http://dx.doi.org/10.5540/DINCON.2011.001.1.0058 227 FLUXO DE CARGA DESACOPLADO RÁPIDO CONTINUADO PARA DETERMINAÇÃO DO PONTO DE MÁXIMO CARREGAMENTO DE SISTEMAS ELÉTRICOS DE POTÊNCIA PARTE I: DESENVOLVIMENTO TEÓRICO Elisabete de Mello Magalhães 1, Alfredo Bonini Neto 2, Dilson Amancio Alves 3 1 2 UNESP - Departamento de Engenharia Elétrica, Ilha Solteira – Brasil, [email protected] UNESP - Departamento de Engenharia Elétrica, Ilha Solteira – Brasil, elisabete.magalhã[email protected] 3 UNESP - Departamento de Engenharia Elétrica, Ilha Solteira – Brasil, [email protected] Resumo: O método de fluxo de carga desacoplado rápido (FCDR) é considerado inadequado para a obtenção do ponto de máximo carregamento de sistemas elétricos de potência. No entanto, neste trabalho mostra-se, que com pequenas modificações, a versão BX do fluxo de carga desacoplado rápido torna-se adequada para a obtenção desse ponto. Palavras-Chave: Fluxo de carga desacoplado rápido, curva P-V, método da continuação. 1. INTRODUÇÃO A crescente preocupação com os problemas relacionados com a instabilidade estática de tensão se deve à sua importância para o planejamento e a operação dos sistemas elétricos de potência. Fatores como o crescente aumento da demanda de energia, a transferência de elevadas quantidades de potência para atender o consumo, aliados as exigências econômicas e ambientais têm, em geral, levado os sistemas a operarem próximos de seus limites, com reduzidas margens de carregamento, ou seja, os sistemas tornam-se vulneráveis a possíveis ocorrências de instabilidade de tensão. A margem de estabilidade é definida como o maior aumento de carga que o sistema pode ter, sem provocar o colapso de tensão. O levantamento da curva P-V é considerado o procedimento mais adequado para a determinação das margens de estabilidade estática de tensão. Assim, entre os objetivos fundamentais dos métodos de análise da estabilidade estática de tensão está a obtenção do ponto de máximo carregamento (PMC) dos sistemas de potência. Os métodos mais utilizados para o traçado das curvas PV são o fluxo de carga convencional (FC), e o fluxo de carga continuado (FCC) que associa o método de Newton a um método da continuação [1]. O primeiro, considerado robusto, converge quase sempre e com poucas iterações, mas devido à singularidade da matriz Jacobiana no PMC, este não possibilita precisar o PMC devido aos problemas numéricos que surgem em torno deste. Para carregamentos maiores que o do PMC, as equações de FC não têm solução. Por outro lado, o FCC [1-11] composto por quatro elementos básicos (o passo preditor, o passo corretor, um controle de passo e a parametrização) procura garantir através da parametrização, a não singularidade da matriz Jacobina (J) no PMC e com isso, a eliminação dos problemas numéricos que ocorrem em torno deste. Assim, possibilita-se que os mesmo algoritmos, com precisão simples, sejam usados tanto na vizinhança quanto no próprio PMC. Dessa forma, o traçado completo do perfil de tensão é efetuado variando automaticamente o valor de um determinado parâmetro do sistema, sem preocupação com as singularidades das equações do fluxo de carga. Em geral, o fluxo de carga usando o método de Newton desacoplado (FCND), derivado do FC convencional e presente na literatura [12], no qual se pode fazer uso de dois algoritmos de resolução o simultâneo e o alternado, apresenta um fraco desempenho para o traçado de curvas PV e falha na obtenção do PMC de sistemas elétricos de potência. Em [13] foi apresentado o fluxo de carga utilizando o método de Newton desacoplado continuado (FCNDC), utilizando o algoritmo alternado de resolução, propiciando a determinação do PMC de sistemas elétricos de potência sem problemas relacionados à singularidade da matriz J. Visando maior rapidez e robustez para o traçado das curvas P-V, surgem os FC desacoplado rápido (FCDR). As simplificações introduzidas na matriz Jacobiana do FC pelo método de