UNIVERSIDADE FEDERAL DO PARÁ
INSTITUTO DE TECNOLOGIA
FACULDADE DE ENGENHARIA MECÂNICA
ROBERTA TAMARA DA COSTA NERY / 03021003801
DESENVOLVIMENTO DE UMA FERRAMENTA VIRTUAL PARA ANÁLISE DE
VIBRAÇÃO EM MÁQUINA ROTATIVA: APLICAÇÃO EM UMA BANCADA
DIDÁTICA
BELÉM
2008
ROBERTA TAMARA DA COSTA NERY / 03021003801
DESENVOLVIMENTO DE UMA FERRAMENTA VIRTUAL PARA ANÁLISE DE
VIBRAÇÃO EM MÁQUINA ROTATIVA: APLICAÇÃO EM UMA BANCADA
DIDÁTICA
Trabalho de Conclusão de Curso apresentado à Faculdade de
Engenharia Mecânica do Instituto de Tecnologia da
Universidade Federal do Pará para obtenção do grau de
Engenheiro Mecânico.
Orientador: Prof. Dr. Newton Sure Soeiro
BELÉM
2008
ROBERTA TAMARA DA COSTA NERY / 03021003801
DESENVOLVIMENTO DE UMA FERRAMENTA VIRTUAL PARA ANÁLISE DE
VIBRAÇÃO EM MÁQUINA ROTATIVA: APLICAÇÃO EM UMA BANCADA
DIDÁTICA
Trabalho de Conclusão de Curso apresentado para
obtenção do grau de Engenheiro Mecânico pela
Universidade Federal do Pará. Submetido à banca
examinadora do Colegiado constituída pelos
MEMBROS:
____________________________________________
Prof. Dr. Newton Sure Soeiro (Orientador)
____________________________________________
Prof. Dr. Alexandre Luiz Amarante Mesquita
(Membro)
____________________________________________
Prof. Walter dos Santos Sousa (Membro)
____________________________________________
Engª. Keliene Maria Sousa de Jesus (Convidada
Externa)
Julgado em: ____ de ______________ de 2008
Conceito: __________________
BELÉM
2008
Aos meus queridos pais, Jane da Costa Nery e Álvaro
Celso de Oliveira Nery, que sempre me apoiaram.
AGRADECIMENTOS
Primeiramente, a Deus por estar sempre presente no meu coração, mostrar-me o
melhor caminho e me confortar nos momentos difíceis.
Aos meus queridos pais, Jane da Costa Nery e Álvaro Celso de Oliveira Nery, por
todo amor, dedicação e esforço para que eu tivesse a oportunidade de estudar e realizar este
sonho.
Ao meu irmão Rodrigo Fabrício da Costa Nery pelo incentivo.
Ao meu namorado e colega de turma Otávio Nascimento de Oliveira Neto pelo amor e
companheirismo, sempre presente e disposto a me ajudar.
Ao professor Newton Sure Soeiro, pela orientação neste trabalho e, principalmente,
por ter me dado a oportunidade de fazer parte do Grupo de Vibrações e Acústica (GVA), onde
pude complementar minha formação acadêmica.
Aos meus amigos do GVA, professor Gustavo de Melo, Keliene Sousa, Diana Moraes,
Juliana Vera, Alan do Vale, Carlos Cordeiro, Walter Sousa, Alexandre Sá, Márcio Mafra,
Erlison Alves, Adriano da Silva, Fábio Setúbal e Helder Cardoso.
Aos meus amigos, engenheiros eletricistas, Anderson Sena e Roger da Silva, sempre
dispostos a me ensinar e esclarecer dúvidas sobre o Programa LabVIEW.
Ao mecânico Odilon Oliveira Silva, do Laboratório de Engenharia Mecânica,
fundamental na execução da parte prática deste trabalho.
À Eletronorte pelo aprendizado e incentivo financeiro durante o período de projetos de
pesquisa e por ter disponibilizado a bancada didática para este trabalho. Agradeço também ao
professor Alexandre Luiz Amarante Mesquita, coordenador do projeto do qual esta bancada é
produto.
À banca examinadora, pelo convite aceito para avaliação deste trabalho.
Não saber é ruim,
Não querer saber é pior.
PROVÉRBIO CHINÊS
RESUMO
A análise de vibração é um dos mais eficientes métodos de identificação de defeitos em
máquinas, visto que ela se baseia no conhecimento das condições do equipamento, através de
medições periódicas, de forma a evitar paradas inesperadas e substituição desnecessária de
peças. Atualmente, as empresas estão utilizando cada vez mais instrumentação virtual, em
seus departamentos de Engenharia de Manutenção. Uma ferramenta virtual é uma rotina
desenvolvida em uma linguagem de programação, que simula um equipamento real no
computador, pois apresenta botões, controles, LED’s, gráficos e demais funções. Em relação a
máquinas rotativas, pode-se desenvolver várias metodologias de diagnóstico de defeitos, uma
vez que as falhas mais comuns são desbalancemanto de massa, desalinhamento de eixos,
falhas em rolamentos e em engrenagens. Em virtude disso, este trabalho tem como objetivo o
desenvolvimento de uma ferramenta virtual que auxilie no diagnóstico de defeitos, que tem
como base a plataforma LabVIEW. Esta ferramenta é composta por diversas rotinas
responsáveis pela aquisição de sinais de vibração, arquivamento de dados e visualização de
sinais. Além disso, foi elaborado um aplicativo que calcula as freqüências características de
defeitos em rolamentos, considerando que estes são componentes mecânicos utilizados na
maioria das máquinas rotativas e constituem as fontes mais comuns de falhas. Foram
aplicadas também técnicas de análise de sinais, tais como: Nível Global, Fator de Crista,
Curtose, Análise Espectral, Técnica do Envelope e Cepstrum.
Palavras-chave: LabVIEW, Máquinas Rotativas, Manutenção Preditiva, Rolamentos, Análise
de Sinais.
LISTA DE FIGURAS
Figura 3.1 Discrepância entre ER e EPI......................................................................
Figura 3.2 Efeito da força centrífuga no rotor.............................................................
Figura 3.3 Desbalanceamento estático........................................................................
Figura 3.4 a) Binário de desbalanceamento; b) Binário de desbalanceamento
causado por componente externo................................................................................
Figura 3.5 Desbalanceamento quase-estático.............................................................
Figura 3.6 Desbalanceamento dinâmico.....................................................................
Figura 3.7 Forças de reação nos mancais....................................................................
Figura 3.8 Sistema generalizado para alinhamento de eixos......................................
Figura 3.9 Sistema alinhado........................................................................................
Figura 3.10 Desalinhamento paralelo puro.................................................................
Figura 3.11 Desalinhamento angular puro..................................................................
Figura 3.12 Desalinhamento misto.............................................................................
Figura 3.13 Desalinhamento axial...............................................................................
Figura 3.14 Acoplamento danificado por desalinhamento.........................................
Figura 3.15 Tipos de defeitos mais comuns em rolamentos.......................................
Figura 3.16 Pista interna danificada por desalinhamento...........................................
Figura 3.17 Pista interna danificada por fadiga..........................................................
Figura 3.18 Rolamento na forma esquemática...........................................................
Figura 4.1 Filtro ideal..................................................................................................
Figura 4.2 Filtro real...................................................................................................
Figura 4.3 Filtro passa-baixa.......................................................................................
Figura 4.4 Filtro passa-alta..........................................................................................
Figura 4.5 Filtro passa-banda......................................................................................
Figura 4.6 Filtro rejeita-banda.....................................................................................
Figura 4.7 Amostragem de um sinal senoidal.............................................................
Figura 4.8 Sinal que apresenta número inteiro de ciclos............................................
Figura 4.9 FFT do sinal que apresenta número inteiro de ciclos................................
Figura 4.10 Sinal que não apresenta número inteiro de ciclos....................................
Figura 4.11 FFT do sinal que não apresenta número inteiro de ciclos.......................
Figura 4.12 Funções janela.........................................................................................
Figura 4.13 FFT do sinal que não apresenta número inteiro de ciclos, com a janela
Hanning.......................................................................................................................
Figura 5.1 Curva de tendências...................................................................................
Figura 5.2 Princípio do fator de crista.........................................................................
Figura 5.3 Variação típica do fator de crista durante o processo de degradação de
um rolamento..............................................................................................................
Figura 5.4 Esquema do redutor...................................................................................
Figura 5.5 Simulação do sinal de vibração em um redutor.........................................
Figura 5.6 Espectro do sinal.......................................................................................
Figura 5.7 Modulação de amplitude............................................................................
Figura 5.8 Espectro de um sinal modulado.................................................................
Figura 5.9 Esquema da técnica do envelope...............................................................
Figura 5.10 Simulação de defeito em rolamento........................................................
Figura 5.11 Espectro do sinal.....................................................................................
Figura 5.12 Sinal filtrado............................................................................................
Figura 5.13 Espectro do sinal filtrado........................................................................
22
22
24
25
26
27
28
29
29
30
30
31
31
32
34
34
34
37
39
39
39
40
40
40
42
43
43
44
44
45
46
47
48
48
51
51
52
54
54
56
56
57
57
58
Figura 5.14 Envelope do sinal....................................................................................
Figura 5.15 Espectro do envelope..............................................................................
Figura 5.16 Sinal modulado........................................................................................
Figura 5.17 Espectro de potência do sinal..................................................................
Figura 5.18 Cepstrum do sinal....................................................................................
Figura 6.1 Exemplo de programação através de linhas de comando..........................
Figura 6.2 Exemplo de programação através de ícones.............................................
Figura 6.3 Painel frontal..............................................................................................
Figura 6.4 Diagrama de bloco.....................................................................................
Figura 6.5 Ícone..........................................................................................................
Figura 6.6 Conector....................................................................................................
Figura 6.7 Tela inicial do aplicativo...........................................................................
Figura 6.8 Botões da tela inicial.................................................................................
Figura 6.9 Tela de aquisição de sinais........................................................................
Figura 6.10 Controles para configuração de amostragem do sinal.............................
Figura 6.11 Informação do diretório onde o arquivo deve ser salvo..........................
Figura 6.12 Exemplo de arquivo (.lvm) que contém os dados do sinal de vibração..
Figura 6.13 Configuração de filtro.............................................................................
Figura 6.14 Configuração do canal de aquisição........................................................
Figura 6.15 Diagrama de bloco do módulo de aquisição de sinais............................
Figura 6.16 Tela de visualização de sinais em aceleração no domínio do tempo e
da freqüência...............................................................................................................
Figura 6.17 Tela de visualização de sinais em velocidade e deslocamento no
domínio da freqüência.................................................................................................
Figura 6.18 Configuração do sensor...........................................................................
Figura 6.19 Controle que abre o arquivo....................................................................
Figura 6.20 Indicadores de valores de Pico, RMS, Fator de Crista e Curtose do
sinal.............................................................................................................................
Figura 6.21 Diagrama de bloco do módulo de visualização de sinais........................
Figura 6.22 Diagrama de bloco do módulo de visualização de sinais........................
Figura 6.23 Tela de cálculo de freqüências características de defeitos em
rolamentos...................................................................................................................
Figura 6.24 Diagrama de bloco do módulo de cálculo de freqüências
características de defeitos em rolamentos...................................................................
Figura 6.25 Tela da técnica do envelope.....................................................................
Figura 6.26 Configuração de filtro.............................................................................
Figura 6.27 Diagrama de bloco do módulo da técnica do envelope...........................
Figura 6.28 Tela do Cepstrum....................................................................................
Figura 6.29 Diagrama de bloco do módulo do cepstrum...........................................
Figura 6.30 Tela do nível global.................................................................................
Figura 6.31 Tela do fator de crista..............................................................................
Figura 6.32 Tela da curtose.........................................................................................
Figura 6.33 Diagrama de bloco que executa o nível global........................................
Figura 6.34 Diagrama de bloco que executa o fator de crista.....................................
Figura 6.35 Diagrama de bloco que executa a curtose................................................
Figura 7.1 Esquema do sistema de aquisição de sinais de vibração...........................
Figura 7.2 Bancada experimental................................................................................
Figura 7.3 Esquema do acelerômetro piezoelétrico....................................................
Figura 7.4 Acelerômetro piezoelétrico, modelo 784A................................................
Figura 7.5 Bancada experimental com sensores de vibração.....................................
58
58
60
60
60
61
62
63
63
63
63
64
65
66
66
67
67
68
68
68
69
69
70
70
71
71
72
73
73
74
74
75
79
80
81
81
82
82
83
83
84
85
87
87
88
Figura 7.6 Condicionador de sinais............................................................................
Figura 7.7 Placa de aquisição de sinais......................................................................
Figura 7.8 Massa desbalanceadora.............................................................................
Figura 7.9 Disco rotativo com as massas desbalanceadoras......................................
Figura 7.10 Acoplamento desalinhado na bancada....................................................
Figura 7.11 Acoplamento desalinhado.......................................................................
Figura 7.12 Acoplamento sem desalinhamento..........................................................
Figura 7.13 Rolamento utilizado para indução de defeitos........................................
Figura 8.1 Calibração do sistema...............................................................................
Figura 8.2 Espectro em deslocamento / sinal sem desbalanceamento / posição
axial.............................................................................................................................
Figura 8.3 Espectro em deslocamento / sinal com desbalanceamento / posição
axial.............................................................................................................................
Figura 8.4 Espectro em deslocamento / sinal sem desbalanceamento / posição
radial horizontal..........................................................................................................
Figura 8.5 Espectro em deslocamento / sinal com desbalanceamento / posição
radial horizontal..........................................................................................................
Figura 8.6 Espectro em deslocamento / sinal sem desbalanceamento / posição
radial vertical...............................................................................................................
Figura 8.7 Espectro em deslocamento / sinal com desbalanceamento / posição
radial vertical...............................................................................................................
Figura 8.8 Espectro em deslocamento / sinal sem desalinhamento / posição axial..
Figura 8.9 Espectro em deslocamento / sinal com desalinhamento / posição axial..
Figura 8.10 Espectro em deslocamento / sinal sem desalinhamento / posição radial
horizontal.....................................................................................................................
Figura 8.11 Espectro em deslocamento / sinal com desalinhamento / posição radial
horizontal.....................................................................................................................
Figura 8.12 Espectro em deslocamento / sinal sem desalinhamento / posição radial
vertical.........................................................................................................................
Figura 8.13 Espectro em deslocamento / sinal com desalinhamento / posição
vertical.........................................................................................................................
Figura 8.14 Tela do aplicativo que calcula as freqüências características dos
defeitos em rolamento.................................................................................................
Figura 8.15 Domínio do tempo / posição axial / defeito na pista interna...................
Figura 8.16 Domínio da freqüência / posição axial / defeito na pista interna.............
Figura 8.17 Envelope / Domínio do tempo / posição axial / defeito na pista interna.
Figura 8.18 Envelope / Domínio da freqüência / posição axial / defeito na pista
interna..........................................................................................................................
Figura 8.19 Domínio do tempo / posição axial / defeito na pista externa...................
Figura 8.20 Domínio da freqüência / posição axial / defeito na pista externa............
Figura 8.21 Envelope / Domínio do tempo / posição axial / defeito na pista externa
Figura 8.22 Envelope / Domínio da freqüência / posição axial / defeito na pista
externa.........................................................................................................................
