Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 CARACTERIZAÇÃO DE PARTÍCULAS EM FLUÍDO UTILIZADO NA PERFURAÇÃO DE POÇOS DE PETRÓLEO EDUARDO NADALETO DA MATTA1, GUSTAVO FRANCKEVICIUS GURGEL MARANHÃO1, RICARDO DE SOUZA LOPES ORTIZ1; WÂNDERSON DE OLIVEIRA ASSIS1, RUBENS GEDRAITE2, ALESSANDRA DUTRA COELHO1, LÉO KUNIGK1 1. EEM - Escola de Engenharia Mauá, IMT - Instituto Mauá de Tecnologia Praça Mauá, 1 - B. Mauá - 09580-900 - São Caetano do Sul - SP E-mails: [email protected];[email protected];[email protected]; [email protected]; [email protected]; [email protected]; [email protected] 2. Universidade Federal de Uberlândia Av. João Naves de Ávila, 2121, 38400-902 - Uberlândia, MG E-mail: [email protected] Abstract The recovery of drilling fluid is essential in the oil and gas drilling under the environmental and economic perspectives. This fluid has suspended solids that come from the cutting action of the rock formations by drilling bit. In this sense, this paper proposes the development of an application capable of performing automated counting and characterization of gravels present in drilling fluids to allow the improvement and automation of drilling of petroleum wells process. For this, segmentation techniques and combinations with morphological filters are applied allowing particles identify in the drilling fluid and classify based on its dimensions. Keywords Computer Vision, Image Processing, Petroleum Industry, Drilling Fluid. Resumo O tratamento de fluído de perfuração é de suma importância no processo de perfuração de poços de petróleo, sob o ponto de vista operacional, ambiental e econômico. Este fluido possui sólidos em suspensão que têm origem na ação de corte das formações rochosas pela broca de perfuração. Nesse sentido, este trabalho propõe o desenvolvimento de um aplicativo capaz de realizar a caracterização e contagem automatizada dos detritos presentes nos fluídos de perfuração de forma a permitir o aprimoramento e automação do processo de perfuração de poços de petróleo. Para isso, são aplicadas técnicas de segmentação além de combinações com filtros morfológicos permitindo identificar e classificar as partículas presentes no fluído de perfuração conforme suas dimensões. Palavras-chave Visão Computacional, Processamento de Imagens, Indústria do Petróleo, Fluído de Perfuração. 1 monitorar o fluído de perfuração de poços de petróleo para detectar e analisar as características das partículas cortadas (“cascalhos”) (Guilherme et al., 2011) (Serapião et al., 2013). Dentro deste contexto, este trabalho foi desenvolvido visando obter um sistema que permite oferecer subsídios para permitir o aprimoramento e automação do processo de perfuração de poços de petróleo. Para isso, desenvolveu-se um aplicativo que serve para analisar, por meio de processamento digital de imagens, o fluído utilizado na perfuração e que retorna do ponto de escavação, de forma a obter um sistema capaz de fazer a contagem automatizada de detritos e a determinação dos respectivos tamanhos. Com essas informações, pode-se controlar de forma mais eficaz o processo de perfuração e melhorar o sistema de filtragem usando esteira vibratória visando retirada dos detritos e reaproveitamento do fluído. Pretende-se apresentar como principal contribuição em relação a trabalhos anteriores (Guilherme et al., 2011) (Serapião et al., 2013) o desenvolvimento de um algoritmo que incorpore a capacidade de identificar, quantificar e também classificar as partículas presentes no fluído. Introdução Desde a descoberta de indícios de petróleo na camada do pré-sal brasileiro em meados de 2006, novas tecnologias para tornar a sua extração mais segura e rentável vem sendo pesquisadas com maior intensidade. Na exploração do petróleo, uma das etapas mais onerosas, que representam entre 40% a 80% dos custos, consiste na perfuração dos poços. A perfuração de um poço de petróleo de 3000 m dura aproximadamente 3 meses de trabalhos ininterruptos e ainda assim, pode resultar em um poço seco. Entretanto isso não significa necessariamente o fracasso da exploração, pois cada poço perfurado pode melhorar o conhecimento geológico da área em exploração (Almeida, 2002). Trabalhos recentes abordam estudos sobre os equipamentos utilizados para a separação sólidolíquido do