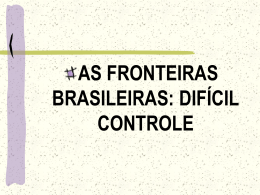
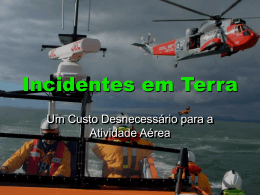
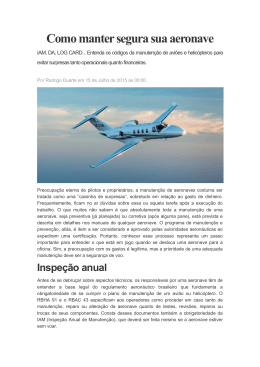
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA AERONÁUTICA E MECÂNICA “Guia Básica para Projetar e Desenvolver um Piloto Automático para VANTS” Disciplina EA-291 Elaborado por: Eng. Acacio Alejandro Morales Henriquez Eng. Erik Osvaldo Pozo Irusta Outubro, 2010 GUIA BÁSICA PARA PROJETAR E DESENVOLVER UM PILOTO AUTOMATICOPARA VANTS O seguinte trabalho apresenta de uma guia inicial para desenvolver e projetar um piloto automático para VANTs (Veiculo Aéreo Não Tripulado), a informação aqui mostrada parte do estudo de alguns pilotos acadêmicos desenvolvidos por alunos e grupos de pesquisa em diferentes universidades a nível mundial, com a finalidade de estabelecer alguns fundamentos para que alunos, de graduação ou pós-graduação, possam iniciar o desenvolvimento de um VANT e mais especificamente de um piloto automático. Apresenta-se uma arquitetura geral dos sistemas que deveriam ser integrados na aeronave e se mostram os dispositivos básicos e seu funcionamento, aliás, algumas considerações que devem ser consideradas. APLICAÇÕES DOS VANTS Um VANT também conhecido como UAV (Unmanned Aerial Vehicle) é uma aeronave sem tripulação humana a bordo. Muitas definições estabelecem a aeronave deverá ter um sistema de controle autônomo ou piloto automático para ser considerados como VANTs. Estes tipos de aeronaves estão sendo atualmente muitos usados em diferentes aplicações tanto militar quanto civil, devido a sua principal vantagem: não existe o risco de perdidas humanas. Assim este tipo de aeronaves são utilizadas a nível militar para executar missões de combate, simulação de alvos aéreos, reconhecimento de zonas remotas, monitoramento de campos de batalha e condições ambientais, e aplicações logísticas tais como envio urgente de recursos. No campo civil os VANTs estão destinados a substituir a tripulações humanas em tarefas perigosas tais como: salvamento e resgate, fumigação, estudos ambientais e geológicos, além de ser parte de pesquisas e de desenvolvimento de novas tecnologias. MODELO MATEMATICO As equações de movimento da aeronave como corpo rígido, são expressas em espaço de estado da seguinte forma: é o vetor de estado, este está formado por um conjunto de variáveis X e U, onde X são as variáveis do vetor de estado e U são as variáveis de entrada de controle. Este vetor esta dividido em quatro sub-vetores que representam as velocidades rotacionais, as velocidades translacionais, a atitude e por ultimo a posição. Assim as variáveis de estado são: O sub-vetor de velocidades rotacionais está composto pelas variáveis P, Q e R as quais são as velocidades angulares entorno ao eixo x, y, e z respectivamente. O sub-vetor de velocidades translacionais está composto pelas variáveis e W as quais são as componentes das velocidades lineares entorno ao eixo x, y e z respectivamente. Estas velocidades podem se transformar em sendo a velocidade linear resultante, e a partir de algumas equações, assim o angulo de ataque da aeronave e o angulo de derrapagem. O sub-vetor de atitude esta composto pelas variáveis e que representam os angulos de atitude nos eixos x, y e z respectivamente. Por ultimo o sub-vetor de posição esta composto pelos vetores de posição nos três eixos, e (No eixo z o ). As variáveis de controle do modelo da aeronave convencional são: Onde é manete (Throttle), do aileron (Aileron) e deslocamento do profundor (Elevator), deslocamento deslocamento do leme de direção (Rudder). Na maioria das analises usando o modelo da aeronave, a dinâmica é separada em dinâmica longitudinal e dinâmica latero-direcional . ESQUEMA DE FUNCIONAMENTO Para que um VANT possa ser tenha a capacidade do vôo autônomo, é necessário que contenha os blocos de navegação, guiamento e pilotagem. O seguinte diagrama (figura 