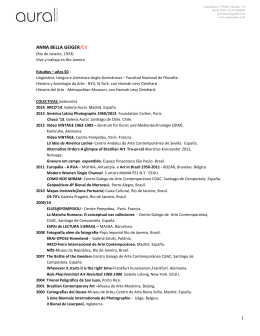
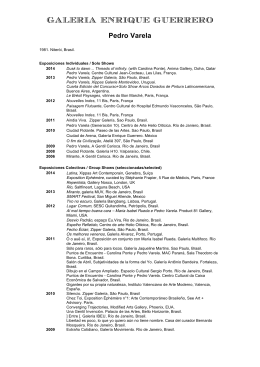
UNIVERSIDAD FEDERAL DE RIO DE JANEIRO COPPE PROGRAMA DE INGENIERIA ELECTRICA CURSO DE EXTENSION ESTABILIDAD ELECTROMECANICA DE POTENCIA DE SISTEMAS Prof. Glauco Nery Taranto (Ph.D.) Rio de Janeiro, RJ Noviembre del 2003 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 IDENTIFICACION NOMBRE: _______________________________________________________________ DIVISION: ___________ RAMA: ____________ DIRECCION: _______________________________________________________________ CEP: ___________ CIUDAD: ÁREAS DE INTERES: _______________________ ESTADO: _________ ___________________________________________________ ___________________________________________________________________________ DESCRIBA BREVEMENTE SU AREA DE TRABAJO ___________________________________________________________________________ ___________________________________________________________________________ ___________________________________________________________________________ ___________________________________________________________________________ ___________________________________________________________________________ ___________________________________________________________________________ AÑO DE GRADUACION: Post-Grado ______ INSTITUCION: _____________________ AÑO DE INICIO _____ AÑO DE FINALIZACIÓN _____ INSTITUCION: ___________________________________ CURSO: _________________________________________ TÍTULO DE DISERTACIÓN: ___________________________ ___________________________________________________________________________ Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 EVALUACION PRE-MODULO ESTABILIDAD ELETROMECANICA DE SISTEMAS DE POTENCIA 1. ¿Qué es un sistema Dinámico? 2. ¿Cuáles son los objetivos de un Estudio de Estabilidad Transitoria? 3. ¿Cuáles son los fenómenos transitorios electromecánicos usualmente analizados en un sistema de potencia? 4. ¿Cuáles son los sistemas de control usuales de un sistema de potencia? 5. ¿Cuál es el principio del fenómeno de auto-excitación de un generador síncrono? Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 EVALUACION POST - MODULO ESTABILIDAD ELETROMECANICA DE SISTEMAS DE POTENCIA 1. Qué es Estabilidad transitoria? 2. Cuáles son los sistemas que más influencias en la estabilidad transitoria? 3. Cuáles son las funciones y objetivos de un sistemas de excitación? 4. Cuál es la principal conclusión que se saca del criterio de áreas? 5. Cuál es el fenómeno físico que ocurre en el humedecimiento de las oscilaciones dadas por el estabilizador de potencia? Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 EVALAUCION DEL MODULO ESTABILIDAD ELECTROMECANICA DE SISTEMAS DE POTENCIA 1 2 3 4 5 MATERIAL DIDÁCTICO INSTRUCTOR(ES) ASUNTO AUTO-AVALUACION 1 – insuficiente 2 – malo Contenido Técnico División de los asuntos Calidad gráfica Didáctica Conocimiento técnico Interés práctico Carga horaria Actualidad Interés por el asunto Aprendizaje durante el curso 3 – regular 4 – bueno 5 – excelente COMENTARIOS ADICIONALES: Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 RESUMEN El curso “Estabilidad Electromecánica de Sistemas de Potencia,” dado en Lima, Perú, preparado para una duración de 20 horas, abordando principalmente los siguientes tópicos: Principios básicos del fenómeno de estabilidad de sistemas de potencia; Estabilidad transitoria o angular (frente a grandes perturbaciones); Estabilidad de régimen permanente (frente a pequeñas perturbaciones); Conceptos básicos de la estabilidad de tensión; Algunos conceptos básicos de fundamentales sistemas de control utilizados en los sistemas de potencia, como por ejemplo la regulación de tensión, de frecuencia, etc. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 AGRADECIMENTOS Al Prof. Leonardo T. G. Lima, responsable por gran parte del material didáctico de ese curso, y con quien di el curso semejante en Furnias Centrales Eléctricas. A mis alumnos de graduación, maestría y doctorado, que a lo largo de los últimos ocho años han sido la muestra de la fuerza que estimula mi carrera académica. A Programa de Ingeniería Eléctrica de la COPPE/UFRJ por el incentivo. Al Centro de Investigación de Energía Eléctrica (CEPEL), en particular a los investigadores Nelson Martins, Sérgio Gomes e Júlio Cézar Ferraz, y a REIVAX, por las informaciones prestadas y por la sociedad en esta empresa en el Perú. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 7 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 SUMÁRIO I. SISTEMAS DINAMICOS .............................................. Error! Bookmark not defined. II. INTRODUCCION A ESTABILIDAD DE SISTEMAS DE POTENCIA ................... II-1 II.1. Conceptos Básicos y Definiciones ......................................................................... II-1 II.2. Clasificación de Estabilidad de Sistemas de Potencia .......................................... II-3 III. ESTABILIDAD TRANSITORIA ................................................................................ III-1 III.1 Una Visión Elemental de Estabilidad Transitoria ................................................ III-1 III.2 Respuesta a un paso de Potencia Mecánica .......................................................... III-2 III.3 Criterio de áreas Iguales ........................................................................................ III-3 III.4 Respuesta a un corto circuito ................................................................................ III-4 III.5 Factores que influyen en la estabilidad transitoria ................................................ III-7 IV. MODELOS DE MÁQUINAS .....................................................................................IV-1 IV.1 Circuitos Acoplados Magnéticamente ..................................................................IV-1 IV.2 Conversión Electromecánica de Energía .............................................................IV-4 IV.3 Enrolamiento de la Máquina CA y Fuerza Magnetomotriz ................................IV-7 IV.4 Máquina Síncrona ...............................................................................................IV-11 IV.4.1. Circuitos Equivalentes ........................................................................... IV-15 IV.4.2. Parámetros de la Máquina Síncrona ...................................................... IV-16 IV.4.3. Modelo de la Máquina Síncrona para Estudios de Estabilidad ............. IV-18 IV.5 Modelo Alternativo para a Máquina Síncrona ....................................................IV-18 IV.6 Ecuaciones Mecánicas ........................................................................................IV-21 V. MODELOS DE REGULADORES DE TENSION ...................................................... V-1 VI. ACOPLAMIENTO DE MODELOS............................................................................VI-1 VI.1 Estructura de Modelos Completos de Sistemas de Potencia para Análisis de Estabilidad Transitoria .....................................................................................VI-1 VI.2 Representación de la Máquina Síncrona y de su Sistema de Excitación ...........VI-2 VI.3 Representación de Sistemas de Transmisión y de Cargas ....................................VI-2 VI.4 Ecuaciones Completas de Sistema ........................................................................VI-3 VII. SIMULACION DE SISTEMAS ................................................................................ VII-1 VII.1 Integración Numérica .......................................................................................... VII-2 VII.1.1. Presición ....................................................... Error! Bookmark not defined. VII.1.2. Estabilidad ............................................................................................... VII-3 VII.1.3. Rigidez .................................................................................................... VII-3 VII.2 Métodos de Integración Numérica ...................................................................... VII-4 Curso LIMA, PERÚ – 2003 8 Estabilidade Eletromecânica de Sistemas de Potência UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 VII.2.1. Método de Euler ...................................................................................... VII-4 VII.2.2. Método de Euler Reverso ........................................................................ VII-6 VII.2.3. Método de Euler Modificado .................................................................. VII-6 VII.2.4. Método Trapezoidal ................................................................................ VII-7 VII.2.5. Método de Runge-Kutta .......................................................................... VII-9 VIII. NOCIONES DE CONTROL .................................................................................... VIII-1 VIII.1 Malla Abierta y Malla cerrada ........................................................................... VIII-1 VIII.1.1. Sistema de Malla abierta ........................................................................ VIII-1 VIII.1.2. Sistema de Malla cerrada ....................................................................... VIII-1 VIII.2 ¿Cuáles son los efectos de la realimentación? ................................................... VIII-1 VIII.2.1. Cambio en Ganancia del Sistema ........................................................... VIII-1 VIII.2.2. Efectos sobre la Estabilidad ................................................................... VIII-2 VIII.2.3. Rechazo de Ruidos y Perturbaciones ..................................................... VIII-2 VIII.2.4. Sensibilidad en Variaciones en los Parámetros ..................................... VIII-2 VIII.3 Clasificación de Sistemas Físicos ...................................................................... VIII-2 VIII.3.1. Sistemas continuos y sistemas discretos ................................................ VIII-2 VIII.3.2. Número de entradas y de salidas ............................................................ VIII-2 VIII.3.3. Sistemas determinísticos y sistemas estocásticos .................................. VIII-2 VIII.3.4. Sistemas instantáneos y sistemas dinámicos .......................................... VIII-2 VIII.3.5. Sistemas causales y sistemas no-causales ............................................. VIII-3 VIII.3.6. Sistemas relajados y sistemas no-relajados ............................................ VIII-3 VIII.3.7. Sistemas invariantes en tiempo y sistemas variantes en tiempo ............ VIII-3 VIII.3.8. Sistemas lineales y sistemas no-lineales ................................................ VIII-4 VIII.3.9. Sistemas de parámetros concentrados y distribuidos ............................. VIII-4 VIII.4 Control en Sistemas de Energía Eléctrica .......................................................... VIII-4 VIII.4.1. Regulación de Tensión ........................................................................... VIII-4 VIII.4.2. Amortiguamiento de Oscilaciones Electromecánicas ............................ VIII-4 VIII.4.3. Control de Carga-Frecuencia ................................................................ VIII-5 VIII.4.3.1. Introducción ....................................................................................... VIII-5 VIII.4.3.2. Conceptos Básicos ............................................................................. VIII-5 VIII.4.3.3. Regulación Primaria .......................................................................... VIII-6 VIII.4.3.4. Regulador Asíncrono ......................................................................... VIII-7 VIII.4.3.5. Regulador con caída de Velocidad .................................................... VIII-8 VIII.4.3.6. Regulación Secundaria .................................................................... VIII-11 VIII.4.4. Resonancia Sub-Síncrona..................................................................... VIII-13 Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 9 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 VIII.4.5. Modulación de Sistemas CCAT ........................................................... VIII-14 VIII.4.6. Control de Equipamientos FACTS ...................................................... VIII-14 VIII.4.7. Control Coordenado de Tensión .......................................................... VIII-14 IX. VIII.4.7.1. Niveles jerárquicos .......................................................................... VIII-15 VIII.4.7.2. Beneficios de una Coordinación de Potencia Reactiva ................... VIII-16 INTRODUCCION A ESTABILIDAD PARA PEQUENAS PERTURBACIONES ..................................................................................................IX-1 IX.1 Modelo Dinámico de Sistema ...............................................................................IX-1 IX.2 Punto de Equilibrio ...............................................................................................IX-1 IX.3 Linealización .........................................................................................................IX-2 IX.4 Ecuación de Estado de un Sistema de Potencia ....................................................IX-3 IX.5 Modelo Clásico del Generador .............................................................................IX-4 X. ESTABILIDAD DE TENSIÓN .................................................................................... X-1 X.1 Conceptos Básicos y Definiciones ........................................................................ X-1 X.2 Análisis Estático.................................................................................................... X-1 X.3 Estabilidad de tensión en pequeña perturbación ................................................... X-2 X.4 Estabilidad transitoria de tensión en grande perturbación .................................... X-2 X.5 Estabilidad de Mediano a Largo Plazo .................................................................. X-2 X.6 XI. X.5.1. Estabilidad de tensión de mediano plazo ................................................... X-2 X.5.2. Estabilidad de tensión de largo plazo ......................................................... X-2 Límite de Capacidad de Generación de Potencia Reactiva.................................... X-3 X.6.1. Límite da Corriente de Armadura .............................................................. X-4 X.6.2. Límite da Corriente de Campo ................................................................... X-4 X.6.3. Límite por calentamiento en extremidad de armadura .............................. X-5 AUTO–EXCITACION ................................................................................................XI-1 XII. REFERENCIAS ......................................................................................................... XII-1 XIII. APENDICE ............................................................................................................... XIII-1 XIII.1 Ejemplo de Inestabilidad de Tensión en la Interconexión Norte-Sur ................ XIII-1 Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 10 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 I. SISTEMAS DINAMICOS La Figura 1 representa un sistema mecánico a ser modelado, compuesto de una masa que está conectada a un accesorio referencial a través de un resorte y de un amortiguador. K f M B x(t) Figura 1. Sistema Masa-Resorte De acuerdo con la segunda ley de Newton, las siguientes relaciones son válidas: d 2x dx B K 1 M 2 f t Kx B x x x f t (I.1) dt dt M M M La inercia del sistema mecánico, asociada a la masa en caso de movimiento de traslación, marcas con las que la posición del objeto no puede variar instantáneamente. Para expresar matemáticamente esta característica, se torna necesario el uso de ecuaciones diferenciales y, por tanto, la posición del cuerpo pasa a ser una función de tiempo que atiende a la ecuación (I.1). La Figura 2 representa un circuito RLC en serie, en el que la tensión del capacitor es la variable de interés. bg bg R L u C y Figura 2. Circuito RLC Serie Para este circuito puede escribirse que di L Ri y dt dy i C dt R| S| T u LC d2 y dt 2 RC dy dt y u (I.2) resultando una ecuación diferencial con la misma forma de la ecuación general (I.1). En el caso del circuito eléctrico, la corriente sobre el inductor no puede variar instantáneamente, así como la tensión sobre el capacitor. Son estas características que hacen con que el modelo matemático del sistema sea una ecuación diferencial. La Figura 3 presenta dos gráficos de soluciones típicas de las ecuaciones (I.1) o (I.2), dependiendo del valor de los parámetros M, B y K o L, R y C, respectivamente. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência I-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 resposta ao degrau 2 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 0 0.005 0.01 0.015 0.02 0.025 0.03 tempo (s) Figura 3. Respuesta al Escalón del Sistema de 2º Orden La Figura 3.a muestra diversos fenómenos dinámicos que aparecen en sistemas de potencia y sus respectivas constantes de tiempo. Descargas Atmosféricas Chaveamentos Ress. Subsíncrona Est. Trans./Dinâmica Din. Longo Prazo CAG Demanda 10e-7 10e-6 10e-5 10e-4 10e-3 10e-2 1 grau (60Hz) 0.1 1 ciclo 1.0 10 100 10e3 10e-4 10e-5 (segundos) 1 minuto Figura 3.a. Fenómenos Dinámicos en Sistemas de Potencia Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência I-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 II. INTRODUCCION A LA SISTEMAS DE POTENCIA ESTABILIDAD DE II.1. Conceptos Básicos y Definiciones La estabilidad de un sistema es una condición de equilibrio entre fuerzas opuestas. mecanismo en el cual máquinas sincronías interconectadas mantienen el sincronismo en relación unas a otras, es a través de fuerzas restauradoras que aparecen siempre cuando existen fuerzas que tienden a acelerar o desacelerar una o más máquinas con respecto a las otras máquinas. En el estado de régimen permanente, existe un equilibrio entre el torque mecánico motriz y el torque de carga eléctrica en cada máquina, haciendo con que la velocidad del rotor permanezca constante. Si el sistema es perturbado, este equilibrio es deshecho, resultando en aceleración o desaceleración de los rotores de las máquinas que son regidas por las leyes del movimiento rotacional de un cuerpo. Si un generador temporariamente se acelerar en relación a otro generador, la posición angular de su rotor en relación al rotor de la máquina más lenta avanzará. Esta diferencia angular hace con que parte de la carga del generador más lento se transfiera para el generador más rápido, dependiendo de la curva Potencia-Ángulo. Este fenómeno tiende a reducir la diferencia de velocidad, e por consiguiente la diferencia angular, entre los dos generadores. La relación Potencia-Ángulo es no lineal y, después de un cierto límite, un aumento en la separación angular es acompañado con una disminución de la potencia transferida; esto hace aumentar aún más la separación angular entre las máquinas aumentando el fenómeno de la inestabilidad, o pérdida de sincronismo. En cualquier situación, la estabilidad del sistema la estabilidad del sistema dependerá de la existencia de suficientes torques restauradores después de una perturbación. Cuando una máquina síncrona pierde e sincronismo del resto del sistema, su rotor gira en una velocidad mayor o menor que necesita para generar tensiones en la frecuencia nominal do sistema. El deslizamiento entre el campo del estator, que corresponde a la frecuencia del sistema, y el campo del rotor, resulta en grandes fluctuaciones en la potencia de salida de la máquina, en las corrientes y tensiones, esto hace con que el sistema de protección aísle la máquina del resto del sistema. La pérdida de sincronismo puede ocurrir entre un generador y o el resto del sistema, o entre grupos de generadores. En este último caso, el sincronismo podrá ser mantenido en los sistemas aislados. En sistemas de potencia, el cambio del torque eléctrico de una máquina síncrona después de una pequeña perturbación puede ser descompuesta en dos componentes: Te KS KD (I.3) donde KS (= TS) es una componente de variación de torque en fase con la perturbación del ángulo del rotor y es referida como componente de torque sincronizante; KS es el coeficiente del torque sincronizante. Ya la parte KD (= TD) es la componente de la variación del torque en fase con la perturbación de la velocidad y es referida como componente de torque de amortiguamiento; KD es el coeficiente de torque de amortiguamiento. La estabilidad del sistema depende de la existencia de las dos componentes de torque para cada máquina síncrona. La insuficiencia del torque de sincronismo resulta una inestabilidad aperiódica del ángulo del rotor. Por otro lado, la insuficiencia del torque de amortiguamiento, resulta una instabilidad oscilatoria del ángulo del rotor. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência II-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Para facilidad del entendimiento del fenómeno de la estabilidad angular en sistemas de potencia, es usual la clasificación del fenómeno en las siguientes dos categorías: (a)Estabilidad frente a pequeñas perturbaciones es la habilidad del sistema de mantenerse en sincronismo frente a pequeñas perturbaciones. Estas perturbaciones ocurren continuamente en el sistema debido a pequeñas variaciones de carga y generación. Una perturbación es considerada suficientemente pequeña si no tendrá considerable pérdida de precisión cuando se analiza el fenómeno a través de un modelo linealizado. La inestabilidad resultante puede ser de dos formas: (i) aumento monotónico (aperiódico) en el ángulo del rotor debido a insuficiencia del torque sincronizante, o (ii) de las oscilaciones angulares de la amplitudes crecientes debido a la insuficiencia del torque de amortiguamiento. La naturaleza de la respuesta del sistema debido a una pequeña perturbación depende de un número de factores donde se incluyen, entre otros, la condición inicial del sistema, el sistema de transmisión y el tipo de los sistemas de excitación utilizados. Para un generador sin sistema de excitación conectado radialmente a un gran sistema de potencia, la acontece una inestabilidad debido a la insuficiencia de torque de sincronismo. Que hace que el sistema pierda la estabilidad aperiodicamente. En el caso en que el generador posee un sistema de excitación, el que acontece en general, es una perdida de sincronismo oscilatoria debido a la insuficiencia de torque de amortiguamiento. La Figura 4 ilustra la naturaleza del fenómeno de instabilidad relacionada a los torques de sincronismo y de amortiguamiento. Estable TS 0 TD TD 0 tempo TS TD Inestable aperiódico TS 0 TD 0 TS tempo Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência II-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Inestable oscilatorio TS 0 TD 0 TS tempo TD Figura 4. Respuesta Dinámica después de Pequeñas Perturbaciones En los sistemas de potencia actuales, la estabilidad frente a pequeñas perturbaciones, está casi siempre relacionada con la insuficiencia de amortiguamiento de oscilaciones. La estabilidad de los siguientes modos de oscilaciones es evaluada: Modos locales – son asociados a las oscilaciones entre las unidades generadoras y el resto del sistema. En ese caso las unidades generadoras de una planta de generación oscilan coherentemente contra el sistema. Modos intraplanta – con asociados a las oscilaciones entre las unidades generadoras de una misma planta de generación. Modos entre áreas – son asociados a las oscilaciones entre grupos de generadores de una parte del sistema contra otro grupo de generadores en otra parte del sistema. En general, aparecen cuando dos áreas son conectadas por intermedio de un sistema de transmisión de alta impedancia. Modos de control – son asociados a las oscilaciones causadas por los controles de los sistemas de excitación, reguladores de velocidad, conversores CA/CC, etc. Modos torsionales – son asociados con los componentes rotacionales de los ejes de la turbina y del generador. La instabilidad de los modos torsionales puede ser causada por la interacción con los sistemas de excitación, controles de sistemas CCAT, y líneas de transmisión con compensación serie. (b) Estabilidad frente a grandes perturbaciones (estabilidad transitoria) es la habilidad de un sistema de potencia mantenerse en sincronismo cuando sujeto a una gran perturbación, como un corto-circuito trifásico y una pérdida de un tronco de transmisión. La respuesta del sistema, en estos casos, envuelve grandes excursiones de los ángulos de los rotores, siendo entonces altamente influidos por la relación no lineal de la potencia eléctrica con el ángulo del rotor. La estabilidad va a depender del punto inicial de operación y de la naturaleza y duración de la perturbación. II.2. Clasificación de la Estabilidad de Sistemas de Potencia A pesar de la estabilidad en sistemas de potencia se un problema único, no es conveniente o incluso factible estudiarlo de forma única. Varias formas de estabilidad acontecen en un sistema de potencia, donde son influidas por varios factores diferentes. EL estudio de los problemas de estabilidad, la identificación de los factores esenciales que influyen en la inestabilidad del sistema y la formación de métodos que mejoran la seguridad de la operación, son mejor entendidas si las diversas formas de estabilidad fueran clasificadas en diferentes categorías. Esas son basadas en las siguientes consideraciones: La naturaleza física de la inestabilidad. Tamaño de la perturbación considerada. