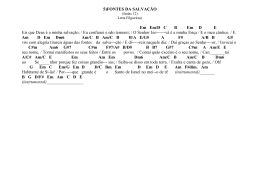
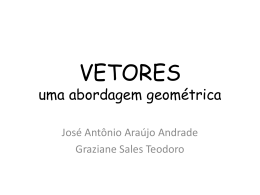
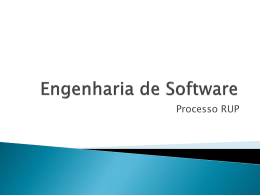
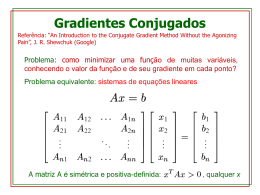
O método dos gradientes conjugados Francisco A. M. Gomes MT402 – Matrizes – junho de 2008 Funções quadráticas Chamamos de quadrática uma função f(x):n que pode ser escrita na forma f ( x ) x Ax b x c 1 2 T T onde Ann, bn e c. Exemplo de função quadrática 3 2 f ( x) x x 2 8 x c 2 6 1 2 T 200 150 100 50 0 -50 5 6 0 4 2 -5 0 -2 -10 -4 Curvas de nível da quadrática 50 45 Repare que as curvas de nível de f, neste 40 35 exemplo, são elipses. 30 25 20 15 Em cada curva do gráfico, encontramos 10 5 5 10 15 20 25 30 35 40 45 50 pontos com o mesmo valor de f. Gradiente O gradiente de uma função f(x) é dado por x1 f ( x ) f ( x ) x f ' (x) 2 x n f ( x ) Para um dado ponto x, o gradiente fornece a direção de maior crescimento de f(x). Exemplo de gradiente O gradiente é ortogonal à curva de nível. No exemplo, as setas apontam para o lado de fora das elipses, de modo que o ponto (2,-2) é o mínimo de f(x). Em (2, -2), temos f’(x) = 0. 4 3 2 1 0 -1 -2 -3 -4 -5 -6 -4 -3 -2 -1 0 1 2 3 4 5 6 Quadráticas e sistemas lineares De uma forma geral, escrevemos o gradiente de uma função quadrática f(x) na forma: f ' ( x ) 21 A Tx 21 Ax b Se a matriz A é simétrica, temos f ' ( x) Ax b Podemos tentar minimizar uma função quadrática f(x) igualando o gradiente a zero. Isso equivale a resolver o sistema Ax = b. Mínimo ou máximo? Entretanto, dependendo de A, o ponto crítico de f(x) pode um máximo local. 30 100 25 0 -100 20 -200 15 -300 10 -400 40 40 30 30 20 5 20 10 10 0 0 5 10 15 20 25 30 Pontos de sela O ponto crítico de f(x) também pode ser um ponto de sela. 30 400 25 300 200 20 100 0 15 -100 10 -200 40 30 40 30 20 5 20 10 10 0 0 5 10 15 20 25 30 Matrizes definidas positivas 8 6 4 2 0 -2 -4 -6 -8 -4 -3 -2 -1 0 1 2 3 4 5 6 Se a matriz A, além de simétrica, é definida positiva, então a função quadrática f(x) é um parabolóide voltado para cima, e a solução de f’(x) = 0, ou de Ax = b, é o ponto de mínimo de f(x). O método da máxima descida Também chamado de método do gradiente. Começa em um ponto x0 arbitrário Gera uma seqüência de pontos x1, x2, ... Caminha para o ponto de mínimo do parabolóide, x*, seguindo a direção do vetor –f´(x). Definições importantes Erro em xi: ei = x* – xi. Resíduo em xi: ri = b – Axi. O resíduo pode ser visto como o erro transformado por A: ri = b – Axi = A(x* – xi) = Aei. O resíduo também pode ser visto como a direção de máxima descida de f(x) em xi: ri = –f’(xi). Idéia do método Dado x0, podemos encontrar um ponto x1 que diminua o resíduo (ou f(x)), dando um passo na direção de –f ’(x0). Em outras palavras, podemos encontrar x1 definido como x1 = x0 + r0. O parâmetro é denominado comprimento do passo. Definindo o tamanho do passo Para encontrar o melhor valor de , minimizamos f(x) ao longo da direção definida por r0, ou seja, fazemos uma busca linear: minimiza f(x0 + r0) é determinado igualando a zero a derivada de f(x0 + r0) com relação a : r0Tr0 T r0 Ar 0 Algoritmo ri b Ax i riTri i T ri Ar i x i 1 x i i ri Este procedimento é repetido por várias iterações, até que xi esteja suficientemente próximo de x*. Taxa de convergência Infelizmente, o método do gradiente não possui, em geral, boa taxa de convergência. Na verdade, podemos provar apenas que f ( x i ) f ( x*) 1 f ( x 0 ) f ( x*) 1 2i onde é o número de condição de A. Assim, se A tem um número de condição alto, pouco podemos esperar deste método. Hiperelipsóides alongados Quando (A) é alto, as curvas de nível de f(x) são hiperelipsóides muito alongados. Para exemplificar isso, vamos resolver o sistema Ax = b com 100 10 A 10 1 . 001 19 b 1 Neste caso, (A) = 1.0201e+005. Hiperelipsóides alongados, parte 2 Para esse exemplo, o método da máxima descida fez 3825 iterações, usando ||r||/||b||<0,00001 como critério de parada e partindo do ponto [0, 0]T. 0.5 0.4 0.3 0.2 0.1 0 0 0.2 0.4 0.6 0.8 1 O método dos gradientes conjugados É um método que usa a mesma fórmula recursiva do método do gradiente, ou seja, xk+1 = xk + kdk, Mas que não usa como vetor direção o resíduo no ponto xk: dk rk = b – Axk. Idéia geral do método 1. 