Newton deram origem às versões BX e XB do método de FCDR [14]. O amplo uso do método de FC desacoplado rápido convencional, para cálculos de FC, é devido a suas características de velocidade de convergência e pouca necessidade de memória computacional. Em função destas vantagens, sempre há um interesse por parte das concessionárias em usá-lo nos algoritmos em geral e, particularmente, associado ao método da continuação. O intuito é o de reduzir a carga computacional exigida para o traçado das curvas P-V. Em [15] foram apresentados os métodos de FCDR parametrizados, usando Vk ou k, de uma barra k qualquer, ou como parâmetro. Neste trabalho apresenta-se o fluxo de carga desacoplado rápido continuado modificado (FCDRCM) na versão BX [16], a qual consiste na adição de uma equação de reta que passa por um ponto no plano formado pelas variáveis: tensão nodal de uma barra k (Vk) qualquer e o fator de carregamento (). O uso dessa técnica elimina a necessidade de troca de parâmetro ao longo do traçado da curva P-V, e amplia o grupo das variáveis de tensão que podem ser 228 FLUXO DE CARGA DESACOPLADO RÁPIDO CONTINUADO PARA DETERMINAÇÃO DO PONTO DE MÁXIMO CARREGAMENTO DE SISTEMAS ELÉTRICOS DE POTÊNCIA PARTE I: DESENVOLVIMENTO TEÓRICO Elisabete de Mello Magalhães, Alfredo Bonini Neto, Dilson Amancio Alves adotadas para a composição da equação da reta. Nesta metodologia o coeficiente angular da reta () será utilizado como parâmetro. O FCDRCM é utilizado no traçado das curvas P-V dos sistemas: IEEE 118 e 300 barras, e duas configurações do sistema Sul-Suldeste Brasileiro: de 638 e 787 barras. Os resultados e discussões, que são apresentados na parte II desse trabalho [17], comprovam a eficiência do método desacoplado proposto na obtenção do PMC. 2. FLUXO DE CARGA CONTINUADO Nos estudos de estabilidade estática de tensão, o sistema elétrico de potência é representado pelo seguinte conjunto de equações de FC: G ( θ , V , λ ) 0 , ou ΔP ( θ , V , λ ) λ P esp P ( θ , V ) 0 (1) ΔQ ( θ , V , λ ) λ Q esp Q ( θ , V ) 0 sendo o fator de carregamento, V o vetor das magnitudes das tensões nodais e o vetor do ângulo das tensões nodais, Pesp o vetor da diferença entre as potências ativas gerada (Pgesp) e consumida (Pcesp) para as barras de carga (PQ) e de geração (PV), e Qesp o vetor da diferença entre as potências reativas gerada (Qgesp) e consumida (Qcesp) para as barras de carga PQ. ∆P e ∆Q são denominados resíduos (mismatches) de potência ativa e reativa, respectivamente, P(θ,V) e Q(θ,V) corresponde as equações não lineares de potência ativa e reativa para cálculo dos vetores V e θ. Para uma barra k qualquer, Pk(θ,V) e Qk(θ,V) são dados por: Pk , V G k Vk2 Vk Vl g kl cosθ kl b kl senθ kl , k PQ, PV l k Q k , V B k Vk2 Vk Vl g kl senθ kl b kl cosθ kl , k PQ, l k sendo k o conjunto de todas as barras diretamente conectadas à barra k, (Yk,k=Gk+jBk) o elemento da diagonal k da matriz admitância nodal (Y), e (Ykl=gkl+jbkl) à admitância série do ramo que conecta as barras k e l. Após a definição de um padrão de variação da carga e de uma estratégia de despacho da geração, realiza-se o traçado da curva P-V por meio de sucessivas soluções de (1) utilizando um FC. Nesse procedimento, P e Q, são as variáveis independentes, enquanto que V e θ, excetuando V e θ da barra referência e as V das barras PV, são as variáveis dependentes. Com a inclusão de como variável em (1), o sistema resulta em n equações e n+1 incógnitas. Assim, qualquer uma das n+1 incógnitas pode ser definida como parâmetro. No caso em que é tratado como variável independente no processo iterativo de Newton, isto é, quando ele for usado como parâmetro e seu valor for prefixado, a linearização da equação (1) de acordo com o método de Newton fornece: P H N Q M L V J V (2) onde as submatrizes que compõem a matriz Jacobiana J são representadas por H=P/, N=P/V, M=Q/ e L=Q/V. P e Q correspondem aos mismatches de potências ativa e reativa, respectivamente, enquanto