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência II-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Los equipamientos, los procesos y el dominio del tiempo que deben ser considerados de forma para determinar la estabilidad. Método más apropiado para el cálculo o previsión de la estabilidad. La Figura 5 muestra el cuadro general del problema de estabilidad en sistemas de potencia, identificando sus clases y sub-clases en términos de las categorías previamente mencionadas. ESTABILIDADE DE SISTEM AS DE POTÊNCIA Capacidade de perm anecer em equilíbrio operativo Equilíbrio entre forças em opos ição ESTABILIDADE ANGULAR ESTABILIDADE DE TENSÃO Capacidade de m anter perfil de tens ão aceitável em regime perm anente Capacidade de m anter sincronism o Equilíbrio de torques nas m áquinas síncronas ESTABILIDADE A PEQUENAS PERTURBAÇÕES Métodos Lineares Balanço de potência reativa ESTABILIDADE TRANSITÓRIA ESTABILIDADE M ID-TERM ESTABILIDADE LONG-TERM GRANDES PERTURBAÇÕES PEQUENAS PERTURBAÇÕES Relações PxV e QxV em regim e perm anente Grandes perturbações Perturbações severas Grandes perturbações Prim eiro swing Grandes excursões de tensão e freqüência Eventos chaveados Margem de estabilidade Estudos até 10 s INSTABILIDADE APERIÓDICA Torque de sincronism o ins uficiente INSTABILIDADE OSCILATÓRIA Dinâm ica rápida e lenta Período de es tudo de vários m inutos Freqüência do sistem a cons tante e uniforme Dinâm ica lenta Dinâm ica de OLTC e cargas Coordenação de proteção e controles Período de es tudo de dezenas de m inutos Reserva de reativo Ponto de Colapso Métodos Lineares Torque de am ortecim ento insuficiente Ação de controle desestabilizante MODOS LOCAIS MODOS INTER-ÁREAS MODOS DE CONTROLE MODOS TORSIONAIS Figura 5. Clasificación de Estabilidad en Sistemas de Potencia Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência II-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 III. ESTABILIDAD TRANSITORIA Estabilidad transitoria es la habilidad del sistema de potencia mantener su sincronismo después de sufrir una gran perturbación, como por ejemplo, u corto circuito, pérdida de generación, o pérdida de una gran carga. La respuesta del sistema para tales perturbaciones envuelve grandes variaciones de los ángulos de los rotores de los generadores, flujos de potencia, valor de las tensiones, y otras variables. La estabilidad frente a grandes perturbaciones es influida por las características no lineales de los sistemas de potencia. La pérdida de sincronismo debido a la inestabilidad transitoria es usualmente percibida en los primeros segundos después del disturbio. III.1 Una Visión Elemental de la Estabilidad Transitoria Considere el sistema mostrado en la Figura 6. Está compuesto de un generador conectado a un gran sistema, representado por una barra infinita, a través de un transformador elevador y dos líneas de transmisión. EB Et X1 Xtr X2 Figura 6. Sistema Máquina x Barra Infinita Presentaremos conceptos fundamentales y principios de estabilidad transitoria a través de un análisis simple envolviendo modelos simplificados. Las resistencias son despreciadas, el generador es representado por un modelo clásico y la actuación del regulador de velocidad también es despreciada. El circuito equivalente es mostrado en la Figura 7. La tensión tras la reactancia transitoria (X’d) es representada por E’. El ángulo representa el ángulo de la tensión E’ en relación al ángulo de la tensión de la barra infinita Eb tomada como referencia. La reactancia XT representa la reactancia equivalente entre la tensión interna del generador E’ y la tensión de la barra infinita Eb. Cuando el sistema es perturbado, la magnitud de E’ permanece inalterada y se altera debido la variación de la velocidad del rotor del generador en relación a la velocidad síncrona 0. XT E' Pe EB 0 Figura 7. Circuito Equivalente Reducido del Sistema Máquina x Barra Infinita Recuérdese que la potencia eléctrica activa entregada por un generador es dada por la Ecuación (II.1). E Eb Pe sin Pmax sin (II.1) XT Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência III-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Como la resistencia del estator fue despreciada, Pe representa no solo la potencia activa en el entre-hierro, así como, la potencia terminal del generador. La curva Potencia-Ángulo con las dos líneas en servicio es representada en la Figura 8 como Curva 1. La potencia eléctrica Pe generada, en régimen permanente, se iguala la potencia mecánica Pm entregada al generador, este punto de operación es representado por el punto a en la Curva 1. El ángulo correspondiente es a. 1.6 1.4 Pe com ambas LT's em serviço 1 1.2 P 1 2 Pm 0.8 a b Pe com LT #2 fora de serviço 0.6 0.4 0.2 0 0 20 a 40 b 60 80 100 120 140 160 180 (graus) Figura 8. Relación Potencia – Ángulo del Sistema Máquina x Barra Infinita Si una de las líneas está fuera de servicio, la reactancia de transferencia X T es mayor. La curva Potencia-Ángulo con una de las líneas fuera de servicio es representada en la Figura 8 como Curva 2. En este caso, la máxima potencia a ser transferida es menor. Con la misma potencia mecánica Pm entrega al generador, el ángulo ahora es b, que corresponde al punto b en la Curva 2. Con una reactancia de transferencia mayor, el ángulo debe ser mayor de forma que la misma potencia eléctrica pueda ser transmitida. III.2 Respuesta a un Escalón de Potencia Mecánica Vamos a analizar el comportamiento transitorio del sistema, con las dos líneas en servicio, cuando la potencia mecánica entregada al generador sufre una variación en escalón de un valor inicial Pm0 a un valor final Pm1 como se muestra en la Figura 9. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência III-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 1.6 1.4 1 Área A1 c 1.2 Pm1 P 1 Pm0 0.8 Área A2 b a 0.6 0.4 0.2 0 0 20 0 40 1 m 60 80 100 120 140 160 180 (graus) Figura 9. Respuesta al Escalón de Potencia Mecánica Debido a la inercia del rotor, el ángulo no puede variar instantáneamente del valor inicial 0 para 1, correspondiendo al nuevo punto de equilibrio b donde Pe = Pm1. La potencia mecánica es mayor que la potencia eléctrica, lo que hace que el rotor comience a acelerar de forma que alcance el punto de equilibrio b, trazando la curva Pe- . La diferencia entre Pm1 e Pe en cualquier instante representa la potencia acelerante. Cuando el punto b es alcanzado, la potencia acelerante es cero, sin embargo la velocidad del rotor es mayor que la velocidad síncrona 0. De esta forma, el ángulo del rotor continua en aumento. Para valores de mayores que 1, Pe es mayor que Pm1, entonces, el rotor desacelera hasta que un ángulo máximo m sea alcanzado y el rotor este nuevamente en la velocidad síncrona, sin embargo Pe es ahora mayor que Pm1. El rotor continúa la desaceleración a una velocidad abajo de la velocidad síncrona; el punto de operación retrasa a la curva Pe- de c para b y de vuelta para a. El ángulo del rotor, entonces oscila indefinidamente alrededor del nuevo punto de equilibrio 1. En la practica, existen varias fuentes de amortiguamiento positivo en el sistema (enrollamientos de amortiguamiento, señales adicionales estabilizantes, etc.), que hacen con las que estas oscilaciones se amortiguan alcanzando el punto de equilibrio b. III.3 Criterio de las Áreas Iguales Para el modelo en cuestión, no es necesario resolver explicitamente la ecuación de oscilación (II.2) para que se determine si el ángulo del rotor aumenta indefinidamente u oscila alredor de un punto de equilibrio. d2 0 Pm Pe (II.2) 2 dt 2H Informaciones relacionadas a la excursión máxima del ángulo ( m) y al límite de estabilidad poden ser obtenidas gráficamente por la curva Potencia-Ángulo. A pesar de este método no es aplicado al caso multimáquinas con modelos detallados de los generadores, esto ayuda a entender conceptos básicos que influyen en la estabilidad transitoria de cualquier sistema. En (II.2) Pe es una función no lineal de , y entonces (II.2) no puede ser explícitamente solucionada. Si ambos lados fueran multiplicados por 2 d , e integrando se llega a: dt b Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência g III-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 LM d OP N dt Q z 2 0 bP m Pe gd (II.3) H Para una operación estable, el desvio de la velocidad d /dt debe ser limitado, alcanzando un valor máximo (punto c en la Figura 9) y entonces, cambiando de dirección. Para eso la variación de la velocidad d /dt se torna cero después de algún tiempo después del disturbio. De la Ecuación (II.3) se puede quitar el siguiente criterio de estabilidad. Pe m 0 Pm d 0 (II.4) 0 H donde 0 es el ángulo inicial del rotor y m es el ángulo máximo del rotor, conforme mostrado en la Figura 9. Entonces, el área abajo de la función Pm-Pe debe ser cero si el sistema fuera estable. En la Figura 9, esta condición es satisfecha cuando el área A1 es igual al área A2. Cuando el ángulo pasa de 0 para 1, la energía mecánica es transferida para el rotor en la forma de energía cinética, haciéndolo acelerar. Esta energía es calculada por b z zb zb 1 E1 Pm g g Pe d 0 área A1 La energía perdida durante la desaceleración cuando pasa de m E2 Pe g Pm d 1 (II.5) 1 para m área A 2 es (II.6) Como todas las pérdidas fueron ignoradas, la energía de ganancia es igual a la energía perdida, entonces el área A1 es igual al área A2. Este hecho forma la base del criterio de las áreas iguales. Este criterio nos permite calcular el máximo ángulo para que la estabilidad se mantenga, sin que sea necesario una solución explícita da la ecuación de oscilación. El criterio también puede ser utilizado para determinar el máximo aumento posible de la potencia mecánica Pm. La estabilidad es mantenida solamente se existe una área A2 por lo menos igual al área A1 localizada arriba de Pm1. Si A1 es mayor que A2, la estabilidad será perdida, pues m > L ( L = 180 - 1). Eso se debe al hecho de que para > L, Pm1 es mayor que Pe e el torque líquido es acelerante al contrario de desacelerante. III.4 Respuesta a un corto-circuito Vamos a considerar la respuesta del sistema para un corto-circuito trifásico localizado en el punto F, conforme mostrado en la Figura 10.(a). El circuito equivalente, cuando asumiendo un modelo clásico para el generador, es mostrado en la Figura 10.(b). El corto es eliminado por la abertura de los disyuntores localizados en las extremidades del circuito en corto. EB Et X1 Xtr F X21 X22 (a). Diagrama Unifilar Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência III-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 X1 X'd Xtr F X21 E' X22 EB 0 (b). Circuito Equivalente Figura 10. Sistema Máquina x Barra Infinita con Corto Circuito en la Línea Si la localización de la falla F por una barra de alta tensión del generador, ninguna potencia es transmitida para la barra infinita. La corriente del corto-circuito fluye del generador para la falla a través de las reactancias. Entonces, luego que la potencia reactiva fluye en el sistema, haciendo con que la potencia activa Pe y el torque eléctrico correspondiente Te diferente a cero en el entrehierro durante la falla. Si la localización de la falla F para una cierta distancia de la barra de alta tensión, conforme mostrado en las Figuras 10.(a) y 10.(b), alguna potencia activa es transmitida para la barra infinita durante la falla. Las Figuras 11.(a) y 11.(b) muestran la curva Pe x para tres condiciones de la red: (i) pré-falla con dos circuitos en servicio; (ii) con una falla trifásica en el circuito 2 localizada a una cierta distancia de la barra de alta tensión; post-falla con el circuito 2 fuera de servicio. (iii) 1.6 Pe com LT #2 fora de serviço 1.4 Pe com ambas LT's em serviço 1.2 P 1 d Pm 0.8 f a Pe durante a falta e 0.6 0.4 c 0.2 b 0 0 20 0 40 c1 60 80 100 120 m 140 160 180 (graus) (a). Sistema Estable Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência III-5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 1.6 Pe com LT #2 fora de serviço 1.4 Pe com ambas LT's em serviço 1.2 d P 1 Pm 0.8 Pe durante a falta e a 0.6 0.4 c 0.2 b 0 0 20 0 40 60 c2 80 100 120 140 160 180 (graus) (b). Sistema Inestable Figura 11. Relación Pe x para Sistema Máquina x Barra Infinita con Corto Circuito Vamos a examinar el caso estable de la Figura 11.(a) (i) sistema está operando con los dos circuitos en servicio con Pe = Pm y = 0. (ii) Ocurre el corto circuito, alterando el punto de operación instantáneamente de a para b. (iii) Debido a la inercia del rotor, el ángulo no cambia instantáneamente. Como ahora Pm es mayor que Pe, el rotor acelera, haciendo que el ángulo aumente hasta que el defecto es eliminado por el aislamiento del circuito 2 del sistema. (iv) En ese instante, el ángulo es dado por c1 (punto c). Con la eliminación de la falla, el punto de operación cambia instantáneamente para el punto d y Pe pasa a ser mayor que Pm. (v) El rotor pasa a desacelerar, pero, como la velocidad es mayor que la velocidad síncrona, el ángulo continúa a aumentar, hasta que toda la energía cinética almacenada en el rotor (área A1) sea suministrada de vuelta para el sistema. En este periodo, el punto de operación se mueve de d para e, donde el área A2 es igual al área A1. (vi) En el punto e, la velocidad es igual a la velocidad síncrona y el ángulo alcanza su valor máximo m. Como Pe aun es mayor que Pm, una potencia desacelerante continúa aplicada sobre el rotor, haciendo que la velocidad decrezca, tornándose menor que la velocidad síncrona. (vii) Angulo comienza, entonces, a decrecer, rehaciendo el camino del punto e para el punto d de la Figura 11.(a). En la ausencia de cualquier fuente de amortización, el rotor continua oscilando indefinidamente con constante de amplitud. En los sistemas reales, siempre existe algún amortiguamiento de forma que el sistema tenderá un nuevo punto de equilibrio. Con un tiempo de eliminación del defecto más largo, conforme mostrado e la Figura 11.(a), el área A2 arriba de Pm es menor que el área A1. Cuando el punto de operación alcance el Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência III-6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 punto e, la energía cinética gana durante el período de aceleración aun no fue totalmente repasada para el sistema e, consecuentemente, la velocidad aun es mayor que la velocidad sincrónica, haciendo que el ángulo continué al aumentando. Además el punto e, Pe es menor que Pm, y el rotor comienza a acelerar nuevamente. La velocidad y el ángulo del rotor continúan al aumentar, llevando al sistema a la perdida de sincronismo. III.5 Factores que influyen en la estabilidad transitoria De las discusiones presentadas en las secciones anteriores, podemos concluir que la estabilidad transitoria es dependiente de los siguientes factores: Cuan cargado están los generadores. La potencia entregada por el generador durante la falla. Esto depende de localización de la falla y el tipo de falla. El tiempo de eliminación de la falla. La reactancia del sistema de transmisión post-falla. La reactancia del generador. Una reactancia baja, aumenta la potencia máxima transmitida y reduce el ángulo inicial. La inercia del generador. Cuanto mayor sea la inercia, menor es la variación del ángulo. Esto hace reducir la energía cinética durante la falla, esto es, el área A1 es reducida. La magnitud de la tensión interna (E') del generador. Esto depende del sistema de excitación. La magnitud de la tensión de la barra infinita (Eb). Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência III-7 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 IV. MODELOS DE MÁQUINAS IV.1 Circuitos Acoplados Magnéticamente Circuitos eléctricos acoplados magnéticamente constituyen la base de la operación de transformadores y máquinas eléctricas. En el caso de los transformadores, estos circuitos estacionarios son acoplados magnéticamente para cambio de niveles de tensión y corriente. En el caso de las máquinas eléctricas, el acoplamiento magnético ocurre entre circuitos que si pusieron en movimiento en relación unos a los otros, al tener como objetivo la transferencia de energía entre los sistemas mecánicos y eléctricos. La figura 12 representa dos circuitos eléctricos estacionarios acoplados magnéticamente. Los circuitos son compuestos por enrollamientos con N1 y N2 espiras, respectivamente, enrolladas en un núcleo común de material ferromagnético, i. e., un material cuya permeabilidad magnética es mucho mayor que el del aire ( 0 = 4 .10-7 H/m). m1 R1 R2 l1 l2 m2 Figura 12. Circuitos Eléctricos Acoplados Magnéticamente El flujo magnético que alcanza cada bobina puede ser descrito, aproximadamente, como 1 1 2 2 m1 m1 m2 (III.1) m2 Donde el flujo de dispersión 1 es producido por la corriente circulando por el enrollamiento 1 y enlaza solo las espiras del enrollamiento 1. De la misma manera, el flujo de dispersión 2 es producido por la corriente del enrollamiento 2 y enlaza solo las espiras del enrollamiento 2. Ya el fluyo de magnetización m1 es producido por la corriente del enrollamiento 1 y enlaza todas las espiras de los enrollamientos 1 y 2. El flujo de magnetización m2 es producido por la corriente del enrollamiento 2 y enlaza todas las espiras de los enrollamientos 1 y 2. Los flujos de magnetización producidos por cada uno de los enrollamientos pueden estar en el mismo sentido o en sentidos opuestos, conforme la dirección de las corrientes. Si ellos estuvieran en el mismo sentido, el flujo magnético total en el núcleo será la suma de los flujos de magnetización producidos por cada enrollamiento. Por otro lado, si los sentidos fuesen opuestos, el flujo magnético total será la diferencia entre los flujos de magnetización. En este caso, se dice que un de los enrollamientos está magnetizando el núcleo y el otro estará, por tanto, desmagnetizando. El enlace de flujo de un enrollamiento definido como Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 N (III.2) y, utilizándose la teoría de circuitos magnéticos [4, 2, 1], se puede escribir el flujo magnético en función de la corriente del enrollamiento y de la geometría del problema: Ni R (III.3) donde N.i es la fuerza magnetomotriz del enrollamiento y R es la reluctancia del circuito magnético, definida como l R (III.4) A donde l es la longitud medio del camino magnético, A es el área transversal y es la permeabilidad magnética del medio. Utilizando las relaciones (III.3) y (III.4), los flujos magnéticos mostrados en la Figura 12 y descritos por al ecuación (III.1) pueden ser expresados como N1 i1 N1 i1 N 2 i2 1 R1 Rm Rm (III.5) N 2 i2 N1 i1 N 2 i2 2 R 2 Rm Rm donde R1 y R2 son las reluctancias asociadas a los flujos de dispersión de los enrollamientos 1 y 2, respectivamente, y Rm es la reluctancia asociada a los flujos de magnetización, siendo común a los dos enrollamientos. Los enlaces del flujo de los enrollamientos será dado, por tanto, por 1 N12 i1 R1 N12 i1 Rm N1 N 2 i2 Rm (III.6) N 22 N 22 N1 N 2 i2 i2 i1 2 R1 Rm Rm La inductancia de un circuito es definida como la relación entre el enlace de flujo y la corriente. Para el sistema magnético de la Figura 12, se puede escribir que N12 N12 L11 L1 Lm1 R1 Rm L22 N 22 R 2 N 22 Rm L12 L21 N1N 2 Rm L 2 Lm2 (III.7) donde L1 y L2 son las inductancias de dispersión y Lm1 y Lm2 son las inductancias de magnetización de los enrollamientos 1 y 2, respectivamente. Las inductancias de magnetización y las inductancias mutuas L12 y L21 dependen de la reluctancia Rm y las siguientes relaciones son válidas: Lm2 Lm1 N 22 N12 (III.8) N2 N1 L12 Lm1 Lm2 N1 N2 Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Utilizando estas expresiones para las inductancias, los enlaces del flujo pueden ser escritos como L11 i1 L12 i2 L11 L12 i1 1 1 (III.9) Li L12 i1 L22 i2 L12 L22 i2 2 2 Considerando toda la resistencia del enrollamiento concentrada en un único elemento, se puede escribir, para cada enrollamiento, que d (III.10) v ri e ri dt o, matricialmente, para todos los enrollamientos del sistema LM OP LM N Q N OP LM OP QN Q d (III.11) dt La ecuación (III.11) será utilizada para el modelamiento de la máquina síncrona y, en general, las ecuaciones son escritas refiriéndose a las variable a una misma base o en el sistema por unidad (p.u.). De esta forma, se puede hacer que la inductancia de magnetización de los enrollamientos tenga el mismo valor. Esta ecuación, con todo, solo es válida para sistemas magnéticos lineales. En el caso de los equipamientos eléctricos (transformadores y máquinas), es usual a la existencia de saturación magnética y de la histéresis (equipamientos en CA), efectos nítidamente no-lineales. En la practica, los modelos para estos equipamientos son obtenidos a partir de la ecuación (III.11) y corregidos, cuando necesario, para considerar los efectos de las no-linealidades. La simulación computacional de este sistema puede ser realizada por la integración numérica de la ecuación (III.11), considerándose que las corrientes y los enlaces de flujo son relacionados por la ecuación (III.9). Considerándose las ecuaciones en p.u., se puede escribir que 1 i1 1 m L1 i1 L1 1 m (III.12) 1 L 2 i2 2 m i2 2 m L 2 donde v ri R| S| |T RS T m b Lm i1 i2 FG 1 HL g Lm IJ K LM 1 b NL 1 1 b b m g 1 L 2 g g b 2 m gOPQ 1 1 1 1 m 1 2 L1 L 2 L1 L 2 m El efecto de la saturación magnética puede ser incorporada al problema si la característica de magnetización (curva de magnetización) fuera conocida. Esta puede ser obtenida a partir de ensayo en el vacío del equipamiento, donde se desconsidera si la caída de la de tensión en la resistencia del enrollamiento y, por tanto, la tensión aplicada es proporcional a la variación del enlace del flujo. La Figura 13 presenta una curva de magnetización típica. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 m Lm1(i1+i2) i1+i2 i Figura 13. Curva de Magnetización Típica Por hipótesis, se considera que el flujo magnético de dispersión cierra su camino magnético solo por el aire y, por tanto, no está sujeto a la saturación del material magnético. De esta forma, la saturación magnética afecta sólo en enlace del flujo mutuo m. En la región nosaturada, la inclinación de la curva m x i es dada por Lm. Para valores elevados de corriente, la curva de magnetización se aleja de la característica no-saturada y, así, se puede escribir que (III.13) Lm i1 i2 f m m donde f( m) puede ser determinada a partir de la curva de magnetización mostrada en la Figura 13. b g b g IV.2 Conversión Electromecánica de Energía En general, los equipamientos utilizados para la conversión de energía mecánica en energía eléctrica (generadores) y para la conversión de energía eléctrica en energía mecánica (motores) utilizan un campo magnético como medio común de interacción entre los sistemas mecánico y eléctrico. La figura 14 presenta un diagrama de bloques simplificado de este tipo de arreglo, donde la energía puede fluir en cualquier dirección. SISTEMA ELÉTRICO CAMPO MAGNÉTICO DE ACOPLAMENTO SISTEMA MECÂNICO Figura 14. Diagrama de Bloques de un Sistema de Conversión Electromecánica de energía En general, hay pérdidas de energía tanto en el sistema mecánico como en los sistemas eléctricos y magnéticos. Las principales pérdidas serán debidas al roce (sistema mecánico), efecto Joule (sistema eléctrico) y corrientes parásitas y histéresis (sistema magnético). La Figura 15 muestra un arreglo simples de un sistema de conversión electromecánica de energía. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 K R L + f i M v fe D x(t) Figura 15. Sistema de Conversión Electromecánica de Energía El sub-sistema eléctrico de la Figura 15 puede ser modelado por la siguiente ecuación: di (III.14) v ri L ef dt donde ef es la caída de tensión sobre el enrollamiento. Ya el sistema mecánico puede ser representado por d 2x dx f M 2 D K x x0 fe (III.15) dt dt donde fe es la fuerza electromagnética que surge debido al campo magnético, M es la masa, D es el coeficiente de amortización, K es la constante del resorte y x0 es la posición de equilibrio del resorte. La energía provista por la fuente eléctrica puede ser calculada como di WE v i dt ri L e f i dt dt (III.16) b z z FGH z z z r i 2 dt L i di g IJ K e f i dt El primer termino representa las perdidas por el efecto Joule, en cuanto al segundo termino representa la energía magnética almacenada fuera del campo magnético de acoplamiento. Por tanto, la energía transferida de la fuente eléctrica para el campo magnético es dada por (III.17) We e f i dt z z Ya para el sistema mecánico, la energía puede ser calculada como d 2x dx WM f dx M dx D dx K x x0 dx f e dx (III.18) 2 dt dt El primer termino corresponde a la energía cinética asociada a la masa del cuerpo, en cuanto al tercer termino corresponde a la energía potencial almacenada en el resorte. El segundo termino corresponde a perdidas por el agotamiento y, por lo tanto, la energía mecánica total transferida para el campo magnético es dada por (III.19) Wm fe dx z z z z zb g z z De esta forma, la energía almacenada en el campo magnético puede ser calculada como (III.20) Wf We Wm e f i dt fe dx Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Esta ecuación puede ser generalizada para o caso de múltiples sistemas eléctricos (J enrollamientos) y mecánicos (K masas), resultando en bW g J Wf bW g K e j (III.21) m k j 1 k 1 o, en la forma diferencial, de i i dt J dWf f j 1 j j b f g dx K e k (III.22) k k 1 Retornando al caso mas simple, representado por la ecuación (III.20), se puede calcular la energía almacenada en el campo magnético alimentado apenas por el sistema eléctrico haciéndose Wm = 0, o sea, impidiéndose el movimiento del sistema mecánico (dx = 0). En este caso, d Wf e f i dt i dt dt (III.23) z z z id La Figura 16 muestra la relación x i de un sistema electromagnético. La energía almacenada en el campo magnético, para un valor de corriente igual a i1 es igual al área A1 mostrada en la figura. 1 A1 A2 i1 i Figura 16. Energía y Co-Energía Almacenada en un Campo Magnético z z z A El área A2 mostrada en la Figura 16 es llamada de co-energía y puede ser calculada como (III.24) Wc di i Wf i id fe dx En un sistema magnético lineal (relación x i dada por una recta) Wc = Wf. Fuera de esta situación, la co-energía tiene poco significado físico, pero es una habilidad conveniente de expresar la energía y utilizar para el cálculo de la fuerza electromagnética fe. La ecuación (III.20) permite escribir que Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Wf fe (III.25) x o, en términos de la co-energía, mostrada en la ecuación (III.24), Wc fe (III.26) x La posición x del sistema mecánico describe completamente la relación entre este y el campo magnético. Ya la influencia de el sistema eléctrico puede ser descrito tanto por (energía) cuanto por i (co-energía), una vez que estas variables no son independientes. Se escoge la opción de la posición x y se el enlace de flujo como variables de estado permite escribir que: Wf b , xg z ib , xg d zb g i ,x d 0 (III.27) y, una vez calculada la energía en el campo magnético, se puede obtener la fuerza electromagnética fe de acuerdo con la ecuación (III.25). Pero, el enlace de flujo es una variable menos “natural” que la corriente, para un ingeniero electricista, una vez que la medición de corrientes es mucho mas simple. De esta forma, es preferible escoger la posición x e a corriente i como variables de estado y, entonces, obtener la co-energía como siendo z b g Wc i, x z bi, xg di i 0 b , xg d (III.28) obteniéndose la fuerza electromagnética a través de la ecuación (III.26). Para el caso de un sistema lineal con múltiples enrollamientos, los enlaces de flujo pueden ser escritos a partir da ecuación (III.9) como siendo L11 x i1 L12 x i2 L1n x in 1 i1 , i2 , , in , x b g bi , i , , i , x g bg L bxg i bg L bxg i bi , i , , i , x g bg bg 2 1 2 n 12 1 22 2 bg L b xg i 2n n (III.29) bg L1n x i1 L2 n x i2 Lnn x in y, tomándose las corrientes y la posición como variables de estado, se puede calcular la coenergía como siendo n 1 2 n b Wc i1 , i2 ,, in , x g z z z i1 0 i2 0 in 0 1 b , i ,, i , x g d bi , , , i , x g d bi , i , , , x g d 2 2 1 n 1 n n (III.30) 2 o, equivalentemente, b Wc i1, i2 ,, in , x g bg L b xg i i 1 L11 x i12 2 1n 1 n bg L b xg i i L12 x i1 i2 12 2 n bg 1 L22 x i22 2 1 Lnn x in2 2 bg (III.31) IV.3 Enrollamiento de la Máquina CA y Fuerza Magnetomotriz Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-7 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 La Figura 17 presenta un diagrama simplificado de una máquina de CA trifásica de 2 polos. El enrollamiento asociado a cada fase tiene su eje magnético desfasado por 120° en relación a los ejes de las demás fases. El enrollamiento de campo está localizado en el rotor y su eje magnético puede girar de acuerdo con el movimiento del rotor. eixo m agnético do cam po eixo m agnético da fase B r a'4 a'3 a'2 a'1 b4 c1 b3 c2 b2 c3 f' 1 f' 2 f' 3 f' 4 f' 5 c4 b'1 s f5 f4 f3 f2 f1 b1 eixo m agnético da fase A c'4 c'3 b'2 c'2 b'3 c'1 b'4 a1 a3 a2 a4 eixo m agnético da fase C Figura 17. Máquina CA Trifásica de 2 polos Los enrollamientos de las fases son considerados idénticos por poseer la misma resistencia y el mismo número de espiras. Además de eso, el paso del enrollamiento es de 180°, i. e., una espira es formada por conductores diametralmente opuestos. La Figura 18 presenta el diagrama resultante de la planificación de la máquina mostrada en la Figura 17. eixo da fas e A eixo do eixo da cam po fas e B eixo da fas e C eixo da fas e A r c'4 c'3 c'2 c'1 a4 a3 a2 a1 b'4 b'3 b'2 b'1 c4 c3 c2 c1 a'4 a'3 a'2 a'1 b4 b3 b2 b1 f3 f4 f5 f' 1 f' 2 f' 3 f' 4 f' 5 eixo do cam po eixo da fas e B eixo da fas e A f1 f2 f3 eixo da fas e C s Figura 18. Diagrama Planificado de los Enrollamientos de la Máquina CA Trifásica Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-8 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 La máquina representada en las Figuras 17 y 18 es una máquina de 2 polos con polos salientes. Esta máquina, en verdad, difícilmente sería construida, pues las máquinas de 2 o 4 polos son máquinas cuya velocidad mecánica es relativamente alta y, es estos casos, el rotor es cilíndrico, resultando en una máquina de polos lisos. Por otro lado, una máquina de polos salientes en general está asociada al un número elevado de polos y, por tanto, a una baja velocidad de rotación. Las velocidades eléctricas y mecánicas en una máquina síncrona están relacionadas al número de polos de la máquina como P (III.32) e m 2 Como la velocidad eléctrica está relacionada a la frecuencia eléctrica de operación de las máquinas, esta debe ser mantenida constante (50 Hz o 60 Hz). La velocidad mecánica, por tanto, es inversamente proporcional al número de polos de la máquina. La fuerza magnetomotriz (FMM) en el entrehierro de la máquina puede ser determinado a partir de la Ley de Ampere: ` (III.33) H d i z L La Figura 19 presenta nuevamente el diagrama planificado de la máquina en que sólo el enrollamiento de la fase A fue representado. La Ley de Ampere será aplicada, entonces, para los caminos cerrados abcd y aefd indicados en la Figura. eixo da fas e A eixo da fas e A 60o f a'4 a'3 a'2 a'1 a4 a3 a2 a1 H A c B H d A H bc ef e b a eixo da fas e A s Figura 19. Diagrama Planificado de la Máquina CA para Cálculo de la FMM Considerando la permeabilidad magnética del material muy mayor que la del aire, la intensidad del campo magnético (H) en el material es despreciable y, por lo tanto, la integral mostrada en la ecuación (III.33) puede ser calculada considerando solo los tramos de los caminos cerraros correspondientes al entrehierro de la máquina. Considerando, aún, una distribución uniforme de los enrollamientos de las fases, cada fase ocupa un arco de 120 en el estator, con 2 secciones de 60 en oposición de fases (desfasadas 180 ) conforme mostrado en la Figura 19. Para el camino cerrado abcd mostrado en la Figura 19, la Ley de Ampere puede ser expresada por z b gdl z bb gg b g H b0gdl H b g gb g H b0g gb0g 0 b g gb g H rb g r bc r 0 bc bc bc bc r 0 g 0 0 (III.34) bc donde r( bc) y r(0) son los radios del rotor y g( en las posiciones correspondientes a los ángulos Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência bc) y g(0) son las longitudes del entrehierro, s = bc y s = 0, respectivamente. IV-9 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Ya para el camino cerrado aefd, la Ley de Ampere resulta en z d idl z bb gg b g H b0gdl H d i gd i H b0g gb0g Ni d i gd i H rd i r ef r 0 ef ef ef ef r 0 N c ia g 0 ef (III.35) c a donde Nc es el número de espiras del enrollamiento de la fase a en la ranura a1 y la señal negativa se debe al hecho que la corriente esta circulando en el enrollamiento, en el sentido indicado en la Figura 19, produce flujo magnético en el sentido opuesto utilizado para el camino de integración. Este raciocinio puede ser repetido para diversos caminos cerrados definidos para diferentes valores de s y la distribución de FMM producida por el enrollamiento de la fase a, a lo largo de la superficie del estator, tiene aproximadamente la forma mostrada en la Figura 20. eixo da fas e A eixo da fas e A a4 a3 a2 a1 a'4 a'3 a'2 a'1 s eixo da fas e A Figura 20. distribución de FMM del Enrollamiento de la Fase a Esta forma de onda puede ser entendida como una aproximación para una función senoidal. Esta aproximación puede ser mejorada a través de diversas técnicas de construcción de las máquinas, como enrollamientos de paso fraccionario y distribución no-uniforme de los enrollamientos. Cuanto mejor es la aproximación, menor será el desequilibrio harmónico de las tensiones y corrientes del estator. El eje magnético de la fase a puede ser interpretado, ahora, como el centro de la región de máxima distribución de FMM del enrollamiento. Es fácil verificar que la distribución de FMM de los enrollamientos de las fases b y c tienen la misma forma que aquella mostrada para la fase a, con desfasaje de 120 en relación a esta. Estas distribución de FMM pueden ser descompuestas en sus componentes harmónicas (serie de Fourier) y, considerando solo el componente fundamental de cada fase, se puede escribir que N FMM a ia cos s 2 N 2 FMM b ib cos s (III.36) 2 3 N 2 FMM c ic cos s 2 3 donde N es el número total de espiras del enrollamiento equivalente de fase. FG H FG H Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IJ K IJ K IV-10 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 La distribución de FMM resultante de los enrollamientos del estator es dada, entonces, por la suma de las distribuciones mostradas en la ecuación (III.36). Si las corrientes de los enrollamientos son corrientes trifásicas equilibradas, se puede escribir que N3 2 FMM I cos et (III.37) ei 0 s 2 2 donde e es la frecuencia angular de las corrientes, ei(0) es el ángulo de fase de las corrientes para t = 0 y I es el valor rms de las corrientes. La ecuación (III.37) representa una onda de FMM que gira con frecuencia igual a las corrientes que la produjeron y, además de eso, corresponde a una distribución senoidal al largo de la superficie del estator (cuando s varía). bg IV.4 Máquina Síncrona Conocidas las distribuciones de FMM en el interior de la máquina síncrona, el modelo eléctrico para la misma es obtenida a partir de la determinación de las inductancias propias y mutuas relacionadas a los diversos enrollamientos. Para esto, es necesario obtener una expresión para la longitud del entrehierro de la máquina. La hipótesis utilizada aquí [2] es que el entrehierro varía senoidalmente conforme 1 g r (III.38) 1 2 cos 2 r b g b g donde r es el ángulo medido en relación al eje magnético del enrollamiento del campo (asociado a la posición del rotor). Del punto de vista del estator, el entrehierro puede ser escrito como 1 (III.39) g s r 1 2 cos 2 s r b g b g donde r es la posición del rotor en relación al estator, variando conforme la rotación del mismo. La densidad de flujo magnético puede ser definida a partir de la fuerza magnetomotriz como FMM B (III.40) 0 g y, aplicando la ecuación (III.40) asociada las ecuaciones (III.36) y (III.39), se obtiene N Ba s , r ia cos s 1 0 2 cos 2 s r 2 N 2 (III.41) Bb s , r ib cos s 0 1 2 cos 2 s r 2 3 b b Bb c s , r g g g 0 b gn FG IJ n H K N F 2 IJ n i cosG H 3K 2 c s b 1 2 gs b cos 2b s r gs gs Ya la densidad del flujo magnético producida a partir del enrollamiento del rotor puede ser dada por N fd (III.42) B fd r i fd sin r 1 0 2 cos 2 r 2 Las inductancias (propias o mutuas) son calculadas a partir de la relación entre el flujo enlazado por un enrollamiento y la corriente que crea este flujo. La determinación del flujo b g Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência b g b g IV-11 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 magnético pode ser hecha a partir de la densidad del flujo y es posible mostrar que las inductancias de la máquina síncrona pueden ser expresadas como 2 Laa L LA LB cos 2 r Lbb L LA LB cos 2 r 3 Lcc Lab Lbc Lbfd FG IJ b g H K F 2 IJ L L L L L L cos 2G H 3K 1 F IJ L 1 L L cosFG 2 IJ L L cosG 2 H 3K H 3K 2 2 1 L L cosb2 g L L cos 2 F 2 IJ L L cosFG 2 IJ L cosG H 3K H 3K A B r A B r A B r sfd ac cfd sfd sfd FG N IJ rl L H 2K FG N IJ FG N IJ rlFG H 2 KH 2 K H FG N IJ rlFG H2K H Lsfd 0 1 2 Lmfd 0 1 (III.43) 2 0 rl 2 IJ 2K f f r r FG N IJ H 2K B 0 B r 2 LA mfd A afd r donde fd fdfd 2 1 IJ 2K 2 siendo r el radio medio el entrehierro y l es la longitud axial del estator. En una máquina síncrona real, es posible encontrar enrollamientos corto-circuitados montados en el rotor, llamados enrollamientos amortiguadores. En máquinas de rotor cilíndrico, hay la posibilidad de circulación de corrientes parásitas, cuyo efecto es parecido con los enrollamientos amortiguadores. De esta forma, un modelo completo para la máquina síncrona debe permitir la incorporación de circuitos equivalentes para este tipo de enrollamiento. La determinación de las inductancias propias y mutuas asociadas a estos enrollamientos puede ser hecha de forma similar a lo presentada arriba. Para cada enrollamiento de la máquina, se puede escribir una ecuación de tensión equivalente a lo mostrada en la ecuación (III.10), resultando d a va ra ia dt d b vb rb ib dt d c vc rc ic dt (III.44) d fd v fd rfd i fd dt d kd vkd 0 rkd ikd dt d kq vkq 0 rkq ikq dt Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-12 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 donde a Laa ia Labib Lac ic Lafd i fd Lakd ikd Lakq ikq b Labia Lbbib Lbc ic Lbfd i fd Lbkd ikd Lbkq ikq c Lac ia Lbc ib Lcc ic Lcfd i fd Lckd ikd Lckq ikq fd Lafd ia Lbfd ib Lcfd ic L fdfd i fd kd Lakd ia Lbkd ib Lckd ic L fdkd i fd (III.45) L fdkd ikd Lkdkd ikd Lakq ia Lbkq ib Lckq ic Lkq ikq y los suscritos kd y kq están asociados los enrollamientos amortiguadores del eje d y q, respectivamente. Se debe notar que las inductancias mutuas entre los enrollamientos del eje d (fd y kd) y el enrollamiento del eje q (kq) son nulas, debido a la ortogonalidad entre estas ejes. Las ecuaciones (III.44) y (III.45) describen completamente la dinámica eléctrica de la máquina síncrona, pero dependen de la posición angular del rotor r, que, a vez, varia con el tiempo. Tomando como ejemplo la expresión para el enlace del flujo del enrollamiento del campo, mostrada en la ecuación (III.45), y sustituyendo los valores de las inductancias mostradas en la ecuación (III.43), se obtiene 2 2 Lsfd ia cos r ib cos r ic cos r L fdfd i fd L fdkd ikd fd 3 3 La parte entre corchetes representa la proyección de las corrientes de las fases abc sobre el eje d, conforme se muestra en la Figura 21. kq LM N FG H IJ K IJ OP KQ FG H q d b 120o- r r a 120o+ r c Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-13 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 21. Interpretación Geométrica de la Transformada de Park En verdad, la transformación ilustrada en la Figura 21 es una simple cambio de ejes de referencia, pudiendo ser expresada por una relación matricial. La transformada de Park usualmente adoptada para la representación de máquinas sincronías es definida por xa cos sin 1 xd (III.46) xb cos 120 sin 120 1 xq LM OP MM x PP N Q c LM MM b Ncosb OP L O g b g P MM PP 120 g sinb 120 g 1PQ MN x PQ 0 o, en notación matricial compacta, (III.47) x abc Tx dq0 La matriz T siempre posee inversa, de modo que la transformación inversa es dada por LMx OP MM xx PP N Q d q 0 2 3 LM cos MM sin N 12 b b cos sin 120 120 1 g g b b cos sin 120 120 1 2 2 g OP LMx OP gP M x P PQ MN x PQ a (III.48) b c o, equivalentemente, x dq 0 T 1x abc (III.49) Se puede aplicar la transformada de Park para transformar grandezas trifásicas como tensión, corriente, carga eléctrica y enlace de flujo de sus coordenadas de fase (abc) para coordenadas dq0 y Viceversa. Aplicando esta transformación a las ecuaciones (III.44) y (III.45), obteniendo el modelo de la máquina síncrona en coordenadas dq0, donde el sistema por unidad fue aplicado de forma que se obtiene una matriz de inductancias simétrica: d q vq riq r d dt d d vd rid r q dt d 0 v0 ri0 dt (III.50) d fd v fd rfd i fd dt d kd vkd 0 rkd ikd dt d kq vkq 0 rkq ikq dt Ls Laq Laq iq q Laq Lkq Laq ikq kq LM MM MM MM N d fd kd 0 OP PP PP PP Q LM MM MM MM N Ls Lad Lad Lad Lad Lfd Lmd Lmd Lad Lmd Lkd Lmd OP LM OP PP MM i PP PP MM i PP PP MM i PP L QN i Q d (III.51) fd kd s 0 La potencia eléctrica de la máquina puede ser expresada por Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-14 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 d i 3 ed id eqiq 2e0i0 2 o, a través de una opción del criterio de las bases para el sistema para la unidad, Ppu ed id eqiq 2e0i0 El torque eléctrico de la máquina síncrona puede ser dado, en por unidad, como Te d iq qid IV.4.1. Circuitos Equivalentes P ea ia ebib ec ic (III.52) (III.53) (III.54) La Figura 22 presenta un circuito magnético equivalente para representar los enlaces de flujo de eje directo, mostrados en la ecuación (III.51). L Lmd Lad ikd i fd id Lfd Lad Lkd d fd kd Figura 22. Circuito Equivalente del Eje d para la Relación xi Este circuito puede ser utilizado para obtener un circuito eléctrico equivalente. En este caso, para incorporar las ecuaciones de tensión, tornándose necesario utilizar las derivadas de los enlaces de flujo. La Figura 23 presenta los circuitos equivalentes de eje d y q para la máquina síncrona. r r - q + L Lmd id Lad i fd ikd Lfd Lkd vd d d dt Lad rfd d d kd dt rkd fd dt + v fd - (a). Eje d Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-15 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 r r d + - L iq ikq2 ikq1 Lkq1 vq d q Lkq 2 Laq dt d d kq1 rkq1 dt kq2 rkq2 dt (b). Eje q Figura 23. Circuitos Eléctricos Equivalentes de la Máquina Síncrona La inductancia Lmd – Lad en el circuito equivalente de eje d representa el efecto del enlace de flujo entre los enrollamientos de campo y amortiguador de eje d y que no enlaza los enrollamientos del estator. Es común suponer que este efecto es nulo (Lmd = Lad), pero existen casos en que este efecto no puede ser descuidado. Por otro lado, no hay enrollamiento de campo en el eje q y los enrollamientos del rotor asociados a este eje representan exclusivamente efectos de los enrollamientos amortiguadores y/o corrientes parásitas circulando en el núcleo del rotor. En este caso, se supone que todos los enrollamientos de eje q enlazan el mismo flujo, representado por Laq. IV.4.2. Parámetros de la Máquina Síncrona Los parámetros (resistencias y inductancias) utilizados para representar la máquina síncrona en las ecuaciones (III.50) y (III.51) describen completamente su comportamiento dinámico y son llamados de parámetros básicos o fundamentales de la máquina síncrona. Con todo, no es posible determinarlos directamente a partir de ensayos y, por tanto, se torna necesaria su determinación de forma indirecta. Esto es hecho a partir de los circuitos equivalentes mostrados en la Figura 23. Es posible escribir relaciones increméntales entre las grandezas del estator y del rotor de la máquina síncrona a partir de la aplicación de la transformada de Laplace en las relaciones derivadas de los circuitos equivalentes: G s E fd s Ld s I d s d s (III.55) s L s I s q q q bg bg bg bg bg bg bg bg donde Ld(s) y Lq(s) son llamadas de inductancias operacionales de la máquina síncrona. Se puede mostrar que los términos de la ecuación (III.55) pueden ser expresados como 1 sTd 1 sTd Ld s Ld 1 sTd 0 1 sTd 0 b gb g b gb g d1 sT id1 sT i L b sg L d1 sT id1 sT i b1 sT g G b sg G b1 sT gb1 sT g bg q q q q0 q0 q (III.56) kd 0 d0 d0 Bajo condiciones de régimen permanente, haciéndose s = 0, se obtiene Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-16 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 bg L b0g Ld 0 q Ld (III.57) Lq que son las inductancias sincronías (de eje d y q, respectivamente) de la máquina. Durante un transitorio muy rápido, haciéndose s , se obtiene T T Ld Ld Ld d d Td 0 Td 0 T T Lq Lq Lq q q Tq 0 Tq 0 bg bg (III.58) que son las inductancias sub-transitorias (de eje d y q, respectivamente) de la máquina. En la ausencia de enrollamientos amortiguadores, el valor límite para la inductancia es dado por T Ld Ld Ld d Td 0 (III.59) Tq Lq Lq Lq Tq 0 bg bg y corresponde a las inductancias transitorias de la máquina. los valores de las inductancias sincronías, transitorias es sub-transitorias, bien como los valores de las constantes de tiempo mostradas en las ecuaciones (III.56) al (III.59) pueden ser obtenidos a partir de ensayos de la máquina síncrona y, en general, son datos suministrados por los fabricantes (datos de placa). Los parámetros básicos de la máquina síncrona pueden ser determinados a partir de los datos usualmente disponibles para la máquina. La ecuación (III.60) presenta las relaciones simplificadas para esta determinación, considerando Lmd = Lad. Estas expresiones pueden ser directamente utilizadas para la determinación de los parámetros de eje q de una máquina representada por dos circuitos amortiguadores de eje q, usual en la modelado de turbogeneradores. Lad Lfd Ld L Lad Td 0 rfd Ld L Ld L Lad Lfd Lad Lfd Lad Lfd Lkd Td 0 F GH 1 Lkd rkd Lad Lfd Lad Lfd I JK (III.60) Lad Lfd Lad Lkd Lfd Lkd En el caso de hidro-generadores, estas máquinas son, en general, de polos salientes y el único circuito de eje q, en el rotor, es el enrollamiento amortiguador. En estos casos, el transitorio de eje q es muy rápido, pasándose del periodo sub-transitorio para el régimen permanente sin un período transitorio característico. La máquina posee, entonces, inductancias síncrona y sub-transitoria de eje q, y una constante de tiempo sub-transitoria. Los parámetros básicos de eje q son obtenidos por las siguientes relaciones: Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-17 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Lq L Lq L Laq Tq 0 L Laq rkq Laq Lkq Laq (III.61) Lkq La referencia [4] presenta expresiones generales relacionando los parámetros básicos de la máquina con los datos usuales, tanto para el caso en que Lmd Lad cuanto para aproximaciones más adecuadas de las inductancias operacionales. IV.4.3. Modelo de la Máquina Síncrona para Estudios de Estabilidad. En los estudios de estabilidad, algunas simplificaciones pueden ser aplicadas en las ecuaciones de la máquina síncrona: Despreciar los términos relativos al efecto de transformador; Despreciar los efectos de variación de la velocidad. d q d d Los términos relativos al efecto de transformador, y dt , están relacionados a los dt transitorios de los enrollamientos del estator. Estos transitorios son de naturaleza electromagnéticas y tienen, en general, constantes de tiempo muy menores a aquellas asociadas a los transitorios electromecánicos. Considerándose estos transitorios como muy rápidos, se