fluído de perfuração (Coelho et al., 2005) (Lobato et al., 2011) (Serapião e Mendes., 2009), (Grigorescu et al., 2008). Alguns trabalhos apresentam o desenvolvimento de algoritmos de processamento de imagem para 909 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 contidos no fluído. Segundo Pereira (2010), o futuro dos sistemas de controle de sólidos será aumentar a eficiência da remoção de sólidos. Para isso será necessário melhorar o conjunto de peneiras. Essa melhoria levará, consequentemente, ao aumento da vida útil das peneiras. Um dos principais objetivos no controle de sólidos é remover a maior quantidade de partículas grandes na primeira vez que esses sólidos são bombeados para fora do poço. Segundo ASME (2004), para avaliar a capacidade de remoção dos equipamentos é necessário considerar a origem dos sólidos e classifica-los de acordo com os tamanhos como mostrado na Tabela 1. Em condições normais, o fluído de perfuração é bombeado através da coluna de perfuração até a broca, retornando pelo espaço anular até a superfície, trazendo consigo os cascalhos cortados pela broca. O princípio de funcionamento do sistema desenvolvido consiste em utilizar uma câmera IP, com acesso remoto, para capturar imagens da esteira com os cascalhos transportados pelo fluído de perfuração oriunda do poço petrolífero que está sendo escavado. A abordagem propõe o tratamento das imagens capturadas por meio de filtros morfológicos adequados com o objetivo de se obter melhor precisão na determinação das características de granulometria do material sólido contido no fluído. Deve-se destacar que a produtividade do processo de perfuração depende da eficiência do adequado tratamento do fluído de perfuração com a retirada dos detritos. Assim, a análise correta dessas informações obtidas juntamente com a análise da composição do solo, proximidade da bolsa de petróleo e condições do ambiente, são de suma importância na perfuração de poços petrolíferos. Tabela1: Classificação de sólidos quanto ao tamanho Faixa de Tamanho Classificação Tipos de Partículas (µm) Maior Sólidos de perfuração, Cascalho que 2000 cascalhos, pedras 74 a Areia, sólidos de perfuraAreia 2000 ção Barita, silte, sólidos de Lama 2 a 74 perfuração finos Menor Bentonita, argila, sólidos Colóides que 2 de perfuração ultrafinos Fonte: Adaptado de ASME (2004) 2 Perfuração de Poços de Petróleo A exploração do petróleo é uma atividade essencialmente arriscada e de custo elevado. Mesmo com o alto grau de qualidade e confiabilidade dos estudos geológicos e geofísicos atuais, a certeza da existência de um reservatório só é possível após a perfuração do primeiro poço. Nesse processo utiliza-se uma sonda de perfuração composta essencialmente por uma torre de sondagem que serve como grua para baixar e içar as tubulações de aço contendo na ponta a broca de perfuração e uma casa de máquina que abriga os motores responsáveis pelo acionamento da grua, da broca e da bomba de fluído de perfuração. Os fragmentos de rocha gerados durante a perfuração são chamados de cascalho e são recolhidos continuamente por um fluído de perfuração (Pereira, 2010). Tradicionalmente, os fluídos são classificados de acordo com o seu constituinte principal em: fluídos à base de gás, à base de óleo e à base de água. (Amorin, 2003). No processo analisado o fluído é constituído de uma mistura de argila, água e produtos químicos injetados por bombas para o interior da coluna de perfuração através da cabeça de injeção e retorna à superfície pelo espaço anular formados pelas paredes do poço e pela coluna. Além de transportar os detritos da rocha perfurada, o fluído também limpa, lubrifica e arrefece a broca, reduz o atrito entre a coluna de perfuração e as paredes do poço, mantém a estabilidade do poço, além de evitar a erupção de gás, óleo ou água (Almeida, 2002). Por fim, o fluído de perfuração é separado dos cascalhos e, depois de devidamente tratado, retorna ao poço. A análise contínua dos cascalhos permite detectar os primeiros indícios de hidrocarbonetos nas formações rochosas. A utilização de técnicas adequadas pode reduzir os custos de manutenção de fluídos, de tratamento e descarte de resíduos. Atualmente utiliza-se um sistema de peneiras vibratórias para separar os sólidos Na superfície, o fluído permanece dentro de tanques, após receber o tratamento adequado. A trajetória do fluído de perfuração é apresentado na Figura 1. A Figura 2 ilustra o fluído com os cascalhos cortados pela broca sendo transportados por uma esteira. Figura 1. Trajetória do fluído de perfuração. Fonte: Amorin (2003). 