1) mostra um esquema de funcionamento destes blocos. Figure 1 Esquema de guiamento, controle e navegação A entrada do sistema é a trajetória, inserida pelo operador usando Waypoints. Os Waypoints são jogos das coordenadas que identificam um ponto no espaço físico. Para as finalidades de aérea estas coordenadas incluem geralmente longitude e latitude, e altura, estes pontos são usados para definir trajetos invisíveis do roteamento para a navegação. Esta entrada irá para o bloco de guiamento, o bloco de guiamento irá comparar a posição atual da aeronave com a situação desejada e gerará os comandos que entrarão ao bloco de controle com a finalidade de alcançar os pontos desejados. No bloco de controle (Bloco de pilotagem) se processará a informação dos comandos que chegam do bloco de guiamento para transformá-los em atuação, neste bloco são programadas e implementadas as leis de controle e os valores dos controladores que são estabelecidos no projeto. Este bloco recebe informação dos sensores para ter referencia das variáveis a ser controladas. A atuação gerada como resultado será executada pela aeronave, o sistema principal, sabendo que recebe perturbações do exterior tais como forcas e momentos exteriores. Os sensores tomaram todos os dados das variáveis da aeronave e os enviarão tanto para o bloco de controle quanto para o bloco de navegação, este ultimo processará a informação dos sensores para gerar os dados de posição, velocidade e aceleração da aeronave. Os dados de posição, velocidade e aceleração realimentaram o sistema, entrando no bloco de guiamento. ARQUITETURA DO SISTEMA A arquitetura geral de um VANT com capacidade de vôo autônomo é mostrada na figura 2. Os principais sub-sistemas são: os dispositivos abordo, a estação terrestre e todos aqueles dispositivos que permitem a interligação entre eles. Figura 2 Arquitetura Básica de um PA para VANTs A comunicação entre dispositivos é realizada via radio freqüências na banda ISM, sendo esta a mesma banda do WLAN (Wireless) e WPAN (Bluetooth). O uso destes equipamentos requer tomar algumas considerações de segurança muito importantes que devem ser estudadas com cuidado. O núcleo principal a bordo da aeronave pode ser o microcontrolador o um computador de vôo. Este dispositivo será responsável de adquirir e processar toda a informação da aeronave, aliás, deverá manter um enlace com a estação terrestre e executar o software de controle. Os outros componentes que deverá ter a bordo a aeronave são: os sensores, os atuadores, e qualquer outro dispositivo necessário segundo a missão para a qual foi projetada a aeronave. Os sensores a bordo são: os girômetros, acelerômetros e magnetômetros, nos três eixos da aeronave, um sensor GPS, um sensor de medição das RPM do motor (Se fosse necessário, isto dependerá do tipo de motor que seja usado), os sensores de pressão diferencial e absoluta, o sensor de voltagem da bateria, o sensor de temperatura e um ultimo sensor para medir o nível de combustível. Os atuadores ou servomecanismos pelo geral são motores elétricos cuja função é acionar as superfícies de comando, estes são projetados para ter um comportamento linear que deverá ser calibrado, normalmente uma aeronave tem como mínimo quatro atuadores que podem ser servomotores, um para cada controle da aeronave: manete, profundor, leme de direção e ailerons. Em terra deverá ter uma estação de controle, esta estação geralmente esta composta de um computador, um modem de transmissão de dados e um radiocontrole para efetuar o controle manual de ser necessário. PILOTO AUTOMATICO O piloto automático é aquele conjunto de dispositivos que permitem pilotar a aeronave sem ajuda do humano. Existem vários pilotos automáticos comercialmente disponíveis, as maiorias desses dispositivos fornecem pouco aceso as estruturas internas de controle, mas estes são muito apropriados para executar