações do FKE são: 𝑥1,𝑘+1 1 −ℎ𝑎0 𝑥1,𝑘 �𝑥 �=� �� � + 𝒘𝑘 (17) ℎ 1 − ℎ𝑎1 𝑥2,𝑘 2,𝑘+1 𝑎0,𝑘 𝑎0,𝑘+1 � = �𝑎 � + 𝒘𝑝 �𝑎 1,𝑘+1 (18) 1,𝑘 em que wp é o ruído de modelagem do processo, mas agora associado aos parâmetros, com média nula e variância do ruído Q2. Já wk é o ruído associado aos estados propriamente estimados, com covariância Q1. Em uma forma compacta, é o equivalente a se ter o sistema aumentado: 𝑥1,𝑘+1 1 𝑥2,𝑘+1 ℎ �=� �𝑎 0,𝑘+1 0 𝑎1,𝑘+1 0 −ℎ𝑎0,𝑘 1 − ℎ𝑎1,𝑘 0 0 0 0 1 0 0 𝑥1,𝑘 0 𝑥2,𝑘 �� �+ 0 𝑎0,𝑘 1 𝑎1,𝑘 𝒘𝒌 �𝒘 � (19) 𝑝 𝑥1,𝑘 𝑥2,𝑘 [𝑦𝑘 ] = [0 1 0 0] �𝑎 � + 𝑣 (20) 0,𝑘 𝑎1,𝑘 A variância do novo modelo de processo é uma matriz bloco diagonal Q, englobando nos blocos diagonais a matriz Q1 e a matriz Q2. 4.2 Aplicação do FKE Observa-se que o sistema obtido a partir da modelagem incluindo os parâmetros é não linear. O algoritmo do FKE, portanto requer uma matriz Jacobiana das derivadas parciais da matriz de estados a cada iteração do algoritmo, definida como: 1 ℎ 𝑨𝑘 = � 0 0 −ℎ𝑎0,𝑘 1 − ℎ𝑎1,𝑘 0 0 −ℎ𝑥2,𝑘 0 1 0 0 −ℎ𝑥2,𝑘 � 0 1 A matriz Ck é linear, sendo, portanto, a própria matriz de saída de (20) e Bk=0. A modelagem na forma (19)-(20) considera que o sistema possui apenas um modo de oscilação, λ=α ±jω. Sabe-se, no entanto, que um sistema elétrico possui milhares de modos de oscilação, mas que apenas alguns deles são dominantes. O intuito da aplicação ao se utilizar o FKE é identificar apenas os polos dominantes observáveis nos sinais amostrados. Mais de um polo pode ser estimado pelo FKE estendendo-se a formulação (15)-(16) para um conjunto de n parâmetros da seguinte forma: 𝑥1̇ 0 −𝑎0 ⎡ 𝑥 ̇ ⎤ ⎡1 −𝑎 2 1 ⎢ ⎥ ⎢ ⋮ ⎢ ⋮ ⎥ = ⎢⋮ ̇ ⎥ ⎢0 0 ⎢𝑥𝑛−1 ⎣ 𝑥𝑛̇ ⎦ ⎣0 0 𝑦 = [0 𝑥1 0 0 ⎤ ⎡ 𝑥 ⎤ 0 0 ⎥ ⎢ ⋮2 ⎥ ⋮ ⋮ ⎥⎢ ⎥ + 𝑩𝑢 0 −𝑎𝑛−2 ⎥ ⎢𝑥𝑛−1 ⎥ 1 −𝑎𝑛−1 ⎦ ⎣ 𝑥𝑛 ⎦ 𝑥1 ⎡ 𝑥2 ⎤ ⎢ ⎥ 1 ⋯ 0 1] ⎢ ⋮ ⎥ ⎢𝑥𝑛−1 ⎥ ⎣ 𝑥𝑛 ⎦ ⋯ ⋯ ⋱ ⋯ ⋯ incluindo mais as n equações diferenciais dos parâmetros. Similarmente, na forma de espaço em tempo discreto, obtém-se um sistema aumentado, tal como a dedução efetuada para as equações (19)-(20). 4.3 Dados Medidos e Pré-processamento Os sinais utilizados no presente trabalho são provenientes dos dados de PMUs instalados em laboratório de diversas universidades brasileiras no âmbito do Projeto MedFasee (Medfasee, 2015). Os dados medidos nessas PMUs são: módulo de tensão e ângulo de fase das três fases, e frequência. Os dados são amostrados a uma taxa de 60 amostras por segundo. Inicialmente, arquivos de dados das PMUs são carregados e convertidos para o formato de outros arquivos que são lidos no Matlab. Nesta etapa, é comum ocorrer perda de informação de dados. A PMU nestas condições duplica a última amostra conhecida para substituir a perda de dado. Portanto, essa amostra replicada comporta-se como um dado corrompido em relação ao que seria o verdadeiro sinal. Com o objetivo de atenuar a perda, faz-se uma interpolação de dados. Neste caso, as amostras corrompidas são substituídas por valores intermediários e inseridos como parte do sinal entre as amostras adjacentes efetivamente medidas. Algumas alternativas de interpolação foram avaliadas, optando-se por utilizar o denominado método Piecewise Cubic Hermite Interpolating Polynomial (PCHIP) (Fritsch & Carlson, 1980), disponível no software Matlab. A última etapa do pré-processamento é a filtragem dos sinais de modo a atenuar oscilações com frequência menor que 0,1 Hz e maiores do que 3 Hz. Esta filtragem é necessária, porque o interesse é identificar oscilações eletromecânicas que, tipicamente, encontram-se na faixa entre 0,2 Hz e 2,5 Hz (Vanfretti et al., 2011; Korba et al., 2003). Foi utilizado para filtragem um filtro Butterworth de 2a ordem. 