910 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 prototipagem rápida (RP – Rapid Prototyping) para produção de objetos com formas complexas a partir de dados tridimensionais, rastreamento em tempo real e navegação de robôs móveis ou veículos não tripulados (Crawford et al, 2004) (Martins et. al, 2006), controle de processos de manufatura ou sistemas industriais (Denis, 2009), dentre outros. O reconhecimento e classificação de padrões é parte essencial em um sistema de análise de imagens, e tem por objetivo analisar determinado evento ou objeto e classificá-lo dentre várias categorias preestabelecidas. Em muitas aplicações o reconhecimento de padrões baseia na análise dos pixels de imagens coloridas. Nesse caso, as imagens são representadas por matrizes de pixels, sendo que cada uma das matrizes representam uma das cores primárias no padrão RGB (Red, Green e Blue) ou ainda combinações dessas matrizes. Em outras aplicações, mesmo que a câmera utilizada não obtenha imagens coloridas, a identificação ainda assim pode ser realizada pela análise dos níveis de cinza (greyscale). No caso específico da aplicação tratada nesse trabalho, onde o objetivo de identificar as dimensões dos cascalhos pode ser realizada com eficiência em imagens em tons de cinza. Uma das maneiras de transformar as matrizes de RGB em greyscale consiste na aplicação da transformação: Figura 2. Fotografia de uma esteira transportando os detritos extraídos do fluído de perfuração A recuperação do fluído de perfuração separando-o de cascalhos cortados é um assunto atual e de grande importância na operação de plataformas de perfuração de poços de petróleo, sob o ponto de vista ambiental e econômico. Normalmente, este fluído precisa ter as suas propriedades físicas readequadas para assegurar que o cascalho permaneça em suspensão (Guerreiro, 2012). Adicionalmente, por conter produtos poluentes, o fluído não pode ser diretamente descartado. A eficiência na remoção de sólidos pode ser computada de duas maneiras: eficiência de sólidos removidos propriamente dita e eficiência na conservação de líquido. Quanto maior a fração de sólidos removidos, maior a eficiência. Quanto maior a fração de sólidos no efluente de descarte, melhor é a eficiência de remoção. Ambos os aspectos devem ser considerados (Guerreiro, 2012). Um dos principais desafios nesse processo é caracterizar o tamanho das partículas e material sólido nas correntes de entrada e de saída da peneira. Assim, é possível ajustar condições operacionais, tais como: a vazão do fluído, a frequência e amplitude de vibração da esteira, a inclinação da tela de filtração para melhorar a eficiência do processo de retirada dos detritos e minimizar o seu desgaste. Por fim, além de remover fatores humanos do processo, a automação pode contribuir para melhorar a vida útil da esteira utilizada na separação e transporte destes detritos. Caso existam detritos muito grandes para determinado tipo de esteira o desgaste também será comparativamente maior que em uma esteira bem dimensionada. G[i , j ] = 0,2989 R[i, j ] + 0,5870 G[i , j ] + 0,1140 B[i , j ] (1) onde G é a matriz em greyscale, R, G e B são as matrizes no padrão RGB e i, j são respectivamente linha e coluna das matrizes, cujo número de termos depende da resolução da câmera utilizada. Algumas das principais técnicas utilizadas em aplicações de processamento de imagem digital onde o objetivo é a classificação a partir das dimensões do objeto incluem a "binarização" e a "conectividade". A "binarização" da imagem consiste na transformação da imagem para níveis branco e preto puro. Para isso são analisados os pixels da matriz greyscale comparando-os com um limiar (threshold) para determinar os níveis da imagem "binarizada" (preto ou branco); o limiar ou ponto de corte pode ser definido pela análise de histogramas. A "conectividade" consiste na análise da vizinhança dos pixels da imagem "binarizada" para verificar se estes estão conectados aos seus vizinhos. Para imagens bidimensionais, utilizam-se as vizinhanças de quatro (apenas os vizinhos mais próximos), seis (apenas para grades de pixels hexagonais) ou oito (todos os vizinhos) para definir a conectividade como ilustrado na Figura 3. 