V e correspondem às correções das magnitudes e ângulos das tensões. A parametrização fornece uma forma de identificar cada solução ao longo da trajetória a ser obtida. O PMC é obtido, p.ex., através do incremento gradual de , adotado como parâmetro, a partir do caso base (=1) até um valor para o qual não mais se obtenha solução (o processo iterativo do FC não converge). Em geral, nesse ponto, realiza-se um controle de passo que consiste numa simples redução no incremento (no passo) de e a nova solução é obtida a partir da última solução convergida. O PMC é considerado como sendo o último ponto convergido, após sucessivas repetições desse procedimento. Entretanto, conforme já comentado, a divergência do FC é consequência da singularidade da matriz J de (1) no PMC e, portanto, não será possível determiná-lo precisamente. Como visto anteriormente diversos autores propuseram diferentes implementações dos conhecidos métodos da continuação para superar as dificuldades numéricas introduzidas pela singularidade da matriz J e possibilitar a determinação do PMC. Entre os muitos métodos descritos na literatura, o mais amplamente utilizado consiste de quatro elementos básicos: um procedimento de parametrização, um passo preditor, um controle de passo e um passo corretor. 3. FLUXO DE CARGA PARAMETRIZADO POR Vk CONTINUADO Para se superar as dificuldades numéricas devidas à singularidade de J no PMC, é necessária uma mudança de parâmetro de forma que a nova matriz Jacobiana não apresente singularidade no PMC, e de preferência em toda sua vizinhança. De acordo com [18], a curva P-V completa pode ser obtida considerando a magnitude da tensão como parâmetro, sendo considerado como variável dependente. Em [5] mostrou-se que os ângulos das tensões também podem ser escolhidos como parâmetro. Conforme ilustra a figura 1, na curva P-V a tensão está continuamente decrescendo à medida que o carregamento se aproxima do PMC. Assim, a tensão de uma determinada barra poderia ser prefixada e a respectiva solução determinada. Para alcançar este objetivo, conforme apresentado na [19] foi proposto a utilização da magnitude de tensão de uma barra k, Vk, como parâmetro, e nesta condição a aplicação do método de Newton à equação (1) resultaria em: P Q H M H M P esp V' L1 Q esp N' V' J V V' L' N1 (3) onde o vetor V' não contém o elemento Vk, o qual é substituído por . As submatrizes N' e L' diferem das N e L da equação (2) apenas na coluna k na qual as derivadas de P e Q com relação à Vk foram substituídas pelas derivadas 229 Tabela 1. Características dos sistemas SUL/SULDESTE. Sistema Barras Circuitos Transformadores Carga Geração 638 540 98 1221 55 787 675 112 1309 86 Os métodos FCDR parametrizados apresentados em [19] apresentaram um bom desempenho para os sistemas teste do IEEE analisados: de 14, 30, 57 e 118 barras. Por outro lado, quando avaliados para o traçado das curvas P-V de sistemas como o IEEE-300 barras e os apresentados na tabela 1, apresentaram um fraco desempenho, falhando não só na obtenção da curva P-V, mas em algumas situações até mesmo para o caso base. Nesse sentido nesse trabalho são propostas pequenas modificações visando possibilitar o traçado das curvas P-V para sistemas com as características acima mencionadas. 4. FLUXO DE CARGA DESACOPLADO RÁPIDO CONTINUADO Na metodologia proposta à técnica de parametrização utilizada é desenvolvida a partir da técnica de parametrização geométrica apresentada em [13]. Na técnica proposta acrescenta-se a (1), uma equação de reta que passa por um ponto escolhido (0, Vk0) no plano formado pelas variáveis fator de carregamento () e magnitude da tensão nodal (Vk) de uma barra k qualquer: R(Vk, , )=( Vk1- Vk0)- ( 1-0,)=0 (4) Obtém-se assim o seguinte sistema de equações: Δ P (θ, V , λ)=λP esp - P(θ, V )=0 Δ Q (θ, V , λ)=λQ esp -Q(θ, V )=0 (5) Δ R (Vk , λ)=(Vk -Vk0 )-α(λ-λ 0 )=0 sendo o coeficiente angular da reta. Com a adição de mais uma equação (R), pode ser