tarefas de controle de alto nível. Estes pilotos automáticos têm como núcleo principal a bordo um Sistema de controle e guiamento do vôo (Flight Management and Control System). Este sistema pode estar composto por vários computadores funcionando como um sistema quase operacional ou pode ser um processador de tipo PC-104 (Este modo é o mais usado atualmente) funcionando em QNX neutrino e com isto passa ser um sistema operativo em tempo real. Todo isto da maior robustez e confiabilidade ao sistema para executar funções tais como: Controlar a comunicação entre o hardware, sensores e demais periféricos. Fornecer dados conectados como: posição, atitude, deflexão das superfícies de controle em tempo real para e desde os dispositivos. Determinar a bordo o vetor de estado (Três componentes de posição e três componentes de Velocidade) desde dados fornecidos pelos sensores conectados. Realizar os cálculos de controle do vôo para determinar a atuação com a finalidade de atingir os objetivos (waypoint). Planificação e guiamento da missão desde waypoint dinâmicos. Verificação e monitoramento do estado dos dispositivos a bordo. Este tipo de sistema pode interatuar com um DMU (Dynamic Measuring Unit) o qual mede todas as velocidades e acelerações angulares, temperatura e vibração, com um receptor GPS (usado para determinar a posição da aeronave), e com um transponder A/C (que fornece a medição de altitude da aeronave). Figura 3 Arquitetura do piloto automático com FMCC Porém quando o objetivo do VANTs tem finalidades educativas e de entendimento é conveniente usar um microcontrolador que fornece uma maior flexibilidade para implementar e desenvolver leis de controle aumentando a experiência educativa dos estudantes envolvidos no projeto. Estes tipos de pilotos automáticos estão constituídos por uma serie de componentes a bordo da aeronave tais como: microcontrolador, sensores, circuito de sinais, dispositivos de aquisição de dados e o modem de comunicação a bordo, que podem ser acoplados em uma placa. A seguir, será mostrada uma breve descrição de cada um destes dispositivos: 1. Microcontrolador: é o responsável de integrar todos os componentes a bordo da aeronave e de enviar e receber os dados da aeronave através do modem. Alem disso pode ser carregado com algoritmos matemáticos que permitam processar a informação recebida dos sensores. Também podem ser implementadas leis de controle com a finalidade de fazer a navegação, guiamento e controle da aeronave, com isto a aeronave tem capacidade de executar vôos autônomos programados pela estação de terrestre, inserindo pontos de trajetória conhecidos como “waypoint” e estabelecendo parâmetros fixos como altura. 2. Painel de Sensores: os sensores podem ser organizados em um painel de sensores que para que estejam inter-relacionados com o painel do microprocessador e os dispositivos eletrônicos associados, formando o painel ou placa principal do sistema. O painel de sensores deverá estar composto por três chips separados, um para cada eixo, de girômetros, acelerômetros e magnetômetros, dois chips para os sensores de pressão e um chip para o receptor do GPS, todos integrados no modulo do microcontrolador. Este painel também deverá incluir uma fonte de alimentação para todos os componentes eletrônicos. 3. Sensores Inerciais: para medir as velocidades angulares da aeronave são usados os girômetros estes sensores são direcionais, ou seja, fornecem a grandeza medida numa determinada direção. Para atender a movimentos em várias direções, utilizam-se outros conjuntos compostos por várias unidades de um mesmo sensor, inclusive por questões de redundância Alguns dos mais usado são o ADXRS150 e o MLX90609. A medição da aceleração lineal poderá ser feita através de três acelerômetros analógicos. Os acelerômetros são sensores inerciais utilizados em sistemas de navegação inercial para determinar