3 Processamento de Imagem A aplicação de técnicas de processamento de imagens no desenvolvimento de sistemas de visão computacional (Gonzalez e Woods, 2000), é uma área de pesquisa fascinante que tem produzido recentemente resultados de grande relevância para inúmeros segmentos da sociedade. Podemos citar, por exemplo, aplicações de identificação e segmentação de objetos ou imagens humanas (Fernandes e Gomes, 2002), reconstrução 3D de cenas reais, aplicações de 911 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 A B = {z| (B)Z, ⊆ A} (2) ou seja, a erosão de A por B é o conjunto de todos pontos z tal que B trasladado por z, está contido em A. - Filtro majority - Tem uma função semelhante ao filtro erode e remove de forma mais branda grupos de pixels isolados. Também serve para remover lacunas e penínsulas em regiões de zeros ou uns. Tem também a vantagem de não alterar o tamanho destas regiões, tal como ocorre com o filtro erode. O funcionamento básico do filtro consiste em, para cada pixel sendo analisado, se houver cinco ou mais pixels de mesmo valor em sua vizinhança sob a máscara, o pixel mantém seu valor, caso contrário ele recebe o valor de seu inverso. Portanto o filtro é resultante de: Figura 3. Vizinhança de pixels em imagens digitais 3.1 Filtros para Imagens Digitais Muitas vezes ao se capturar uma imagem digital em um ambiente real que apresenta diferentes tonalidades e fontes de luz diretas ou refletidas podem ocorrer imperfeições e interferências indesejadas, o que poderia prejudicar o processamento da imagem em questão. Com o objetivo de remover pontos destoantes de luz ou refinar bordas podem ser utilizados algoritmos digitais que permitem implementar diversos tipos de filtros. O funcionamento básico de um filtro morfológico consiste em analisar cada pixel da imagem alterando seu valor segundo um critério prédeterminado. Para realizar tal tarefa define-se um elemento estruturante com um ponto de ancoragem em seu centro. Embora o método possa produzir alguma deterioração nas regiões de borda ainda assim, na maioria dos casos, a utilização de filtros permite melhorar bastante a qualidade do algoritmo de classificação de objetos por processamento de imagens. Os filtros utilizados neste trabalho foram os seguintes: filtro erode, filtro majority, filtro fill e o filtro shrink, os quais serão explicados a seguir. É importante lembrar que qualquer filtro que se passe na imagem levará inevitavelmente a uma alteração da informação contida na imagem. - Filtro de erosão (erode)- Utilizado para remover pequenos detalhes irrelevantes em termos de tamanho (Gonzalez e Woods, 2002). Esta tarefa é cumprida utilizando-se uma máscara como mostrado na Figura 4. 1, se ∑ (B) Z ≥ 5 z 0, se ∑ (B) Z < 5 (3) Em oposição ao filtro erode, este filtro não apresenta o problema das bordas se a máscara utilizada possuir um tamanho menor que cinco por cinco, já que o valor limite do número de pixels considerados para a mudança de valor é de cinco, os pixels fictícios da região fora da imagem ainda serão minoria em relação aos outros pixels reais de dentro da imagem, exceto no único pixel em cada canto da imagem. - Filtro fill - Tem o objetivo de preencher quaisquer grupos de pixels rodeados por pixels de valor oposto. Com a utilização deste filtro é possível selecionar áreas específicas em que se deseje mudar o valor de grupos de pixels que estejam conectados, seja por uma conectividade de 4 ou 8 para imagens bidimensionais ou de 6, 18 ou 26 para cenas tridimensionais. Portanto o filtro é resultante de: X k = ( X k −1 ⊕ B ) I A C ; k = 1, 2, 3, ... (4) A Figura 5 mostra a máscara utilizada para o filtro fill. Figura 5. Máscara para o filtro fill Figura 4. Exemplo do processo de erosão aplicado a uma matriz binária - Filtro shrink - Serve para tentar reduzir áreas conectadas de mesmos valores por meio da remoção de pixels. Se o objeto, ou área, em questão possuir buracos, o filtro transforma-os em uma linha a meio caminho do buraco e da extremidade do objeto; se este for contíguo o filtro tenta transformá-lo num ponto. Com