tratado como uma variável dependente e é considerada uma variável independente, ou seja, escolhida como parâmetro da continuação (seu valor é prefixado). Assim, o número de incógnitas é igual ao de equações, isto é, a condição necessária para que se tenha solução é atendida, desde que a matriz tenha posto máximo (seja não singular). Observa-se que a prefixação do valor de corresponde à técnica de previsão trivial ou polinomial modificada de ordem zero [1]; [6]. Conforme apresentado em [13], calcula-se o valor inicial de 1 a partir das coordenadas de um ponto inicial escolhido O (0, Vk0) e dos seus respectivos valores obtidos para um caso base P (1=1, Vk1), o que pode ser observado na figura 1, 1=( Vk1- Vk0)/( 1-0). caso base P (λ1, V 141 ) 1 Tensão [p.u.] com relação à nova variável . Procedendo desta forma a nova matriz Jacobiana JV não apresentará singularidade, resultando num método mais robusto não só no ponto em questão, mas ao longo de toda a curva. Um ponto importante na avaliação dos métodos de fluxo de carga desenvolvidos é a verificação dos seus desempenhos durante a simulação de sistemas reais de grande porte, tais como é o caso das duas configurações do sistema Sul-Suldeste Brasileiro, a configuração de 638 barras e a de 787 barras. Suas principais características são apresentadas na tabela 1. 0.8 PMC 0.6 0.4 α1 ponto escolhido 0.2 0 O (λ0, V 140 ) 0 0.5 1 1.5 Fator de carregamento, λ 2 Fig. 1. Reta inicial que passa por um ponto escolhido O (0, Vk0) e o ponto do caso base P (1, Vk1) no plano λ- Vk. A partir do sistema de equações (5), a versão BX para o FCDRCM passa a ser: B' P (6) V Q B "m R em que: G B" Q iesp i Piesp B "m Bi e k (7) onde B″ é a matriz da versão BX do FCDR convencional [12]; [14] ; [19]. Gi e Bi são os elementos da diagonal das matrizes de condutância e suceptância nodal correspondente as barras PQ (i {barras PQ}), ek é um vetor com todos elementos nulos, exceto na coluna em que a variável será escolhida para determinar o plano em que se encontra o feixe de retas para o traçado da curva P-V e α que é o coeficiente angular da reta e será o parâmetro da continuação. 4.1. Procedimento Geral para Traçado da Curva P-V Em função das análises realizadas definiu-se o seguinte procedimento geral para o traçado da curva -Vk: 230 FLUXO DE CARGA DESACOPLADO RÁPIDO CONTINUADO PARA DETERMINAÇÃO DO PONTO DE MÁXIMO CARREGAMENTO DE SISTEMAS ELÉTRICOS DE POTÊNCIA PARTE I: DESENVOLVIMENTO TEÓRICO Elisabete de Mello Magalhães, Alfredo Bonini Neto, Dilson Amancio Alves 1. Obtenha o ponto "P" para o caso base utilizando o FC convencional e calcule o correspondente valor do coeficiente angular da reta (1) que passa pelo ponto escolhido "O"(Vk0=0,0 p.u., 0=0,0), e pelo ponto "P"(1=1, Vk1); 2. Obtenha os próximos pontos da curva -Vk aumentando gradualmente o valor de , i+1=i + com =0,05; 3. O PMC foi encontrado então pare o processo, caso contrário retorne para o passo (1). As coordenadas iniciais do centro do feixe de retas, ponto "O", foram escolhidas de modo a possibilitar o traçado da curva P-V de qualquer sistema desejado. As justificativas para sua escolha podem ser encontradas em [13]. Para esta metodologia foram utilizadas as coordenadas (0, 0) para o ponto “O”. Outro ponto importante do FCDRCM é manter o parâmetro α constante durante o traçado da curva P-V. A constatação de que o PMC foi alcançado é feita com base na troca de sinal da variável . 