Figura A1 Domínio do tempo / sinal sem desbalanceamento / posição axial.............
Figura A2 Domínio do tempo / sinal com desbalanceamento / posição axial............
Figura A3 Domínio do tempo / sinal sem desbalanceamento / posição radial
horizontal.....................................................................................................................
Figura A4 Domínio do tempo / sinal com desbalanceamento / posição radial
horizontal.....................................................................................................................
89
89
90
90
91
81
92
92
94
95
95
96
96
96
97
98
98
98
99
99
99
100
101
102
102
102
103
104
104
104
109
109
110
110
Figura A5 Domínio do tempo / sinal sem desbalanceamento / posição radial
vertical.........................................................................................................................
Figura A6 Domínio do tempo / sinal com desbalanceamento / posição radial
vertical.........................................................................................................................
Figura A7 Espectro em aceleração / sinal sem desbalanceamento / posição axial.....
Figura A8 Espectro em aceleração / sinal com desbalanceamento / posição axial.....
Figura A9 Espectro em aceleração / sinal sem desbalanceamento / posição radial
horizontal.....................................................................................................................
Figura A10 Espectro em aceleração / sinal com desbalanceamento / posição radial
horizontal.....................................................................................................................
Figura A11 Espectro em aceleração / sinal sem desbalanceamento / posição radial
vertical.........................................................................................................................
Figura A12 Espectro em aceleração / sinal com desbalanceamento / posição radial
vertical.........................................................................................................................
Figura A13 Espectro em velocidade / sinal sem desbalanceamento / posição axial...
Figura A14 Espectro em velocidade / sinal com desbalanceamento / posição axial..
Figura A15 Espectro em velocidade / sinal sem desbalanceamento / posição radial
horizontal.....................................................................................................................
Figura A16 Espectro em velocidade / sinal com desbalanceamento / posição radial
horizontal.....................................................................................................................
Figura A17 Espectro em velocidade / sinal sem desbalanceamento / posição radial
vertical.........................................................................................................................
Figura A18 Espectro em velocidade / sinal com desbalanceamento / posição radial
vertical.........................................................................................................................
Figura A19 Domínio do tempo / sinal sem desalinhamento / posição axial...............
Figura A20 Domínio do tempo / sinal com desalinhamento / posição axial..............
Figura A21 Domínio do tempo / sinal sem desalinhamento / posição radial
horizontal.....................................................................................................................
Figura A22 Domínio do tempo / sinal com desalinhamento / posição radial
horizontal.....................................................................................................................
Figura A23 Domínio do tempo/ sinal sem desalinhamento / posição radial vertical..
Figura A24 Domínio do tempo / sinal com desalinhamento / posição vertical..........
Figura A25 Espectro em aceleração / sinal sem desalinhamento / posição axial.......
Figura A26 Espectro em aceleração / sinal com desalinhamento / posição axial.......
Figura A27 Espectro em aceleração / sinal sem desalinhamento / posição radial
horizontal.....................................................................................................................
Figura A28 Espectro em aceleração / sinal com desalinhamento / posição radial
horizontal.....................................................................................................................
Figura A29 Espectro em aceleração / sinal sem desalinhamento / posição radial
vertical.........................................................................................................................
Figura A30 Espectro em aceleração / sinal com desalinhamento / posição vertical...
Figura A31 Espectro em velocidade / sinal sem desalinhamento / posição axial.......
Figura A32 Espectro em velocidade / sinal com desalinhamento / posição axial......
Figura A33 Espectro em velocidade / sinal sem desalinhamento / posição radial
horizontal.....................................................................................................................
Figura A34 Espectro em velocidade / sinal com desalinhamento / posição radial
horizontal.....................................................................................................................
Figura A35 Espectro em velocidade / sinal sem desalinhamento / posição radial
vertical.........................................................................................................................
Figura A36 Espectro em velocidade / sinal com desalinhamento / posição vertical..
111
111
111
112
112
112
113
113
114
114
114
115
115
115
116
116
117
117
117
118
118
118
119
119
120
120
120
121
121
121
122
122
SUMÁRIO
1 INTRODUÇÃO.....................................................................................................
1.1 Apresentação.......................................................................................................
1.2 Justificativa.........................................................................................................
1.3 Objetivos..............................................................................................................
1.3.1 Objetivo geral....................................................................................................
1.3.2 Objetivos específicos.........................................................................................
1.4 Metodologia utilizada.........................................................................................
1.5 Estrutura do trabalho........................................................................................
14
14
15
15
15
16
16
17
2 REVISÃO BIBLIOGRÁFICA.............................................................................
2.1 Introdução...........................................................................................................
2.2 Defeitos em máquinas rotativas.........................................................................
2.3 Técnicas de análise de sinais..............................................................................
2.4 Instrumentação virtual e LabVIEW..................................................................
2.5 Considerações finais...........................................................................................
18
18
18
19
20
20
3 FUNDAMENTAÇÃO TEÓRICA SOBRE DEFEITOS MECÂNICOS
MAIS COMUNS EM MÁQUINAS ROTATIVAS................................................
3.1 Introdução...........................................................................................................
3.2 Desbalanceamento de massa..............................................................................
3.2.1 Tipos de desbalanceamento...............................................................................
3.2.1.1 Desbalanceamento estático (Static Unbalance).............................................
3.2.1.2 Binário de desbalanceamento (Couple Unbalance).......................................
3.2.1.3 Desbalanceamento quase-estático (Quasi-Static Unbalance)......................
3.2.1.4 Desbalanceamento dinâmico (Dynamic Unbalance).....................................
3.2.2 Identificação do defeito de desbalanceamento através do sinal de vibração.....
3.3 Desalinhamento de eixos....................................................................................
3.3.1 Alinhamento de eixos........................................................................................
3.3.2 Tipos de desalinhamentos..................................................................................
3.3.2.1 Desalinhamento paralelo puro.......................................................................
3.3.2.2 Desalinhamento angular puro........................................................................
3.3.2.3 Desalinhamento misto....................................................................................
3.3.3 Importância do alinhamento..............................................................................
3.3.4 Identificação do defeito de desalinhamento através do sinal de vibração.........
3.4 Defeitos em rolamentos......................................................................................
3.4.1 Identificação de defeitos em rolamentos através do sinal de vibração..............
22
4 FUNDAMENTAÇÃO TEÓRICA SOBRE AQUISIÇÃO E ANÁLISE DE
SINAIS.......................................................................................................................
4.1 Introdução...........................................................................................................
4.2 Filtros...................................................................................................................
4.2.1 Filtro ideal e filtro real.......................................................................................
4.2.2 Tipos de filtros segundo a banda passante.........................................................
4.3 Digitalização de um sinal analógico..................................................................
4.3.1 Filtragem anti-aliasing.......................................................................................
4.4 Função Janela......................................................................................................
22
22
24
24
25
26
27
28
29
29
30
31
31
32
33
33
34
36
39
39
39
39
40
42
42
43
5 FUNDAMENTAÇÃO TEÓRICA SOBRE AS TÉCNICAS DE ANÁLISE
DE SINAIS PARA IDENTIFICAÇÃO DE DEFEITOS......................................
5.1 Introdução...........................................................................................................
5.2 Técnicas de análise de sinais..............................................................................
5.2.1 Nível global.......................................................................................................
5.2.2 Fator de crista (Crest-Factor)............................................................................
5.2.3 Curtose...............................................................................................................
5.2.4 Análise espectral................................................................................................
5.2.4.1 Análise espectral em aceleração, velocidade e deslocamento.......................
5.2.5 Técnica do envelope..........................................................................................
5.2.5.1 Efeitos de modulação de amplitude em rolamentos.......................................
5.2.5.2 Demodulação de sinais para a detecção de defeitos em rolamentos
(Envelope)...................................................................................................................
5.2.6 Cepstrum............................................................................................................
6 DESCRIÇÃO DO APLICATIVO DESENVOLVIDO PARA AQUISIÇÃO
E ANÁLISE DE SINAIS DE VIBRAÇÃO............................................................
6.1 Introdução...........................................................................................................
6.1.1 Instrumentos virtuais........................................................................................
6.2 Descrição do aplicativo desenvolvido para aquisição e análise de
vibração.....................................................................................................................
6.2.1 Módulo de aquisição de sinais...........................................................................
6.2.2 Módulo de visualização de sinais......................................................................
6.2.3 Módulo de cálculo de freqüências características de defeitos em
rolamentos...................................................................................................................
6.2.4 Módulo da técnica do envelope.........................................................................
6.2.5 Módulo do cepstrum.........................................................................................
6.2.6 Módulo do nível global, fator de crista e curtose..............................................
48
48
48
48
49
51
52
54
55
56
57
61
65
65
66
68
69
72
76
77
79
80
7 DESCRIÇÃO DA BANCADA EXPERIMENTAL............................................
7.1 Introdução...........................................................................................................
7.2 Bancada experimental........................................................................................
7.3 Cadeia de medição..............................................................................................
7.3.1 Sensor de vibração.............................................................................................
7.3.1.1 Características do acelerômetro utilizado na bancada..................................
7.3.1.2 Posicionamento dos acelerômetros na bancada............................................
7.3.2 Condicionador de sinais.....................................................................................
7.3.3 Placa de aquisição de sinais...............................................................................
7.4 Indução de defeitos na bancada........................................................................
7.4.1 Desbalanceamento de massa..............................................................................
7.4.2 Desalinhamento de eixo.....................................................................................
7.4.3 Defeitos nos rolamentos....................................................................................
84
84
85
86
86
87
88
88
89
90
90
91
92
8 MEDIÇÕES E ANÁLISE DOS SINAIS DE VIBRAÇÃO................................
8.1 Introdução...........................................................................................................
8.2 Calibração do sistema de aquisição de sinais...................................................
8.3 Análise dos sinais de vibração...........................................................................
8.3.1 Análise do defeito de desbalanceamento...........................................................
8.3.2 Análise do defeito de desalinhamento...............................................................
8.3.3 Análise do defeito nos rolamentos.....................................................................
93
93
93
94
95
97
100
8.3.3.1 Análise do defeito na pista interna................................................................. 101
8.3.3.2 Análise do defeito na pista externa................................................................. 103
9 CONCLUSÕES E RECOMENDAÇÕES...........................................................
9.1 Conclusões...........................................................................................................
9.2 Sugestões para trabalhos futuros......................................................................
106
106
106
REFERÊNCIAS........................................................................................................ 107
BIBLIOGRAFIA COMPLEMENTAR.................................................................. 108
APÊNDICE A............................................................................................................. 109
14
1 INTRODUÇÃO
1.1 Apresentação
A vibração é um parâmetro muito utilizado em programas de manutenção preditiva de
empresas de Engenharia, visto que ela indica a condição real do equipamento, evitando,
portanto, paradas inesperadas e substituição desnecessária de peças.
A análise do sinal de vibração pode ser realizada através de diversas técnicas, tais
como: Nível Global, Fator de Crista, Curtose, Análise Espectral, Técnica do Envelope e
Cepstrum, de acordo com o que se deseja diagnosticar. Por exemplo, se a necessidade é
apenas monitorar o nível de vibração, pode-se utilizar o Nível Global. No entanto, se a
necessidade é identificar o componente mecânico que apresenta defeito, pode-se realizar uma
Análise Espectral.
Defeitos como desbalanceamento de massa e desalinhamento de eixos podem ser
identificados através da Análise Espectral. Porém, falhas em rolamentos requerem uma
análise mais refinada, a qual pode ser realizada através da Técnica do Envelope.
Este trabalho descreve um aplicativo computacional desenvolvido para análise de
vibrações em máquinas rotativas, tendo por base a plataforma LabVIEW. Foram
desenvolvidas diversas rotinas, que desempenham funções de aquisição e de visualização de
sinais, bem como o cálculo de freqüências características de defeitos em rolamentos e, além
disso, possibilitam o uso das técnicas de análise de sinais acima citadas.
A validação do aplicativo foi realizada através de medições em uma bancada
experimental, composta basicamente de um motor AC de ½ HP, eixo e discos rotativos. Nesta
bancada foram induzidos os seguintes defeitos: desalinhamento do eixo, desbalanceamento de
massa nos discos rotativos e defeitos nos diferentes elementos dos mancais de rolamento.
15
1.2 Justificativa
O cenário organizacional sofreu muitas mudanças nos últimos anos. A concorrência
entre as empresas está cada vez mais acirrada e o mercado tem exigido qualidade e agilidade
nos processos. É necessário, portanto, que as máquinas estejam em condições operacionais o
maior tempo possível. Desta forma, as empresas precisam adequar sua forma de atuação a fim
de se manterem competitivas em seus mercados. Para isso, é interessante a implantação de um
programa de manutenção preditiva eficaz.
Departamentos de manutenção de empresas de Engenharia têm utilizado muito a
instrumentação virtual, uma ferramenta que apresenta um custo inferior quando comparada a
equipamentos convencionais de medição e mostra-se prática, pois com apenas um
computador portátil com uma placa de aquisição de sinais e um aplicativo computacional
pode ser transportada para qualquer lugar.
Considerando que a análise de vibrações em máquinas já tem apresentado grandes
contribuições para o entendimento do comportamento operacional de máquinas e a
identificação de possíveis falhas, este trabalho tem como objetivo o desenvolvimento de uma
ferramenta virtual para aquisição e análise de sinais de vibração, tendo por base a plataforma
LabVIEW.
1.3 Objetivos
1.3.1 Objetivo geral
Este trabalho tem o objetivo de desenvolver um aplicativo computacional para análise
de vibrações em máquinas rotativas, tendo por base a plataforma LabVIEW.
16
1.3.2 Objetivos específicos
Os objetivos específicos são:
•
Estudar as falhas mecânicas mais comuns em máquinas rotativas e seus efeitos de
vibração;
•
Estudar as técnicas de análise de sinais utilizadas para o tratamento de dados e
diagnóstico de defeitos;
•
Desenvolver um sistema aplicativo, tendo por base a plataforma LabVIEW, com
módulo de aquisição de sinais, arquivamento de dados, cálculo de freqüências
características de defeitos em rolamentos, visualização e tratamento de sinais;
•
Validar o aplicativo através de medições realizadas em uma bancada experimental
composta, basicamente, por um motor AC de ½ HP, eixo e discos rotativos.
1.4 Metodologia utilizada
A metodologia utilizada para a elaboração deste trabalho foi, primeiramente, estudar
os defeitos mecânicos que ocorrem com mais freqüência em máquinas rotativas e alguns
conceitos e técnicas de análise de sinais utilizadas para identificação destes defeitos.
Depois foi realizado um estudo relativo ao software LabVIEW e suas ferramentas,
utilizando os seus manuais, o “Help” do programa, apostilas, trabalhos de conclusão de curso
e artigos.
Em seguida, iniciou-se a programação em LabVIEW, na qual foram geradas rotinas
para aquisição e visualização de sinais, cálculo de freqüências características de defeitos em
rolamentos e aplicação de técnicas de análise de sinais.
A atividade seguinte correspondeu à indução de defeitos na bancada de testes, tais
como desbalanceamento de massa, desalinhamento de eixo e defeitos nos elementos dos
mancais de rolamento. A medição dos sinais de vibração foi realizada sempre após a
aplicação de cada defeito.