5 Testes e Resultados Nesta seção descrevem-se resultados da aplicação do FKE, conforme metodologia descrita nas Seções 3 e 4. Os cálculos são embasados na utilização de dados de campo obtidos de algumas PMU do projeto Medfasee (Medfasee, 2015). O objetivo é observar o comportamento do modo de oscilação eletromecânico interárea Norte-Sul do SIN. A análise foi efetuada em uma longa janela de dados em que as perturbações são devidas ao próprio ruído ambiente do sistema elétrico. Com esta finalidade, são calculados (estimados) o amortecimento e a frequência do modo de oscilação mais dominante do SIN. O FKE foi utilizado com as seguintes matrizes de covariância P0=I4p, Q1=0,01I2p, Q2=0,0001I2p, R=1, em que Ik é a matriz identidade de ordem k e p é o número de parâmetros a estimar. Todos os estados x0, incluindo aqueles representativos dos parâmetros utilizados para calcular os modos de oscilação, foram inicializados com valores aleatórios na faixa entre 0 e 1. Apesar da inicialização ser feita desta forma, nenhum problema foi identificado com relação à convergência final de parâmetros. Os dados utilizados neste artigo referem-se a informações de ângulo de tensão coletados no dia 14 de outubro de 2014, no período de 20h00 às 21h00 (janela com 1 hora de dados), hora local de Brasília. Os dados foram obtidos à frequência de 60 amostras/s. Na janela de dados em questão, nenhuma ocorrência em termos de perturbação na rede elétrica, merecedora de destaque, foi registrada nos boletins de divulgação do Operador Nacional do Sistema Elétrico. As informações foram obtidas das PMUs localizadas na UFT, UFRGS, UFSC, UNIPAMPA, UTFPR e UFMA. Embora nos testes tenham sido utilizados dados para simulações com ângulos das três fases da rede trifásica, somente serão mostrados os resultados relativos à fase referenciada como A. Os dados foram interpolados, quando se detectou perda de informação. Antes do uso do FKE, os dados foram filtrados. O FKE foi utilizado de modo a permitir a estimação dos parâmetros que caracterizam os polos complexos. Com base nestes parâmetros, obtêm-se os valores instantâneos de amortecimento e de frequência que caracterizam os modos. Os parâmetros modais são estimados a cada amostra. No entanto, com a finalidade de monitoramento, calculam-se os seus valores médios considerando-se janelas móveis de duração 600 s (10 min). Estes valores médios têm avaliações espaçadas no tempo a cada 10 s, iniciando-se no instante 600 s, o seguinte em 610 s, e assim sucessivamente, até completar a varredura de dados no tempo, que ocorre no instante 3.600 s (1 hora de dados). A Tabela 1 ilustra faixas típicas de valores associados a modos de oscilação entre áreas no sistema interligado brasileiro (Jeremias et al., 2012). O interesse é por valores na faixa relativa à primeira linha da tabela, portanto, entre 0,20 Hz e 0,40 Hz. Tabela 1. Faixas de valores de frequência de modos de oscilação interárea conhecidos do SIN. Modo Faixa de frequência (Hz) Norte-Sul Sul-Sudeste Norte-Nordeste Mato Grosso-SIN Rio de Janeiro-SIN São Paulo -SIN 0,20 – 0,40 0,60 – 0,80 0,55 – 0,65 0,40 – 0,45 1,10 – 1,30 0,65 – 0,75 A observação do amortecimento e da frequência do modo Norte-Sul foi realizada considerando-se os sinais de diferença angular (ângulos relativos). Fixou-se como referência o