Futebol de robôs, uma aplicação de robótica
RODOLFO MARENGO SOBREIRA
FRANCISCO ASSIS DA SILVA
RENATO LUCIANO ROS
{huper, chico, ros}@apec.unoeste.br
Estima-se que este trabalho é condizente com as expectativas e os objetivos
para a iniciação de um projeto de futebol de robôs através das investigações
realizadas. Em uma próxima fase para este projeto destaca-se a construção mais
aprimorada do software controlador responsável pela visão computacional e
pelas tomadas de decisão para movimentação do robô.
Apesar do aspecto à primeira vista de um mero brinquedo, na verdade a
proposta de uma partida de futebol jogada por robôs autônomos envolve
características de extrema complexidade sob a ótica da ciência robótica. Além
de serem necessários robôs especialistas, o duelo principal no futebol de robôs é
entre softwares, ou seja, a programação dos robôs, onde o time que conseguir
um melhor desempenho vence a partida. Partindo desta perspectiva, a pesquisa e
o desenvolvimento de times de futebol de robôs torna-se de importante valia no
meio acadêmico. Acredita-se que este projeto venha despertar o interesse dos
acadêmicos da Faculdade de Informática de Presidente Prudente para
continuação deste trabalho e por outras novas pesquisas nessa área da robótica.
Segundo Kraetzchmar et al (1998), “Dispositivos mecatrônicos, hardware
especializado para o controle de sensores e atuadores, teoria de controle,
interpretação e fusão sensorial, redes neurais, computação evolutiva, visão
computacional, e sistemas multi-agentes são exemplos de áreas de pesquisa
envolvidas nesse desafio” [BIANCHI00].
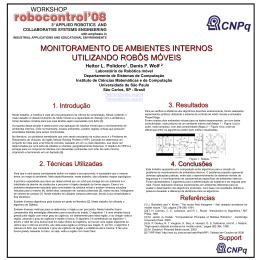
Figura 1 - Transmissor responsável por enviar dados ao robô
O presente projeto de pesquisa permitiu o aprendizado de tecnologias da área
de eletrônica não muito usuais no meio acadêmico, tais como: programação e
utilização de microcontrolador PIC e transmissão de dados via ondas de rádio
utilizando a porta serial do computador, apresentado na figura 1. O estudo da
inteligência artificial e visão computacional também são assuntos relevantes
para o projeto.
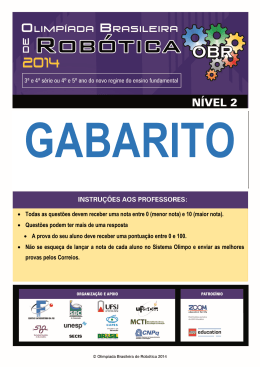
O objetivo principal deste trabalho é a pesquisa, o projeto e o desenvolvimento
de um robô jogador de futebol, apresentado na figura 2. Aliado ao projeto do
robô, objetiva-se desenvolver um software capaz de controlar o robô jogador
fornecendo comandos para realizar movimentos e jogadas.
O sistema controlador comandará o robô jogador através de sinais de rádiofreqüência, determinando a ação e reação deste. Foi construída uma interface
conectada à porta serial para a comunicação entre o computador e o robô. A
priori, o robô está constituído de um microcontrolador para interpretar os sinais
de rádio enviados pelo computador controlador. O software captura as imagens
de uma câmera de vídeo, e, a partir dessas imagens define as coordenadas do
robô, posição da bola e dimensões do campo. Estas coordenadas são utilizadas
pelo sistema na parte estratégica para definir os movimentos do robô e as
jogadas que serão posteriormente programas.
Algumas etapas seguidas para atingir o objetivo do trabalho são: estudo da
linguagem Assembly para a programação do microcontrolador PIC; estudo e
definição da captura de imagens; projeto de construção do robô;
desenvolvimento do circuito eletrônico para controle dos motores do robô;
construção do circuito de transmissão de sinais; e programação do software
controlador.
Figura 2 – Foto do Robô
Baixar