A última etapa foi a análise dos sinais de vibração, sendo que foram aplicadas as
técnicas de análise de sinais e realizadas as devidas conclusões.
17
1.5 Estrutura do trabalho
O capítulo 2 apresenta a revisão bibliográfica que serviu de base teórica para
elaboração deste trabalho.
O capítulo 3 contém um estudo relativo à teoria de defeitos como desbalancemanto de
massa, desalinhamento de eixos e defeitos em rolamentos.
No capítulo 4 são apresentadas algumas informações importantes sobre a teoria de
aquisição e análise de sinais.
O capítulo 5 refere-se às técnicas de análise de sinais para identificação de defeitos.
No capítulo 6 é apresentado o aplicativo computacional desenvolvido para aquisição e
análise de sinais de vibração.
O capítulo 7 corresponde à descrição da bancada de testes, na qual foram induzidos
defeitos mecânicos e realizadas as medições de vibração.
No capítulo 8 são mostrados os resultados das medições e as suas respectivas
apreciações.
Finalmente, o capítulo 9 apresenta as conclusões e recomendações para trabalhos
futuros.
18
2 REVISÃO BIBLIOGRÁGICA
2.1 Introdução
As máquinas rotativas constituem uma classe de equipamentos muito utilizada na
indústria. Portanto, é de extrema importância um programa de manutenção preditiva eficiente,
que busque eliminar as paradas desnecessárias destes equipamentos em um sistema. Para uma
manutenção confiável, deve-se monitorar a condição de uma máquina para encontrar
possíveis defeitos e diagnosticar o estado dos componentes críticos.
Esta questão tem levado ao desenvolvimento de novas tecnologias nas áreas de
sensores de medição, instrumentação virtual, softwares de processamento digital, simuladores
de sistemas dinâmicos e análise de dados. Além disso, muitos estudos nestas áreas têm sido
desenvolvidos com o objetivo de facilitar o monitoramento das máquinas e diagnosticar
defeitos em tempo hábil para manutenção.
2.2 Defeitos em máquinas rotativas
PACHOLOK (2004) em sua dissertação de mestrado mostra o desalinhamento de
eixos como um dos defeitos mais comuns em máquinas rotativas. Além disso, apresenta a
análise de vibração como uma das técnicas mais utilizadas pela manutenção preditiva e utiliza
a termografia como uma ferramenta auxiliar.
MARÇAL e SUSIN (2005) apresentam um método para detectar falha em máquinas
rotativas baseado no padrão de vibração do sistema e diagnostica a condição de operação por
Lógica Fuzzy. Eles consideram que quaisquer modificações ocorridas, devido ao
desbalanceamento, ao desalinhamento, à falta de rigidez, ao acoplamento defeituoso, às
correias frouxas ou gastas, aos eixos deformados e aos desajustes, alteram a amplitude da
vibração na freqüência de rotação do sistema rotativo em questão.
19
2.3 Técnicas de análise de sinais
NUNES (1989), em seu trabalho utiliza a Técnica do Envelope para diagnosticar
defeitos em mancais de rolamentos, através da análise de vibrações. Ele mostra que esta
técnica é eficiente, sensível e segura na detecção dos picos de freqüência relacionados aos
defeitos nos rolamentos.
ANTONIOLLI (1999) realizou uma análise comparativa entre as técnicas de medição
e análise de sinais de vibração, aplicadas na manutenção preditiva: Fator de Crista, Análise
Espectral e Envelope. Para isso, simulou defeitos em rolamentos em uma bancada de testes.
MESQUITA et al. (2002) desenvolveram um trabalho no qual detecta falhas em
rolamentos usando uma técnica de transformada tempo-freqüência, comparando com a
Técnica do Envelope.
BEZERRA (2004) desenvolveu um estudo para detectar falhas em rolamentos por
análise de vibração, através da aplicação de diversas técnicas, tanto as que ocorrem no
domínio do tempo (Média absoluta, Nível global RMS, Fator de crista e Curtose), quanto as
que ocorrem no domínio da freqüência (Densidade espectral de potência, Envelope e
Cepstrum). As técnicas foram aplicadas a rolamentos com falhas induzidas nas pistas e esfera
com diferentes tamanhos de falhas e submetidos a diferentes velocidades, para uma melhor
compreensão das técnicas.
SANTOS (2006) utilizou a FRF como auxílio na Técnica do Envelope para identificar
defeitos nos rolamentos. O trabalho foi realizado tendo por base um aplicativo desenvolvido
no software MATLAB, o qual foi validado com a utilização de um moto-esmeril.
PONCI e CUNHA explicam as principais causas de defeitos em rolamentos, quais as
freqüências características e como elas se comportam no sinal de vibração, tais como os seus
efeitos de modulação. Para diagnóstico dos defeitos, aplicam a Análise Espectral e Técnica do
Envelope. Além disso, mostram a variação do Fator de Crista no processo de degradação de
um rolamento.
20
2.4 Instrumentação virtual e LabVIEW
NATIONAL INSTRUMENTS (2000) apresenta em seus manuais do LabVIEW como
criar os Instrumentos Virtuais (VI’s), os quais correspondem às rotinas desenvolvidas na
Linguagem G (Linguagem de Programação Gráfica). Estes VI’s podem ser simples
programas, como calcular operações básicas, quanto trabalhar com a aquisição e tratamento
de sinais.
AQUINO (2004) explana detalhadamente uma técnica de monitoramento baseada na
função densidade de probabilidade Beta que analisa o engrenamento, dente a dente, sendo que
a detecção da anomalia é feita através de um parâmetro estatístico que é extraído do sinal de
vibração, visando facilitar o diagnóstico de defeitos de montagem em redutores de
engrenagens.
SOUSA (2005) desenvolveu um sistema aplicativo em LabVIEW para o
monitoramento de máquinas rotativas com um módulo de balanceamento de rotores. Em seu
trabalho, ele apresentou a teoria relativa ao Desbalanceamento Rotativo e os seus efeitos de
vibração, bem como Instrumentação Virtual.
SOUZA (2007) desenvolveu um projeto para implantação de uma bancada de
simulação de carga composta de uma máquina primária (motor CC) e uma máquina de teste
(gerador síncrono). Através deste projeto, é enfocado o estudo de vários elementos que são
implantados na bancada para uma completa monitoração e diagnóstico de todas as suas
variáveis, tais como: sensores, placa de aquisição de dados, acionamento eletrônico, circuito
condicionadores de sinais e as máquinas elétricas girantes.
2.5 Considerações finais
Para o desenvolvimento de um aplicativo computacional com funções de aquisição e
análise de sinais de vibração, com o objetivo de se identificar defeitos em máquinas rotativas
é necessário:
•
Conhecer os defeitos mais freqüentes neste tipo de equipamento e de que forma
eles se apresentam;
21
•
Ter conhecimento das técnicas utilizadas para análise de sinais de vibração que
possibilitam o acompanhamento de uma anomalia e a identificação de defeitos
antes que a máquina venha a parar;
•
Escolher uma linguagem de programação que facilite o desenvolvimento do
aplicativo e que este seja de simples utilização por parte dos usuários.
Dentre os trabalhos coletados, estes foram os que mais contribuíram para o
desenvolvimento deste trabalho. No entanto, vale ressaltar que há uma vasta literatura para
cada tópico abordado.
22
3 FUNDAMENTAÇÃO TEÓRICA SOBRE DEFEITOS MECÂNICOS MAIS
COMUNS EM MÁQUINAS ROTATIVAS
3.1 Introdução
Uma fonte comum de vibrações em máquinas rotativas é o desbalanceamento de
massa, gerado por assimetrias, tolerâncias dimensionais, desvios de forma, imperfeições de
matéria-prima e de montagem. Qualquer uma destas causas ou uma combinação delas acabará
com a condição de perfeita distribuição de massa em torno do eixo de rotação do rotor.
Outra origem comum de vibrações é o desalinhamento de eixos. Acoplamentos e
mancais são os primeiros componentes a sentir os efeitos do desalinhamento, pois as cargas
geradas causam desgaste prematuro nestes componentes. As vibrações e empenos nos eixos
causados pelo desalinhamento afetam diretamente selagens axiais e radiais. Em engrenagens,
o desalinhamento pode causar ruídos por mau engrenamento e desgastes prematuros nos
dentes. Por este motivo, demonstra-se a importância dada ao alinhamento no caso de
acoplamento de engrenagem. Em relação aos eixos, dependendo da robustez, podem sofrer
empenos, atritos com peças estacionárias ou até mesmo fraturar por fadiga quando ficam
submetidos às cargas elevadas provenientes do desalinhamento.
Os rolamentos, que são componentes presentes na maioria dos equipamentos rotativos,
apresentam um grande índice de falhas e, muitas vezes, prematuras. As causas mais comuns
dos defeitos em rolamentos são: seleção incorreta; sobrecarga; defeito de fabricação;
desalinhamento; montagem incorreta; estocagem inadequada; lubrificação inadequada,
excessiva ou insuficiente; falha de vedação e descargas elétricas através dos mancais.
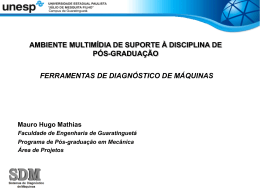
3.2 Desbalanceamento de massa
O desbalanceamento constitui uma das fontes mais comuns nos problemas de vibração
em máquinas. É um defeito gerado pela distribuição irregular de massa em torno do eixo de
rotação de um rotor, ou seja, o eixo principal de inércia (EPI) não coincide com o eixo de
rotação (ER), como pode ser visto na figura 3.1.
23
Figura 3.1 Discrepância entre ER e EPI
Fonte: ALMEIDA e GÓZ
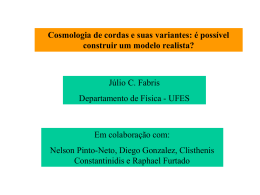
O excesso de massa em um lado do rotor faz com que a força centrífuga atuante sobre
este lado mais pesado supere a força centrífuga atuante sobre o lado oposto, forçando, então, o
lado mais leve na direção do lado mais pesado, sendo a força resultante a causadora da
vibração. A magnitude desta força depende da velocidade de rotação da máquina e da
excentricidade do centro de gravidade do rotor.
A força centrífuga é dada pela equação (3.1):
Fcent = m.e.ω 2
(3.1)
em que m é a massa desbalanceadora, e é a excentricidade ou a distância do centro de
gravidade da massa ao eixo de giro do rotor e ω (rad/s) a rotação da máquina.
Figura 3.2 Efeito da força centrífuga no rotor
24
3.2.1 Tipos de desbalanceamento
Existem quatro tipos de desbalanceamento. Para facilitar a definição de cada um dos
tipos de desbalanceamento, será considerado um rotor perfeitamente balanceado, onde se
supõe a adição de massas de desbalanceamento.
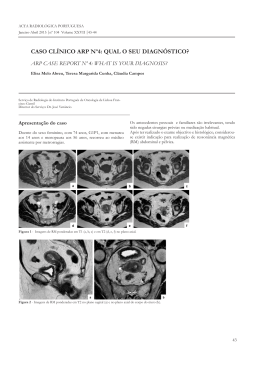
3.2.1.1 Desbalanceamento estático (Static Unbalance)
O desbalanceamento estático surge quando o eixo principal de inércia de um rotor
encontra-se deslocado, no entanto paralelo em relação ao eixo de rotação do mesmo, como
mostrado na figura 3.3. A distância entre o centro de gravidade (CG) e o eixo de rotação (a
excentricidade e) origina a força centrífuga quando da rotação do rotor. No caso do
desbalanceamento estático a massa de desbalanceamento e o CG encontram-se no mesmo
plano normal ao eixo de rotação, conforme figura 3.3a. Um rotor com duas massas de
desbalanceamento iguais e eqüidistantes com relação ao CG (figura 3.3b) caracteriza também
um desbalanceamento estático, uma vez que o efeito de ambas é equivalente ao efeito de uma
massa localizada no plano do CG.
A eliminação do desbalanceamento estático é obtida movendo-se o centro de
gravidade em direção ao eixo de rotação do rotor. Isto é feito através da adição ou retirada de
massa do rotor, de forma que a força radial causada por esta adição ou retirada seja igual em
módulo à força causada pela excentricidade do CG, mas com direção oposta. Rotores
desbalanceados estaticamente podem ser submetidos a um balanceamento em um plano.
25
Figura 3.3 Desbalanceamento estático
Fonte: SOUSA, 2005
3.2.1.2 Binário de desbalanceamento (Couple Unbalance)
O binário de desbalanceamento ocorre quando o eixo principal de inércia corta o eixo
de rotação, sendo o CG o ponto comum entre eles. Neste caso a presença das massas de
desbalanceamento não desloca o CG com relação ao eixo de rotação do rotor, no entanto
causa a inclinação do eixo principal de inércia. As massas de desbalanceamento geram duas
forças centrífugas (Fcent1 e Fcent2), mostradas na figura 3.4. Estas forças centrífugas
formam um binário, portanto se anulam, por serem paralelas e possuírem sentidos opostos. No
entanto, geram um momento, já que não estão contidas no mesmo eixo.
O exemplo mais simples de binário de desbalanceamento é o de massas de
desbalanceamento iguais posicionadas nos extremos opostos de um rotor e deslocadas de 180º
uma da outra, como mostra a figura 3.4a.
Em um binário de desbalanceamento, o CG pode estar inclusive fora do espaço
compreendido entre tais planos, como mostra o exemplo da figura 3.4b, onde o binário de
desbalanceamento é causado por um componente externo ao rotor.
Quanto à rotação de um rotor com desbalanceamento binário, cada uma das
extremidades vibra em direções opostas. Este tipo de desbalanceamento não pode ser
26
corrigido com apenas uma massa. Neste caso são necessárias duas massas, cada uma devendo
anular o efeito de uma das massas de desbalanceamento. Faz-se, portanto, necessário um
outro binário com massas opostas de 180º, possibilitando o “giro” do eixo principal de inércia
sobre o CG, fazendo com que aquele coincida com o eixo de rotação. O balanceamento deste
tipo de rotor é chamado de balanceamento em dois planos ou balanceamento dinâmico.
Figura 3.4 a) Binário de desbalanceamento; b) Binário de desbalanceamento causado por componente externo
Fonte: SOUSA, 2005
3.2.1.3 Desbalanceamento quase-estático (Quasi-Static Unbalance)
O desbalanceamento quase-estático ocorre quando o eixo principal de inércia corta o
eixo de rotação do rotor em um ponto, que não passa pelo CG, como pode ser visto na figura
3.5a. Este tipo de desbalanceamento também pode ser originado pela combinação dos
desbalanceamentos estático e binário, conforme mostrado na figura 3.5b. A figura 3.5c mostra
o desbalanceamento quase-estático causado por um componente externo acoplado. O
balanceamento de um rotor deste tipo só é possível se realizado em dois planos.