ângulo medido na PMU da UFT (região Norte do Brasil). Para cada um dos sinais de diferença angular obtidos, o FKE foi aplicado utilizando-se modelos com quatro e seis parâmetros. Foram estimados os polos e determinados os espectros de frequência de cada sinal para essas duas situações de modelo. A Figura 1 apresenta espectros de frequências do sinal de diferença angular relativos aos dados obtidos na PMU da UNIPAMPA. O cálculo do espectro foi realizado através da Transformada Rápida de Fourier (Fast Fourier Transform - FFT). São indicadas também nestes gráficos as frequência dos polos complexos estimados via FKE com quatro parâmetros (figura superior) e seis parâmetros (figura inferior). Os valores de frequência dos polos estimados na Figura 1 foram calculados com os parâmetros médios estimados na última janela móvel do sinal. Ambos modelos encontraram polos complexos dominantes com frequência na faixa entre 0,20 e 0,40 Hz. Os outros polos estimados apresentam menor dominância, quando comparados ao modo Norte-Sul. Figura 1. Espectro de frequências da defasagem angular de tensão entre as PMUs instaladas na UFT e UNIPAMPA (azul) e as frequências dos polos complexos estimados a partir do FKE (vermelho) utilizando modelos com dois (parte superior) e três polos (parte inferior), respectivamente. Na análise que se segue, considera-se apenas o modelo de FKE com seis parâmetros. As Figuras 2 e 3 apresentam os valores de frequência e amortecimento dos modos identificados na faixa de frequências do modo Norte-Sul ao se usar os ângulos relativos das PMUs da UFRGS, UFSC, UNIPAMPA e UTFPR. Os demais modos encontrados pelo FKE em cada sinal referem-se a polos com frequências fora da faixa de frequências de interesse, entre 0,20 e 0,40 Hz, e que não são analisados neste estudo. Figura 2. Frequência dos modos de oscilação Norte-Sul com dados das PMUs instaladas na UFRGS, UFSC, UNIPAMPA e UTFPR, e referência angular na PMU da UFT O comportamento da frequência e do amortecimento dos modos encontrados na faixa de frequência de interesse em todos os sinais analisados é o mesmo, com frequência variando entre 0,33 Hz e 0,37 Hz e amortecimento variando entre 6% e 10,5%. Nos gráficos das Figuras 2 e 3, verifica-se variação acentuada nos valores de amortecimento e de frequência estimados, ao se avaliar sinais de PMU da UFRGS, entre 2.500 e 3.500 segundos. Isto ocorreu porque nesse intervalo houve perda de 2.844 amostras nos dados provenientes daquela PMU, o equivalente a 47,4 segundos de sinal. Embora tenha sido realizada interpolação de dados, constatou-se que este procedimento mostrou-se ineficiente e insuficiente para a estimação adequada dos estados, e por consequência, dos parâmetros de interesse. Por outro lado, as pequenas flutuações nos outros intervalos de tempo da observação, bem como nas curvas das demais PMUs são justificadas em função da variação considerando-se o longo tempo da observação dos parâmetros. A Tabela 2 traduz numericamente uma síntese com os valores médios de frequência e amortecimento identificados na faixa de frequências do modo Norte-Sul. Os valores foram calculados considerando-se a última janela móvel de cada sinal. Os valores apresentados nessa tabela confirmam as tendências já verificadas nos gráficos das Figuras 2 e 3, ratificando, portanto, a caracterização do modo Norte-Sul do SIN. on Numerical Analysis, Vol. 17, No. 2, pp.238–246. Jeremias, T., Zimmer, V., Decker, I. C., Silva, A. S. E. & Agostini, M. N., (2012). Estudo