este filtro é possível identificar, isolar e No filtro de erosão para os conjuntos A e B, a B, é definido erosão de A por B, denotada por A por: 912 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 ligação entre o cliente FTP (File Transfer Protocol) presente na câmera e um servidor que será instalado no computador servidor. Com a utilização deste protocolo é possível fazer o envio dos arquivos presentes na câmera de modo relativamente seguro, com relativa imunidade à perda ou corrupção da informação. O modelo de comunicação FTP adotado é realizado como ilustrado na Figura 7. tentar reparar áreas ruidosas de uma imagem, ou seja, áreas com rápidas mudanças de valor entre pixels consecutivos. O algoritmo de realização deste filtro é apresentado em (Lam et al., 1992). 4 Materiais e Métodos 4.1 Hardware Para realizar o projeto foram utilizados os seguintes equipamentos: câmera digital e peneira vibratória. A câmera digital utilizada na captura das imagens que serão utilizadas é uma câmera IP (Internet Protocol) Feasso™ modelo f-ipcam03. A câmera possui processador de 32 bits, sensor CMOS de alta sensibilidade e imagem VGA com resolução de 640 x 480 pixels. Permite comunicação remota com um computador com rede 802.11(Wi-FI) e 802.3 (RJ45 10 base T). A câmera foi instalada em um suporte de metal para manter a distância entre a lente e a peneira, garantindo assim uniformidade na aquisição das imagens em diferentes situações de teste (Figura 6). A câmera está preparada para o ambiente agressivo em que estará instalada na indústria, sendo exposta ao sol e à chuva, e no caso de plataformas de perfuração, ao sal carregado pelos ventos marinhos. Não é, portanto, aconselhável a instalação de um microprocessador desprotegido no local para executar o algoritmo de análise. Assim, o uso de um simples WebCam na aplicação não é indicado pois necessitaria da presença de algum dispositivo com uma entrada USB no local para esta funcionar corretamente. Figura 7. Modelo de conexão FTP 4.2 Software O aplicativo desenvolvido no software Matlab™ divide-se em duas partes: um kernel de processamento, ou seja, um núcleo central encarregado da maior parte do processamento das informações provenientes da imagem, e uma interface amigável para a utilização do usuário. O algoritmo do aplicativo de processamento de imagens obedece à sequência apresentada no fluxograma da Figura 8. A interface gráfica desenvolvida (Figura 9) faz uso da ferramenta GUIDE (GUI Development Environment) incorporada ao Matlab™. Esta ferramenta é especificamente destinada à construção de interfaces de interação gráfica com o usuário final em aplicativos personalizados, encarregando-se de gerar todo o código de criação, manipulação e deleção de todos os elementos gráficos. A interface gráfica inclui diversas funcionalidades que incluem: - calibração do sistema; - seleção da fonte das imagens a serem utilizadas (externas, capturadas pela câmera, ou obtidas por meio de figuras armazenadas); - seleção dos filtros a serem utilizados, a sequência que deve ser adotada e o número de vezes em que cada filtro deve ser aplicado; - seleção do modo único ou contínuo; no modo contínuo as imagens são processadas continuamente em tempo real; - apresentação da imagem capturada e após o processamento; podendo essa última ser substituída pelo histograma ou um gráfico de barras mostrando o número de partículas identificadas nas respectivas classificações; Figura 6. Montagem para ensaios iniciais, com menores distâncias entre a câmera e a esteira, e nos testes finais, com instalação no teto, e mostrando também um exemplo de imagem capturada Na aplicação utilizou-se uma rede com protocolo TCP/IP (Transmission Control Protocol) para fazer a 913 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 5 Resultados Experimentais O sistema desenvolvido foi utilizado para processar imagens de diversos tipos e com número de pedras variável e com dimensões e colorações diferentes. Os testes foram realizados em um ambiente controlado com iluminação uniforme e a uma distância entre a lente e as amostras fixa de aproximadamente um metro e meio. As amostras presentes nestes testes não representam necessariamente os detritos provenientes da escavação de poços de petróleo, sendo apenas pequenas rochas e