27
Figura 3.5 Desbalanceamento quase-estático
Fonte: SOUSA, 2005
3.2.1.4 Desbalanceamento dinâmico (Dynamic Unbalance)
O desbalanceamento dinâmico ocorre quando o eixo principal de inércia não encontra
o eixo de rotação. Este tipo de desbalanceamento é o mais freqüente. As massas de
desbalanceamento, neste caso, encontram-se deslocadas de um ângulo diferente de 180º,
como apresentado nas figuras 3.6a e 3.6b. A figura 3.6b mostra um binário de
desbalanceamento combinado com um desbalanceamento estático deslocados de um ângulo
diferente de 180º, o que resulta em um desbalanceamento dinâmico. Como nos dois tipos
28
anteriores de desbalanceamentos, o desbalanceamento dinâmico também só pode ser corrigido
com massas de correção em pelo menos dois planos perpendiculares ao eixo de rotação.
Figura 3.6 Desbalanceamento dinâmico
Fonte: SOUSA, 2005
3.2.2 Identificação do defeito de desbalanceamento através do sinal de vibração
O defeito de desbalanceamento pode ser identificado através da análise espectral e
caracteriza-se por ocorrer na freqüência de rotação da máquina. Deve-se medir a vibração da
máquina com o sensor nas posições radial e axial. Se o sinal referente à posição radial
apresentar maior amplitude, na freqüência de rotação da máquina, o defeito é
desbalanceamento. Isto se explica devido ao fato da força centrífuga, gerada pelo
desbalanceamento, ocorrer na posição radial.
29
3.3 Desalinhamento de eixos
O desalinhamento é a condição em que os eixos da máquina motriz e da máquina
motora não estão localizados na mesma linha de centro.
Segundo PACHOLOK (2004), o desalinhamento de eixos de máquinas dinâmicas
provoca forças de reação nos mancais, conforme ilustrado na figura 3.7. A alta carga nos
mancais tem como conseqüência o aumento do consumo de energia fornecida pelo acionador.
Figura 3.7 Forças de reação nos mancais
Fonte: PACHOLOK, 2004
3.3.1 Alinhamento de eixos
O alinhamento é o processo pelo qual dois eixos são posicionados de forma que suas
linhas de centro fiquem colineares quando em operação.
Para a conceituação de alinhamento, considera-se a posição relativa dos eixos em dois
planos imaginários, horizontal e vertical, conforme a figura 3.8. Denomina-se um dos eixos
como “acionador” e o outro como “acionado”.
Considera-se que um conjunto de máquinas acionador-acionado está alinhado quando
o desvio de concentricidade dos eixos, em todo o seu comprimento e com uma revolução
completa, está com valores de desvio dentro dos limites de tolerância. A figura 3.9 ilustra um
sistema perfeitamente alinhado, o qual deve ser considerado nos planos horizontal e vertical.
30
Figura 3.8 Sistema generalizado para alinhamento de eixos
Fonte: PACHOLOK, 2004
Figura 3.9 Sistema alinhado
Fonte: PACHOLOK, 2004
3.3.2 Tipos de desalinhamentos
O desalinhamento pode ocorrer de três formas:
31
3.3.2.1 Desalinhamento paralelo puro
O desalinhamento paralelo puro ocorre quando suas linhas de centro estão paralelas
entre si, porém não coincidentes, conforme a figura 3.10.
Figura 3.10 Desalinhamento paralelo puro
Fonte: PACHOLOK, 2004
3.3.2.2 Desalinhamento angular puro
O desalinhamento angular puro ocorre quando as linhas de centro dos eixos formam
um ângulo entre si, conforme a figura 3.11.
Figura 3.11 Desalinhamento angular puro
Fonte: PACHOLOK, 2004
32
3.3.2.3 Desalinhamento misto
O desalinhamento misto, também chamado de desalinhamento combinado, ocorre
quando existe a associação dos dois desalinhamentos anteriores, ou seja, as linhas de centro
dos eixos não estão coplanares e formam um ângulo entre si, conforme a figura 3.12.
É o desalinhamento mais encontrado na prática.
Figura 3.12 Desalinhamento misto
Fonte: PACHOLOK, 2004
Também é importante considerar o desalinhamento axial dos eixos, conforme a figura
3.13. Esse tipo de desalinhamento corresponde ao desvio de posição axial dos eixos em
relação a uma posição de referência. Por exemplo, um dos eixos está deslocado para trás.
Figura 3.13 Desalinhamento axial
Fonte: PACHOLOK, 2004
33
3.3.3 Importância do alinhamento
O alinhamento de eixos de equipamentos dinâmicos é muito importante para o
aumento do tempo médio entre uma falha e outra, ou seja, quebra menos freqüente dos
equipamentos, principalmente de mancais e acoplamentos. E, conseqüentemente, baixos
custos de manutenção e aumento da confiabilidade dos equipamentos, garantindo, desta
forma, a qualidade dos processos.
A figura 3.14 mostra um acoplamento danificado por desalinhamento.
Figura 3.14 Acoplamento danificado por desalinhamento
Fonte: PACHOLOK, 2004
3.3.4 Identificação do defeito de desalinhamento através do sinal de vibração
O defeito de desalinhamento, assim como o desbalanceamento, pode ser identificado
através da análise espectral, apresentando as seguintes características:
•
A freqüência da vibração é normalmente igual a 1x rotação. No entanto, se o
desalinhamento for severo surgem também em 2x rotação e 3x rotação;
•
A amplitude é proporcional à quantidade de desalinhamento;
•
A amplitude de vibração pode ser alta na direção axial bem como na radial. O
desalinhamento, mesmo com acoplamentos flexíveis, produz forças axiais e radiais
34
que, por sua vez produzem vibrações radiais e axiais. Sempre que a amplitude da
vibração axial for maior que a metade da maior amplitude radial, deve-se suspeitar de
desalinhamento ou empenamento.
•
O desalinhamento angular submete os eixos à vibração axial na freqüência 1x rotação.
O desalinhamento paralelo produz uma vibração radial em uma freqüência de 2x
rotação. E o desalinhamento combinado, além da vibração predominante acontecer na
direção axial em 1x rotação, ocorre uma vibração significativa em 2x rotação nesta
direção.
3.4 Defeitos em rolamentos
Os defeitos em rolamentos podem ocorrer nos seus diferentes componentes.
Geralmente, estes defeitos evoluem com certa lentidão e emitem sinais com bastante
antecedência da falha final, que pode ocorrer por travamento ou ruptura dos componentes.
Defeitos típicos que evoluem dessa forma são: riscos nas pistas, roletes ou esferas, trincas,
corrosão, erosão e contaminação.
O processo de degradação de um rolamento pode se iniciar na pista externa ou interna,
num dos elementos rolantes (rolos ou esferas) ou na gaiola, alastrando-se depois para os
demais componentes. A figura 3.15 apresenta os tipos de defeitos mais comuns em
rolamentos. A figura 3.16 mostra uma pista interna danificada por desalinhamento. E a figura
3.17 refere-se a uma pista interna danificada por fadiga.
35
Figura 3.15 Tipos de defeitos mais comuns em rolamentos
Fonte: NUNES, 1989
Figura 3.16 Pista interna danificada por desalinhamento
Fonte: PACHOLOK, 2004
Figura 3.17 Pista interna danificada por fadiga
Fonte: ANTONIOLLI, 1999
36
3.4.1 Identificação de defeitos em rolamentos através do sinal de vibração
Os defeitos em rolamentos podem ser identificados pela presença de freqüências
características.
Ao contrário da maioria das freqüências de vibração geradas por componentes
mecânicos, essas freqüências são verdadeiramente freqüências de defeito. Isto é, elas só
estarão presentes nos espectros de vibração quando os rolamentos estiverem realmente
defeituosos ou, pelo menos, quando seus componentes estiverem sujeitos a tensões e
deformações excessivas que poderão induzir uma falha.
Na maioria dos casos a pista externa é fixa e a pista interna gira junto com o eixo de
rotação da máquina. Quando isto acontece, as freqüências podem ser calculadas através das
seguintes equações:
•
fe =
•
fi =
•
Defeito na pista externa:
n D
cos β
f r 1 −
2 dm
(3.2)
Defeito na pista interna:
n
D
f r 1 +
cos β
2 dm
(3.3)
Defeito nos elementos rolantes:
2
dm D
fb =
f r 1 − cos β
D d m
(3.4)
37
•
fg =
Defeito na gaiola:
1 D
f r 1 −
cos β
2 dm
sendo:
f r : Freqüência de rotação em Hz;
n : Número de elementos rolantes;
D : Diâmetro dos elementos rolantes (mm);
d m : Diâmetro primitivo (mm);
β : Ângulo de contato;
d o : Diâmetro da pista externa;
d i : Diâmetro da pista interna;
Do : Diâmetro externo;
Di : Diâmetro interno.
A figura 3.18 ilustra um rolamento na forma esquemática:
(3.5)
38
Figura 3.18 Rolamento na forma esquemática
Fonte: ANTONIOLLI, 1999
39
4 FUNDAMENTAÇÃO TEÓRICA SOBRE AQUISIÇÃO E ANÁLISE DE SINAIS
4.1 Introdução
Este capítulo apresenta algumas informações importantes sobre a teoria de aquisição e
análise de sinais: Filtros, Digitalização de um sinal analógico e Função Janela.
4.2 Filtros
Segundo MESQUITA (2008), um filtro tem a função de remover partes não desejadas
do sinal, como o ruído, ou extrair partes úteis do sinal, como determinadas componentes de
freqüência que estão dentro do gama de freqüência.
4.2.1 Filtro ideal e filtro real
De acordo com MESQUITA (2008), um filtro ideal é aquele sistema, cuja resposta em
freqüência é unitária dentro de certa banda de freqüência e exatamente zero para outras
bandas, sem haver atenuação, como mostra a figura 4.1.
E em um filtro real, na sua resposta em freqüência, há uma atenuação em certas
freqüências e também há uma oscilação na banda passante chamada “ripple”. Geralmente a
freqüência de corte é definida após um decaimento de 3 dB na resposta em freqüência,
conforme a figura 4.2.
40
Figura 4.1 Filtro ideal
Fonte: B&K, 1998
Figura 4.2 Filtro real
Fonte: B&K, 1998
4.2.2 Tipos de filtros segundo a banda passante
•
Filtro passa-baixa: permite a passagem de freqüências abaixo de sua freqüência de
corte.
Figura 4.3 Filtro passa-baixa
Fonte: MESQUITA, 2008
41
•
Filtro passa-alta: permite a passagem de freqüências acima de sua freqüência de corte.
Figura 4.4 Filtro passa-alta
Fonte: MESQUITA, 2008
•
Filtro passa-banda: permite a passagem apenas de uma faixa de freqüências.
Figura 4.5 Filtro passa-banda
Fonte: MESQUITA, 2008
•
Filtro rejeita-banda: permite a passagem de todas as freqüências fora de uma certa
faixa.
Figura 4.6 Filtro rejeita-banda
Fonte: MESQUITA, 2008
42
4.3 Digitalização de um sinal analógico
Para digitalizar um sinal analógico são necessárias, no mínimo, quatro etapas:
•
Filtragem anti-aliasing (Antialias filtering);
•
Amostragem (Sampling);
•
Quantificação (Quantization);
•
Codificação (Encoding);
4.3.1 Filtragem anti-aliasing
De acordo com o Teorema de Nyquist, a taxa ou freqüência de amostragem (número
de amostras por unidade de tempo de um sinal) deve ser maior que o dobro da maior
freqüência contida no sinal a ser amostrado, para que possa ser reproduzido integralmente
sem erro de aliasing. Esta relação é dada pela equação (4.1):
f0 ≥ 2 fm
(4.1)
onde:
f 0 : Freqüência de amostragem
f m : Maior freqüência contida no sinal
A metade da freqüência de amostragem é chamada freqüência de Nyquist e
corresponde ao limite máximo de freqüência do sinal que pode ser reproduzido. Como não é
possível garantir que o sinal não contenha sinais acima deste limite (distorções, interferências,
ruídos e etc), é necessário filtrar o sinal com um filtro passa-baixa, com freqüência de corte
igual (ou menor) à freqüência de Nyquist, ou filtro anti-aliasing.
A figura 4.7 mostra um sinal senoidal sendo amostrado com taxas próximas ao limite.
A figura 4.7a corresponde à amostragem com freqüência maior que duas vezes a do sinal: há
amostras suficientes para que o sinal possa ser reproduzido sem erro de aliasing. Na figura
4.7b, a taxa de amostragem é igual a duas vezes a freqüência do sinal: não é possível a sua
reprodução. Na figura 4.7c, a freqüência de amostragem é menor que o dobro da freqüência
43
do sinal: a quantidade de amostras é insuficiente e o sinal reproduzido está errado. Este erro é
causado pelo fenômeno de aliasing.
Figura 4.7 Amostragem de um sinal senoidal
4.4 Função Janela
Durante a conversão do sinal do domínio do tempo para o domínio da freqüência,
usando a FFT, ocorre o efeito de vazamento espectral (leakage).
O leakage corresponde a um fenômeno que tende a espalhar a energia contida numa
freqüência em linhas de freqüências adjacentes no espectro, distorcendo-o, e fazendo com que
a amplitude seja subestimada.
Segundo MESQUITA (2008), o processo da FFT requer que o sinal amostrado
consista de uma representação completa do sinal original no domínio do tempo ou contenha
uma repetição periódica do sinal original medido. Em sinais transientes, cuja amplitude decai
a zero, totalmente contidos no registro temporal, isto não implica em problemas. Porém, em
sinais estacionários, como, por exemplo, sinais periódicos, pode haver problemas. O sinal
periódico pode não ter um número inteiro de ciclos capturado pelo registro temporal, fazendo
44
com que a repetição do registro temporal não reconstrua o sinal original exatamente, e
implicando em distorção no seu espectro.
A figura 4.8 exibe um sinal senoidal que apresenta um número inteiro de ciclos. A
figura 4.9 representa a sua FFT.
Figura 4.8 Sinal que apresenta número inteiro de ciclos
Figura 4.9 FFT do sinal que apresenta número inteiro de ciclos
A figura 4.10 exibe um sinal senoidal que não apresenta um número inteiro de ciclos.
A figura 4.11 representa a sua FFT, com efeito de leakage.
45
Figura 4.10 Sinal que não apresenta número inteiro de ciclos
Figura 4.11 FFT do sinal que não apresenta número inteiro de ciclos
Para minimizar este efeito, os sinais não periódicos e os periódicos, que não possuam
número inteiro de ciclos dentro do registro temporal, devem ser multiplicados por uma função
matemática que faz com que sinal tenha valor igual a zero no início e no final do registro
temporal. Esta função matemática é chamada de função janela ("window function"). Janelas
comumente usadas pelos analisadores digitais são: a janela uniforme (retangular), janela
Hanning, Kaiser-Besel e Flat Top, mostradas na figura 4.10.
46
Figura 4.12 Funções janela no domínio do tempo
Fonte: MCCONNELL, 1995
Há uma recomendação diferente de Janelas para tipo de sinal, de acordo com o quadro
4.1:
Tipo de sinal
Hanning
Kaiser-Bessel
Flat Top
Periódico
Em geral, é a
melhor.
Para precisão
em freqüência.
Para precisão
em amplitude.
É a melhor.
Para precisão
em freqüência.
Não é
recomendada.
Transiente
Aleatório
Quadro 4.1 Uso recomendável de Janelas
Retangular
Apenas se
houver um
número inteiro
de ciclos dentro
de T, o que é
bastante difícil
de alcançar na
prática.