puede considerar que el estator está operando en régimen permanente senoidal y utilizar ecuaciones algebraicas (faso riales) para representar la red eléctrica que interconecta las máquinas sincronías. Este acarreo es una enorme simplificación, una vez que el modelamiento dinámica del sistema de transmisión acarrearía un enorme aumento en la orden del sistema de ecuaciones diferenciales (ecuaciones de estado), impracticable en el análisis de la estabilidad del sistemas de gran porte. La velocidad síncrona del sistema es utilizada como base en sistema por unidad. El resultado de esto es que las velocidades de las máquinas sincronías estarán próximas a 1 p.u., permitiendo que las ecuaciones de tensión de los enrollamientos del estator (dq) se reduzcan a vd rid q (III.62) vq riq d y haciendo que los torques se tornen, numéricamente, iguales a las potencias (P = T). IV.5 Modelo Alternativo para la Máquina Síncrona un modelo dinámico para la máquina síncrona, basado en los parámetros de placa de la máquina, puede ser desarrollado utilizando las siguientes aproximaciones [8]: (a) La velocidad del rotor no se desvía mucho del valor nominal de 1,0 p.u. u puede ser considerada constante; (b) Todas las inductancias son independientes de la corriente, i. y., los efectos de la saturación magnética fueron desconsiderados; (c) Las inductancias de los enrollamientos de las máquina pueden ser aproximadas por una constante sumada como funciones harmónicas de la posición del rotor; (d) Enrollamientos distribuidos pueden ser representados por enrollamientos concentrados equivalentes; Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-18 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 (e) La máquina síncrona puede ser representada por una fuente de tensión detrás de una reactancia; (f) No hay pérdidas por histéresis en el hierro y los efectos de las corrientes parásitas son representados a través de un enrollamiento equivalente de rotor; (g) Sólo hay reactancia de dispersión en los enrollamientos del estator. Régimen Permanente La Figura 24 presenta el diagrama fasorial de una máquina síncrona en régimen permanente. El flujo f es proporcional a la corriente de campo If y, en régimen permanente, a la tensión aplicada en el enrollamiento de campo. Este flujo está alineado con el eje directo de la máquina. La tensión terminal en vacío de la máquina síncrona Ef es proporcional al flujo f y se encuentra 90 adelantada en relación a este, estando, por lo tanto, alineada con el eje en cuadratura. Cuando una carga es aplicada a la máquina, la circulación de corrientes en los enrollamientos del estator produce un flujo magnético , en fase con la corriente, que se compone fasorialmente con el flujo de campo para producir el flujo equivalente de entrehierro e. La tensión interna de la máquina síncrona VI es proporcional al flujo del entrehierro, desfasada 90 . La tensión terminal V es obtenida a partir de VI considerándose la caída de tensión en resistencia y en la reactancia de dispersión del enrollamiento del estator. Se puede probar, aún, que la diferencia entre Ef y VI está en fase con j Xl.i y es proporcional a la corriente. De esta forma, esta diferencia puede ser considerada como la caída de tensión en una reactancia de armadura Xa. La suma entre Xa y Xl es la reactancia síncrona de la máquina. eixo d f e Ef eixo q I.X a I Vl V I.R a I.X l (a). Máquina de Polos Lisos Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-19 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 eixo d q f d e Iq Id Ef I.X a I eixo q Iq.Xaq Vl V Id.Xad I.X l I.R a (b). Máquina de Polos Salientes Figura 24. Diagrama Fasorial de la Máquina Síncrona en Régimen Permanente Para el caso de la máquina de polos salientes, el diagrama fasorial es un poco más complicado. Las variables pueden ser descompuestas en términos de sus componentes de eje d y eje q, conforme mostrado para la corriente. Debido a la diferencia entre los caminos magnéticos en estos dos ejes, la corriente Id producirá un flujo magnético d proporcional y en fase con la corriente, así como la corriente Iq producirá un flujo magnético q. Pero, la proporcionalidad entre el flujo y la corriente depende, en este caso, de la dirección considerada, siendo más fácil producir el flujo en la dirección del eje d que en la dirección del eje q. De esta forma, el flujo producido por la corriente de carga no es proporcional a esta corriente, ni tampoco se encuentra en fase con ella. La tensión interna equivalente de la máquina es proporcional alo flujo magnético del entrehierro e desfasada 90 en relación a este. Nuevamente, la tensión terminal será obtenida levándose en cuenta la caída de tensión sobre la resistencia y la reactancia de dispersión del estator. La reactancia de la armadura, en este caso, puede ser descompuesta en términos de los ejes d y q, resultando en Xad y Xaq. Las reactancias sincronías son la suma de estas reactancias de la armadura con la reactancia de dispersión. Las siguientes relaciones son válidas para representar a máquina síncrona en régimen permanente: X d X X ad Xq X X aq E fd Vq Ra Iq Vd Ra I d X d Id (III.63) X q Iq Régimen transitorio Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-20 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Para cambios más rápidas en las condiciones externas de la máquina síncrona, las relaciones de régimen permanente no son tan válidas. Los enlaces de flujo no pueden variar instantáneamente y, consecuentemente, se torna necesario el uso de ecuaciones diferenciales que describan esta variación. Esto es hecho definiendo las tensiones transitorias detrás de la reactancia transitoria tal que Eq Vq Ra Iq X d Id (III.64) Ed Vd Ra Id X q Iq A partir de esta definición, es posible llegar a las siguientes ecuaciones diferenciales: dEq 1 E fd X d X d I d Eq dt Td 0 (III.65) dEd 1 X q X q I d Ed dt Tq 0 b g d i La Figura 25 presenta el diagrama fasorial correspondiente a la operación de la máquina en el estado transitorio. eixo d Ei Iq eixo q Ef Id I Iq.Xq E' V Iq.X' q Id.X' d I.R a Id.Xd Figura 25. Diagrama Fasorial de la Máquina Síncrona en Régimen transitorio Régimen Sub-transitorio Cuando es necesario, debido a la presencia de enrollamientos amortiguadores u otros efectos similares, se puede considerar los efectos sub-transitorios de la máquina síncrona de manera similar a aquella utilizada para el régimen transitorio. Las ecuaciones resultantes son dadas por Eq Vq Ra Iq X d I d Ed Vd dEq dt dEd dt Ra Iq 1 Eq Td 0 1 Ed Tq 0 X q Iq bX dX d q g X iI X d Id q q Eq (III.66) Ed IV.6 Ecuaciones Mecánicas Para el análisis de la estabilidad de un sistema de potencia, el correcto modelamiento del movimiento del rotor es de fundamental importancia. El modelo más simples empleado en este caso es basado en la Ley de Newton para el movimiento circular de un cuerpo rígido, cuyo resultado, ya en términos de valores por unidad, es dado por Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-21 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 b g d 1 Tm Te K D dt 2 H (III.67) d s 1 dt donde Tm = torque mecánico producido por la turbina; Te = torque eléctrico de la máquina, dado por la ecuación (III.54); KD= constante de amortización; H = constante de inercia de la máquina en MW.s/MVA; s = velocidad síncrona del sistema (2 f); La velocidad es, en verdad, el desvio de velocidad de la máquina en relación a la velocidad síncrona. La constante de amortiguamiento es una forma simples de representar el amortiguamiento que existe en el sistema real, debido a diversos factores, en las ecuaciones mecánicas. El gran problema está en la correcta determinación de su valor, para cada máquina del sistema. b g El torque mecánico Tm es el torque de salida de la turbina y, en verdad, puede ser ajustado a partir del sistema de control de velocidad de la máquina. Pero, debido a las inercias envueltas en el problema, las constantes de tiempo típicas de los reguladores de velocidad son de cerca de algunos segundos. De esta forma, una aproximación usualmente empleada en estudios de estabilidad transitoria es considerar el torque mecánico constante e igual al valor del régimen permanente durante todo o período en estudio. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IV-22 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 V. MODELOS DE REGULADORES DE TENSIÓN La función básica de un sistema de excitación es proveer corriente continua para el enrollamiento de campo de la máquina síncrona. Además de eso, el sistema de excitación desempeña funciones de control de protección esenciales para el desempeño satisfactorio de un sistema de potencia, a través del control de la tensión aplicada al enrollamiento de campo y, por lo tanto, de la propia corriente de campo. Las funciones de control incluyen el control de la tensión terminal y de la generación de potencia reactiva, además de funciones propias para el aumento de la estabilidad del sistema. Las funciones de protección están relacionadas a los límites de capacidad de la máquina síncrona y del propio sistema de excitación, que no pueden ser excedidos. Los criterios de desempeño de un sistema de excitación son determinados a partir de la máquina síncrona al cual él estará conectado, así como con relación al propio sistema de potencia como un todo. El requisito básico de un sistema de excitación es suplir y ajustar automáticamente la corriente de campo del generador síncrono de forma de mantener la tensión terminal en un valor de ajuste, para variaciones en la generación de salida, dentro de la capacidad nominal de la máquina. Además de esto, el sistema de excitación debe ser capaz de responder la perturbaciones transitorias, actuando en el campo de manera consistente con la capacidad instantánea y de curta duración de la máquina. Esta actuación será limitada por diversos factores como, por ejemplo, sobre-calentamientos por exceso de corriente de campo y/o estator o por exceso de flujo magnético y falla de aislamiento debido a la sobre tensión en el enrollamiento de campo. El sistema de excitación debe, aún, contribuir para el control de tensión y el aumento de la estabilidad del sistema de potencia. Debe responder rápidamente las perturbaciones para aumentar la estabilidad transitoria (proveer torque sincronizante) y debe ser capaz de modular la corriente de campo para aumentar la estabilidad a pequeñas perturbaciones (proveer torque de amortiguamiento). La Figura 26 presenta los principales bloques funcionales de un sistema de excitación de un generador síncrono de gran porte. La excitatriz es el equipamiento responsable por proveer la potencia (CC) necesaria para alimentar el enrollamiento de campo del generador. El regulador procesa y amplifica señales de control para la forma y los niveles necesarios para el control de la excitatriz. Debe incluir la regulación y las funciones de estabilización del sistema de excitación. El transductor de tensión incorpora las funciones de medición, rectificación y filtrado de la señal de tensión terminal (trifásica alterna). Puede, aún, incluir la compensación de carga para permitir el control de tensiones remotas. La señal adicional estabilizador y proyectado exclusivamente para el amortiguamiento de oscilaciones electromecánicas, poseyendo un bloque wash-out en su salida para limitar su actuación en bajas frecuencias. Los circuitos limitadores y de protección envuelven diversas funciones visando asegurar la operación del sistema de excitación y de la máquina síncrona dentro de sus capacidades nominales. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência V-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 LIMITADORES E CIRCUITOS DE PROTEÇÃO TRANSDUTOR DE TENSÃO E COMPENSADOR DE CARGA Vref REGULADOR EXCITATRIZ Sistema de Potência GERADOR SINAL ADICIONAL ESTABILIZADOR (PSS) Figura 26. Diagrama de Bloques de las Funciones Básicas de un Sistema de Excitación Los sistemas de excitación evolucionaron significativamente a lo largo de los años, correspondiendo a un aumento sistemático de su influencia en el desempeño dinámico de un sistema de potencia. Los sistemas de excitación pueden ser clasificados, de manera general, según la fuente de potencia utilizada: Sistemas de excitación CC Sistemas de excitación CA Sistemas de excitación estáticos La Figura 27 presenta un diagrama esquemático simplificado de un sistema de excitación CC. Una máquina CC especial, conocida como amplidina es utilizada como regulador de tensión, controlando la corriente de campo de un generador CC, que suministra corriente para el campo del generador a través de anillos colectores. am plidyne excitatriz CC cam po arm adura gerador CA cam po arm adura TC anel reostato de campo : TP regulador de tensão Figura 27. Sistema de Excitación CC Este tipo de sistema de excitación fue muy empleado hasta la década de los 60, cuando los sistemas de excitación CA pasaran a dominar el escenario. La presencia del anillo colector representa una gran dificultad técnica del punto de vista de mantenimiento y confiabilidad. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência V-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 La Figura 28 presenta un diagrama simplificado de un sistema de excitación CA. La tensión (y corriente) CC del campo del generador es suministrada a partir de un rectificador en la salida de la excitatriz. Los primeros sistemas de excitación CA utilizaban un rectificador estacionario y, por lo tanto, la corriente de campo debe ser suministrada al generador a través de anillos colectores. excitatriz CA cam po arm adura cam po gerador CA arm adura TC : anel regulador CC regulador CA TP referência CC referência CA Figura 28. Sistema de Excitación CA La Figura 29 presenta el diagrama de un sistema de excitación CA sin anillos (brushless) dotado de excitatriz piloto. Este sistema de excitación utiliza una excitatriz CA montada en el eje del rotor, cuyo enrollamiento de campo se encuentra montado en el estator. La excitatriz piloto tiene la función de suministrar corriente de campo CC para la excitatriz CA y es, en general, un generador CC con imanes permanentes, cuyo campo se encuentra en el rotor y la armadura en el estator. excitatriz piloto arm adura excitatriz CA arm adura cam po gerador CA arm adura cam po N TC S : cam po TP CA trifásica regulador CA referência CA Figura 29. Sistema de Excitación Brushless con Excitatriz Piloto Los sistemas de excitación estáticos, como el propio nombre ya dice, utiliza sólo equipamientos electrónicos para producir la tensión (y la corriente) CC que alimenta el campo del generador. Se utiliza, en general, un rectificador controlado que alimenta el campo a través de anillos colectores. En su forma más simples, la tensión trifásica del generador (o de una barra auxiliar) es rectificada para alimentar el campo. Este arreglo, con todo, depende del nivel de tensión CA disponible para rectificación, sufriendo serias limitaciones durante defectos en que esta tensión puede quedar muy baja. Este efecto puede ser parcialmente compensado utilizándose Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência V-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 una fuente de tensión para el rectificador que sea proporcional a la tensión y a la corriente terminal del generador, garantizándose, así, la alimentación del campo durante los defectos. El correcto modelamiento dinámica de los sistemas de excitación es una de las principales tareas asociadas a los estudios de estabilidad transitoria. La enorme diversidad de modelos y de funciones desempeñadas por los sistemas de excitación tornan esta tarea bastante artesanal y dependiente de informaciones de los fabricantes y/o ensayos de campo. Para situaciones en que el sistema de excitación específico no es conocido, como por ejemplo en los estudios de Planificación, cuando estos aún no fueron especificados, es común utilizar modelos genéricos para representar los sistemas de excitación. La Figura 30 presenta la estructura general de un modelo completo del sistema de excitación. Este modelo mantiene la identidad de cada componente del sistema de excitación y tiene la ventaja de tornarse más fácil la determinación de parámetros, que mantienen su significado físico original. Pero, este modelo es considerado muy detallado para estudios de estabilidad, especialmente aquellos asociados con el desempeño del sistema de potencia como un todo. Modelos reducidos son obtenidos, entonces, procurando mantener las características dinámicas de la respuesta del sistema de excitación en la franja de frecuencias de 0 Hz a cerca de 3 Hz, asociada a los transitorios electromecánicos. Vref estágios amplificadores |V| + + + + - + - G1 G2 H1 laços internos de estabilização excitatriz G3 - Vpss H2 laço de estabilização principal H3 Figura 30. Estructura de un Modelo de Sistema de Excitación La mayor parte de los sistemas de excitación del sistema brasileño se encuentra modelado y disponible para uso en los programas de análisis de la estabilidad, con los modelos y sus parámetros habiendo sido objeto de grandes estudios y debates. En la ausencia de un modelo definido, el IEEE posee trabajos publicados con modelos estándar sugeridos para diversos tipos de sistemas de excitación [12, 13], que pueden ser utilizados o adaptados para las necesidades del estudio a ser realizado. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência V-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 VI. ACOPLAMENTO DE MODELOS VI.1 Estructura del Modelo Completo del Sistema de Potencia para Análisis de Estabilidad Transitoria El análisis de la estabilidad transitoria de sistemas de potencia envuelve la solución de la respuesta dinámica no lineal para una gran perturbación en el sistema, como por ejemplo, un corto-circuito en el sistema de transmisión seguido del aislamiento del elemento en corto por la protección. La Figura 31 muestra la estructura general del modelo del sistema de potencia usado en el análisis de la estabilidad transitoria. En esta estructura, grandes discontinuidades debidas, principalmente por fallas y desconexciones, adicionadas a pequeñas discontinuidades debidas, por ejemplo por límites en las variables, están presentes en el modelo del sistema. Otras informaciones relevantes además de las relacionadas con la estabilidad son, las tensiones de las barras, los flujos en las líneas y el desempeño del sistema de protección. Equações elétricas do es tator e transform ação de coordenadas Er,Ei Ir,I i demais geradores Equações elétricas as sociadas aos circuitos do rotor Equações do Sistem a de Excitação Equações mecânicas do movimento do rotor Equações do Regulador de Velocidade Equações de um a única m áquina nos seus eixos d-q Equações da Rede Elétrica (m atriz Ybarra) incluíndo cargas estáticas m otores e cargas dinâm icas outros equipamentos dinâm icos Equações da rede elétrica na referência com um (real-im aginário) Figura 31. Estructura Completa del Modelo para el Análisis de Estabilidad Transitoria Conforme mostrado en la Figura 31, la representación global del sistema de potencia incluye modelos para los siguientes componentes: Generadores síncronos y sus sistemas de excitación y motriz. Red de transmisión incluyendo las cargas estáticas. Cargas de motores síncronos y de inducción. Otros equipamientos, como por ejemplo, los sistemas HVDC y FACTS. El modelo usado en la representación de cada componente debe ser apropiado para el análisis de la estabilidad transitoria, y las ecuaciones del sistema deben ser organizadas de forma apropiada para los métodos numéricos. El modelo completo del sistema consiste en un gran sistema de ecuaciones diferenciales ordinarias junto con un gran sistema de ecuaciones algébricas. El modelo completo del Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VI-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 sistema consiste en un gran sistema de ecuaciones diferenciales ordinarias junto con un gran sistema de ecuaciones algébricas. VI.2 Representación de la Máquina Síncrona y de su Sistema de Excitación El modelo de la máquina síncrona en los estudios de estabilidad transitoria, es representado por ecuaciones diferenciales derivadas del modelo de Park (ejes d-q). La orden de este modelo depende del grado de complejidad en la representación de los efectos transitorios y subtransitorios que ocurren en los circuitos del rotor de la máquina síncrona. La dinámica del estator es, en general, despreciada en los estudios de estabilidad transitoria, transformando así, sus ecuaciones diferenciales en ecuaciones algébricas. Completando el modelo de la máquina síncrona, se tiene la ecuación diferencial que modela el movimiento del rotor (ecuación de oscilación). Los varios modelos de sistemas de excitación descritos en el capítulo anterior, son sólo una muestra de la infinidad de modelos existentes en el mercado. Estos básicamente son representados por ganancias, constantes de tiempo, limitadores, bloques de saturación y señales estabilizantes. VI.3 Representación del Sistema de Transmisión y de las Cargas El sistema de transmisión, así como el estator de la máquina síncrona, es representado por un modelo algebraico, esto es, el transitorio de la red comparado con transitorio electromecánico es mucho más rápido. Este hecho nos lleva a despreciar la dinámica de la red. En los análisis en condiciones equilibradas, basta representar el circuito trifásico por el equivalente monofásico. En condiciones desequilibradas, el análisis es hecha llevando en cuenta los componentes simétricos. En situaciones especiales, donde se requiere la representación dinámica de la red y del estator de la máquina síncrona, los programas transitorios electromagnéticos (tipo EMTP) deben ser usados. La forma más conveniente de representar la red, es en términos de la matriz admitancia nodal. Las cargas dinámicas son representadas de la misma forma que los motores síncronos y de inducción. Las cargas estáticas son representadas como parte de las ecuaciones de la red. Las cargas con características de impedancia constante son as más simples de ser tratadas, siendo incluidas en la matriz admitancia nodal. Cargas no lineales son modeladas como funciones exponenciales o polinómicas de la magnitud de la tensión y dr la frecuencia. De esta forma, la carga estática no lineal es tratada como una inyección de corriente apropiada a la ecuación de la red. El valor de la corriente inyectada en el nudo es dada por PL jQL IL (V.1) VL* donde VL* es el conjugado de la tensión en la barra de carga, y PL y QL son las fracciones de las cargas activa y reactivas que varían como funciones no lineales de VL y del desvío de la frecuencia. Por convención, QL es positivo para cargas inductivas. La representación general de la red y de la carga consiste en una ecuación matricial de admitancia nodal de la forma (V.2) I YV y cuya estructura es similar a la matriz usada en los estudios del flujo de potencia. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VI-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 La matriz admitancia nodal Y es simétrica, excepto por las asimetrías introducidas por los transformadores desfasadores. Dentro del dominio del tiempo de las simulaciones de estabilidad transitoria, los taps de los transformadores y las defasajes angulares no cambian. Entonces, los elementos de la matriz son constantes a menos de los cambios en la configuración de la red. Los efectos de los generadores, cargas estáticas no lineales, cargas dinámicas, así como otros elementos como HVDC y FACTS son reflejados como condiciones de frontera representadas en relaciones adicionales entre V y I en los respectivos. En contraste al análisis de los estudios de flujo de potencia, el control de flujo en LTs, límites en la generación de potencia reactiva y balance de las pérdidas por la barra de referencia, no necesitan ser consideradas en los estudios de estabilidad transitoria. Para simular una falta en el sistema, basta cambiar, de forma apropiada, el valor de la admitancia propia de la barra con el defecto. VI.4 Ecuación Completa del Sistema Las ecuaciones para cada generador y para cada equipamiento dinámico pueden ser expresada de la siguiente forma: (V.3) x d f d x d , Vd b g g bx , V g (V.4) Id d d d donde xd = vector de estado de cada equipamiento Id = inyección de corriente del equipamiento para la red Vd = tensión de la barra Las ecuaciones generales del sistema, incluyendo las ecuaciones diferenciales (V.3) para todos los equipamientos y la combinación de las ecuaciones algébricas de los equipamientos (V.4) y la red (V.2) son expresadas en la siguiente forma general correspondiendo a un conjunto de ecuaciones diferenciales ordinarias de primer orden: (V.5) x f x, V y el conjunto de ecuaciones algébricas (V.6) I x, V YV con un conjunto de condiciones iniciales conocidas (x0, V0), donde x = vector de estado del sistema V = vector de las tensiones nodales I = vector de las inyecciones de corriente Varios métodos ya fueron propuestos en la literatura para la solución de esas ecuaciones, dependiendo de los métodos numéricos empleados y de los detalles del modelamiento. Esos variados métodos de solución de las Ecuaciones (V.5) y (V.6) son caracterizados por los siguientes factores: modo de interfase entre las ecuaciones diferenciales (V.5) y las ecuaciones algebraicas (V.6). Un método llamado particionado y otro llamado simultáneo pueden ser usados. método de integración utilizado, esto es, el método implícito o método explícito. método usado en la solución de las ecuaciones algébricas. Los métodos que pueden ser utilizados son: (i) el método de Gauss-Seidel basado en la formulación de la matriz de admitancia nodal; (ii) un método de solución directa usando factorización triangular, y (iii) un método de solución iterativa que usa en el método de Newton-Raphson. b g b g Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VI-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Todos los métodos descritos arriba ya fueron utilizados con éxito en programas de estabilidad transitoria comerciales de gran porte. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VI-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 VII. SIMULACIÓN DE SISTEMAS Los componentes envueltos en los sistemas de control son ampliamente diferentes. Ellos pueden ser electromecánicos, hidráulicos, neumáticos, electrónicos, etc. En ingeniería de control, en vez de tratar de los dispositivos de hardware, se sustituyen tales dispositivos o componentes por sus modelos matemáticos. Obtener un modelo matemático razonablemente preciso de un componente físico es uno de los problemas más importantes en ingeniería de control. Note que, para ser útil, un modelo no debe ser muy complicado tampoco muy simplificado. Un modelo matemático debe representar los aspectos esenciales de un componente físico. Las previsiones del comportamiento del sistema basadas en el modelo matemático deben ser razonablemente precisas. Note también que los sistemas que parecen diferentes pueden ser representados por el mismo modelo matemático. El uso de tales modelos matemáticos posibilita a los ingenieros de control desarrollar una teoría unificada. En ingeniería de control son comúnmente usadas las ecuaciones diferenciales lineales invariantes en el tiempo, funciones de transferencia y ecuaciones con variables de estado para modelos matemáticos de sistemas lineales invariantes en el tiempo y continuos. Aunque las relaciones de entrada-salida de muchos componentes sean no-lineales, normalmente se linealizan tales relaciones en torno de puntos de operación y se analiza el desempeño del sistema para pequeñas variaciones en torno del punto de linealización. Ciertamente, estos modelos linealizados son más fáciles de tratar analíticamente y computacionalmente. Para estudiar un dato del sistema, el mínimo necesario sería la capacidad de prever la salida (respuesta) de este sistema para cualquier entrada (excitación) deseada. Una primera idea sería aplicar, en el sistema bajo estudio, todas las entradas posibles y, después, analizar las respuestas obtenidas. Este método “experimental” posee algunas deficiencias fundamentales: es prácticamente imposible saber, a priori, todas las entradas posibles que se desearía analizar; puede ser arriesgado (para personas o para el propio sistema) la aplicación de entradas sin que se tenga idea de la respuesta esperada; (a usted le gustaría estar en un avión siendo sometido a “ensayos” ?); puede no ser práctico aplicar la(s) entrada(s) y registrar, simultáneamente, la(s) salida(s) (por ejemplo, entrada = aumento de carga en el área Río y salida = generación de la UHE Itaipu); puede ser muy difícil, o incluso imposible, analizar las respuestas obtenidas y extraer conclusiones. Para evitar estos problemas, los ingenieros buscan modelos que representen el comportamiento del sistema y que puedan ser utilizados en la simulación de este sistema en las más diversas situaciones que puedan ser imaginadas. Un buen modelo permite estudiar un sistema real, posibilitando la obtención de la respuesta (salida) de este sistema, para cualquier entrada deseada, a través de simulación. La simulación puede ser analógica o digital: La simulación analógica es posible a través del uso de modelos reducidos y/o equivalentes del sistema real que son sometidos, entonces, a las mismas señales (entradas) que serían aplicados al sistema real. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 La simulación digital consiste en la formulación de un modelo matemático para el sistema a ser analizado y su simulación a través de técnicas numéricas basadas en computadores. El problema principal de esta abordaje puede ser resumido en la siguiente pregunta: que es y como puede ser obtenido un buen modelo ? Como el modelo será usado para simular el desempeño de un sistema real, dos aspectos componen este problema: las ecuaciones matemáticas utilizadas para representar el sistema deben incluir todos los fenómenos relevantes para el análisis a ser efectuada; la obtención de una solución para estas ecuaciones tiene que ser asequible y producir resultados precisos y consistentes con el análisis. Como, en general, los modelos dinámicos están basados en ecuaciones diferenciales, la solución numérica de esta clase de problemas tiene que ser examinada con alguna atención. VII.1 Integración Numérica Para el análisis de la estabilidad transitoria de sistemas de potencia, se debe resolver un conjunto de ecuaciones diferenciales no-lineales de 1a orden, con condiciones iniciales conocidas, de la forma (VI.1) x f x, r, t donde x = vector de variables de estado; r = vector de variables algebraicas; t = tiempo. Las variables algebraicas están relacionadas la restricciones algébricas de la forma b g b g 0 g x, r,t que deben ser satisfechas a cada instante de tiempo. (VI.2) En general, ecuaciones diferenciales no-lineales sólo admiten solución numérica, i. e., calculada paso a paso. Diversos algoritmos de integración numérica son conocidos y la opción del “mejor” depende grandemente del problema. Así siendo, algunas características inherentes a los métodos de integración deben ser analizadas para llegar a una conclusión. Los principales métodos de integración numérica pueden ser interpretados como aproximaciones basadas en el truncamiento de la expresión de la solución del problema en términos de su serie de Taylor: 2 3 dx t d 2x t t d 3x t t x t0 t x t0 t (VI.3) dt t t dt 2 t t 2 ! dt 3 t t 3! b g bg bg 0 bg b g bg b g 0 0 VII.1.1. Presición Esta característica dada, principalmente, por dos factores: Error de redondeo; Error de truncamiento. Los errores de redondeos están relacionados a la representación de los números en un computador (aritmética finita) y pueden ser minimizados utilizando doble precisión y/u otros recursos inherentes al computador siendo utilizado para resolver el problema. ya los errores de truncamiento son debidos a la aproximación de la solución real del problema utilizada por el método de integración escogido. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 El error de truncamiento puede ser analizado a partir de la serie de Taylor de la función, mostrada en la ecuación (VI.3), y será proporcional a p 1 t (VI.4) donde t es el paso de integración escogido y p es el orden de la serie de Taylor utilizada por el método de integración como aproximación de la solución. La solución verdadera del problema, en un instante dado de tempo tn, será dada, por lo tanto, por y tn yn O t p 1 (VI.5) n b g bg c h donde yn es la aproximación calculada por el método de integración, O grandeza de la presición del método y proceso. VII.1.2. Estabilidad n c tp 1 h es la orden de representa los demás errores que pueden surgir en el Dos tipos de inestabilidad pueden ocurrir en la solución de ecuaciones diferenciales ordinarias: Inestabilidad inherente; y Inestabilidad inducida. La instabilidad inherente surge cuando errores numéricos son amplificados, a cada paso de la solución, hasta dominar completamente el cálculo y hacer el método divergencia de la solución real. Ya la inestabilidad inducida está relacionada con el método de integración utilizado o, de manera más precisa, con la discretización resultante de la aplicación del método, que depende, también, del paso de integración escogido. Se puede mostrar que los métodos de integración corresponden a resolver una ecuación algebraica de la forma dyn 1 dyn dy (VI.6) k nk1 0 0 yn 1 1 yn 2 yn 1 k yn k 1 0 1 dt dt dt donde i y i son constantes y se desea determinar yn+1, conociendo los valores anteriores de yi (i < n+1). Esta es una ecuación discreta, lineal, y será estable si todas las raíces de su polinomio característico tuviera módulo menor que 1. El mayor problema está en el hecho que cuánto mayor es la presición del método, menor será su estabilidad. Esto es más grave para los métodos en que el o paso de integración es crítico para la solución, en especial los métodos de Runge-Kutta. Estos métodos son estables sólo para algunos valores de t y son dichos condicionalmente estables. Métodos con margen de estabilidad infinita (independiente de t) son llamados métodos Losestables y los métodos de Euler Reverso y Trapezoidal están en esta categoría. VII.1.3. Rigidez Un sistema de ecuaciones diferenciales es dicho rígido (“stiff”) cuando la razón entre la mayor y la menor constantes de tiempo del problema sea muyo mayor que 1. Métodos de integración tradicionales tienen su intervalo de integración definido por la menor constante de tiempo y el tiempo final de la simulación es definido por la mayor constante de tiempo. De esta forma, un gran número de puntos deberán ser determinados, aumentando sobremanera el tiempo de computación. Además de eso, si el método de integración no fuera La-estable, puede haber problemas de inestabilidad numérica. Curso LIMA, PERÚ – 2003 VII-3 Estabilidade Eletromecânica de Sistemas de Potência UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 VII.2 Métodos de Integración Numérica Los métodos de integración numérica, como fue visto en la sección anterior, representan una discretización de la solución, de forma que la ecuación diferencial original (continua) es aproximada por una ecuación de diferencias (discreta) y apenas algunos valores (correspondientes a determinados instantes de tiempo) son calculados, que corresponderán a la solución aproximada obtenida. La Figura 32 ilustra este efecto, en que una función es aproximada a partir de valores discretos. 2.5 2 1.5 1 x(t) 0.5 0 -0.5 -1 -1.5 -2 -2.5 0 0.2 0.4 0.6 0.8 1 t Figura 32. Discretización de una Función Continua Para ejemplificar la aplicación de los diversos métodos de integración numérica, será utilizado el siguiente sistema lineal de las ecuaciones diferenciales: x1 x2 x1 0 x10 (VI.7) x2 a1x1 a2 x2 x2 0 x20 cuya solución analítica es de la forma x20 1t x20 2 x10 1 x10 x1 t e e 2t 2 1 2 1 (VI.8) x x x 2 10 20 20 1 x10 1t 2t x2 t e e 1 2 RS T R| b g S| |T b g bg bg 2 1 2 1 donde a22 4a1 (VI.9) 1, 2 2 son las raíces del polinomio característico de la ecuación diferencial de 2a orden asociada a la ecuación (VI.7) o, equivalentemente, son los polos de la función de transferencia de este sistema. VII.2.1. Método de Euler a2 Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 El método de Euler es el más simple de los métodos de integración numérica y puede ser visualizado en la Figura 33. Utilizando el valor de la derivada de la función en el instante de tiempo t = t0, se puede escribir que dx t x t0 t x t0 t (VI.10) dt t t g b g bg b 0 0.7 0.6 0.5 x(t) 0.4 0.3 0.2 x'(t). t t 0.1 0 -0.1 0 0.2 0.4 0.6 0.8 1 1.2 t Figura 33. Interpretación Gráfica del Método de Euler Este método corresponde a la aplicación de la serie de Taylor, mostrada en la ecuación (VI.3), aproximada sólo por los dos primeros términos. De esta forma, la presición de este método es del orden O t 2 . c h La discretización del sistema de ecuaciones, dada por el método de Euler, es equivalente a la ecuación (VI.6) haciendo 1 1 0 t 0 1 0 1 (VI.11) 0 0 2 3 k 2 3 k la aplicación del método de Euler para la solución del sistema dado por la ecuación (VI.7) resulta en R| b x g b x g FG dx H dt |S ||b x g b x g FG dx H dt T 1 1 n 1 1 n 2 2 n 1 2 n n IJ K IJ K t (VI.12) t n El método de Euler puede ser implementado de forma explícita o implícita. En su forma explícita, el valor de las derivadas mostradas en la ecuación (VI.12) son explicitamente calculadas a cada paso del algoritmo. ya en el caso de haber expresiones analíticas para las derivadas, estas pueden ser sustituidas, resultando un sistema de ecuaciones que no dependen explicitamente de las derivadas. Para el ejemplo dado, la ecuación (VI.7) suministra expresiones analíticas para las derivadas, resultando en el siguiente sistema de ecuaciones: Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 R| b x g b x g b x g t S|b x g b x g a b x g T 1 n 1 1 n 2 n 2 n 1 2 n 1 1 n b g a2 x 2 LMb x g OP L Nb x g Q MN 1 n 1 t n 2 n 1 1 t a1 t 1 a2 t OPLMb x g OP (VI.13) QNb x g Q 1 n 2 n La formulación implícita permite reducir el error numérico que puede haber en la determinación de las derivadas de las funciones, que son sustituidas por expresiones analíticas equivalentes. VII.2.2. Método de Euler Reverso El método de Euler reverso (“backward Euler”) modifica el método de Euler original, utilizando el valor de la derivada en el instante de tiempo t = t0+ t en la ecuación (VI.10): dx t x t0 t x t0 t (VI.14) dt t t t g b g bg b 0 la discretización resultante de la aplicación de este método también puede ser expresada por la ecuación (VI.6), donde, en este caso, 1 1 t 0 0 1 0 1 (VI.15) 0 0 2 3 k 2 3 k Este método es mas estable que el método de Euler convencional (“forward Euler”), pero su implementación requiere el cálculo del valor de la derivada en un instante de tiempo para el cual aún no se conoce el estado. La implementación explícita, en este caso, requiere una extrapolación inicial para la determinación del valor del estado en el instante t = t0+ t para permitir el cálculo de la derivada. La aplicación de este método para el sistema ejemplo de la ecuación (VI.7) resulta en R| b x g b x g FG dx H dt |S ||b x g b x g FG dx H dt T 1 1 n 1 1 n n 1 2 2 n 1 2 n IJ K IJ K t (VI.16) t n 1 Por otro lado, la implementación implícita continua siendo muy simples, debido a la sustitución de las derivadas por sus expresiones analíticas: x1 n 1 x1 n x2 n 1 t R| b g b g b g S|b x g b x g a b x g T t O Lb x g O LM 1 Na t 1 a t PQMNb x g PQ 2 n 1 2 n 1 1 n 1 1 n 1 1 2 2 n 1 b g t LM1 0OPLMb x g OP N0 1QNb x g Q a2 x2 n 1 (VI.17) 1 n 2 n VII.2.3. Método de Euler Modificado El método de Euler modificado intenta mejorar el desempeño del método convencional a través de la mejoría de la estimativa de la derivada. Para eso, la ecuación (VI.10) será modificada haciendo la derivada igual a la media entre la derivada en el instante t = t0 y el valor de la derivada calculada para una estimativa del estado en el instante t = t0+ t. Este es el más simples de los métodos de integración del tipo preditor-corrector, en que surge un paso de predicción del valor del estado en el instante t = t0+ t y este valor es utilizado para la corrección y obtención de un nuevo valor del estado en ese instante. El método, por lo tanto, puede ser descrito por los siguientes pasos: Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Paso 1: Preditor b x p t0 Paso 2: Corrector b x t0 t t g x bt g 1 L dx b g g 2 MM dt N dx t dt t0 (VI.18) dx p x t0 dt t0 t0 t OP PQ (VI.19) t Se debe notar que la ecuación (VI.18) corresponde a un paso del método de Euler convencional, mostrado en la ecuación (VI.10). Ya la ecuación (VI.19) es muy parecida con el método trapezoidal, siendo la única diferencia el cálculo aproximado (a partir de la estimativa xp) de la derivada en el instante t = t0+ t. La implementación de este método para la solución del sistema ejemplo resulta en dx1 x1 p x1 n t n 1 dt n (VI.20) dx2 x2 p x2 n t n 1 dt n y, para el paso corrector, R| d i b g |S ||d i b g T R| | bx g bx g S| ||b x g b x g T 1 n 1 1 n 2 n 1 LM MN t L dx M 2 M dt N t dx1 2 dt n dx2 dt b n 2 2 n OP PQ OP g PQ dx1 dt b n 1g p n 1 (VI.21) p Este método también puede ser implementado de forma implícita, sustituyendo las expresiones de las derivadas en las ecuaciones (VI.20) y (VI.21): x1 p x1 n x2 n t n 1 (VI.22) x2 p x2 n a1 x1 n a2 x2 n t R|d i b g b g S|d i b g b g T R| b x g b x g t b x g d x i 2 S| bT x g b x g 2t a b x g a b x g b g n 1 1 n 1 2 n 1 1 n 2 n 2 n 1 2p n 1 1 n 2 d i a1 x1 p 2 n n 1 d i a2 x 2 p (VI.23) n 1 Se puede, aún, sustituir los valores de x1p y x2p, obtenidos en las ecuaciones (VI.22), en la ecuación (VI.23), resultando en R|b x g |S ||b x g T 1 n 1 2 n 1 LM1 a t OPb x g LM t a t OPbx g N 2 Q N 2 Q LM a t a a t OPb x g LM1 a t ba 2 Q N N 2 2 1 2 1 n 2 n 2 2 1 2 1 1 n 2 g OPb g Q a1 t 2 x2 2 (VI.24) n VII.2.4. Método Trapezoidal El método trapezoidal puede ser interpretado como un refinamiento del método de Euler en que el valor de la derivada de la función en el instante t0 es aproximada por la media entre los Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-7 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 valores en los instantes t0 y t0+ t. La Figura 34 presenta las grandezas envueltas en el método trapezoidal de integración numérica. 0.7 0.6 0.5 x'(t+ t) x(t) 0.4 0.3 0.2 x'(t) 0.1 0 -0.1 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 t Figura 34. Método Trapezoidal El método trapezoidal puede ser descrito, por lo tanto, como b x t0 t L g xbt g 12 MM dxdtbt g N bg 0 t t0 dx t dt t t0 t OP PQ t (VI.25) y la discretización resultante es de la misma forma mostrada en la ecuación (VI.6), se define 0 1 1 1 0 t 2 0 2 3 k 2 3 El método trapezoidal aplicado el sistema ejemplo resulta en R| b x g b x g |S ||b x g b x g T 1 n 1 2 n 1 1 n 2 n FG H FG H t 2 1 k IJ K IJ K 1 dx1 dx1 t 2 dt n dt n 1 1 dx2 dx2 t 2 dt n dt n 1 (VI.26) 0 (VI.27) y será necesaria una extrapolación para la determinación de las derivadas en el instante de tiempo t0+ t. Pero, sustituyendo las expresiones de las derivadas (método implícito), se obtienen Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-8 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 R| 2 b x g 2 b x g b x g b x g t S| 2t 2 T t bx g t bx g a bx g a bx g a bx g a bx g 2 R| bt x g b x g 2t b x g b x g S|a x F 2 a I x F 2 a IJb x g a bx g G b b g g G J H t K H t K |T LM 2 1 OP Lb x g O LM 2 1 OP Lb x g O MM at 2 a PP MNb x g PQ MM at 2 a PP MNb x g PQ t N t Q N Q 1 n 1 1 n 2 n 2 n 1 2 n 1 1 n 1 1 1 n 1 2 n 1 1 n 2 2 n 2 n 1 2 1 1 n 2 n 1 1 2 n 1 1 n 2 (VI.28) 2 n 1 n 2 n 1 2 2 2 n 1 n 1 1 1 n 1 1 2 2 n Se puede probar que no existe método de integración La-estable con presición mayor que aquella del método trapezoidal [6, 4]. VII.2.5. Método de Runge-Kutta El método de Runge-Kutta busca una buena aproximación (lineal) para la derivada de la función en el intervalo [t0, t0+ t], una aproximación mejor que la utilizada por el método trapezoidal (media de las derivadas en los extremos del intervalo). El método de Runge-Kutta puede ser descrito por x t0 t x t0 R t0 , x t0 , t (VI.29) donde la función R es calculada a partir de la aproximación para la derivada utilizada y, para simplificar la implementación explícita del método, no depende del estado en el instante final del intervalo. Las implementaciones más usadas del método de Runge-Kutta son las de 2a y de 4a orden. La función R es calculada por 2 o 4 términos, respectivamente. Para el método de 2a orden, la expresión de R es dada por k1 k2 R xn , t 2 2 k1 f xn , tn t (VI.30) b g bg c bg h b g b g f bx k , t g k2 t t n 1 n Ya para el método de 4 orden, la expresión de R es dada por k1 2k2 2k3 k4 R xn , tn , t 6 6 6 6 k1 f xn , tn t a b k2 k3 g b g F k , t t IJ t f Gx H 2 2K F k , t t IJ t f Gx H 2 2K f bx k , t tg t 1 n n (VI.31) 2 n n k4 n 3 n Aplicando al ejemplo, el método de Runge-Kutta de 2a orden resulta en Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-9 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 R|S b x g b x g b x g t a b x g t |Tb x g b x g a b x g t a b x g 1 n 1 1 n 2 n 1 2 n 2 n 1 1 n 1 2 1 n 2 2 n b g b g a2 x2 n t 2 t a1 x2 n t 2 b g a1a2 x1 n t2 b g a22 x2 n t2 (VI.32) a mientras el método de 4 orden resulta en ecuaciones bastante complicadas, función de t4. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VII-10 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 VIII. NOCIONES DE CONTROL VIII.1 Malla Abierta x Malla Cerrada VIII.1.1. Sistema de Malla Abierta Los sistemas de malla abierta son esquematicamente representados de acuerdo con la Figura 35. Un ejemplo de estos sistemas son las máquinas de lavar ropas, pues el ciclo de una lavadora es totalmente decidido la apriori por el usuario. Debido a su simplicidad y por, en general, serán de bajos costos, este tipo de control es utilizado e aplicaciones no críticas. yref u y K P Figura 35. Sistema de Control en Malla Abierta VIII.1.2. Sistema de Malla Cerrada Como el propio nombre sugiere, estos sistemas poseen una malla de realimentación ligando la salida del sistema físico (planta) con la entrada del sistema de control. La Figura 36 muestra una representación usual de los sistemas de malla cerrada. yref e + u K y P - Figura 36. Sistema de Control en Malla Cerrada En los sistemas de malla cerrada, características de desempeño como estabilidad, longitud de banda, ganancia, sensibilidad a las perturbaciones, etc., pueden ser controladas y modificadas. La única desventaja, del punto de vista técnico, de los sistemas de malla cerrada en relación a los sistemas de malla abierta, es un problema de la estabilidad. Los sistemas de malla abierta sólo serán inestables si la planta o el controlador fueran inestables. Por hipótesis podemos suponer que los sistemas de malla abierta son siempre estables, porque si la planta fuera inestable, la estructura de control en la malla abierta no debe ser usada, y si el control fuera inestable el proyectista debe ser sustituido. Ya los sistemas de malla cerrada, pueden tornarse inestable aunque la planta y el controlador sean estables, entretanto, con un bien proyecto este problema puede ser fácilmente eliminado. VIII.2 Cuáles son los efectos de la realimentación? VIII.2.1. Cambio en la Ganancia del Sistema Como puede ser visto en la Ecuación (VII.1), la realimentación afecta el valor de la ganancia PK e malla abierta por un factor igual a 1+PK. Dependiendo de la señal de realimentación, la ganancia de la malla abierta puede aumentar o disminuir cuando la malla es cerrada. En un sistema práctico, P y K son dependientes de la frecuencia s, de esta forma el efecto de la realimentación puede hacer con que la ganancia del sistema aumente en una determinada franja de frecuencia y disminuya en una otra franja de frecuencia. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 bg bg bg bg bg bg Y s K s Ps Yref s 1 K s P s VIII.2.2. Efecto sobre la Estabilidad (VII.1) De una manera simple, un sistema es dicho inestable si su salida crece indefinidamente con el pasar del tiempo. Para analizar el efecto de la realimentación sobre la estabilidad, basta mirar nuevamente para la Ecuación (VII.1). Si PK=-1, la salida del sistema será infinita lo mismo para una entrada finita. De allí el cuidado que se debe tener con la realimentación de señales, pues un sistema que originalmente sea estable puede tornarse inestable con una realimentación indebida. VIII.2.3. Rechazo de Ruidos y Perturbaciones Todos los sistemas físicos son sujetos a señales externos, como ruidos y perturbaciones del punto de operación. El efecto de la realimentación sobre estas señales externos dependen mucho por donde la señal es aplicado al sistema. Sin embargo, en muchas situaciones el efecto de la realimentación es la de reducir el efecto de los ruidos y de las perturbaciones en el desempeño del sistema. VIII.2.4. Sensibilidad de la Variación en los Parámetros Los elementos de un sistema físico varían con el pasar del tiempo. Un buen sistema de control debe ser el más insensible posible a las variaciones de estos parámetros. Esta característica del sistema de control es conocida como robustez. Se debe destacar que en el objetivo de tener un control robusto, no se pierdan de vista otros objetivos de desempeño del sistema, como por ejemplo, la regulación de una señal de referencia. VIII.3 Clasificación de los Sistemas Físicos Los sistemas pueden ser clasificados en diversas categorías, de acuerdo con los más variados criterios. Presentaremos, a continuación, algunas de estas clasificaciones: VIII.3.1. Sistemas continuos x sistemas discretos Sistemas continuos son aquellos en que tanto la(s) entrada(s) cuanto la(s) salida(s) están definidas en todos los instantes de tiempo, continuamente. Los sistemas discretos, por otro lado, sólo están definidos en instantes discretos del tiempo. De una forma general, podemos definir los sistemas continuos a través de funciones continuas, mientras que los sistemas discretos serán definidos por una secuencia de puntos describiendo el instante de tiempo y el(los) valor(es) de la(s) señal(es) que lo componen. VIII.3.2. Número de entradas y de salidas Podemos clasificar los sistemas a partir del número de entradas y de salidas. En la práctica, estamos interesados en saber si el sistema tiene una o varias entradas y/o salidas, resultando en cuatro categorías: SISO (single-input-single-output), MISO (multiple-input-single-output), SIMO (single-input-multiple-output) y MIMO (multiple-input-multiple-output). VIII.3.3. Sistemas determinísticos y sistemas estocásticos Podemos analizar sistemas en que sus entradas y sus parámetros son considerados conocidos con absoluta certeza: estos sistemas son, por lo tanto, determinísticos. Sin embargo, ni siempre podemos asegurar el conocimiento de todas las variables que componen el sistema y necesitamos recurrir de alguna forma de tratamiento estadístico para describirlo, resultando un sistema estocástico. VIII.3.4. Sistemas instantáneos y sistemas dinámicos Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 En un sistema instantáneo, el valor de la(s) salida(s) es función sólo del valor de la(s) entrada(s) en el instante de tiempo (“presente”), siendo irrelevante al “pasado”. En el caso más general, el valor de la(s) salida(s) dependerá del “presente”, “pasado” y hasta (imaginemos) del “futuro”, de acuerdo con una relación dinámica. Podemos ejemplificar esto a través de la Figura 37, que representa varias entradas diferentes que podrían ser aplicadas en un sistema dado. f(t) u u 1 2 t u 1 t 3 Figura 37. Entradas que Serán Aplicadas en un Sistema En este caso en que u1(t1) = u2(t1) = u3(t1), la salida y(t1) será única, independiente de la entrada, si este fuera un sistema instantáneo. En el caso de un sistema dinámico, el valor de la salida y(t1) será diferente para cada una de las entradas aplicadas. VIII.3.5. Sistemas causales y sistemas no-causales Los sistemas causales son aquellos enque el “futuro” de la(s) entrada(s) no influyen en el valor “presente” de la(s) salida(s). Estos sistemas son también llamados sistemas noanticipativos o sistemas físicos, categoría que reúne todos los sistemas naturales. En el caso de los sistemas no-causales, el “presente” es función también del “futuro”. VIII.3.6. Sistemas relajados y sistemas no-relajados La(s) salida(s) de un sistema relajado depende únicamente y exclusivamente de la(s) entrada(s) aplicada(s). Para que esta condición se verifique, es necesario que el sistema se encuentre en “reposo” antes de la aplicación de la(s) entrada(s), i.e., el sistema debe tener condiciones iniciales nulas. Tomemos, como ejemplo, un automóvil como el sistema a ser estudiado. Consideraremos la entrada como siendo la fuerza aplicada sobre el pedal del freno y la salida como siendo la velocidad del automóvil. En este caso, fuerza echa en el pedal del freno con el carro parado o con el carro en movimiento produce resultados absolutamente diferentes. VIII.3.7. Sistemas invariantes en el tiempo y sistemas variantes en el tiempo La característica básica de un sistema invariante en el tiempo es la independencia de sus parámetros en relación al tiempo, i. e., los parámetros no varían con el tiempo. De esta forma, la respuesta de un sistema invariante en el tiempo no depende del instante en que fue aplicada la entrada, pero sólo del tiempo transcurrido desde su aplicación. Como ejemplo de sistema variante en el tiempo, recordemos que un cohete en el lanzamiento posee una masa muy mayor que cuando está en órbita. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 VIII.3.8. Sistemas lineales y sistemas no-lineales Los sistemas lineales son caracterizados por el Principio de la Superposición. Sea yi(t) a salida del sistema para una entrada ui(t). La salida y (t) para una entrada u t i ui t (combinación lineal de las entradas ui(t)) puede ser escrita como bg y bt g i i bg y bt g i i (combinación lineal de las salidas yi(t)). En un sistema no lineal el principio de la superposición no se aplica. La respuesta de un sistema no lineal depende de sus condiciones iniciales. VIII.3.9. Sistemas de parámetros concentrados y distribuidos Sistemas de parámetros concentrados pueden ser matemáticamente descritos por ecuaciones diferenciales ordinarias, i.e., no existen derivadas parciales en el modelo matemático de este sistema. En este caso, la única variable independiente es el tiempo y la simplificación introducida en el análisis se hace, muchas veces, aproximar sistemas de parámetros distribuidos en sistemas de parámetros concentrados. En el caso de sistemas de potencia, el modelo de una línea de transmisión para estudios de flujo de potencia son los parámetros concentrados. Ya en el caso de estudios de transitorios electromagnéticos, el modelo de la línea de transmisión son los parámetros distribuidos. VIII.4 Controles en Sistemas de Energía Eléctrica La dinámica y el control de sistemas de potencia es un asunto de considerable complejidad y de grande porte. En esta sección introduciremos los sistemas de control más comunes existentes en los sistemas de potencia, así como otros que aún están para tornarse en una realidad. VIII.4.1. Regulación de Tensión Como su propio nombre sugiere, el regulador de tensión es un control que busca mantener la tensión terminal del generador en un valor de referencia dado. La malla de control del regulador de tensión es cerrada a través del sistema de excitación del generador. La Figura 38 muestra un diagrama de bloques simplificado representando por una malla de tensión en un generador. Mayores detalles fueron discutidos en el Capítulo V. - Vref e RAT + Ef d |Vt| Gerador + SAE Figura 38. Malla de Control del Regulador de Tensión VIII.4.2. Amortiguamiento de Oscilaciones Electromecánicas A finales de la década de los 50 e inicio de la década de los 60 los nuevos generadores que estaban siendo instalados en el sistema Norteamericano, eran equipados con reguladores de tensión de acción continua. Esos reguladores de tensión tenían la característica de ser más rápidos que sus antepasados y pueden amplificar señales con ganancias mas elevados. A Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 medida que el porcentaje de esos nuevos reguladores instalados se fue tornando más significativa, se comenzó a observar que estos tenían un efecto de limitar la estabilidad de régimen permanente del sistema. Oscilaciones de baja frecuencia, usualmente persistían, por largos períodos. Este hecho se tornó un motivo para que la comunidad de los ingenieros de sistemas de potencia, partieran en busca de una solución del problema. El Estabilizador de Sistema de Potencia (ESP), o en el inglés, Power System Stabilizer (PSS), fue el primer sistema de control, que veía sistema de excitación, resolvió el problema de amortiguamiento de las oscilaciones electromecánicas. De allá para acá, otros equipamientos ya fueron o son utilizados en el problema del amortiguamiento de las oscilaciones electromecánicas en sistemas de potencia. Compensadores Estáticos de Reactivo (CER), modulación de control en sistemas CCAT y equipamientos FACTS son algunas de las soluciones también utilizadas en este tipo de problema. VIII.4.3. Control Carga-Frecuencia1 VIII.4.3.1. Introducción El control carga-frecuencia en un sistema de potencia es subdividido en regulación primaria y regulación secundaria. La regulación primaria tiene como objetivo mantener los desvíos de frecuencia en valores mínimos sin perdida de la estabilidad. Para eso, los reguladores de velocidad son los sistemas de control utilizados en esta tarea. La regulación automática de velocidad actúa en sentido de elevar o reducir la potencia de la unidad generadora, cuando la frecuencia se aleja de la frecuencia nominal (60 Hz en el caso brasileño). La regulación secundaria del control carga-frecuencia puede ser considerada como una regulación casi-estática comparada a la regulación primaria. La regulación secundaria es usualmente conocida como Control Automático de la Generación (CAG). Las constantes de tiempo pueden llegar, por ejemplo, a algunas órdenes de magnitud mayores que las constantes de tiempo del problema de oscilaciones electromecánicas. La regulación secundaria tiene como objetivo corregir los errores de frecuencia, por ventura dejados por la regulación primaria, cuando un nuevo punto de equilibrio es alcanzado después de una perturbación en el sistema. La regulación secundaria puede tener también como objetivo el mantenimiento del intercambio entre áreas de control en valores contrarias. VIII.4.3.2. Conceptos Básicos Todo sistema de potencia tienen una capacidad inherente de alcanzar un nuevo estado de equilibrio carga - generación. Esto se explica por el hecho de que la carga es variable con la frecuencia, y por tanto, en general, cuando la frecuencia decae también decae el valor absoluto de la carga, indicando una tendencia del propio sistema de su auto-regulador, o sea, de alcanza un nuevo estado de equilibrio. Esta propiedad es denominada de Regulación Propia del Sistema, y se expresa a través de un parámetro D, llamado de Coeficiente de Amortiguamiento. 1 Algunas figuras de esa sección fueron extraidas del libro “Operación de Sistemas de Potencia con Control Automático de Generación,” Xisto Vieira Filho, Editora Campus, 1984. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Podemos entonces verificar que después de un aumento de carga variación de frecuencia f donde: f Pd llegaremos a una Pd D (1) La Figura VIII.1 muestra una curva representativa de variación de la carga con la frecuencia. Figura VIII.1 – Curva de variación de la carga con a frecuencia En un sistema de potencia de gran porte como el brasileño, las variantes de la carga ( Pd ) pueden alcanzar valores considerables. Por otro lado, valores típicos de D para tales sistemas son relativamente bajos (D=1%, por ejemplo), mostrando que variaciones inadmisibles de frecuencia pueden ser alcanzadas. Este hecho muestra la necesidad de un control que haga balanceada la generación y la carga del sistema de potencia. En este punto podemos identificar un primer objetivo para el sistema de control, saber: mantener la frecuencia del sistema de potencia constante la mayor parte del tiempo posible. VIII.4.3.3. Regulación primaria Fue visto que cuando se verifica un desequilibrio instantáneo carga-generación se torna necesaria la actuación de un control para auxiliar en la conducción del sistema a un estado de equilibrio mas favorable. Por esta razón las unidades generadoras son dotadas de mecanismos de regulación de velocidad automática, que actúan en sentido de aumentar o disminuir la potencia generada, cuando la velocidad (o frecuencia) se aleja de velocidad de referencia. Esta regulación automática de velocidad es denominada Regulación Primaria. Podemos observar que el control de frecuencia es hecho a través de la variación de potencia activa de las máquinas del sistema. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 La Figura VIII.2 muestra la actuación de una malla de control de potencia activa y de una malla de control de potencia reactiva de una máquina del sistema. Figura VIII.2 - Mallas de control de una máquina del sistema VIII.4.3.4. Regulador Asíncrono Un regulador asíncrono tiene su funcionamiento como un integrador, como mostrado en la Figura VIII.3. f K s P Figura VIII.3 - Integrador De esa forma, solamente cesará su actuación, o sea, P 0 , cuando la frecuencia retornar rigurosamente a su valor original (60Hz), característica de un integrador matemático. La Figura VIII.4 muestra la respuesta en el tiempo de una unidad generadora, dotada de un regulador asíncrono, cuando es sometida a un aumento de carga. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-7 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura VIII.4 - Respuesta en el tiempo de una unidad generadora con regulador asíncrono Un aumento en la carga hace aquel a frecuencia (o velocidad del rotor) decae. Con la caída de la frecuencia, la potencia mecánica del generador comienza a aumentar. Este aumento causa una disminución en la tasa de decaimiento de la frecuencia, hasta el punto en que la frecuencia comienza a aumentar y alcanza su valor nominal. En este punto el valor en régimen del aumento de potencia mecánica del generador es igual al aumento de carga. En sistemas de potencia con más de una unidad generadora supliendo las diversas cargas, este tipo de regulador aunque presente la ventaja de hacer con que la frecuencia retorne a su valor original, trae serios problemas de inestabilidad y imposibilidad de repartición adecuada de la carga entre las unidades generadoras. VIII.4.3.5. Regulador con Caída de Velocidad Para que se tenga una división estable de la carga entre dos o más unidades generadoras operando en paralelo, los reguladores de estas unidades deben presentar una característica de caída de velocidad o estatismo (R). Esta característica de regulación puede ser obtenida añadiendo una señal de realimentación en paralelo al integrador de la Figura VIII.3, como es mostrado en la Figura VIII.5. f K P s R Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-8 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura VIII.5 - Regulador con estatismo Este tipo de regulador por lo tanto presenta un error de P 1 en régimen permanente, o sea, R 1 f (en régimen permanente). R La relación anterior puede ser reescrito de la siguiente forma: PG PG 0 1 (f R f0 ) 0 (2) Esta caución corresponde a la ecuación de una recta como indicado en la Figura VIII.6. Figura VIII.6 - Característica f x P La Figura VIII.7 muestra la respuesta en el tiempo de una unidad generadora, dotada de un regulador con estatismo, cuando es sometida a un aumento de carga. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-9 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura VIII.7 - Respuesta en el tiempo de una unidad generadora con regulador con estatismo Si dos o más unidades generadoras dotadas de reguladores con estatismo están conectadas a un mismo sistema de potencia, existirá solamente un único valor de frecuencia para el cual las unidades dividirán el aumento de carga. La Figura VIII.8 presenta dos unidades generadoras con estatismos R1 y R2 respectivamente. Inicialmente el sistema está operando a una frecuencia nominal f 0 , y cada máquina generando P1 y P2 . Cuando tenemos un aumento de carga Pd los reguladores harán que la potencia mecánica de cada generador aumente hasta alcanzar un nuevo punto de equilibrio con un nuevo valor de frecuencia. La parte del aumento de generación que cada generador absorberá, dependerá del estatismo de cada máquina y puede ser calculado a través de las relaciones: P1 P1' P1 f R1 (3) P2 P2' P2 f R2 (4) Donde, P1 P2 Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência Pd (5) VIII-10 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura VIII.8 - División de carga por dos unidades dotadas de reguladores con estatismo La utilización de reguladores con estatismo supera los inconvenientes de los reguladores asíncronos, o sea, los problemas de estabilidad y de repartición de carga. Sin embargo trae un problema adicional, que es el alejamiento, en régimen permanente, de la frecuencia original. Este desvío de frecuencia en régimen permanente crea la necesidad de una segunda práctica de regulación, que constituye la llamada Regulación Secundaria. VIII.4.3.6. Regulación Secundaria En el ítem VIII.4.3.3 fue verificado que con la actuación de un regulador de velocidad con estatismo, un impacto de carga en un sistema de potencia provoca en el mismo una variación de frecuencia en régimen transitorio, y que después de terminados estos transitorios la frecuencia se estabilizaba en un nuevo valor, diferente de la frecuencia nominal. Si ninguna providencia adicional fuera tomada podríamos tener niveles de variación de frecuencia inaceptables. La restauración de la frecuencia del sistema para su valor nominal requiere entonces una acción de control suplementaria. Este control suplementaria constituye la llamada Regulación Secundaria que tiene su acción a través del ajuste de una señal de referencia en el regulador de velocidad. La Figura VIII.9 muestra el regulador de velocidad con la señal de referencia. f ref f f cag 1 R Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência 1 1 s TG Pmec VIII-11 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura VIII.9 - Regulador de velocidad con regulación secundaria Falta, por lo tanto, determinar cuál deberá se la señal inyectada para hacer con que la frecuencia retorne a su valor inicial después de un impacto de carga. Notamos en el ítem anterior que el tipo de control que obliga el desvío original retornar a cero, es el control integral presentado en el regulador asíncrono. Puede ser entonces, utilizado un controlador del tipo PI (proporcional e integral) que hace que el error en régimen sea nulo además de acelerar el proceso de corrección del error. La Figura VIII.10 muestra una posible estructura de la regulación secundaria. La señal de entrada del regulador es el error de frecuencia, y la señal de salida es la señal de referencia para el regulador de velocidad. f barra KI s f cag f ref KP Figura VIII.10 - Señal de referencia En la Figura VIII.11 es mostrado el diagrama de bloques con regulación primaria y secundaria. 1 1 s TG 1 R Pmec f KI s f cag KP Figura VIII.11 - Regulación Primaria y Secundaria Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-12 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 El gráfico f x P de la Figura VIII.12 muestra el caso de una única unidad generadora alimentando una carga que está operando en el punto 1 en el estado de equilibrio inicial. Después de una variación de carga Pd la carga pasará a Pd 1 y a unidad generadora suministrará PG1 Pd 1 , no obstante una frecuencia más baja f1 . Estaremos por lo tanto operando en el punto 2. El control secundario continuará actuando y solamente cesará su acción cuando la frecuencia vuelve a su valor original. Debemos notar que la accionó del control secundario no interfiere en la característica de estatismo de la máquina. Luego el nuevo punto de operación después de la actuación del control secundario corresponderá al punto 3. Figura VIII.12 - Característica f x P con regulación secundaria VIII.4.4. Resonancia Sub-Síncrona La definición de Resonancia Sub-Síncrona (RSS) dada por el IEEE es la siguiente [5]: Resonancia Sub-síncrona es una condición del sistema de potencia donde la red eléctrica cambia energía con la turbina que acciona el generador en una o más frecuencias naturales del sistema combinado, abajo de la frecuencia síncrona del sistema. A pesar de la definición no mencionar, este tipo de fenómeno es más observado en los sistemas térmicos, dejando a Brasil prácticamente libre, de momento, de este tipo de problema, debido a la gran dominancia de la generación del tipo hidráulica en el país. El ejemplo más común de RSS es en sistemas con compensación serie. Las líneas con compensación serie forman un circuito RLC con una frecuencia natural definida en (VII.2) 1 XC (VII.2) n B LC XL Esta frecuencia aparece modulada en el rotor del generador con una componente supersíncrona y una componente subsíncrona. La componente subsíncrona puede integrar de limitadamente con la frecuencia natural de oscilación del sistema mecánico del tipo masaCurso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-13 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 resorte constituido por el generador, turbina y eje. Si la condición de resonancia ocurra, habrá una cambio de energía con frecuencia n que podrá acarrear en fatiga del eje, consecuentemente, con pérdida de vida útil del mismo o ruptura. VIII.4.5. Modulación de los Sistemas CCAT Los sistemas de potencia actuales consisten básicamente de líneas de transmisión de corriente alterna (CA). Sin embargo, en casos que se necesiten transmisión de potencia a largas distancias, como en el caso de Brasil, el uso de sistemas de Corriente Continua a Alta Tensión (CCAT) puede ser económicamente atractiva. Una aplicación secundaria de los sistemas CCAT, es la de hacer uso de los controles de los conversores y de los inversores en el amortiguamiento de oscilaciones electromecánicas. VIII.4.6. Controle de los equipamientos FACTS Con la evolución de la tecnología de los tiristores de potencia, de la microelectrónica y de los microprocesadores, un nuevo concepto, llamado Flexible AC Transmission Systems (FACTS), fue introducido en el área de sistemas de potencia. Este nuevo concepto fue idealizado teniendo como objetivo principal hacer que los límites de los sistemas CA actuales mecánicamente controlados, pudieran ser ultrapasados de forma de aumentar la "flexibilidad" de los sistemas. Con la ganancia de confiabilidad y velocidad de los dispositivos electrónicos para alta potencia, la tecnología FACTS puede ofrecer mejorías en la operación de los sistemas de potencia como, por ejemplo: mayor control sobre el flujo de potencia, de forma que el flujo recorra un camino más apropiado; mayor aprovechamiento de la capacidad de transmisión de las líneas; mayor habilidad de transferir potencia entre controladores de área, de forma que la reserva girante pueda ser reducida; auxiliar en el amortiguamiento de oscilaciones electromecánicas, consecuentemente, aumentando el límite de transferencia de potencia. Los principales equipamientos FACTS están relacionados abajo: TCSC (Thyristor-Controlled Series Compensator) SVC (Static VAr Compensator) TCPR (Thyristor-Controlled Phase Regulator) TCBR (Thyristor-Controlled Braking Resistor) STATCON (Voltage Source Static Condenser) UPFC (Universal Power Flow Controller) VIII.4.7. Control Coordinado de Tensión El Control Coordinado de Tensión (CCT) es una jeraquización de la malla sistémica de controle tensión-potencia reactiva, semejante al que es hecho en la malla de control cargafrecuencia. El CCT viene siendo empleado de forma creciente en varios países europeos, incluyendo Francia [18], Italia [19], España y Bélgica. El permite una mejor utilización de las fuentes de potencia reactiva resultando, por lo tanto, en reducción en los gastos con equipamientos de compensación de factor de potencia (incluyendo compensadores estáticos reactivo), aumento del margen de cargamento, confiabilidad y seguridad del sistema además Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-14 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 de reducir la operación de los taps de los transformadores, disminuyendo la necesidad de mantenimiento con frecuentes cambios de aceite. El CCT consiste en la actuación de un grupo específico de reguladores de tensión de los generadores, compensadores estáticos o síncronos, taps de transformadores, etc, de forma de mantener el perfil de tensión deseado en barras, dichas, piloto. Las tensiones de esas barras piloto deben ser representativas del perfil de tensión de la región en la cuál están insertadas. VIII.4.7.1. Niveles Jerárquicos El CCT, es en general, subdividido en tres niveles jerárquicos, que pueden ser definidos por áreas geográficas (local, regional, etc) y por diferentes dominios de tiempo (de segundos a varios minutos). Cada uno de estos niveles jerárquicos tienen papeles específicos que son descritos a continuación: Control Primario de Tensión (CPT) El CPT es el nivel jerárquico más rápido del CCT, pudiendo ser subdividido en control individual de los generadores y control de las plantas. Control de los Generadores Este nivel de control es constituido por la actuación de los reguladores de tensión de los generadores. Los reguladores mantiene la tensión terminal de los generadores iguales, o muy próximos a los valores de referencia fijados por los operadores o por los controles de los niveles jerárquicos más elevados. Control de las Plantas El objetivo de este nivel de control es mantener la tensión de la planta en valores especificados a través de una distribución balanceada de potencia reactiva en las unidades de generación. Controle Secundario de Tensión (CST) El control secundario de tensión consiste en la actuación de un grupo específico de reguladores de tensión de los generadores, compensadores estáticos o síncronos, taps de transformadores, etc, de forma de mantener el perfil de tensión deseada en barras, dichas, piloto. Las tensiones de esas barras piloto deben ser representativas del perfil de tensión de la región en la cuál están insertadas. El control secundario de tensión actúa en una escala de tiempo de 30s a 60s, por ejemplo, y se caracteriza por ser un control de efecto regional. Controle Terciario de Tensión(CTT) Un de los principales objetivos del control terciario de tensión, es el de garantizar de, forma preventiva, la seguridad e integridad del sistema. Para eso, un algoritmo de flujo de potencia óptimo, es en general, utilizado en este nivel jerárquico. La maximización de las reservas de potencia reactiva es una importante función objetivo a ser optimizada. La Figura VIII.14, muestra la estructura jerárquica del CCT, considerando las áreas geográficas y constantes de tiempo. La Figura VIII.15 presenta el diagrama esquemático de los tres niveles jerárquicos del CCT. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-15 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Espaço CTT Sistema CST Área CPT Gerador Segundo Minuto Hora Tempo Figura VIII.14. Niveles Jerárquicos de un Control Coordinado de Tensión Vp ótimo CTT SCADA Vref CST CPT Vt Vp Barra Piloto Efd Resto do Sistema Constantes de Tempo Figura VIII.15. Diagrama Esquemático del CCT VIII.4.7.2. Beneficios de una Coordinación de Potencia Reactiva Algunos de los beneficios que podemos destacar debido a una implementación de control coordinado de la potencia reactiva, son: Economía con la reducción de las pérdidas del sistema; Mejoría del perfil de tensión; Mejoría en el control de la tensión – una estrategia de control global comparada con una estrategia local tiene la ventaja de proporcionar un grado de control habilidad mayor sobre las variables del sistema. Sin embargo, inversiones en equipamientos de comunicación y medición son necesarios para que esta ventaja pueda ser aprovechada; Mejoría en la seguridad del sistema – el nivel de seguridad del sistema aumenta con una mejor utilización de las fuentes de potencia reactiva; Aumento de la capacidad de transmisión disponible – la disminución del cargamento de los equipamientos de transmisión debido a la reducción del flujo de potencia reactiva, permite el aumento de transmisión de potencia activa. Los aumentos de transacciones de potencia activa son económicamente muy atractivos; Mejoría de la operación del sistema – una estrategia de despacho de potencia reactiva puede ofrecer a los operadores del sistema un mejor control sobre flujos de potencia reactiva, niveles de reserva y perfil de tensión. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-16 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência VIII-17 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 IX. INTRODUCCIÓN LA ESTABILIDAD PEQUEÑAS PERTURBACIONES A LAS IX.1 Modelo Dinámico del Sistema El desempeño dinámico de un sistema de potencia puede ser descrito por un conjunto de n ecuaciones diferenciales ordinarias de primer orden u un conjunto auxiliar de m ecuaciones algebraicas, de la forma xi f i x1 , x2 ,, xn , r1 , r2 ,, rm , u1 , u2 ,, uk , t i 1, 2,, n (VII.3) 0 g j x1 , x2 ,, xn , r1 , r2 ,, rm , u1 , u2 ,, uk , t j 1, 2,, m b b g g donde n es la orden del sistema (número de ecuaciones diferenciales), m es el número de ecuaciones algebraicas y k es el número de variables de entrada (excitaciones). Se Puede utilizar notación vectorial para compactar estas ecuaciones, resultando en x f x, r , u, t (VII.4) 0 g x, r , u , t LM x OP MM x PP MN x PQ 1 donde x 2 n LM r OP MMr PP MNr PQ 1 r 2 m LM u OP MMu PP MNu PQ 1 u 2 k RS b g T b g LM f bgOP LM g bg OP f bgP g bg P f bg M gbg M MM PP MM PP MN f bgPQ MN g bgPQ 1 1 2 2 n m El vector x es llamado de vector de estados y las variables xi son llamadas variables de estado. las variables rj son variables algebraicas y el vector u es el vector de variables de entrada. El estado de un sistema representa el conjunto mínimo de informaciones sobre el sistema, en un instante dado de tiempo t0, necesario para la determinación de su comportamiento sin la necesidad de ninguna información referente a instantes de tiempo anteriores. Si la orden del sistema es n, cualquier conjunto de n variable del sistema que sea linealmente independiente puede ser utilizado. Estas variables son llamadas, entonces, de variables de estado. Se puede mostrar que las demás variables del sistema pueden ser escritas como funciones de las variables de estado. Las variables de estado pueden ser grandezas físicas como velocidad, posición, tensión, corriente, etc., o pueden ser variables matemáticas abstractas asociadas con las ecuaciones diferenciales que describen el sistema. La elección de un conjunto de variables de estado no es única y, en general, uno de estos conjuntos es utilizado para la obtención del modelo (determinación de las ecuaciones diferenciales y algebraicas que describen el sistema) y un segundo conjunto puede ser utilizado para su solución. Este cambio de variables de estado corresponde, matemáticamente, a un cambio del sistemas de coordenadas. IX.2 Punto de equilibrio Los puntos de equilibrio son caracterizados por todas las derivadas de las variables de estado para ser simultáneamente nulas, haciendo que todas las variables de estado sean constantes (invariantes en el tiempo). Por lo tanto, un punto de equilibrio o punto singular debe satisfacer el siguiente conjunto de ecuaciones: Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IX-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 RS0 f bx , r , u g T0 gbx , r , u g 0 0 0 0 0 0 (VII.5) donde x0 y r0 son los vectores de variables de estado y algebraicas en el punto de equilibrio, respectivamente. Si el sistema fuera lineal, sólo hay un único punto de equilibrio. Sistemas no-lineales pueden poseer diversos puntos de equilibrio. La estabilidad de un sistema lineal independiente de la entrada aplicada, y los estados de un sistema lineal estable siempre retornarán para el punto de equilibrio para cualquier condición inicial finita. Ya un sistema no-lineal tiene su estabilidad influida por la amplitud y tipo de entrada aplicada, así como por la condición inicial considerada. Para sistemas no-lineales, se puede clasificar la estabilidad en diversas categorías, dependiendo de las condiciones a ser analizadas. Estabilidad local Un sistema es dicho localmente estable en torno de un punto de equilibrio si, cuando sometido las pequeñas perturbaciones, él permanece en una región (pequeña) en torno del punto de equilibrio. Si el sistema retorna al punto de equilibrio, él es dicho asintóticamente estable. La estabilidad local (o estabilidad a pequeñas perturbaciones) puede ser estudiada a través de la linealización de las ecuaciones en torno del punto de equilibrio considerado. Estabilidad finita Si el estado del sistema permanece dentro de una región finita R, el sistema es dicho estable en R. Si, además de eso, él retorna al punto de equilibrio original, el sistema es dicho asintóticamente estable en R. Estabilidad global El sistema es globalmente estable si su región de estabilidad R incluye todo el espacio finito. IX.3 Linealización Se puede lineal izar las ecuaciones que describen un sistema en torno de un punto de equilibrio (x0, r0, u0) utilizando la expansión en serie de Taylor. Despreciándose los términos de orden superior, la ecuación (III.1) puede ser escrita como f f f x 0 x f x 0 , r0 , u 0 x r u x x 0 ,r0 ,u 0 r x0 ,r0 ,u 0 u x 0 ,r0 ,u 0 (VII.6) g g g 0 g x 0 , r0 , u 0 x r u x x 0 ,r0 ,u 0 r x 0 ,r0 ,u 0 u x 0 ,r0 ,u 0 b g b g y, utilizando la ecuación (III.3), el modelo linealizado del sistema es dado por f f f x x r u x x 0 ,r0 ,u 0 r x 0 ,r0 ,u 0 u x 0 ,r0 ,u 0 0 g x x x 0 ,r0 ,u 0 g r r x 0 ,r0 ,u 0 g u u x 0 ,r0 ,u 0 (VII.7) En general, sólo determinadas variables del sistema son de interés. Estas variables son llamadas variables de salida y pueden ser escritas a partir de las variables de estado como siendo Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IX-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 b g (VII.8) y h x, r, u Esta ecuación también puede ser linealizada en torno del punto de equilibrio del sistema, resultando en h h h (VII.9) y0 y h x0 , r0 , u0 x r u x x0 ,r0 ,u0 r x0 ,r0 ,u0 u x0 ,r0 ,u0 Las ecuaciones (III.4) y (III.20) pueden ser reescritas en forma matricial como f f f x x x r u u g g g 0 r (VII.10) x r x0 ,r0 ,u 0 u x0 ,r0 ,u 0 b g L OP LM OP LM OP MM L O PP MN PQ MM PP N Q M N Q N Q L h h OP LM xOP LM h OP u y M N x r Q N rQ N u Q LM I 0OP LM x OP LM x OP LMJ J OP LM xOP LMB OP u N0 0Q N r Q N 0 Q NJ J Q N r Q NB Q L xO y C C M P D u N rQ x 0 ,r0 ,u 0 o x x 0 ,r0 ,u 0 1 2 x 3 4 r r (VII.11) a y este sistema de ecuaciones puede ser representado de forma compacta como T x a J x a B a u (VII.12) y Ca x D a u Este sistema de ecuaciones es conocido como sistema descrito y pode ser entendido como una generalización de la ecuación de estados convencional. La matriz J es llamada de matriz Jacobiano del sistema y, para el caso de sistemas eléctricos de grande porte. Esta característica es fundamental para la implementación eficiente de los métodos computacionales de análisis de este problema. La obtención de la ecuación de estados es hecha a través de la eliminación de las variables algebraicas r en la ecuación (VII.11). se puede escribir que 0 J 3 x J 4 r Br u r J 41 J 3 x Br u y, sustituyendo el valor de r, se obtiene x J 1 x J 2 J 4 1 J 3 x B r u (VII.13) y Cx x C J 41 J 3 x B r u Da u o, agrupando los términos, x J1 J 2 J 4 1 J 3 x J 2 J 41 B r u A x B u (VII.14) y C x Cr J 4 1J 3 x Cr J 4 1 B r Da u C x D u b b b c c h c h c g g g h h IX.4 Ecuaciones de Estado de un Sistema de Potencia El ejemplo del generador conectado a un sistema de potencia de gran porte (barra infinita) a través de líneas de transmisión radiales es, probablemente, el problema de estabilidad más estudiado de la historia. Este es el más simples de los sistemas eléctricos, permitiendo el Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IX-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 desarrollo analítico de su solución y proporcionando la comprensión de los aspectos físicos envueltos en el fenómeno de la estabilidad de sistemas de potencia. La Figura 39 presenta el diagrama unifilar del sistema máquina x barra infinita. La tensión de la barra infinita es considerada constante durante el periodo transitorio del sistema y el generador será representado por modelos dinámicos de diversos niveles de sofisticación. VB 0o Vt Re Xe Figura 39. Diagrama Unifilar del Sistema Máquina x Barra Infinita Despreciando los efectos transitorios de los enrollamientos del estator, así como de la línea de transmisión, la solución de la red eléctrica puede ser obtenida fasorialmente como Ir Re X e Vr Vb 1 (VII.15) Im Re Vm 0 Re2 X e2 X e ~ ~ donde I t I r jI m es la corriente y Vt Vr jVm es la tensión terminal del generador. El modelo dinámico del generador, en general, está basado en la Transformada de Park y, por lo tanto, utiliza variables referidas para un nuevo conjunto de coordenadas dq. La relación que transforma variables de la referencia del sistema (rm) para la referencia de la máquina (dq) es dada por sin cos d r (VII.16) cos sin q m y la relación inversa puede ser escrita como sin cos d r (VII.17) cos sin q m Estas transformaciones se aplican para todas las grandezas faso riales del sistema, como las tensiones y las corrientes. LM OP N Q OP RSLM OP LM OPUV Q TN Q N Q W LM N LM N LM N OP Q OP Q OP LM QN OP LM QN LM N LM N OP Q OP Q IX.5 Modelo Clásico del Generador El modelo clásico para el generador se caracteriza por despreciar la dinámica asociada a todos los enrollamientos de la máquina, manteniéndose sólo las ecuaciones diferenciales asociadas al movimiento del rotor. En este caso, la máquina síncrona es representada por una tensión constante atrás de la impedancia transitoria de eje d. Las ecuaciones diferenciales asociadas a este modelo son: d 1 Tm Te KD dt 2 H (VII.18) d 0 1 dt y, por lo tanto, la velocidad es la posición angular pueden ser tomadas como variables de estado para la representación de este sistema. La tensión interna de la máquina puede ser obtenida a partir de las condiciones terminales, determinadas por el flujo de potencia del sistema, como ~ ~ ~ ~ ~ (VII.19) E Vt Ra jX d I t Vb Ra Re j X d X e It E b g b g b g Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência b g IX-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Para que la ecuación (III.20) sea colocada en la forma de una ecuación de estados, mostrada en (III.11), se debe expresar el torque eléctrico Te en función de las demás variables del problema y, en p.u., se puede escribir que Te Pe E 2 RT E Vb RT cos E Vb X T sin 2 2 RT X T (VII.20) donde RT = Re + Ra e XT = Xe + X’d. El modelo del sistema máquina x barra infinita, con el generador representado por el modelo clásico, puede ser escrito como d 1 E 2 RT E Vb RT cos E Vb X T sin Tm KD 2 2 dt 2 H RT X T (VII.21) d 0 1 dt La determinación del punto de equilibrio para este sistema de ecuaciones es hecha a partir de las condiciones terminales de la máquina, obtenidos del flujo de potencia: FG H IJ K b g 1. Obtener las componentes de la tensión terminal Vr 2. Obtener las componentes de la corriente terminal I r ~ 3. Determinar la tensión interna E bV Vt cos y Vm PVr QVm g b Vt 2 Vt sin PVm QVr y Im 2 Vt g Ra I r X d I m j Vm Ra I m X d I r E tan 1 m 4. Determinar el ángulo de carga Er La linealización de las ecuaciones de estado en torno del punto de operación resulta en d 1 E Vb RT sin 0 E Vb X T cos 0 Tm KD dt 2H RT2 X T2 (VII.22) d 0 dt o, en la forma matricial, KD KS 1 d 2 H Tm (VII.23) 2H 2H dt 0 0 0 E Vb RT sin 0 E Vb X T cos 0 donde KS es el coeficiente de torque sincronizante, RT2 X T2 conforme definido en la ecuación (I.3). La Figura 40 presenta el diagrama de bloques correspondiente a la ecuación de estados mostrada en (III.24). r FG H LM OP LM N Q MN Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IJ K OP L O L PQ MN PQ MMN OP PQ IX-5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Tm + 1 2Hs - 0 s Te + KD + KS Figura 40. Diagrama de Bloques del Sistema Máquina x Barra Infinita Linealizado con Modelo Clásico del Generador Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência IX-6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 X. ESTABILIDAD DE TENSIÓN X.1 Conceptos Básicos y Definiciones Los sistemas eléctricos de potencia de hoy, altamente cargados, están enfrentando creciente riesgo que presentan problemas asociados a la inestabilidad de tensión. En parte, esto se debe a las restricciones ambientales e incertidumbres económicas, que limitan la inversión en nuevas líneas de transmisión reduciendo los márgenes de transmisión existente. La estabilidad de tensión es un problema relativamente complejo que atraído el interés de los técnicos del sector eléctrico, pasando a recibir el mismo grado de atención dispendido a los problemas de estabilidad angular. La estabilidad de tensión está relacionada con la capacidad de un sistema de potencia mantener tensiones aceptables en todas sus barras tanto en condiciones normales cuanto en situaciones de emergencia. Normalmente, un sistema entra en un estado de inestabilidad de tensión cuando sometido a una contingencia, aumento de la demanda, o después de cambios en las condiciones del sistema que causan un progresivo e incontrolable declinación en la tensión. El principal factor que causa inestabilidad de tensión es la incapacidad del sistema de potencia de atender la demanda de potencia reactiva. A continuación son presentados los principales factores responsables por la ocurrencia de la inestabilidad de la tensión: aumento de carga en la líneas de transmisión ya bastante cargadas; cargas del tipo motor de inducción; generadores distantes de los centros de carga; niveles bajos de tensión terminal de los generadores; insuficiencia de compensación reactiva en la carga; operación inadecuada de los LTC’s y de elementos de protección; desconexión de elementos, como por ejemplo, capacitores. Enseguida, son apuntadas las principales medidas efectivas en la mejoría de las características de estabilidad de tensión del sistema de potencia: aplicación de nuevos elementos en la red (compensadores síncronos o estáticos, capacitores, etc); control de la tensión de la red y de la tensión terminal de los generadores; control de cambio de tap de transformadores; X.2 Análisis estático El análisis o simulación estática usada en los estudios de estabilidad de tensión es basada en el análisis de un instantáneo del sistema en el cual los elementos dinámicos son representados de forma bastante aproximada, a través del uso de inyecciones de potencia o corriente y tensión constantes. Este tipo de análisis es realizado utilizando programas de flujo de potencia, flujo de potencia continuado o flujo de potencia óptimo. Normalmente, en esos estudios, se investiga la máxima capacidad de cargamento del sistema o de un subsistema. La famosa “curva de la nariz” (curva P x V) es muy utilizada en la visualización del punto máximo de cargamento en el análisis estático. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 X.3 Estabilidad de tensión a la pequeña perturbación Está relacionada con la capacidad del sistema en controlar la tensión después de una pequeña perturbación (variaciones leves de carga o generación). Esta forma de estabilidad puede ser estudiada con aproximación de régimen permanente, utilizando la linealización de las ecuaciones dinámicas del sistema en un punto dado de operación. En el análisis de esta forma de estabilidad es utilizado un modelo de régimen permanente para el sistema de potencia. La diferencia básica de ese análisis para el análisis estático, es que en ese caso el punto de equilibrio del sistema es obtenido a través del modelo algebraico-diferencial, mientras que en el análisis estático el punto de equilibrio es obtenido del modelo puramente algebraico (ecuaciones del flujo de potencia). La “curva de la nariz” también es utilizada en esos estudios. X.4 Estabilidad transitoria de tensión a la gran perturbación Está relacionada con la capacidad del sistema en controlar la tensión después de una gran perturbación (p.ej: pérdida de una línea de transmisión después de un corto-circuito, pérdida de grandes bloques de carga o pérdida de generación). La inestabilidad transitoria de tensión es debida, principalmente, a la acción de componentes de la carga y equipamientos de control de dinámica rápida tales como motores de inducción, aros de corriente continua, etc. Este tipo de estabilidad puede ser estudiado con auxilio de la simulación no-lineal en el dominio del tiempo, con inclusión de modelar apropiado de los elementos dinámicos del sistema. Para el análisis de esta forma de estabilidad de tensión se utiliza un modelo dinámico, similar al utilizado en el análisis de estabilidad transitoria, modelo que lleva en consideración las ecuaciones algebraicas no-lineales de la red y las ecuaciones diferenciales no-lineales de los componentes del sistema. X.5 Estabilidad de Mediano y Largo Plazo Los términos de estabilidad de largo plazo y de mediano plazo son resultados de la necesidad de ocuparnos con problemas asociados al comportamiento dinámico de los sistemas de potencia después de severas perturbaciones, o aún, de ocurrencias en cascada, con duración más prolongada. X.5.1. Estabilidad de tensión de mediano plazo Envuelve periodos de tiempo de segundos a algunos minutos, usualmente 1 a 5 minutos. En los estudios de estabilidad de mediano plazo, dirigimos nuestra atención al sincronismo de las oscilaciones de la potencia entre las máquinas, incluyendo los efectos de algunos fenómenos más lentos como acción automática de cambio de tapes de transformadores y limitación de la corriente del generador. En esas condiciones, la intervención del operador ni siempre es posible. X.5.2. Estabilidad de tensión de largo plazo Envuelve plazos de algunos minutos a decenas de minutos. Para esta análisis, se asume que las oscilaciones entre las máquinas del sistema ya se encuentran amortiguados. Se enfocan aquí, los fenómenos lentos y de larga duración asociados a las diferencias entre las potencias, activas y reactivas, generadas y consumidas. Factores que pueden estar incluidos son: tiempo de capacidad de sobrecarga en líneas de transmisión (decenas de minutos), diversidad en la pérdida de carga (por ej., cargas controladas por termostato demoran más para ser Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 desconectadas por baja tensión), control automático de generación, oportunidad en la aplicación de equipamientos teniendo como objetivo el control de tensión / reactivos y otras intervenciones del operador como el corte manual de carga. La estabilidad de tensión de mediano y largo plazo es normalmente estudiada con auxilio de la simulación no-lineal en el dominio del tiempo, con inclusión de modelos apropiados de los elementos dinámicos del sistema. Para analizar de esta forma de estabilidad de tensión se destaca el uso de dos métodos de simulación en el tiempo: Simulación completa en el tiempo utilizando un método de integración numérica con paso variable. En este método a medida que las variables se van acomodando en el nuevo punto de equilibrio, posperturbación, el paso del método de integración aumenta. Simulación rápida en el tiempo utilizando una aproximación de las dinámicas transitorias. En ese método las dinámicas transitorias son consideradas estables y instantáneas. La Figura 41 muestra una comparación entre un programa de simulación completa y un programa de simulación rápida en el tiempo. La figura muestra la tensión de una barra cuando sometida al aumento de carga. Se nota que en el programa de simulación completa (estabilidad transitoria) toda dinámica transitoria es capturada por el método de integración numérica. En la simulación rápida la dinámica transitoria no es modelada, haciendo que el sistema “pule” del punto de equilibrio predisturbio para el punto de equilibrio postdisturbio. Barra 30 (Barra de Carga) 1,02 1,00 0,98 0,96 0,94 0,92 0,90 0,88 0,86 0,84 0,82 0,80 0,78 49 Simulador Rápido Programa de Estabilidade Transitória 50 51 52 53 54 Tempo (s) Figura 41. Comparación entre la simulación completa y la simulación rápida en el tiempo X.6 Límite de la Capacidad de Generación de Potencia Reactiva2 En estudios de estabilidad de tensión es muy importante considerar los límites de capacidad de generación de potencia reactiva de los generadores síncronos. Esos son, normalmente, especificados de acuerdo con su capacidad nominal de generación (MVA) a una tensión dada y factor de potencia. La generación de potencia activa es limitada por la capacidad del sistema 2 As figuras dessa seção foram retiradas do livro, “Power System Stability and Control,” P. Kundur, 1994. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 motriz, cuando ese tenga una capacidad menor que la capacidad nominal de la máquina. La generación, de forma continua, de potencia reactiva es limitada por tres factores: límite de la corriente de armadura, límite de la corriente de campo y límite por calentamiento en la parte final de la armadura. X.6.1. Límite de la Corriente de Armadura El límite de la corriente de armadura está relacionado con la máxima corriente soportable que no exceda el limite de calentamiento del circuito de la armadura. El límite de corriente de la armadura en el plano P-Q es mostrada en la Figura 42. Figura 42. Límite de la Corriente de la Armadura X.6.2. Límite de la Corriente de Campo 2 Debido al calentamiento resultante de la pérdida R fd i fd , la corriente del campo impone un segundo límite en la operación del generador. La Figura 43 muestra en el plano P-Q el límite debido a la corriente de campo. La relación entre las potencias activa y reactiva para una 2 corriente dada de campo es un círculo con centro en Et / X S en el eje Q, y con rayo igual a la ( X ad / X S ) Et iif . Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 43. Límite de la Corriente de Campo La Figura 43 muestra que la intersección de las dos curvas (punto A) representa la potencia y el factor de potencia nominal de la máquina. X.6.3. Límite por calentamiento en la extremidad de la armadura El calentamiento localizado en la extremidad de la armadura, conforme mostrado en la Figura 44, impone un tercer límite a la operación del generador. Esa limitación de la capacidad del generador acontece cuando la máquina está operando en la condición subexcitada. E la región terminal de la máquina el flujo magnético de dispersión penetra en el estator de forma axial causando corrientes parásitas (o corrientes de Foucault) con consecuencia de calentamiento localizado. Cuando el generador está sobre excitado a corriente de campo elevada satura el anillo de retención (mostrado en la Figura 44) que limita el flujo de dispersión. Sin embrago cuando el generador está subexcitado las corrientes menores no saturan el anillo de retención, permitiendo mayores flujos en la armadura y de dispersión. Así mismo, en la condición de subexcitación, el flujo producido por la corriente de armadura se suma al flujo producido por la corriente de campo. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 44. Vista de corte de la parte final del generador La Figura 45 muestra el límite debido al calentamiento de la parte final de la armadura cuando el generador se encuentra subexcitado. Figura 45. Límite asociado al calentamiento de la parte final de la armadura Los limites de corriente de campo y de armadura cuando mostrados en el plano P-Q dependen de la tensión terminal de la máquina. La Figura 46 muestra el efecto de la tensión terminal en esos limites. Observe que los limites disminuyen cuando la tensión terminal disminuye. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 46. Efecto de la reducción de la tensión terminal en la capacidad del generador Todos los gráficos mostrados anteriormente representan los límites impuestos por la capacidad del generador, que es definida en su proyecto de fabricación. Restricciones operativas adicionales pueden ser impuestas por los límites de estabilidad del sistema de potencia. La Figura 47 muestra las curvas de capacidad de un generador de 400 MVA, refrigerado por hidrógeno, accionado por una turbina vapor, en la tensión nominal. La eficacia del sistema de refrigeración, con influencia consiguiente en la capacidad del generador, depende de la presión del hidrógeno. Observe que a medida que se aumenta la presión del hidrógeno, se aumenta la capacidad operativa del generador. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-7 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 47. Efecto de calentamiento del generador a la tensión nominal en su capacidad Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência X-8 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 XI. AUTO–EXCITACION El fenómeno de la auto-excitación es otra forma de instabilidad que puede ocurrir en máquinas sincronías y máquinas de inducción. La auto-excitación eléctrica puede ocurrir cuando el circuito, al cuál la máquina está ligada, contiene elevadas capacitancias. Por ejemplo, un generador síncrono puede estar ligado a una línea de transmisión abierta, o un motor de inducción puede ser dejado ligado a los terminales de un capacitor. La auto-excitación ocurre cuando el generador pierde el control de su tensión terminal. Esta condición aparece en condiciones especiales en que la cantidad de potencia reactiva suministrada por el sistema es mayor que la capacidad absorción de la máquina. eso puede ocurrir, por ejemplo, en sistemas de líneas largas después un rechazo de carga. En estos casos, la actuación del regulador de tensión, en general, no es suficiente para evitar el problema. La auto-excitación puede causar diversos problemas graves como la perdida de vida útil de dieléctricos y, incluso, la quema del generador. Para fijar los conceptos básicos del fenómeno de la auto-excitación, analizaremos el caso simplificado de un generador ligado a una capacitancia C, conforme muestra la Figura 48. Gerador Síncrono V I C Figura 48. Generador síncrono conectado a una capacitancia Despreciando los efectos subtransitorios la máquina puede simplificadamente ser representada por los circuitos equivalentes de ejes d y q, dados en la Figura 49. L L i fd id Lad i kq iq Laq L fd L kq q d rfd rkq efd eixo d eixo q Figura 49. Circuitos equivalentes de ejes d e q Visto que los fenómenos de la auto-excitación son frecuentemente asociados a 1,0 y X L ni siempre puede ser condiciones de sobre frecuencia, la suposición de que hecha. Consecuentemente, los enlaces de flujos y las tensiones serán guardadas independientes. De la Figura 48, se tiene: Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XI-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 V Xc I V V 1/ j C ed jeq entonces, I j (ed jeq ) C eq C jed C donde eq C y iq id ed C Las ecuaciones de tensión y corriente del estator (despreciando los términos d y la dt resistencia de armadura) en el sistema de coordenadas dq0, son: eq d id eq C ed iq e ' q id L ' d q 2 d C Ce'q id 2 L'd C e ' d iq L ' q 2 ed C q C Ce'd iq 2 L'd C donde e' q id L ' d d e' d q L ' q iq Las ecuaciones de tensión transitoria de ejes d y q relacionadas con las grandezas del rotor son: T ' do de' q E fd Lad i fd dt T ' qo de'd Laq ikq dt donde E fd T ' do T ' qo e fd r fd Lad L ffd r fd Laq Lkq rkq Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XI-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Lad i fd e' q id ( Ld L' d ) f ( e' q / ) o donde f (e'q / ) es el exceso de corriente de campo, debido a la saturación, la cual es una función del nivel de flujo e'q / , e L'd L fd Lad Ll L ffd . Aplicando la Transformada de Laplace, despreciando la saturación y después de mucho algebrismo, las ecuaciones arriba se tornan: Para el eje d E 'q ( s) E fd ( s ) T 'do 1 e'q (0) s 1 T 'do (1 2 Ld C 2 L' d C ) Para el eje q e'd (0) 2 1 Lq C E 'd ( s) s T 'qo (1 2 L'q C ) donde e'q (0) y e'd (0) son las condiciones iniciales de las tensiones transitorias de eje q y d, respectivamente. Analizando las expresiones anteriores, se tiene que los enlaces de flujo en el eje-d (e'q ) , exhibirán auto-excitación, esto es, aumentaran con el tiempo se: 1 T 'do (1 2 Ld C 2 L' d C ) 0 Como Ld L'd , la mayor capacitancia C, que el generador síncrono puede alimentar sin que haya auto-excitación del eje es: C 1 o Ld 2 Ld 1 C O sea, en la ausencia de reguladores de tensión, se la reactancia capacitiva de la carga fuera menor que la reactancia síncrona de eje-d, la máquina sufrirá auto-excitación. Eso tenderá ocurrir a medida que C vaya aumentando. Note que el valor de la capacitancia para auto-excitación varia inversamente con el cuadrado de la frecuencia. Eso no es bueno cuando hay sobre frecuencia en el sistema, ya que la auto-excitación se dará para valores menores de capacitancia. Lo contrario ocurre cuando hay sub-frecuencia. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XI-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 El regulador de tensión afecta solamente el flujo en el eje-d, pudiendo así influir el fenómeno de autoexcitación que ocurre segundo ese eje. Sin embargo, ello no impide que el fenómeno ocurra en el eje-q. Los enlaces de flujo no en el eje-q (e'd ) , exhibirán auto-excitación, esto es, aumentaran con el tiempo se: 2 1 T 'qo (1 Lq C 2 L' q C ) 0 Como Lq L'q , la mayor capacitancia C, que el generador síncrono puede alimentar sin que haya auto-excitación en el eje-q es: C 1 o Lq 2 Lq 1 C O sea, cuando la reactancia capacitiva de la carga sea menor que la reactancia síncrona del eje-q. El fenómeno de la auto-excitación envuelve aumentos exponenciales de flujos y tensiones en función del tiempo. El problema envuelve no linealidades debido a la saturación, exigiendo así el uso de la simulación completa en el tiempo. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XI-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 XII. REFERENCIAS [1] Edward W. Kimbark – Power System Stability: Synchronous Machines, Dover Publications Inc., New York, USA, 1968, republication of the book by John Wiley & Sons, Inc., New York, USA, 1956. [2] Paul C. Krause – Analysis of Electric Machinery, McGraw-Hill International Editions, Singapore, 1987. [3] Murray R. Spiegel – Manual de Fórmulas e Tabelas Matemáticas, Coleção Schaum, McGraw-Hill do Brasil Ltda., São Paulo, SP, 1973 [4] Prabha Kundur – Power System Stability and Control, EPRI Power System Engineering Series, McGraw-Hill, Inc., New York, USA, 1994. [5] P. M. Anderson, B. L. Agrawal, J. E. Van Ness – Subsynchronous Resonance in Power Systems, IEEE Press, New York, USA, 1990. [6] Gilbert Strang – Introduction to Applied Mathematics, Wellesley-Cambridge Press, Massachusetts, USA, 1986. [7] W. H. Press, B. P. Flannery, S. A. Teukolsky & W. T. Vetterling – Numerical Recipes – The Art of Scientific Computing, Cambridge University Press, Cambridge, UK, 1986. [8] J. Arrillaga, C. P. Arnold & B. J. Harker – Computer Modelling of Electrical Power Systems, John Wiley & Sons, Chichester, UK, 1983. [9] Katsuhiko Ogata – Engenharia de Controle Moderno, 2a edição, Prentice-Hall do Brasil, Rio de Janeiro, RJ, 1993. [10] Pierre R. Bélanger – Control Engineering: a Modern Approach, Saunders College Publishing, Harcourt Brace and Co., Fort Worth, USA, 1995. [11] J. H. Wilkinson – The Algebraic Eigenvalue Problem, Oxford Science Publications, Clarendon Press, Oxford, UK, 1965. [12] IEEE Committee Report – “Excitation System Models for Power System Stability Studies”, IEEE Trans. on Power Apparatus and Systems, vol. PAS-100, pp. 494-509, February, 1981. [13] IEEE Recommended Practice for Excitation System Models for Power System Stability Studies, IEEE Standard 421.5-1992. [14] F. P. De Mello – Dinâmica das Máquinas Elétricas II, Edições UFSM, Santa Maria, RS, 1983. [15] A. L. Farias & R. Jovita, “Limitações Operativas Causadas por Auto-Excitación em Máquinas sincronías,” Anais do XVI SNPTEE, Campinas, SP, 2002. [16] X. Vieira Filho, “Operação de Sistemas de Potência com Controle Automático de Geração,” Editora Campus, 1984. [17] Manual do Programa ANATEM (Análise de transitorios Eletromecânicos) do CEPEL. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XII-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 [18] J. P. Paul, J. Y. Léost & J. M. Tesseron – “Survey of the Secondary Voltage Control in France: Present Realization and Investigations”, IEEE Transactions on Power Systems, Vol. 2, No. 2, pp. 505-511, May 1987. [19] S. Corsi, P. Marannino, N. Losignore, G. Moreschini & G. Piccini – “Coordination between the Reactive Power Scheduling Function and the Hierarchical Voltage Control of the EHV ENEL System,” IEEE Transactions on Power Systems, Vol. 10, No. 2, pp. 686-694, May 1995. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XII-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 XIII. APENDICE 3 XIII.1 Ejemplo de Inestabilidad de Tensión en la Interconexión NorteSur Este apéndice muestra una análisis dinámico del fenómeno de inestabilidad de tensión en el sistema interconectado Norte/Sur brasileño. El análisis dinámico consideró la configuración completa del sistema para el año de 2001 en las condiciones de carga media y leve. Para análisis del comportamiento dinámico del sistema, con objetivo de detectar la posibilidad de ocurrencia de colapso de tensión en la Interconexión Norte/Sur, fueron simuladas ocurrencias que resultan en desbalance carga/geración y tendencia a provocar aumento de cargamento en la interconexión. Las simulaciones fueron hechas con el programa Anatem del Cepel [17]. Los parámetros de los generadores y sus sistemas de control son aquellos existentes en el banco de ensayos del ONS. A.1 Carga media - Intercambio Norte/Sur = 700MW – curto-circuito fase-tierra en Cachoeira Paulista, eliminado por la apertura de un circuito Cachoeira Paulista – Adrianópolis 500kV. Los resultados de esta simulación están presentados en las Figuras 1.a – 1.g. Ese defecto no corresponde a un desbalance carga/geración importante y fue simulado para demostrar que en este caso no existe riesgo de ocurrencia de colapso de tensión en la interconexión. En relación a los resultados obtenidos conviene resaltar los siguientes aspectos: El sistema presenta un comportamiento estable y bien amortiguado. Fase a la característica de la interconexión, constituida de largas líneas de transmisión, interconectado dos grandes subsistemas (Norte/Noreste e Sul/Sudeste/Centro Oeste), se observa oscilaciones de baja frecuencia, de la orden de 0,2 Hz, mas fácil que se visualizará en la figura, que presenta las oscilaciones de potencia activa en la interconexión. Conviene esclarecer que oscilaciones de baja frecuencia (0,2 Hz) son poco frecuentes en los sistemas eléctricos, especialmente aquellos fuertemente ligados. En los estudios de planificación, que definieron los equipamientos de la Interconexión Norte/Sur, fueron observadas oscilaciones de baja frecuencia y sin amortiguamiento. La solución para el problema fue el empleo del TCSC (Thyristor Controlled Series Compensator). Título ilustrativo, en la Figura a, están presentados dos curvas con el comportamiento del flujo en la Interconexión Norte/Sur, con y sin la utilización del TCSC. La curva en rojo, con menor amortiguamiento, corresponde a la simulación sin el TCSC. El defecto simulado no presenta un desbalance carga/geración significativo y, por lo tanto, el cargamento de la Interconexión Norte/Sur es poco afectado, conforme se puede observar en la Figura 1.a. Consecuentemente, también son poco significativas las variaciones de tensión y de potencia reactiva, conforme mostrado en las Figuras 1.b – 1.g. 3 Los resultados de este Apéendice fueron obtenidos en un Projecto de Fin de Curso por el hy ingeniero Leonardo Santos Ferreira. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-1 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 1.a – Potencia Activa en la Interconexión Norte-Sur (MW) Figura 1.b – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-2 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 1.c – Tensiones (pu) Figura 1.d – Tensiones (pu) Figura 1.e – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-3 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 1.f – Potencia Reactiva de Serra da Mesa (Mvar) Figura 1.g – Potencia Reactiva de Emperatriz (Mvar) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-4 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 A.2 Carga media - Intercambio Norte/Sur = 700MW – corto-circuito fase-tierra en Itaberá, eliminado por la apertura de un circuito Itaberá – Tijuco Preto y pérdida de un generador de Itaipu. Los resultados de esta simulación están presentados en las Figuras 2.a a 2.g. Conviene enfatizar que en el sistema de 750kV de Itaipu, existe un esquema de protección que puede desligar un, dos o tres generadores de la planta, cuando tendrá desconexión de las líneas de 750kV. Esa protección tiene como objetivo evitar la pérdida de sincronismo de las plantas. Los resultados de la simulación son discutidos a seguir: Ese defecto es más severo que aquel aplicado en Cachoeira Paulista y quedan más destacadas las oscilaciones con frecuencia de la orden de 0,2 Hz. Sin embargo, estas oscilaciones están bien amortiguadas. Se puede observar que el flujo de potencia activa en la interconexión (Figura 2.a ) oscila, alcanzando casi 1000MW, y estabilizando en 800MW. Las tensiones del sistema caen en el periodo en que la potencia activa en la interconexión está subiendo para próximo de 1000MW, pero las reducciones de tensión son relativamente débiles. La potencia reactiva de la planta de Serra de la Mesa, en el mismo período apuntado anteriormente, sube para 450Mvar, se estabiliza un poco arriba del valor inicial. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-5 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 2.a – Potencia Activa en la Interconexión Norte-Sur (MW) Figura 2.b – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-6 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 2.c – Tensiones (pu) Figura 2.d – Tensiones (pu) Figura 2.e – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-7 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 2.f – Potencia Reactiva de Serra de la Mesa (Mvar) Figura 2.g – Potencia Reactiva de Emperatriz (Mvar) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-8 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 A.3 Carga media - Intercambio Norte/Sur = 700MW – corto-circuito fase-tierra en Itaberá, eliminado por la apertura de un circuito Itaberá – Tijuco Preto y perdida de dos generadores de Itaipu. Los resultados para esa simulación están presentados en las Figuras 3.a a 3.g. También se procuro mostrar el efecto de la acción del TCSC. En relación a los resultados obtenidos se puede resaltar: En la Figura 3.a están presentados los flujos de potencia activa en la interconexión con y sin el TCSC, quedando mas acentuada la diferencia en el amortiguamiento de las oscilaciones cuando se considera el equipamiento. Aun en la Figura 3.a, se puede observar que el flujo de potencia activa en la interconexión se excede 1200MW, si se estabiliza después de 1000MW. Naturalmente, cuanto mayor es el desbalance carga/geración, mayor será la contribución de los sistemas Norte e Nordeste a través de la interconexión, correspondiendo a la acción primaria de los reguladores de velocidad de los generadores de los sistemas N-NE. Con relación a las tensiones del sistema, se observa una mayor reducción en relación al caso anterior. En los sistemas Norte y Noreste, el problema aun no es grave, con las tensiones alcanzando un mínimo de 1,00 pu, conforme esta mostrado en las Figuras 3.b y 3.c. Sin embargo, en las barras de diapositivas de la interconexión y, principalmente, en Samambaia, las tensiones caen bastante, llegando casi a 0,80 pu, conforme es mostrado en las Figuras 3.d e 3.e. Fase a la caída de tensión del sistema, provocada por el aumento de intercambio en la interconexión, se observa una expresiva variación de potencia reactiva en Serra de la Mesa y Emperatriz, conforme es mostrado en las Figuras 3.f y 3.g. Serra de la Mesa llega a generar cerca de 1300Mvar, mientras su capacidad máxima es de 570Mvar. Conviene recordar que no fueron modelados los limitadores de corriente de campo de las máquinas, y que su actuación agravaría aun mas el comportamiento de las tensiones. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-9 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 3.a – Potencia Activa en la Interconexión Norte-Sur (MW) Figura 3.b – Tensiones (pu) Figura 3.c – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-10 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 3.d – Tensiones (pu) Figura 3.e – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-11 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 3.f – Potencia Reactiva de Serra de la Mesa (Mvar) Figura 3.g – Potencia Reactiva de Emperatriz (Mvar) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-12 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 A.4 Carga media - Intercambio Norte/Sur = 700MW – corto-circuito fase-tierra en Itaberá, eliminado para la abertura de un circuito de Itaberá – Tijuco Preto y perdida de tres generadores de Itaipu. Los resultados referentes a esta simulación están presentados en las Figuras 4.a a 4.g, en relación a los cuales poden ser destacados los siguientes puntos: después de la aplicación del defecto y, con la desconexión de tres generadores en Itaipu, o flujo en la interconexión aumenta. Eso, asociado al aumento de contribución de otras plantas del sistema Sur / sudeste, provocan caídas de tensión en el sistema de transmisión mas acentuadas que las verificadas en el caso de desconexión de dos generadores. Con eso, el perfil de tensión en barras a lo largo de la Interconexión Norte/Sur, cae rápidamente. En especial, las tensiones en la región de Samambaia y Bandeirantes presentan nítidamente las tendencias de colapso de tensión, conforme es mostrado en la Figura 4.e. Por los resultados de la Figura 4.f, se observa que la planta de Sierra de la Mesa aumenta rápidamente su generación de potencia reactiva, en el sentido de intentar mantener el perfil de tensión del sistema, ultrapasando significativamente su capacidad máxima, que es de 570 Mvar. los resultados de la simulación pierden la validez después de al ocurrencia del colapso de tensión (en torno de los 3s). En ese caso, ocurriría actuación de esquemas de protección desconcertando líneas y aislar los sistemas. Se debe destacar que, en sistema Norte/Noreste, conforme mostrado en las Figuras 4.b y 4.c, las caídas de tensión son menos acentuadas, visto que, para ese tipo de defecto, el problema se sitúa en la interconexión entre Emperatriz y Itumbiara, que puede ser considerado un acoplamiento débil, no disponiendo de dispositivos de control automático de tensión para soportar aumentos bruscos de cargamento. Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-13 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 4.a – Potencia Activa en la Interconexión Norte-Sur (MW) Figura 4.b – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-14 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 4.c – Tensiones (pu) Figura 4.d – Tensiones (pu) Figura 4.e – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-15 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 4.f – Potencia reactiva de Serra de la Mesa (Mvar) Figura 4.g – Potencia Reactiva de Emperatriz (Mvar) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-16 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 A.5 Carga leve - Intercambio Norte/Sur = 700MW – corto-circuito fase-tierra en Itaberá, eliminado por la apertura de un circuito Itaberá – Tijuco Preto y perdida de dos generadores en Itaipu. Los resultados referentes a esta simulación están presentados en las Figuras 5.a a 5.g, en relación a los cuales pueden ser destacados los siguientes puntos: Para operación en carga leve el problema es más grave, ocurriendo el colapso de la misma tensión para perdida de dos generadores en Itaipu. Conviene destacar que, en la carga leve, aunque el cargamento del sistema sea menor, el cargamento de la interconexión fue considerado igual al de la carga media. Por otro lado, por las características de los sistemas interconectados, se considero una reducción mayor de generadores sincronizados a la red, en el sistema Sur / sudeste, que en el sistema Norte/Noreste. Así, para un mismo temblor (perdida de dos generadores), ocurre una mayor contribución del sistema Norte/Noreste en la carga leve en la que la carga pesada. Consecuentemente, hay una mayor tendencia de aumentar el cargamento en la Interconexión Norte/Sur, con agravamiento de los problemas de baja tensión, conforme mostrado en las Figuras 5.d y 5.e. De la misma forma que en el caso anterior, los resultados pierden valides después de la ocurrencia del colapso de tensión (en torno de 3s). Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-17 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 5.a – Potencia Activa en la Interconexión Norte-Sur (MW) Figura 5.b – Tensiones (pu) Figura 5.c – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-18 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 5.d – Tensiones (pu) Figura 5.e – Tensiones (pu) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-19 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COPPE – Programa de Engenharia Elétrica Prof. Glauco Nery Taranto, Ph.D. [email protected] Centro de Tecnologia – Ilha do Fundão 21945-970 – Rio de Janeiro, RJ - Brasil tel. 2562-8615 fax: +2562-8628 Figura 5.f – Potencia Reactiva de Serra da Mesa (Mvar) Figura 5.g – Potencia Reactiva de Emperatriz (Mvar) Curso LIMA, PERÚ – 2003 Estabilidade Eletromecânica de Sistemas de Potência XIII-20
Baixar