4. CONCLUSÃO Este trabalho apresentou o equacionamento do FCDRCM para o traçado completo da curva P-V utilizando como parâmetro o coeficiente angular da reta que passa por um ponto no plano formado pelas variáveis: tensão nodal de uma barra k qualquer e o fator de carregamento. O uso dessa técnica elimina a necessidade de troca de parâmetro ao longo do traçado da curva P-V, e amplia o grupo das variáveis de tensão que podem ser adotadas para a composição da equação da reta. AGRADECIMENTOS Os autores agradecem o apoio do CNPq (Conselho Nacional de Desenvolvimento Científico e Tecnológico), da CAPES (Coordenação de Aperfeiçoamento de Pessoal de Nível Superior) e a FAPESP (Fundação de Amparo à Pesquisa do Estado de São Paulo). REFERÊNCIAS [1] R. Seydel, "From Equilibrium to Chaos: Practical Bifurcation and Stability Analysis", 2ª ed., New York: Springer-Verlag, p. 407, 1994. [2] P. Kundur, “Power System Stability and Control”. New York: McGraw-Hill, 1993, 1176p. [3] T. Van Cutsen, e C. Vournas. “Voltage Stability of Eletric Power System”, Kluwer Academic Publishers, Boston, 1998. [4]DOI C.A.Cañizares,F. L. Alvarado, C. L. DeMARCO, I. Dobson, W. F. Long, “Point of Collapse Methods Applied to AC/DC Power Systems”. IEEE Trans. on Power Systems, v. 7, n. 2, p. 673-683, 1992. [5]DOI V.A.Ajjarapu, C.Christy, “The Continuation Power Flow: a Tool for Steady State Voltage Stability Analysis”. IEEE Trans. on Power Systems, v. 7, n. 1, 1992, p.416-423. [6]DOI H.D.Chiang, A. Flueck, K.S. Shah, N. Balu, “CPFLOW: A Pratical Tool for Tracing Power System Steady State Stationary Behavior Due to Load and Generation Variations”. IEEE Trans. on Power Systems, v.10, n. 2, p.623-634, 1995. [7] B. Long, V. A. Ajjarapu, “Critical review of the applications of homotopy and continuation methods to power system analysis”. 28 th NAPS Conf., MIT., 1996, p.8-15. [8]DOI K.Iba, H.Suzuki, M. Egawa, T. Watanabe, “Calculation of Critical Loading Condition with Nose Curve Using Homotopy Continuation Method”. IEEE Trans. on Power Systems, v. 6, n. 2, p. 585-593, 1991. [9] Y. Mansour, “Suggested Techniques for Voltage Stability Analisys”. IEEE Power Engineering Society, 142 p., 1993. [10]DOI D. A. Alves, L.C.P. da Silva, C. A. Castro, V. F. da Costa, “Study of Alternative Schemes for the Parameterization Step of the Continuation Power Flow Method Based on Physical Parameters-Part-I: Mathematical Modeling, Electric Power Components and Systems”, v. 31, n. 12, December, pp. 1151-1166, 2003. [11]DOI D.A.Alves, L. C. P.da Silva, C.A. Castro, V.F. Costa, “Esquemas Alternativos para o passo de parametrização do método da continuação baseados em parâmetros físicos”. Controle & Automação, Campinas, SBA, v. 13, p. 275-289, 2002. [12] A. J. Monticelli, “Fluxo de Carga em redes de Energia Elétrica”, São Paulo. Editora Blücher Ltda, 1983. [13] E. M. Magalhães; A. Bonini Neto; D. A. Alves, “Obtenção do Ponto de Máximo Carregamento de Sistemas Elétricos de Potência Utilizando o Método Desacoplado de Newton”. In: IEEE/PES T&D 2010 Transmission & Distribution Latin América, São Paulo. p. 1-8, 2010. [14]DOI B.StottO. Alsac, “Fast Decoupled Load Flow”, IEEE Trans. on PAS, vol. 93, pp. 859-869, 1974. [15]DOI D. A.Alves, L. C. P.da Silva, C.A. Castro,V.F. Costa, “Parameterized Fast Decoupled Load Flow for Tracing the Power Systems Bifurcation Diagrams”. Proceedings of the IEEE PES SummerMeeting, Canada, pp.708-713, 1999. [16] A. Monticelli, A. Garcia, e O. R. Saavedra, “Fast Decoupled Load Flow”: Hypothesis, Derivations and Testing, IEEE Trans. on Power Systems, Vol. 5, No 4, Novembro, pp. 1425-1431, 1990. [17] E. M. Magalhães; A. B. Neto; D. A. Alves. Fluxo de Carga Desacoplado Rápido Continuado para Determinação do Ponto de Máximo Carregamento de Sistemas Elétricos de Potência Parte I: 10th Brazilian Desenvolvimento Teórico, In: Conference on Dynamics, Control and Applications_DINCON'2011. Águas de Lindóia (SP), Setembro 2011 (Editoração Eletrônica – CD: 04 pp.). [18]DOI L. D. Arya, H.K. Verma, “A Method for Tracing PV Curve for Voltage Stability Analysis with Voltage Dependent Loads”, Electric Machines and Power Systems, Vol. 24, pp.583-596, 1996. [19]DOI D. A. Alves, L. C. P.da Silva, C.A. Castro, V. F. Costa, “Determinação do Ponto de Máximo Carregamento de Sistemas de Potência Utilizando o Fluxo de Carga Desacoplado Rápido Parametrizado”. SBA. Sociedade Brasileira de Automática, Brasil, v. 14, n. 02, p. 151-165, 2003.
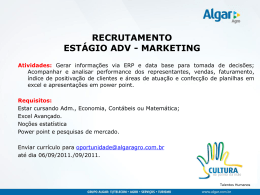
Baixar