É a mais
adequada
(exceção: Janela
exponencial em
testes modais
com o martelo
de impacto).
Não é
recomendada.
47
A figura 4.13 mostra a FFT do sinal mostrado na figura 4.10, com a janela Hanning.
Observa-se a minimização do efeito de leakage.
Figura 4.13 FFT do sinal que não apresenta número inteiro de ciclos, com a janela Hanning
48
5 FUNDAMENTAÇÃO TEÓRICA SOBRE AS TÉCNICAS DE ANÁLISE DE SINAIS
PARA IDENTIFICAÇÃO DE DEFEITOS
5.1 Introdução
A medição e análise de sinais de vibração possibilitam a identificação de falhas nos
estágios iniciais, antes da quebra do equipamento. Este procedimento pode ser refinado
através da utilização de técnicas de análise de sinais, que indicam o nível de vibração da
máquina e o componente que apresenta defeito, a partir de freqüências previamente
conhecidas.
As técnicas de análise de sinais comumente utilizadas para identificação de defeitos
em máquinas são: Nível Global, Fator de Crista, Curtose, Análise Espectral, Técnica do
Envelope e Cepstrum.
5.2 Técnicas de análise de sinais
5.2.1 Nível global
O Nível Global de vibrações consiste em medir o valor eficaz ou valor RMS (raiz
média quadrática) do sinal, proveniente de um transdutor. A análise é realizada através de
medições periódicas, cujos valores podem ser mostrados graficamente. Desta forma,
acompanha-se a evolução da anomalia em uma máquina ao longo do tempo.
Esta técnica indica apenas a condição do equipamento, isto é, ela não informa o tipo
de defeito ou qual o componente mecânico apresenta falha. Portanto, esta técnica constitui-se
em um “primeiro passo” para o monitoramento de máquinas através da análise de vibrações.
O gráfico traçado com os valores das medições é chamado de Curva de Tendência ou
Curva de Banheira. Nele observam-se, três níveis: Normal, onde não há ocorrência de
problemas; Alerta, onde ocorre um processo de desgaste não perigoso; e Reparo, onde é
necessária a manutenção do equipamento, conforme a figura 5.1.
49
Figura 5.1 Curva de tendências
Fonte: ANTONIOLLI, 1999
5.2.2 Fator de crista (Crest-Factor)
O Fator de Crista (FC) é a relação entre o valor de Pico ( x Pico ) e o valor RMS ( x RMS )
do sinal de vibração, conforme a equação (5.1).
FC =
x Pico
x RMS
(5.1)
O Fator de Crista deve ser obtido através de medições periódicas, tal que se possa
construir um gráfico de FC ao longo do tempo, como mostrado na Figura 5.2a.
De uma forma geral, rolamentos devem ser substituídos na transição do 2° para o 3°
estágio, ou seja, quando uma redução do Fator de Crista se tornar evidente. Isto acontece
porque quando a máquina não possui defeito o nível de vibração é baixo, ou seja, tanto o valor
RMS quanto o valor de pico são baixos. O Fator de Crista aumenta a partir do momento em
que aparecem pequenos defeitos localizados, que fazem com que o valor de pico aumente,
porém o valor RMS mantém-se estável, aumentando a relação entre ambos os valores.
Quando os defeitos passam a ficar mais intensos, o nível de vibração se eleva, aumentando
também os valores de pico e RMS, o que faz com que a relação diminua.
50
Figura 5.2 Princípio do fator de crista
Fonte: ANTONIOLLI, 1999
Figura 5.3 Variação típica do fator de crista durante o processo de degradação de um rolamento
Fonte: PONCI e CUNHA
51
Segundo BEZERRA (2004), essa redução do Fator de crista demonstra que esta
técnica não é um bom indicador de falhas em um estágio de falha severa. Uma forma
encontrada para eliminar este problema foi a criação do Fator K ( Fk ), o qual é o produto do
x Pico e x RMS , como mostra a equação (5.2):
Fk = x Pico × x RMS
(5.2)
Na Figura 5.4, estão representados o Fator K e o seu comportamento em relação à
condição do rolamento.
Figura 5.4 Fator K
Fonte: BEZERRA, 2004
5.2.3 Curtose
A curtose é definida como o quarto momento estatístico central normalizado pelo
desvio padrão, na quarta potência, do sinal de vibração e é representada pela equação (5.4).
∞
m =
4
4
∫ [x(t ) − µ ] p(x )dx
−∞
(5.3)
52
4
1
m
k= = 4
σ σ
∞
4
∫ [x(t ) − µ ] p(x )dx
(5.4)
−∞
em que:
x(t ) representa o sinal de vibração;
µ é a média do sinal;
p (x ) é a densidade de probabilidade de x(t ) ;
σ é o desvio padrão.
Segundo ANTONIOLLI (1999), em um rolamento sem defeito, as vibrações geradas
pelo rolamento das esferas sobre as pistas são de natureza aleatória. Além disso, a distribuição
de probabilidade de um sinal aleatório tende à gaussiana quando a sua duração é
suficientemente grande. A distribuição gaussiana p (x ) é definida por:
1 x(t ) − µ 2
1
exp −
p(x ) =
2πσ
2 σ
(5.5)
A idéia do uso da curtose (k) consiste em avaliar a ocorrência de um defeito através da
função densidade de probabilidade.
De acordo com MESQUITA (2002), o Fator de Curtose obtido para mancais em bom
estado é igual a 3. Porém, com o surgimento e desenvolvimento da falha, os valores deste
fator tendem a aumentar.
É importante ressaltar que a curtose não consegue localizar um defeito, recomenda-se,
portanto, o uso de técnicas complementares, uma vez que corresponde a uma técnica no
domínio do tempo.
5.2.4 Análise espectral
A análise espectral é uma técnica que consiste em analisar o sinal de vibração a partir
do espectro de freqüência, convertendo-se o sinal do domínio do tempo, através de um
53
procedimento matemático chamado de “Transformada Rápida de Fourier” ou, simplesmente,
FFT.
Os parâmetros fundamentais da análise espectral são: a amplitude e a freqüência, visto
que a amplitude do sinal indica a gravidade do problema e a freqüência indica o componente
ou o tipo de defeito.
Por exemplo, defeitos em engrenagens ocorrem na freqüência de engrenamento, que é
o produto entre o número de dentes da engrenagem e a sua rotação. Baseando-se nisto, foi
simulado um sinal no LabVIEW, referente a um defeito em um redutor, nas engrenagens 1, 3 e
5. O esquema do redutor é apresentado na figura 5.5.
A rotação do eixo do motor é igual a 1094 RPM (18,23 Hz), o que permite determinar
as freqüências de engrenamento das engrenagens 1, 3 e 5 como sendo:
•
Eixo 1: 18,23Hz × 24 dentes = 437,60 Hz
•
Eixo 2: 3,12 Hz × 20 dentes = 62,51Hz
•
Eixo 3: 0,65Hz × 35 dentes = 23,03Hz
Figura 5.5 Esquema do redutor
54
Figura 5.6 Simulação do sinal de vibração em um redutor
No espectro da figura 5.7 aparecem vários picos nas freqüências de engrenamento,
bem como várias modulações. O defeito caracterizado por esse tipo de espectro é o erro no
módulo e excentricidade na engrenagem.
62,5 Hz
Eng. 3
437 Hz
Eng. 1
23 Hz
Eng. 5
Figura 5.7 Espectro do sinal
5.2.4.1 Análise espectral em aceleração, velocidade e deslocamento
Ao analisar um sinal de vibração através do espectro de freqüências é importante saber
que em baixas freqüências (até 4 a 5 vezes a rotação do eixo) ocorrem defeitos como
desbalanceamento e desalinhamento e devem ser analisados no espectro de freqüência em
55
deslocamento. Por outro lado, defeitos que ocorrem em altas freqüências (acima de 5 vezes a
rotação do eixo) devem ser analisados no espectro de freqüência em aceleração. No entanto,
quando não se sabe o tipo de defeito existente na máquina, ou seja, se este é de baixa ou alta
freqüência, deve-se analisar o sinal no espectro de freqüência em velocidade.
A equação (5.6) corresponde ao sinal em deslocamento. Ao derivá-la, obtém-se o sinal
em velocidade, equação (5.7). E derivando a equação (5.7), obtém-se o sinal em aceleração,
equação (5.8). Observa-se que conforme o sinal é derivado, aumenta-se a sua amplitude. Visto
que no sinal em velocidade multiplica-se pela freqüência e no sinal em aceleração multiplicase pela freqüência ao quadrado. Portanto, quanto maior esta freqüência, maior será a
amplitude do sinal. Isto explica o fato do sinal em deslocamento acentuar as baixas
freqüências e o sinal em aceleração acentuar as altas freqüências. Enquanto que o sinal em
velocidade mantém uma média.
x(t ) = X sin (ωt )
(5.6)
x(t ) = ωX cos(ωt )
•
(5.7)
••
(5.8)
x (t ) = −ω 2 X sin (ωt )
5.2.5 Técnica do envelope
A técnica do envelope é considerada uma das técnicas mais poderosas para detectar e
diagnosticar falhas em rolamentos. De acordo com ANTONIOLLI (1999), o envelope
corresponde à demodulação das freqüências de defeito do rolamento na alta freqüência de
ressonância do mancal, ela reduz os problemas das altas freqüências para as baixas
freqüências.
Esta técnica mostra claramente onde o defeito está localizado e qual o nível de
vibração que este defeito está causando ao mancal. A inspeção ou medição no mancal deve
ser periódica para poder identificar as variações do nível de aceleração em relação ao nível
inicial de quando o mancal era novo.
56
5.2.5.1 Efeitos de modulação de amplitude em rolamentos
Segundo PONCI e CUNHA, Modulação de Amplitude corresponde à variação com o
tempo da amplitude de uma vibração (figura 5.8). Neste caso, a componente básica é
denominada “Portadora” e o sinal que descreve a variação da amplitude da portadora ao longo
do tempo é denominado “Sinal Modulante” ou “Componente Moduladora” e a sua freqüência
é denominada “Freqüência de Modulação”.
Figura 5.8 Modulação de amplitude
Fonte: PONCI e CUNHA
PONCI e CUNHA afirmam ainda que o espectro de um sinal modulado (figura 5.9)
consta de um pico central na freqüência da portadora (fp), ladeado por picos denominados
“Bandas Laterais”, que se situam acima e abaixo da portadora e são espaçados entre si e do
pico central por um valor igual à Freqüência de Modulação (fm). Se o sinal modulante for
senoidal, existem apenas duas bandas laterais, uma de cada lado da portadora. Se o sinal
modulante for complexo, existe uma série de bandas laterais de cada lado da portadora.
57
Figura 5.9 Espectro de um sinal modulado
Fonte: PONCI e CUNHA
De acordo com PONCI e CUNHA, os defeitos em rolamentos geram impactos
repetitivos que excitam freqüências naturais elevadas (maior que 500 Hz), as quais se
propagam pela caixa dos mancais e estrutura da máquina na forma de ondas de tensão. Assim,
essas vibrações geradas pelos defeitos em rolamentos são moduladas em amplitude pela
seqüência de impactos repetitivos e pelo efeito do amortecimento. As portadoras são as
freqüências naturais dos componentes do rolamento (pistas e elementos rolantes) e da caixa.
As moduladoras são as freqüências básicas de defeito.
5.2.5.2 Demodulação de sinais para a detecção de defeitos em rolamentos (Envelope)
PONCI e CUNHA afirmam que as vibrações de alta freqüência geradas pelos defeitos
de rolamentos possuem intensidade bastante reduzida em comparação com as amplitudes das
componentes de baixa freqüência, relacionadas com defeitos de alta energia como:
desbalanceamento, desalinhamento, e folgas.
A grande vantagem do processo de demodulação é eliminar essas componentes de alta
energia, permitindo detectar com maior precisão e antecedência só os defeitos de rolamentos.
Além disso, a análise dos espectros de envelope permite determinar as taxas de repetição dos
impactos que geram as ondas de tensão, identificando a sua origem, ou seja, os componentes
defeituosos do rolamento.
58
O procedimento de aplicação da Técnica do Envelope é mostrado na figura 5.10, onde:
I) Sinal de vibração no domínio do tempo medido na superfície do mancal;
II) Espectro de freqüência correspondente ao sinal (I), obtido através da Transformada de
Fourier;
III) Sinal (I) filtrado utilizando um filtro passa-banda. Contém somente as freqüências de
ressonância que são moduladas pela freqüência dos impactos;
IV) Espectro de freqüência correspondente ao sinal (III);
V) Sinal (III) demodulado após a aplicação da Técnica do Envelope;
VI) Espectro de freqüência correspondente ao sinal (V).
O envelope do sinal pode ser obtido através de um aparelho analógico, denominado
“detector de envelope”, ou de forma digital, através da Transformada de Hilbert.
Figura 5.10 Esquema da técnica do envelope
Fonte: NUNES 1989
59
Para entender melhor esta técnica, simulou-se no LabVIEW um sinal característico de
um defeito em rolamento. Este defeito corresponde ao impacto de uma falha interna excitando
somente uma ressonância. O sinal é mostrado na figura 5.11 e possui duas freqüências, uma
portadora com valor igual a 960 Hz que corresponderia à freqüência natural do mancal e uma
moduladora com valor igual a 160 Hz que seria a freqüência de defeito no rolamento.
Figura 5.11 Simulação de defeito em rolamento
A figura 5.12 corresponde ao espectro do sinal, obtido através da Transformada de
Fourier. Como pode ser observado, o sinal apresenta modulação, com um pico central na
freqüência de 960 Hz e bandas laterais espaçadas em 160 Hz.
960 Hz
Figura 5.12 Espectro do sinal
O sinal foi filtrado na freqüência de 960 Hz, utilizando um filtro passa-banda com
freqüências de corte de 800 Hz e 1120 Hz (figura 5.13).
60
Figura 5.13 Sinal filtrado
A figura 5.14 é referente ao espectro do sinal filtrado.
960 Hz
Figura 5.14 Espectro do sinal filtrado
A figura 5.15 é relativa ao envelope do sinal, obtido através da aplicação da
Transformada de Hilbert. Observa-se que a demodulação do sinal é feita extraindo-se somente
a envoltória do sinal. Outra característica interessante desta técnica é a conversão do sinal
para valores positivos, por isso também recebe o nome de “Módulo da Transformada de
Hilbert”.
61
Figura 5.15 Envelope do sinal
O espectro de freqüência do envelope, mostrado na figura 5.16, apresenta um pico na
freqüência de 160 Hz (freqüência de defeito no rolamento) e em 320 Hz (múltiplo de 160 Hz).
160 Hz
320 Hz, múltiplo de 160 Hz
Figura 5.16 Espectro do envelope
5.2.6 Cepstrum
O Cepstrum é uma técnica que tem sido utilizada principalmente no diagnóstico de
defeitos em engrenagens e em rolamentos.
Segundo ALMEIDA e GÓZ (2000), o Cepstrum identifica e mostra famílias de picos,
com espaçamento igual, presentes no espectro de freqüência de um sinal. As principais causas
da geração destas famílias são as diversas formas de modulação, principalmente a de
freqüência. Portanto, a análise cepstral é uma ferramenta poderosa e de uso simples na
descoberta e identificação de processos de modulação.