pedras. Contudo, os resultados obtidos permitem avaliar a eficiência que seria obtida num sistema real. As Figuras 10(a) a 10(c) apresentam imagens capturadas no sistema onde os círculos em amarelo delimitam a região de interesse especificada. Observa-se que na imagem 1(a) considerada como ideal, utiliza-se um fundo branco.Nota-se também que na Figura 10(c), propositalmente, as bordas da peneira vibratória são incluídas na análise, para observar-se o efeito da reflexão da parte metálica. As Figuras 10(d) a 10(f) ilustram o resultado obtido apenas com a conversão para greyscale e a "binarização". Todas as 5 pedras da Figura 10(a) foram localizados com facilidade. Contudo para as imagens 10(b) e 10(c), que contém respectivamente 43 e 72 pedras dentro da região delimitada, o resultado obtido apresentou contagem de 2012 e 636 pedras. Nessas imagens observa-se que o algoritmo não é eficiente, pois embora os objetos sejam identificados na imagem, sua classificação e o tamanho determinado são muito diferentes do real. Adicionalmente as perfurações na tela da peneira vibratória são identificadas como pedras e a reflexão de luz devido à parte metálica do fundo compromete o funcionamento do algoritmo de processamento de imagem. As Figuras 11(a) a 11(c) apresentam as mesmas imagens 10(a) a 10(c), mas processadas usando respectivamente combinações com os filtros erode, majority, fill e shrink. O algoritmo apresentou 100% de acerto na contagem das pedras das Figuras 11(a) e 11(b), respectivamente com 5 e 43 pedras e erros de medidas das dimensões menores que 10% para a maioria das combinações de filtros adotada. Contudo, a Figura 11(c) resultou em apenas 45 pedras. O baixo índice de acerto nesse caso ocorreu porque, como as pedras estão muito próximas uma das outras e apresentam mesma coloração, o algoritmo identifica várias pedras juntas como uma única com maior dimensão. Devemos salientar que, na aplicação prática, com a adequada delimitação da região de interesse, se possível excluindo as regiões das bordas onde há acúmulo das pedras, esses erros podem ser minimizados. Assim, como os cascalhos estarão em movimento na esteira e o processamento é realizado on line, pode-se considerar como solução a máxima contagem de pedras após certo período de análise. Adicionalmente, uma adequada calibração do sistema, com controle rigoroso da luminosidade e evitando Figura 8. Algoritmo completo do sistema de processamento de imagem Figura 9. Interface gráfica para o usuário - o sistema permite a calibração do número de pixels com a respectiva dimensão no sistema real, de forma a determinar as dimensões dos cascalhos com relativa precisão; assim, após identificados os detritos no fluído de perfuração e suas correspondentes dimensões torna possível classifica-los, tal como mostrado na Tabela 1. O sistema de calibração permite delimitar na imagem capturada, usando formas padronizadas com dimensões definidas pelo usuário, a região de interesse, sobre a qual deve ser realizado o processamento de imagem. A região de interesse é escolhida de forma manual de forma a delimitar a área de circulação do material a ser analisado. Essa característica permite eliminar regiões externas à esteira bem como excluir regiões próximas à borda. 914 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 de perfuração de poços de petróleo, mesmo com relativa alteração de iluminação do local. O tempo de resposta depende do número e combinação de filtros utilizados. Contudo observou-se que o sistema consegue processar cerca de 3 ou 4 imagens por segundo utilizando o MatlabTM, o que foi considerado suficiente para a aplicação. Embora eficiente, o algoritmo apresenta as seguintes limitações: - imprecisão nas medições quando há acúmulo de detritos, sobretudo nas bordas da peneira de vibração; - ainda é necessário calibração do sistema e intervenção do operador para selecionar a melhor combinação de filtros, para garantir melhor eficiência no algoritmo. sombreamento, espera-se obter resultados melhores na aplicação real. Referências Bibliográficas Almeida, E. L. F. D. (2002) Dinâmica Tecnológica das Industrias Energéticas. Universidade Federal do Rio de Janeiro. Rio de Janeiro. Amorin, L. V. (2003) Melhoria, Proteção e Recuperação da Reologia de Fluídos Hidroargilosas para