as acelerações de um veículo. Os acelerômetros podem ser realizados com tecnologia totalmente eletromecânica, de estado sólido, ou opto-mecânica. Um acelerômetro comumente usado em Vants é o dual-axis chip ADXL202 Para obter a orientação absoluta em relação ao campo magnético da terra são usados os magnetômetros, especificamente três módulos, este um instrumento usado para medir a intensidade, direção e sentido de campos magnéticos em sua proximidade. Na aeronave os magnetômetros são uma versão moderna de um a bussola tradicional, pois conseguem medir com certa precisão o campo magnético do planeta Terra. Os mais recomendados a nível comercial são os fabricados pela Honeywell Solid State Electronics Center (SSEC). Usando as medições destes sensores é possível calcular a atitude, posição e orientação da aeronave nos três eixos, através da implementação de um algoritmo no microcontrolador para tal fim (Bloco de Navegação). 4. Sensores das superfícies de controle: como foi dito anteriormente as superfícies de controle agem com a ajuda de uma series de motores elétricos denominados servos. Para obter informação de entrada dos comandos é necessário ter um conhecimento bastante preciso dos ângulos de deflexão de todas as superfícies aerodinâmicas (profundor, leme e aileron) assim como do manete do motor. Estes dados são obtidos a partir da medição das voltagens nos potenciômetros dentro dos servomotores DC. 5. Outros Sensores: dentro dos equipamentos a bordo da aeronave é necessário um sensor de pressão diferencial e um sensor de pressão dinâmica, este ultimo é um tubo pitot que geralmente está colocado na asa da aeronave, essas medidas permitem calcular a velocidade da aeronave. Com a medição de pressão diferencial entre o nível da terra e o nível da aeronave, é calculada a altitude da aeronave. Alguns sensores de pressão diferencial recomendados são o MPXV5004D e o MPXAZ4115. A tração do motor pode ser calculada conhecendo as RPM do motor, por causa disso é recomendável também colocar um sensor de RPM do motor. Estes sensores geralmente são dois pequenos imãs colocados na placa traseira do spinner e empregando um sensor colocado na cobertura do motor são gerados pulsos elétricos toda vez que o imã passa na frente do sensor. Medindo o intervalo de tempo entre cada pulso o microcontrolador pode calcular as RPM do motor. 6. Modem de Comunicação: toda aeronave não tripulada deve ter uma grande segurança na hora de transmitir e receber informação, é recomendável ter mínimo dois links de comunicação remota (Em alguns casos se utiliza um terceiro link para enviar informação de algum outro dispositivo adicional, por exemplo, enviar vídeo de uma câmera instalada) e estes devem permanecer separados. O primeiro link se utiliza como canal de comunicação do radio controle e a aeronave. O segundo link deverá ser usado para trocar os dados principais entre a aeronave e a estação terrestre. Um modem comumente usado é o Spectra 910 que opera na frequência dos 900MHz e tem um alcance de 40 km aproximadamente. Recomenda-se usar porto serial para a conexão com o microcontrolador. 7. Controle dos Servomotores: O microcontrolador deverá ter no mínimo quatro saídas independentes para gerar as referencias de comando para os servomotores (Para controlar o servo do manete do motor, servo do leme de direção, servo do profundor e uma ultima para controlar o servo dos ailerons). 8. Receptor GPS: este sensor proporciona os dados de posição que podem ser usados diretamente para o guiamento da aeronave ou para corrigir os dados obtidos a partir dos sensores inerciais. 