62
O Cepstrum ou mais precisamente, o Cepstrum de Potência foi originalmente definido
por B. P. Borget, como “o espectro de potência do logaritmo do espectro de potência”, ou
matematicamente:
C p (τ ) = ℑ{log Gxx ( f )}
(5.9)
2
onde:
Gxx ( f ) = ℑ{xk (t )}
2
(5.10)
é o espectro de potência do sinal temporal xk (t) e τ { } representa a Transformada de Fourier
da função entre chaves.
Mais tarde adotou-se uma outra definição para o Cepstrum, “A transformada inversa
do logaritmo do espectro de potência”, ou seja:
C p (τ ) = ℑ−1{log Gxx ( xk (t ))}
(5.11)
ALMEIDA e GÓZ (2000) afirmam que é possível demonstrar que as duas definições
geram o mesmo resultado, isto é, o mesmo Cepstrum. A demonstração baseia-se no fato de
que para uma função real e par, tal como o Espectro de Potência, as transformadas direta e
inversa de Fourier dão o mesmo resultado, exceto por um possível fator de escala.
Ainda segundo ALMEIDA e GÓZ (2000), a palavra “cepstrum” é derivada da
inversão das primeiras letras da palavra “spectrum”. Pelo mesmo processo a palavra
“freqüência” gerou o nome da variável independente do cepstrum, a “quefrência”, cuja
unidade é τ (tau) com dimensão de segundo (tempo). A unidade da quefrência apesar de ser
segundo, não é igual ao tempo normal (do relógio), pois não foi obtida pela volta ao domínio
da freqüência pela transformada inversa de Fourier, mas sim de uma nova transformada
aplicada no domínio da freqüência. A idéia do tempo no cepstrum representa a idéia de
repetição, proximidade de componentes de freqüência no espectro de freqüência normal.
Por esta concepção de tempo do cepstrum, origina-se a habilidade da análise cepstral
de mostrar as famílias de picos que mantêm entre si o mesmo espaçamento de freqüência.
Assim, altos valores de quefrência representam menores espaçamentos de freqüência, e baixa
quefrência representa maiores espaçamentos. E a amplitude da componente cepstral é
63
proporcional ao tamanho da família identificada, ou seja, o número de componentes
igualmente espaçadas.
A figura 5.17 apresenta um sinal modulado por duas freqüências de 10 Hz e 100 Hz.
Figura 5.17 Sinal modulado
A figura 5.18 corresponde ao espectro de potência do sinal modulado, mostrando dois
picos nas freqüências de 90 Hz e 110 Hz, as quais equivalem a maior freqüência (100 Hz)
menos a menor (10 Hz) e a maior (100 Hz) mais a menor (10 Hz).
90 Hz
110 Hz
Figura 5.18 Espectro de potência do sinal
Na Figura 5.19, tem-se o cepstrum do sinal. Os picos obtidos têm um espaçamento de
0,1 s cujo valor inverso 1/0,1 = 10 Hz, que é a freqüência de modulação do sinal.
64
0,1 s
Figura 5.19 Cepstrum do sinal
0,2 s
65
6 DESCRIÇÃO DO APLICATIVO DESENVOLVIDO PARA AQUISIÇÃO E
ANÁLISE DE SINAIS DE VIBRAÇÃO
6.1 Introdução
O aplicativo desenvolvido para aquisição e análise de sinais de vibração utiliza como
base a plataforma LabVIEW.
O LabVIEW é um software aplicativo baseado na linguagem G ou linguagem de
programação gráfica, que emprega ícones ao invés de textos para criar aplicações. Esta
linguagem é diferente das linguagens de programação baseadas em textos (linhas de
comando), onde as instruções determinam a execução do programa. A figura 6.1 apresenta um
exemplo de programação através de linhas de comando e a figura 6.2 refere-se à programação
através de ícones.
A programação em LabVIEW está baseada no fluxo de dados, onde os dados
determinam a execução, trazendo algumas vantagens para aplicações científicas e de
Engenharia, principalmente em aplicações de aquisição e manipulação de dados.
Os aplicativos são desenvolvidos pelo usuário, utilizando um conjunto de ferramentas
e objetos que possuem funções para aquisição, análise e apresentação dos dados, GPIB e
controle de instrumentos seriais. Os códigos são adicionados no diagrama de bloco usando
representações gráficas de funções para controlar os objetos adicionados no painel frontal.
Depois de criado, o diagrama de bloco é compilado para linguagem de máquina.
Figura 6.1 Exemplo de programação através de linhas de comando
66
Figura 6.2 Exemplo de programação através de ícones
6.1.1 Instrumentos virtuais
Os programas do LabVIEW são chamados de Instrumentos Virtuais, ou VIs, porque
sua aparência e operação imitam instrumentos físicos, tais como osciloscópios e multímetros.
Cada VI tem funções que manipulam a entrada pela interface do usuário ou de outras fontes,
através da aquisição de sinais, e indicam essa informação ou a movem para outros arquivos ou
outros computadores.
Um VI contém os três seguintes componentes:
•
Painel Frontal – Serve como interface do usuário (figura 6.3).
•
Diagrama de Bloco – Contém o código fonte gráfico que define o funcionamento
do VI (figura 6.4).
•
Ícone e Conector – Identificam o VI, de modo que este possa ser usado em um
outro VI (figuras 6.5 e 6.6). Um VI dentro de um outro VI é chamado de subVI.
Um subVI corresponde a uma sub-rotina em linguagens de programação baseadas
em texto.
67
Figura 6.3 Painel frontal
Figura 6.4 Diagrama de bloco
Figura 6.5 Ícone
Figura 6.6 Conector
68
6.2 Descrição do aplicativo desenvolvido para aquisição e análise de vibração
O aplicativo desenvolvido foi intitulado como “Programa de Detecção de Defeitos em
Máquinas Rotativas”. Ele possui diversos módulos, responsáveis pela aquisição e visualização
de sinais, cálculo de freqüências características de defeitos em rolamentos e aplicação das
técnicas comumente utilizadas para análise de sinais de vibração. Cada módulo desses
corresponde a um subVI.
A tela inicial é composta por sete botões, como pode ser visto na figura 6.7:
Figura 6.7 Tela inicial do aplicativo
69
A figura 6.8 indica a função de cada botão.
⇒
Abre o módulo de aquisição de sinais.
⇒
Abre o módulo de visualização de sinais.
⇒
Abre o módulo de cálculo de freqüências características de
defeitos em rolamentos.
⇒
Abre o módulo da técnica do envelope.
⇒
Abre o módulo do cepstrum.
⇒
Abre o módulo do nível global, fator de crista e curtose.
⇒
Pára a execução do programa. Está presente em todos os
módulos.
Figura 6.8 Botões da tela inicial
6.2.1 Módulo de aquisição de sinais
Este módulo possui a configuração responsável pela aquisição do sinal. O painel
frontal, mostrado na figura 6.9, apresenta dois gráficos, um no domínio do tempo e outro no
domínio da freqüência; controles para configuração da amostragem do sinal, isto é, o número
de amostras e taxa de aquisição; diretório onde deve ser salvo o arquivo correspondente ao
sinal de vibração aquisitado; configuração de filtro; canal de aquisição; e o botão “PARAR”.
70
Figura 6.9 Tela de aquisição de sinais
A figura 6.10 apresenta os controles para configuração da amostragem, cuja
informação é fundamental para a correta aquisição do sinal.
Figura 6.10 Controles para configuração de amostragem do sinal
A figura 6.11 apresenta o controle utilizado para escolha do diretório onde será salvo o
arquivo com os dados do sinal adquirido. O botão “Desabilitar” deve ser clicado para ativar o
arquivamento do sinal, ou seja, quando o programa é executado, a aquisição inicia
automaticamente, porém o sinal só será salvo a partir do momento em que for habilitado.
71
Botão para
escolha do
diretório
Figura 6.11 Informação do diretório onde o arquivo deve ser salvo
O arquivo gerado possui a extensão (.lvm) e pode ser lido no programa “Bloco de
notas”. Além de todos os pontos que compõem o sinal, o arquivo apresenta um cabeçalho com
informações básicas, tais como a data e a hora da aquisição, o canal, o número de amostras, e
a unidade do eixo Y, que neste caso é Volts. A figura 6.12 mostra um exemplo de um arquivo.
A figura 6.13 refere-se à configuração do Filtro, do tipo “passa-banda”, isto é, as
freqüências de corte inferior e superior.
Na figura 6.14 é mostrado o controle onde é realizada a seleção do canal que fará a
aquisição do sinal.
A figura 6.15 apresenta o diagrama de bloco que contém o código fonte para aquisição
do sinal.
Figura 6.12 Exemplo de arquivo (.lvm) que contém os dados do sinal de vibração
72
Figura 6.13 Configuração de filtro
Figura 6.14 Configuração do canal de aquisição
Figura 6.15 Diagrama de bloco do módulo de aquisição de sinais
6.2.2 Módulo de visualização de sinais
Este módulo é responsável pela visualização dos sinais, após a aquisição e
arquivamento. Ele apresenta quatro gráficos: um no domínio do tempo, um espectro de
freqüência em aceleração, em velocidade e outro em deslocamento. Possui também controles
de configuração referentes ao sensor utilizado na aquisição; controles para abrir o arquivo
salvo; indicadores que informam os valores de Pico, RMS, Fator de Crista e Curtose do sinal.
As figuras 6.16 e 6.17 mostram o painel frontal do módulo de visualização de sinais.
73
Figura 6.16 Tela de visualização de sinais em aceleração no domínio do tempo e da freqüência
Figura 6.17 Tela de visualização de sinais em velocidade e deslocamento no domínio da freqüência
74
A figura 6.18 exibe os controles utilizados para configuração do sensor responsável
pela aquisição do sinal. Antes de realizar a leitura do sinal, deve-se informar dados como a
sensibilidade do sensor, em mV/EU, e a unidade de engenharia (EU). Estes controles estão
presentes também nos módulos da técnica do envelope e do cepstrum, que serão explicados
posteriormente.
Figura 6.18 Configuração do sensor
A figura 6.19 indica o botão que abre o arquivo gerado durante a aquisição do sinal. O
sinal só será mostrado a partir do momento que o botão “Desabilitar” for clicado, ou seja, ele
estará habilitando a leitura do sinal. Assim como, os controles de configuração do sensor, este
controle está presente nos módulos da técnica do envelope e do cepstrum.
Botão que
abre o
arquivo
Figura 6.19 Controle que abre o arquivo
Na figura 6.20 são apresentados os indicadores que mostram os valores de Pico, RMS,
Fator de Crista e Curtose do sinal.
75
Figura 6.20 Indicadores de valores de Pico, RMS, Fator de Crista e Curtose do sinal
A figura 6.21 apresenta o diagrama de bloco que contém o código fonte para
visualização do sinal em aceleração no domínio do tempo e no domínio da freqüência. E a
figura 6.22 apresenta o diagrama de bloco que contém o código fonte para visualização do
sinal em velocidade e em deslocamento no domínio da freqüência.
A função janela é definida pela função FFT, a qual é mostrada em destaque nas figuras
6.21 e 6.22.
Figura 6.21 Diagrama de bloco do módulo de visualização de sinais
76
Figura 6.22 Diagrama de bloco do módulo de visualização de sinais
6.2.3 Módulo de cálculo de freqüências características de defeitos em rolamentos
Este módulo realiza o cálculo das freqüências características de defeitos em
rolamento, referentes aos diferentes componentes do mancal. A figura 6.23 mostra o painel
frontal e a figura 6.24 ilustra o diagrama de bloco.
Dados como número de elementos rolantes, freqüência de rotação da máquina (Hz),
diâmetro dos elementos rolantes (mm), diâmetro primitivo (mm) e ângulo de contato devem
ser inseridos. O programa, então calcula e informa os valores das freqüências relativas a
defeitos na pista externa, pista interna, gaiola e elemento rolante.
77
Figura 6.23 Tela de cálculo de freqüências características de defeitos em rolamentos
Figura 6.24 Diagrama de bloco do módulo de cálculo de freqüências características de defeitos em rolamentos
6.2.4 Módulo da técnica do envelope
Neste módulo foi aplicada a técnica do envelope. Ele é composto por dois gráficos:
um que mostra o envelope do sinal e outro que mostra o espectro de freqüência do envelope.
Além disso, possui controles para configuração do sensor, controles para abrir o arquivo
salvo, e controles para configuração do filtro, conforme a figura 6.25.
78
Figura 6.25 Tela da técnica do envelope
A figura 6.26 apresenta os controles de configuração do filtro, onde devem ser
indicadas as freqüências de corte inferior e superior.
Figura 6.26 Configuração de filtro
A figura 6.27 mostra o código fonte da rotina desenvolvida para a técnica do envelope.
79
Figura 6.27 Diagrama de bloco do módulo da técnica do envelope
6.2.5 Módulo do cepstrum
Este módulo é referente à técnica do cepstrum. Ele é composto por dois gráficos: um
que mostra o espectro de potência do sinal e outro que mostra o cepstrum. Além disso, possui
controles para configuração do sensor, e controles para abrir o arquivo salvo, como mostra a
figura 6.28.
Figura 6.28 Tela do Cepstrum
80
A Figura 6.29 apresenta o diagrama de bloco do módulo do Cepstrum. O espectro de
potência é definido pela função FFT, a qual é mostrada em destaque na figura 6.29.
Figura 6.29 Diagrama de bloco do módulo do cepstrum
6.2.6 Módulo do nível global, fator de crista e curtose
Este módulo é referente às três técnicas, separadas em guias: Nível Global, Fator de
Crista e Curtose. A sua composição é bem simples: possui três gráficos e três tabelas, um para
cada técnica.
Ao ler o sinal no módulo de visualização, o usuário possui a informação destes
valores. Através de medições periódicas, ele pode inserir estes valores nas tabelas e gerar os
gráficos.
A figura 6.30 mostra a tela do nível global, a figura 6.31 apresenta a tela do fator de
crista e a figura 6.32 é referente à tela da curtose.
As figuras 6.33, 6.34 e 6.35 mostram o diagrama de bloco deste módulo. Cada técnica
está contida em um ‘caso’ do ‘Case Structure’, o qual é submetido a uma condição amarrada
ao ‘Case Selector’. O ‘Selector Label’ mostra o primeiro caso, correspondente à técnica do
nível global, o segundo corresponde ao fator de crista e o terceiro é a curtose.
81
Figura 6.30 Tela do nível global
6.31 Tela do fator de crista
82
6.32 Tela da curtose
Selector Label
Case
Selector
Figura 6.33 Diagrama de bloco que executa o nível global
83
Figura 6.34 Diagrama de bloco que executa o fator de crista
Figura 6.35 Diagrama de bloco que executa a curtose
84
7 DESCRIÇÃO DA BANCADA EXPERIMENTAL
7.1 Introdução
Este capítulo é referente à descrição da bancada experimental, concebida para
simulação e estudo de defeitos em máquinas rotativas e validação do aplicativo desenvolvido.
Além disso, serão mostrados os sensores utilizados e de que forma os defeitos foram
induzidos na bancada de testes.