Uso na Perfuração de Poços de Petróleo. Universidade Federal de Campina Grande. Campina Grande, PB. ASME - Shale Shaker Committee of the American Society of Mechanical Engineer Drilling Fluid Processing Handbook. Gulf Professional Publishing; 1 edition, December, 2004. Crawford, B. G., Downing, D.R. (2004) Design and Evaluation of an Autonomous, Obstacle Avoiding, Flight Control System Using Simulated Visual Sensors”, Anais do AIAA 2nd Unmanned Unlimited Technical Conference, Chicago, Illinois, EUA. Coelho, D. K., Roisenberg, M., Freitas Filho, P. J., Jacinto, C. M. C. (2005) Risk Assessment of Drilling and Completion Operations in Petroleum Wells Using a Monte Carlo and a Neural Approach Network Approach, WSC’05: Proceedings of the 37th Conference on Winter Simulation, Winter Simulation Conference, pp. 1892 1897. Denis, C.; Assis, W. O.; Coelho, A. D. (2009) Sorting Tomatoes for Industrial Processing Through of Computer Vision System Based on Neural Networks, COBEM 2009 – International Congress of Mechanical Engineering, Gramado, RS, 2009. Fernandes, L. A. e Gomes, P. C. R. (2002) Remoção do Fundo da Cena e Identificação da Silhueta Humana para a Captura Óptica de Movimento”, Anais do IX Seminário de Computação, SEMINCO, Blumenau, SC, Brasil, p.77-82. Gonzalez, R. C., e Woods, R. E. (2000), Processamento de Imagens Digitais, Editora Edgard Blücher Ltda. Grigorescu, S. D., Cepisca, C., Ghita, O. M., Portarniche, I., Grigorescu, E. (2008) Intelligent Figura 10. Imagens capturadas e após préprocessamento Figura 11. Imagens processadas após utilização de filtros combinados Deve-se destacar que o algoritmo determina as dimensões de todas as partículas identificadas, permitindo sua classificação tendo como referências as características apresentas na Tabela 1 com um ótimo índice de acerto, independente da luminosidade. 6 Conclusões O trabalho permitiu o desenvolvimento de um algoritmo de processamento de imagem que inclui diversas funcionalidades e que permite com relativa eficiência caracterizar os detritos presentes no fluído 915 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Control System for Monitoring Drilling Process. CIMMAS’08: Proceedings of the Seventh WSEAS International Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Stevens Point, Wisconsin, USA. World Scientific and Engineering Academy and Society (WSEAS), Cairo, Egypt, pp. 88-93. Guerreiro, F. S. (2012) Dimensionamento e especificação técnica de equipamentos a serem instalados em unidade experimental de tratamento de fluído de perfuração automatizada. Universidade Federal de Uberlândia. Uberlândia - MG. Guilherme, I. R., Marana, A. N., Papa, J. P., Chiachia, G., Afonso, L. C. S., Miura, K., Ferreira, M. V. D., Torres, F. (2011) Petroleum Well Drilling Monitoring Through Cutting Image Analysis and Artificial Intelligence Techniques. Engineering Applications of Artificial Intelligence, vol. 24, pp. 201-207. Lam, L.; Lee, S.-W.; Suen, C. Y. (1992) Thinning methodologies - a comprehensive survey. IEEE Transactions on Pattern Analysis and Machine Intelligence, v. 9, n. 14, p. 879, Sep. Lobato, F. S., et al. (2011) Identificação de Modelos para Unidades de Tratamento de Fluído de Perfuração. ENAHPE - IV Encontro Nacional de Hidráulica de Poços de Petróleo e Gás, Foz do Iguaçu - PR. Martins, M. P., Medeiros, F. L. L., Monteiro, M. V., Shiguemori, E. H., Ferreira, L. C. A. e Domiciano, M. A. P. (2006) Navegação Aérea Autônoma por Imagens, Anais do VIII Simpósio de Guerra Eletrônica, ITA, São José dos Campos, SP, Brasil. Pereira, M. S. (2010) Caracterização de cascalho e lama de perfuração ao longo do processo de controle de sólidos em sondas de petróleo e gás. Universidade Federal de Uberlândia Dissertação de Mestrado. Minas Gerais. Serapião, A. B. S., Mendes, J. R. P., Miura, K. (2013) Sistema de Visão Computacional para Detecção de Cascalho de Perfuração em Poços de Petróleo. 6º Congresso Brasileiro de P & D em Petróleo e Gás. Serapião, A. B. S., Mendes, J. R. P. (2009) Classification of Petroleum Well Drilling Operations. Sixty International Conference on Artificial Immune Systems. Lecture Notes in Computer Science, vol. 4628, Springer, Santos, SP, pp. 47-58. 916
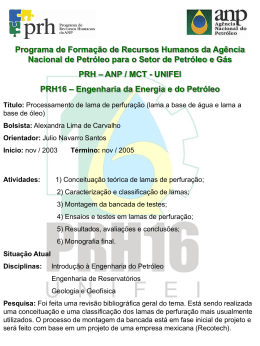
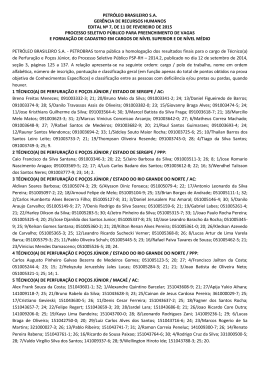
Download