de Oscilações Eletromecânicas no Sistema Elétrico Brasileiro Utilizando Medidas Fasoriais Sincronizadas. Anais do XIX Congresso Brasileiro de Automática, pp.2364– 2371. Figura 3. Amortecimento dos modos de oscilação Norte-Sul com dados das PMUs instaladas na UFRGS, UFSC, UNIPAMPA e UTFPR, e referência angular na PMU da UFT Tabela 2. Parâmetros estimados relativos ao modo de oscilação Norte-Sul, a partir de diferentes PMUs PMU Frequência (Hz) Amortecimento (%) UFRGS UFSC UNIPAMPA UTFPR 0,3503 0,3491 0,3503 0,3683 7,80 7,59 7,70 9,24 5 Conclusão Este artigo propôs uma metodologia para estimação do modo dominante de um sistema elétrico, cujo embasamento matemático foi baseado no filtro de Kalman estendido. Foi demonstrado através de experimentos, com dados de PMUs, que o filtro estima os parâmetros mesmo para dados com ruído ambiente. A aplicação utilizou dados de PMUs instalados em laboratórios de algumas universidades brasileiras e permitiu identificar frequência e amortecimento relacionados ao modo de oscilação dominante Norte-Sul do sistema interligado brasileiro. A identificação ocorre para a faixa entre 0,20 Hz e 0,40 Hz, característica desse modo. Evidentemente, como o processo de identificação considera apenas um sinal yk (q=1) na identificação do processo, são verificadas diferenças nos diversos valores que cada PMU estima, em termos de frequência e amortecimento, de acordo com a Tabela 2. Em trabalhos futuros, os autores investigarão o cálculo de um único modo dominante, mas utilizando simultaneamente vários sinais medidos (q>1). Korba, P., Larsson, M. & Rehtanz, C., (2003). Detection of oscillations in power systems using Kalman filtering techniques. IEEE Conference on Control Applications, pp.183– 188. Ledwich, G. & Palmer, E., (2000). Modal estimates from normal operation of power systems. IEEE Power Engineering Society Winter Meeting, Vol. 2, , pp.1527 – 1531. Medfasee, (2015). Projeto Medfasee, disponível em: http://www.medfasee.ufsc.br/temporeal/. Perić, V. S. & Vanfretti, L., (2014). Power-System Ambient-Mode Estimation Considering Spectral Load Properties. IEEE Transactions on Power Systems, Vol. 29, No. 3, pp.1133– 1143. Prioste, F. B., Silva, A. S. & Decker, I. C., (2010). Avaliação de Métodos de Identificação de Modos Eletromecânicos em Sistemas Elétricos de Potência. In XVIII Congresso Brasileiro de Automática. pp. 3391–3398. Vanfretti, L., Dosiek, L., Pierre, J. W., Trudnowski, D. J., Chow, J. H., García-Valle, R. & Aliyu, U., (2011). Application of ambient analysis techniques for the estimation of electromechanical oscillations from measured PMU data in four different power systems. European Transactions on Electrical Power, Vol. 21, , pp.1640–1656. Welch, G. & Bishop, G., (2006). An Introduction to the Kalman Filter. University of North Carolina at Chapel Hill Department of Computer Science, pp.1–16. Referências Bibliográficas Decker, I. C., Dotta, D., Agostini, M. N., Zimath, S. L. & Silva, A. S., (2006). Performance of a synchronized phasor measurements system in the Brazilian power system. IEEE Power Engineering Society General Meeting, pp.1–8. Fritsch, F. N. & Carlson, R. E., (1980). Monotone piecewise cubic interpolation. SIAM Journal Yang, L., Jiao, Z., Kang, X., Song, G. & Suonan, J., (2015). Fast algorithm for estimating power frequency phasors under power system transients. IET Generation, Transmission & Distribution, Vol. 9, No. 4, pp.395–403.
Baixar