Antes de iniciar a descrição da bancada, é necessário entender como é realizada a
aquisição do sinal de vibração. A figura 7.1 apresenta um esquema do sistema de aquisição de
sinais, o qual é composto por um sensor de vibração, que neste caso é o acelerômetro; um
condicionador de sinais; uma placa de aquisição de sinais; e um computador com o software
de aquisição de sinais.
Figura 7.1 Esquema do sistema de aquisição de sinais de vibração
•
Condicionador de sinais: Alimenta o sensor, amplifica e filtra o sinal antes de enviar
para a placa de aquisição e ajusta a impedância elétrica.
•
Placa de Aquisição: Converte o sinal analógico em digital.
•
Computador com Software de aquisição de sinais: Interface onde são visualizados e
analisados os sinais.
85
7.2 Bancada experimental
A bancada experimental utilizada neste trabalho é apresentada na figura. 7.2. Esta
bancada é comercializada pela Spectra Quest Inc. e foi especialmente projetada para estudar o
comportamento dinâmico de rotor apoiado em mancais de deslizamento e/ou de rolamento,
permitindo a simulação de problemas de desbalanceamento, desalinhamento e outros
específicos ligados a um determinado componente, como, por exemplo, defeitos em
rolamentos. Os seus principais elementos são:
•
Controlador AC de velocidade variável com mostrador (display)
•
Motor AC de ½ HP
•
Acoplamento
•
Eixo
•
Tacômetro óptico
•
Disco rotativo com furos rosqueados para introdução do desbalanceamento
•
Dispositivo de carga do mancal
•
Anel de fixação para retenção do rotor ao eixo
•
Tanque integral da bomba de óleo
Figura 7.2 Bancada experimental
86
7.3 Cadeia de medição
A cadeia de medição é composta pelos seguintes itens:
•
3 Sensores de vibração (acelerômetros)
•
Condicionador de sinais
•
Placa de aquisição de sinais
•
Computador com software de aquisição de sinais.
7.3.1 Sensor de vibração
O sensor de vibração utilizado na bancada é o acelerômetro, do tipo piezoelétrico.
Segundo SOUZA (2007), o nome piezoelétrico vem do grego peizin, que significa
esmagar, achatar. É que os elementos piezoelétricos têm a propriedade de produzir uma
tensão elétrica em determinado eixo quando comprimido em outro. E vice-versa: se for
aplicado um sinal elétrico no eixo elétrico, ele vai produzir um alongamento mecânico no eixo
mecânico. O cristal comum de quartzo (dióxido de silício) apresenta essa propriedade e por
isso foi muito usado como cristais geradores de freqüências-padrão em radiofonia, para
microfones, fones e acelerômetros. Hoje os cristais de quartzo são criados em fornos com a
temperatura e pressão controlados, onde se obtém uma pureza sem a qual seria impossível
obter a precisão dos atuais transdutores. Algumas cerâmicas, como o titanato de bário,
também apresentam propriedades piezoelétricas, desde que submetidas a um tratamento
termoelétrico durante o processo de fusão. Estes últimos cristais são mais utilizados como
geradores de ultra-som devido à alta freqüência de ressonância mecânica aliada à alta
eficiência mecânica.
A figura 7.3 apresenta um corte num acelerômetro, no qual é mostrado o cristal, de um
lado apoiado no corpo do transdutor e de outro fixado a massa, também conhecida como
massa sísmica. Qualquer aceleração sofrida pelo transdutor obrigará a massa a comprimir ou
tracionar o cristal, que produzirá um sinal elétrico proporcional à força gerada na massa.
Apenas a componente da aceleração paralela ao eixo do transdutor é que produzirá o efeito
piezoelétrico; as outras componentes no plano perpendicular ao corpo do transdutor serão
87
ignoradas. Quando se deseja medir acelerações nos três eixos coordenados, deve-se utilizar
um transdutor triaxial que contém três cristais independentes perpendicularmente entre si e
fornece três tensões independentes de saída.
Figura 7.3 Esquema do acelerômetro piezoelétrico
Fonte: SOUZA, 2007
7.3.1.1 Características do acelerômetro utilizado na bancada
O acelerômetro utilizado na bancada é mostrado na Figura 7.4 e apresenta as seguintes
características:
•
Fabricante: Wilcoxon
•
Modelo: 784A
•
Tipo: Piezoelétrico ICP-PZT CERÂMICO
•
Sensibilidade axial: - 100mV/g +/- 20%
•
Sensibilidade transversal: - 3% da axial
•
Sensibilidade magnética: 50 µg/Gauss
•
Faixa de temperatura de operação: -50° C a 120° C
•
Alimentação: 12 VDC
Figura 7.4 Acelerômetro piezoelétrico,
modelo 784A.
Fonte: WILCOXON
A sensibilidade do sensor é um parâmetro importantíssimo na leitura do sinal, visto
que um analisador de sinais por ser um equipamento eletrônico, lê o sinal adquirido na forma
88
de tensão (Volts). No entanto, um dos parâmetros de medida de vibração é a aceleração.
Portanto, é necessário converter a unidade de volts para m/s². A relação é dada pela
sensibilidade do sensor. Neste caso, a sensibilidade do sensor é igual a 100 mV/g, ou seja,
para cada 0,1 V tem-se 9,81 m/s².
7.3.1.2 Posicionamento dos acelerômetros na bancada
Foram utilizados três acelerômetros para aquisitar o sinal de vibração, nas posições
axial, radial vertical e radial horizontal, conectados no mancal de rolamento, como mostrado
na figura 7.5.
Sensores de
vibração
Figura 7.5 Bancada experimental com sensores de vibração
7.3.2 Condicionador de sinais
O condicionador de sinais utilizado na bancada possui características, como: 16 canais
e um filtro analógico passa-baixa, com freqüência de corte igual a 2 kHz. A figura 7.6 mostra
o condicionador de sinais.
89
Figura 7.6 Condicionador de sinais
7.3.3 Placa de aquisição de sinais
A placa de aquisição de sinais é mostrada na figura 7.7 e apresenta as seguintes
características:
•
Fabricante: National Instruments;
•
Modelo: NI PCI-6024E;
•
16 Entradas analógicas;
•
200 kS/s, 12-Bit;
•
2 saídas analógicas 12-bit; 8 linhas digitais I/O; dois contadores 24-bit.
Figura 7.7 Placa de aquisição de sinais
Fonte: NATIONAL INSTRUMENTS
90
7.4 Indução de defeitos na bancada
7.4.1 Desbalanceamento de massa
O desbalanceamento foi provocado através da inserção de massas desbalanceadoras,
que correspondem a dois parafusos de 5,55 g e 5,56 g, aproximadamente, fixados no disco
rotativo do eixo, com uma excentricidade de 4 cm e 6 cm. A figura 7.8 mostra o parafuso e a
figura 7.9 apresenta o disco com os parafusos fixados.
Figura 7.8 Massa desbalanceadora
Massas
desbalanceadoras
Figura 7.9 Disco rotativo com as massas desbalanceadoras
91
7.4.2 Desalinhamento de eixo
Para provocar o desalinhamento utilizou-se um acoplamento desalinhado, o qual é
mostrado nas figuras 7.10 e 7.11.
Acoplamento
desalinhado
Figura 7.10 Acoplamento desalinhado na bancada
Figura 7.11 Acoplamento desalinhado
A figura 7.12 apresenta o acoplamento sem desalinhamento utilizado para a realização
das medições e posterior comparação de sinais.
92
Figura 7.12 Acoplamento sem desalinhamento
7.4.3 Defeitos nos rolamentos
Foram utilizados dois rolamentos, um com defeito na pista interna e outro com defeito
na pista externa, mostrados na figura 7.13.
Figura 7.13 Rolamento utilizado para indução de defeitos
Os rolamentos apresentam as seguintes características:
•
Fabricante: NYLA-K/MB Manufacturing
•
Modelo: M-BFK-1
•
Número de elementos rolantes (n): 8
•
Diâmetro dos elementos rolantes (D): 15,85 mm
•
Diâmetro primitivo (dm): 31,5 mm
•
Ângulo de contato (β): 0°
93
8 MEDIÇÕES E ANÁLISE DOS SINAIS DE VIBRAÇÃO
8.1 Introdução
Neste capítulo serão apresentados os seguintes itens: a calibração do sistema de
aquisição de sinais, as medições realizadas na bancada de teste e as análises dos sinais de
vibração, através do Nível Global, Fator de Crista, Curtose, Análise Espectral e Técnica do
Envelope.
8.2 Calibração do sistema de aquisição de sinais
A calibração foi realizada, no Laboratório de Calibração da Eletronorte (figura 8.1),
para cada acelerômetro de acordo com cada canal do sistema de aquisição de sinais.
Utilizou-se para este procedimento um gerador de sinal e um “shaker”. A calibração
consistiu em gerar um sinal, com uma determinada freqüência e amplitude, o qual era enviado
ao “shaker”, fazendo com que este vibrasse a uma freqüência e amplitude conhecidas. O sinal
de vibração aquisitado era lido no computador, e então estabelecidas as constantes de
calibração, as quais são mostradas na quadro 8.1.
Canal
Constante
0
326,20
1
325,20
2
328,85
Quadro 8.1 Constantes de calibração
94
Figura 8.1 Calibração do sistema
8.3 Análise dos sinais de vibração
Todos os defeitos foram medidos nas posições axial, radial horizontal e radial vertical,
pois como já foi dito no capítulo 3, o desbalanceamento é identificado através da análise do
sinal na posição radial, o qual deve ser comparado com o sinal na posição axial. Enquanto que
para o desalinhamento, estas diferentes posições do sensor são importantes para se identificar
o tipo de desalinhamento.
A freqüência de rotação da máquina é igual a 20 Hz. A função Janela utilizada para
análise dos sinais foi a Hanning. Como o condicionador de sinais possui um filtro analógico
passa-baixa, com uma freqüência de corte igual a 2 kHz, foi utilizada uma taxa de aquisição
de 4 kHz e um número de amostras igual a 8000.
95
8.3.1 Análise do defeito de desbalanceamento
O desbalanceamento foi identificado através da técnica análise espectral em
deslocamento. Além disso, são indicados os valores de nível global com e sem
desbalanceamento. Os gráficos no domínio do tempo e no domínio da freqüência, em
aceleração e em velocidade, podem ser vistos no APÊNDICE A.
A figura 8.2 corresponde ao sinal da máquina sem desbalanceamento e a figura 8.3
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição axial.
Figura 8.2 Espectro em deslocamento / sinal sem desbalanceamento / posição axial
Figura 8.3 Espectro em deslocamento / sinal com desbalanceamento / posição axial
A figura 8.4 corresponde ao sinal da máquina sem desbalanceamento e a figura 8.5
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
horizontal.
96
Figura 8.4 Espectro em deslocamento / sinal sem desbalanceamento / posição radial horizontal
20 Hz, freqüência de rotação da
máquina, indicando o
desbalanceamento
Figura 8.5 Espectro em deslocamento / sinal com desbalanceamento / posição radial horizontal
A figura 8.6 corresponde ao sinal da máquina sem desbalanceamento e a figura 8.7
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
vertical.
Figura 8.6 Espectro em deslocamento / sinal sem desbalanceamento / posição radial vertical
97
20 Hz, freqüência de rotação da
máquina, indicando o
desbalanceamento
Figura 8.7 Espectro em deslocamento / sinal com desbalanceamento / posição radial vertical
Nas posições radiais (figuras 8.5 e 8.7), observa-se um aumento da amplitude do sinal,
indicando o desbalanceamento de massa.
Na verdade, nos sinais das figuras 8.4 e 8.6, há desbalanceamento, mas é um
desbalancamento residual, que não compromete o bom funcionamento do equipamento.
Os valores de nível global da máquina com e sem desbalanceamento são mostrados no
quadro 8.2.
MÁQUINA SEM DESBALANCEAMENTO
Nível global (m/s²)
Axial
Radial Horizontal
Radial Vertical
0,85
0,38
0,44
MÁQUINA COM DESBALANCEAMENTO
Nível global (m/s²)
Axial
Radial Horizontal
Radial Vertical
0,67
0,56
0,67
Quadro 8.2 Valores de nível global
8.3.2 Análise do defeito de desalinhamento
O defeito de desalinhamento foi analisado também através da análise espectral em
deslocamento. Além disso, são indicados os valores de nível global com e sem
desalinhamento. Os gráficos no domínio do tempo e no domínio da freqüência, em aceleração
e em velocidade, podem ser vistos no APÊNDICE A.
A figura 8.8 corresponde ao sinal da máquina sem desalinhamento e a figura 8.9
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição axial.
98
Figura 8.8 Espectro em deslocamento / sinal sem desalinhamento / posição axial
Figura 8.9 Espectro em deslocamento / sinal com desalinhamento / posição axial
A figura 8.10 corresponde ao sinal da máquina sem desalinhamento e a figura 8.11
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
horizontal.
Figura 8.10 Espectro em deslocamento / sinal sem desalinhamento / posição radial horizontal
99
20 Hz, 40 Hz e 60 Hz.
Harmônicos da freqüência de
rotação da máquina, indicando o
desalinhamento.
Figura 8.11 Espectro em deslocamento / sinal com desalinhamento / posição radial horizontal
A figura 8.12 corresponde ao sinal da máquina sem desalinhamento e a figura 8.13
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
vertical.
Figura 8.12 Espectro em deslocamento / sinal sem desalinhamento / posição radial vertical
Figura 8.13 Espectro em deslocamento / sinal com desalinhamento / posição vertical
O desalinhamento pôde ser identificado através dos três harmônicos da freqüência de
rotação da máquina (figura 8.11), e foram significativos na posição radial horizontal,
indicando um desalinhamento paralelo, no plano horizontal.
100
Os valores de nível global da máquina com e sem desalinhamento são mostrados no
quadro 8.3
MÁQUINA SEM DESALINHAMENTO
Nível global (m/s²)
Axial
Radial Horizontal
Radial Vertical
0,85
0,38
0,44
MÁQUINA COM DESALINHAMENTO
Nível global (m/s²)
Axial
Radial Horizontal
Radial Vertical
2,06
5,83
2
Quadro 8.3 Valores de nível global
8.3.3 Análise dos defeitos nos rolamentos
As freqüências características dos defeitos em rolamento foram calculadas utilizando o
aplicativo desenvolvido, como mostra a figura 8.14. Os valores são apresentados no quadro
8.4.
Figura 8.14 Tela do aplicativo que calcula as freqüências características dos defeitos em rolamento
101
Componente
Freqüência (Hz)
Pista Interna
120,25
Pista Externa
39,75
Gaiola
4,97
Esfera
29,68
Quadro 8.4 Freqüências calculadas
Os defeitos nos rolamentos foram analisados por análise espectral e técnica do
envelope. São mostrados também os valores de nível global, fator de crista e curtose.
8.3.3.1 Análise do defeito na pista interna
Primeiramente analisou-se pelo espectro de freqüência em aceleração (figura 8.16). O
sinal foi filtrado utilizando um filtro passa-banda, com freqüências de corte iguais a 350 e 700
Hz, considerando que esta fosse a faixa de freqüências de ressonância, pois apresenta maior
amplitude. A figura 8.17 mostra o envelope do sinal e a figura 8.18 mostra o espectro do
envelope, onde pode ser identificada a freqüência de 120,5 Hz, relativa ao defeito provocado
na pista interna do rolamento, a qual foi previamente calculada como 120,25 Hz.