9. Receptor (RX, receiver): é a peça que recebe os comandos do Transmissor (pelas ondas de rádio) e passa a informação para o canal determinado. Um canal é uma via por onde o transmissor envia uma informação à alguma parte eletrônica da aeronave, como servos e ESC. Para cada servo (desde que não estejam ligados em paralelo) e para o ESC, é necessário um canal disponível. Por exemplo, para aeromodelismo elétrico, existem os micros receptores que pesam algumas poucas gramas, mas normalmente é usado um receptor de aeromodelos a combustão, como o R127 da Futaba. Figura 4 Hardware de um Piloto Automático com microcontrolador ESTAÇÃO TERRESTRE A estação terrestre esta composta principalmente por um computador (Personal Computer), que normalmente é um notebook, equipado com um modem de comunicação wireless. O sistema operacional pode ser windows ou linux, dentro do qual deverá ser criada ou customizada uma interface gráfica (Graphical User Interface) onde seja possível ser visualizada toda a informação recebida da aeronave em tempo real, como por exemplo altitude, velocidade, atitude, posição etc. Também como parte da estação de terra deverá existir um sistema alterno de controle manual, feito através de um radiocontrole (Futaba é o tipo mais usado). Com este sistema o operador poderá assumir o controle da aeronave para executar um guiamento remoto manual enviado diretamente a um receptor alterno a bordo da aeronave. Este guiamento remoto da aeronave deverá estar disponível em todas as fases do vôo (ex: Taxi, decolagem, emergência e pouso). O microcontrolador não deverá receber este guiamento manual porque esta informação não precisa ser processada. A estação terrestre deverá ter ainda a capacidade de coordenar o vôo autônomo da aeronave, fornecendo comandos do controle e de navegação de alto nível via way-points. Estes way-points são pontos marcados no mapa de navegação da aeronave, os quais são a referencia para traçar a trajetória da aeronave. O sistema de controle da aeronave deverá executar o guiamento e o controle para a aeronave atingir estes way-points na ordem predeterminada pelo operador. CONSIDERAÇOES FINAIS: No caso de que não esteja selecionada ou projetada a aeronave para fazer a implementação do piloto automático é importante ter claro as principais características que deverá ter são: uma grande capacidade de carga e uma boa estabilidade, além dos custos. Algumas aeronaves recomendadas são: Goldberg Declathlon ARF e 1/3-scale model of a Piper Cub. Por ultimo uma recomendação importante feita pela maioria dos grupos de pesquisa de VANTs é usar comunicação entre dispositivos via RS-212 serial porque a maioria dos dispositivos que se são usados tem essa capacidade de interface reduzindo custos e tempo em desenvolvimento de interfaces, aliás, os portos de comunicação serial oferecem soluções simples entre hardware e software. Por ultimo é recomendável consultar nos livros de dinâmica (mostrados nas referencias) de vôo sobre o modelo matemático da aeronave para obter as equações dinâmicas, as funções de transferência e toda a informação relacionada com este tema, assim como para ter um maior entendimento da física e as variáveis que atuam na dinâmica da aeronave. REFERÊNCIAS: Brian L. Stevens and Frank L. Lewis, Aircraft Control and Simulation, Editorial John Wiley and Sons, New York, USA, Febrero de 1992. R. Clothier, A. Harrinson, D. Dusha, I. McManus, D. Greer, R. Walker, “Developed of a low-cost UAV System for Civilian Airspace Integration Trials”, Queensland University of Technology, Brisbane, Australia 2005. D. Jung, E. J. Levy, D. Zhou, R. Fink, J. Moshe, A. Earl, P. Tsiotras, “Design and Developement of a Low-Cost Test-Bed for Undergraduate Education in UAVs”, Atlanta, USA, 2006. Lyle N. Long, Scott D. Hanford, Albert F. Niessner, George B. Gurney, “An Undergraduate course in Unmanned Air Vehicles”. Robert C. Nelson, Flight Stability and Automatic Control, Mac-Graw Hill Company, Segunda edición, 1998. QNX software System Ltd, http://www.qnx.com. Sobre Aeromodelismo: ◦ http://www.e-voo.com. ◦ http://www.aeromodelismovirtual.com Para comprar: ◦ http://microcontrollershop.com
Baixar