Figura 8.15 Domínio do tempo / posição axial / defeito na pista interna
102
Figura 8.16 Domínio da freqüência / posição axial / defeito na pista interna
Figura 8.17 Envelope / Domínio do tempo / posição axial / defeito na pista interna
120,5 Hz
Figura 8.18 Envelope / Domínio da freqüência / posição axial / defeito na pista interna
103
ROLAMENTO SEM DEFEITO
Axial
Nível global (m/s²)
0,85
Fator de crista
5,54
ROLAMENTO COM DEFEITO NA PISTA INTERNA
Axial
Nível global (m/s²)
5,94
Fator de crista
3,54
Curtose
3,24
Quadro 8.5 Valores de nível global, fator de crista e curtose
8.3.3.2 Análise do defeito na pista externa
Inicialmente analisou-se pelo espectro de freqüência em aceleração (figura 8.20). O
sinal foi filtrado utilizando um filtro passa-banda, com freqüências de corte iguais a 500 e 900
Hz, considerando que esta fosse a faixa de freqüências de ressonância do mancal, apesar de
não apresentar maior amplitude. A região que apresenta maior amplitude está entre 200 e 400
Hz, no entanto, as freqüências de ressonância tendem a ser mais altas que esses valores. A
figura 8.21 mostra o envelope do sinal e a figura 8.22 mostra o espectro do envelope, onde
pode ser identificada a freqüência de 39,5 Hz, relativa ao defeito provocado na pista externa
do rolamento, a qual foi previamente calculada como 39,75 Hz.
Figura 8.19 Domínio do tempo / posição axial / defeito na pista externa
104
Figura 8.20 Domínio da freqüência / posição axial / defeito na pista externa
Figura 8.21 Envelope / Domínio do tempo / posição axial / defeito na pista externa
39,5 Hz
Figura 8.22 Envelope / Domínio da freqüência / posição axial / defeito na pista externa
105
ROLAMENTO SEM DEFEITO
Axial
Nível global (m/s²)
0,85
Fator de crista
5,54
ROLAMENTO COM DEFEITO NA PISTA EXTERNA
Axial
Nível global (m/s²)
1,57
Fator de crista
4,02
Curtose
3,38
Quadro 8.6 Valores de nível global, fator de crista e curtose
106
9 CONCLUSÕES E RECOMENDAÇÕES
9.1 Conclusões
Através do estudo das falhas mecânicas mais comuns em máquinas rotativas e seus
efeitos de vibração e das técnicas de análise de sinais utilizadas para o tratamento de dados e
diagnóstico de defeitos, foi possível desenvolver o sistema aplicativo proposto para aquisição
e análise de sinais de vibração, tendo por base a plataforma LabVIEW.
Em virtude das medições realizadas na bancada experimental, pôde-se validar o
sistema aplicativo, verificando os diversos módulos desenvolvidos, tais como o de aquisição
de sinais, de visualização de sinais e das técnicas de análise de sinais.
De acordo com os defeitos induzidos na bancada, pôde-se avaliar as técnicas de
análise de sinais utilizadas no aplicativo. Com o desbalanceamento de massa e
desalinhamento de eixo avaliou-se o Nível global e Análise espectral; com os defeitos nos
rolamentos verificou-se o Nível global, Fator de crista, Curtose, Análise espectral e Técnica
do envelope. A única técnica que não pôde ser validada foi a do Cepstrum, visto que esta é
mais indicada para análise de defeitos em engrenagens.
Este aplicativo mostrou-se prático e viável, uma vez que instalado em um computador
portátil, que possua uma placa de aquisição de sinais, pode ser transportado com facilidade
para qualquer lugar. Além disso, requer pouco espaço no disco rígido do computador. E
apresenta um custo inferior em relação a equipamentos convencionais de medição.
9.2 Sugestões para trabalhos futuros
Considerando que a única técnica que não foi avaliada foi a do Cepstrum, recomendase:
•
Utilizar uma bancada que contenha um Redutor, para indução de defeitos nas
engrenagens e aplicação da técnica do Cepstrum;
•
Utilizar banco de dados para armazenamento dos sinais de vibração;
•
Aplicar a ferramenta virtual em um equipamento de maior porte.
107
REFERÊNCIAS
ALMEIDA, Márcio Tadeu; GÓZ, Ricardo Damião Sales. Análise de Vibrações I – Medidas
e Diagnósticos. Apostila do Curso de Análise de Vibração da FUPAI, Itajubá – MG. 2000.
ALMEIDA, Márcio Tadeu; GÓZ, Ricardo Damião Sales. Análise de Vibrações II –
Rolamentos e Engrenagens. Apostila do Curso de Análise de Vibração da FUPAI, Itajubá –
MG. 2000.
ANTONIOLLI, Edilar Bento. Análise Comparativa das Técnicas de Medição e Análise
das Vibrações, aplicadas na Manutenção Preditiva. 1999. 124 f. Dissertação (Mestrado em
Engenharia Mecânica) – Universidade Federal de Santa Catarina, Santa Catarina.
AQUINO, Marcelo Braz. Aplicação da Função Densidade de Probabilidade Beta no
Diagnóstico de Defeitos de Montagem em Redutores de Engrenagens. 2004. 100 f.
Dissertação (Mestrado em Engenharia Mecânica) – Universidade Estadual Paulista, São
Paulo.
BEZERRA, Roberto de Araújo. Detecção de Falhas em Rolamentos por Análise de
Vibração, 2004. 152 f. Tese (Doutorado em Engenharia Mecânica) – Universidade Estadual
de Campinas, São Paulo.
DIGITALIZAÇÃO de um sinal analógico. Disponível em:
<http://www.ceset.unicamp.br/~leobravo/ST%20050/Aula%20Digitaliza%E7%E3o%20de%2
0Sinais%20Anal%F3gicos%20.doc>. Acesso em: 07 Abr 2008.
MARÇAL, Rui F. M.; SUSIN, Altamiro A. Detectando falhas incipientes em máquinas
rotativas. Revista Gestão Industrial. v. 01, n. 021, p. 87-96, 2005. Disponível em:
<http://www.pg.cefetpr.br/ppgep/revista/revista2005/PDF2/Art07Vol1Nr2.pdf>.
Acesso em: 07 Abr 2008.
MECÂNICA das vibrações, p 114-170.
MESQUITA, Alexandre L. A et al. Detecção de falhas em rolamentos usando
transformadas tempo-freqüência – Comparação com análise de envelope. Mecânica
Computacional. v. 21, p. 1938-1954, 2002. Disponível em:
<http://www.cimec.org.ar/ojs/index.php/mc/article/viewFile/1066/1012>. Acesso em: 07 Abr
2008.
MESQUITA, Alexandre Luiz. Amarante. Sensores e Filtros. Apostila da disciplina Análise
de Vibrações em Máquinas – Universidade Federal do Pará, Belém – PA, 2008.
MESQUITA, Alexandre Luiz. Amarante. Processamento digital de sinais. Apostila da
disciplina Análise de Vibrações em Máquinas – Universidade Federal do Pará, Belém – PA,
2008.
NATIONAL INSTRUMENTS. LabVIEW – User Manual, 2000.
108
NUNES, Marcus Antonius da Costa. Diagnóstico de Defeitos em Rolamentos pela Técnica
do Envelope. 1989. 110 f. Dissertação (Mestrado em Engenharia Mecânica, área de
concentração Vibrações e Ruído) – Universidade Federal de Santa Catarina, Santa Catarina.
PACHOLOK, Mariano. Uso da termografia para avaliação do desalinhamento de eixos de
máquinas rotativas: Uma ferramenta auxiliar à análise de vibrações. 2004. 83 f.
Dissertação (Mestre em Engenharia Mecânica) – Pontifícia Universidade Católica do Paraná,
Paraná.
PONCI, Luciano Paiva; CUNHA, Paulo Mario Rodrigues. Previsão de Falha de
Rolamentos por Análise Espectral e de Envelope. Disponível em:
<http://www.teknikao.com/SDAV%20e%20Rolamentos.pdf>. Acesso em: 10 Dez 2007.
SOUSA, Walter dos Santos. Desenvolvimento de um Sistema aplicativo em LabVIEW
para o Monitoramento de Máquinas Rotativas com um Módulo de Balanceamento de
Rotores. 2005. 115 fp. Trabalho de Conclusão de Curso – Universidade Federal do Pará,
Pará.
SOUZA, Vitor Hugo Pereira. Projeto e Implementação de uma Bancada de Máquinas
Elétricas Rotativas para Monitoração da Geração e Diagnóstico. 2007. 247 f. Trabalho de
Conclusão de Curso – Universidade Federal do Pará, Pará.
BIBLIOGRAFIA COMPLEMENTAR
ALMEIDA, Márcio Tadeu; GÓZ, Ricardo Damião Sales. Curso de Balanceamento de
Rotores. Apostila do Curso de Análise de Vibração da FUPAI, Itajubá – MG.
BRÜEL & KJAER. Vibration measurement and analysis. 1998
CASTRO, Marcelo Miranda. Bombas Centrífugas – Noções de Operação e Manutenção.
Apostila de Gestão da Performance Total – Alunorte - Alumina do Norte do Brasil S.A.,
Barcarena – PA.
MCCONNELL, Kenneth G. Vibration Testing – Theory and Practice. New York: WileyInterscience, 1995.
SOEIRO, Newton Sure. Balanceamento de Rotores Rígidos. Apostila da disciplina
Vibrações Mecânicas – Universidade Federal do Pará, Belém – PA.
109
APÊNDICE A – Gráficos no domínio do tempo e da freqüência, em aceleração e em
velocidade, dos defeitos de desbalanceamento e desalinhamento
1 Desbalanceamento
1.1 Domínio do tempo
A figura A1 corresponde ao sinal da máquina sem desbalanceamento e a figura A2
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição axial.
Figura A1 Domínio do tempo / sinal sem desbalanceamento / posição axial
Figura A2 Domínio do tempo / sinal com desbalanceamento / posição axial
110
A figura A3 corresponde ao sinal da máquina sem desbalanceamento e a figura A4
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
horizontal.
Figura A3 Domínio do tempo / sinal sem desbalanceamento / posição radial horizontal
Figura A4 Domínio do tempo / sinal com desbalanceamento / posição radial horizontal
A figura A5 corresponde ao sinal da máquina sem desbalanceamento e a figura A6
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
vertical.
111
Figura A5 Domínio do tempo / sinal sem desbalanceamento / posição radial vertical
Figura A6 Domínio do tempo / sinal com desbalanceamento / posição radial vertical
1.2 Espectro em aceleração
A figura A7 corresponde ao sinal da máquina sem desbalanceamento e a figura A8
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição axial.
Figura A7 Espectro em aceleração / sinal sem desbalanceamento / posição axial
112
Figura A8 Espectro em aceleração / sinal com desbalanceamento / posição axial
A figura A9 corresponde ao sinal da máquina sem desbalanceamento e a figura A10
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
horizontal.
Figura A9 Espectro em aceleração / sinal sem desbalanceamento / posição radial horizontal
Figura A10 Espectro em aceleração / sinal com desbalanceamento / posição radial horizontal
113
A figura A11 corresponde ao sinal da máquina sem desbalanceamento e a figura A12
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
vertical.
Figura A11 Espectro em aceleração / sinal sem desbalanceamento / posição radial vertical
Figura A12 Espectro em aceleração / sinal com desbalanceamento / posição radial vertical
1.3 Espectro em velocidade
A figura A13 corresponde ao sinal da máquina sem desbalanceamento e a figura A14
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição axial.
114
Figura A13 Espectro em velocidade / sinal sem desbalanceamento / posição axial
Figura A14 Espectro em velocidade / sinal com desbalanceamento / posição axial
A figura A15 corresponde ao sinal da máquina sem desbalanceamento e a figura A16
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
horizontal.
Figura A15 Espectro em velocidade / sinal sem desbalanceamento / posição radial horizontal
115
Figura A16 Espectro em velocidade / sinal com desbalanceamento / posição radial horizontal
A figura A17 corresponde ao sinal da máquina sem desbalanceamento e a figura A18
corresponde ao sinal da máquina com desbalanceamento, com o sensor na posição radial
vertical.
Figura A17 Espectro em velocidade / sinal sem desbalanceamento / posição radial vertical
Figura A18 Espectro em velocidade / sinal com desbalanceamento / posição radial vertical
116
2 Desalinhamento
2.1 Domínio do tempo
A figura A19 corresponde ao sinal da máquina sem desalinhamento e a figura A20
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição axial.
Figura A19 Domínio do tempo / sinal sem desalinhamento / posição axial
Figura A20 Domínio do tempo / sinal com desalinhamento / posição axial
A figura A21 corresponde ao sinal da máquina sem desalinhamento e a figura A22
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
horizontal.
117
Figura A21 Domínio do tempo / sinal sem desalinhamento / posição radial horizontal
Figura A22 Domínio do tempo / sinal com desalinhamento / posição radial horizontal
A figura A23 corresponde ao sinal da máquina sem desalinhamento e a figura A24
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
vertical.
Figura A23 Domínio do tempo/ sinal sem desalinhamento / posição radial vertical
118
Figura A24 Domínio do tempo / sinal com desalinhamento / posição vertical
2.2 Espectro em aceleração
A figura A25 corresponde ao sinal da máquina sem desalinhamento e a figura A26
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição axial.
Figura A25 Espectro em aceleração / sinal sem desalinhamento / posição axial
Figura A26 Espectro em aceleração / sinal com desalinhamento / posição axial
119
A figura A27 corresponde ao sinal da máquina sem desalinhamento e a figura A28
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
horizontal.
Figura A27 Espectro em aceleração / sinal sem desalinhamento / posição radial horizontal
Figura A28 Espectro em aceleração / sinal com desalinhamento / posição radial horizontal
A figura A29 corresponde ao sinal da máquina sem desalinhamento e a figura A30
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
vertical.
120
Figura A29 Espectro em aceleração / sinal sem desalinhamento / posição radial vertical
Figura A30 Espectro em aceleração / sinal com desalinhamento / posição vertical
2.3 Espectro em velocidade
A figura A31 corresponde ao sinal da máquina sem desalinhamento e a figura A32
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição axial.
Figura A31 Espectro em velocidade / sinal sem desalinhamento / posição axial
121
Figura A32 Espectro em velocidade / sinal com desalinhamento / posição axial
A figura A33 corresponde ao sinal da máquina sem desalinhamento e a figura A34
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
horizontal.
Figura A33 Espectro em velocidade / sinal sem desalinhamento / posição radial horizontal
Figura A34 Espectro em velocidade / sinal com desalinhamento / posição radial horizontal
A figura A35 corresponde ao sinal da máquina sem desalinhamento e a figura A36
corresponde ao sinal da máquina com desalinhamento, com o sensor na posição radial
vertical.
122
Figura A35 Espectro em velocidade / sinal sem desalinhamento / posição radial vertical
Figura A36 Espectro em velocidade / sinal com desalinhamento / posição vertical
Baixar