2. Vamos tentar encontrar, a cada iteração k, um vetor dk que seja linearmente independente dos anteriores d0, ..., dk-1; faça com que xk+1 minimize f(x) no espaço gerado pelos vetores d já definidos. (Naturalmente, esse espaço é o subespaço de Krylov K(A,d0,k)) Idéia geral do método, parte 2 Assim, xk+1 deve resolver o problema mink 1 f ( xk Dk w ) w onde Dk é a matriz cujas colunas são os vetores d0, ..., dk. Desta forma, ao final de n iterações, teremos minimizado f(x) em n, obtendo, assim, a solução do sistema linear Ax = b. Encontrando w Para obter uma expressão computável para xk+1, substituímos o termo xk+1 = xk + Dk w na fórmula de f(xk+1): f ( x k 1 ) 1 2 1 2 1 2 ( x k Dk w) T A ( x k Dk w) b T ( x k Dk w) T T x k Axk x k ADk w w TDkT ADk w b T x k b TDk w f ( x k ) rkTDk w 12 w TDkT ADk w. Encontrando w, parte 2 Derivando f(xk+1) com relação a w, obtemos um ponto de mínimo dado por 1 w (D AD k ) D r T k T k k Deste modo, x k 1 x k D k w x k D k (D kT AD k )1D kTr k . Vetores ortogonais Constatamos que rk+1 é ortogonal aos vetores di (colunas de Dk), pois D kTr k 1 D kTb D kT Ax k 1 1 D b D A ( x k D k (D AD k ) D r ) T k T k k T k T k T k D r D AD k (D kT AD k )1D kTr k 0 Assim, djTrk+1 = 0, para j = 1, ..., k. T k k Vetores ortogonais, parte 2 Se, nas iterações anteriores, os valores de xj, j = 1, ..., k, também foram obtidos de modo a minimizar f(xj-1 + Dj-1 wj-1), concluímos, por indução, que djTri = 0 para j < i. Substituindo este termo na expressão de xk+1, temos x k 1 x k Dk (DkT AD k ) 1 ek , onde = dkTrk e ek corresponde à késima coluna da identidade. Usando vetores A-conjugados Para simplificar a expressão de xk+1 e facilitar os cálculos, podemos tentar fazer com que a matriz DkTADk seja diagonal. Para tanto, basta exigirmos que os vetores dj sejam A-conjugados, ou seja, que diTAdj = 0 para i j. Como obter vetores A-conjugados 1. 2. Lembrando que a iteração do método é definida por x k 1 x k k d k , podemos obter um conjunto de direções A-conjugadas: Escolhendo d0 = r0 (como no método da máxima descida) Definindo rk como uma combinação linear de d0, ..., dk, de modo que k 1 d k r k kj d j . j 0 (1) Como obter vetores A-conjugados (2) Desta última equação, obtemos k 1 diT Adk diT Ark kj diT Ad j . j 0 Como as direções dj são A-conjugadas, kj d Tj Ark / d Tj Ad j Mas rkT ri1 rkT ri irkT Ad i, de modo que rkT A di (rkT ri rkTri1 ) / i Uma vez que, de (1), temos riTrj = 0, i j, Concluímos que kj = 0, j = 1,...,k – 2. Como obter vetores A-conjugados (3) Apenas k,k-1 0. Chamemos de k este valor Claramente k (1 / k 1 ) rkT rk / dkT1 A dk 1 Como k 1 dkT1rk 1 / dkT1 A dk 1 Obtemos k rkT rk / dkT1rk 1 E como, de (1), temos dkT1rk 1 rkT1rk 1 Chegamos a 2 2 k rk 2 / rk 1 2 Assim, a expressão de dk torna-se d k rk k d k 1 . Algoritmo Dados de entrada: 1. A matriz A (simétrica, definida positiva). 2. O vetor b. 3. 4. Uma aproximação inicial x0 da solução do sistema. Os parâmetros (tolerância do resíduo) e kmax (número máximo permitido de iterações). Algoritmo, parte 2 1 r0 b – Ax0 2 k 0; -1 0; d-1 0 3 Enquanto ||rk||2/||b||2 > e k kmax, 3.1 dk rk + k dk-1 3.2 k rkTrk/dkTAdk 3.3 xk+1 xk + kdk 3.4 rk+1 rk – kAdk 3.5 k r k 3.6 kk+1 2 2 / r k 1 2 2 Convergência do método Teoricamente, o método converge para a solução do sistema linear em n iterações. Entretanto, nem sempre isso acontece em virtude dos erros de arredondamento e cancelamento que fazem com que o vetor resíduo perca precisão; os vetores direção deixem de ser Aconjugados, ou seja, d iTAd j 0 , i j Isso ocorre quando A é mal condicionada. Exemplo com A bem condicionada » A = sprand(100,100,0.05,0.5) +0.1*speye(100); » A = A'*A; » condest(A) ans = 11.085 » b = rand(100,1); » x = pcg(A,b); pcg converged at iteration 15 to a solution with relative residual 9.8e-007 Exemplo com A mal condicionada » A = sprand(100,100,0.05,0.0001) +0.1*speye(100); » A = A'*A; » condest(A) ans = 3.7142e+008 » x = pcg(A,b); pcg stopped at iteration 20 without converging to the desired tolerance 1e-006... » x = pcg(A,b,1e-5,1000); pcg converged at iteration 232 to a solution with relative residual 2.6e-006 Taxa de convergência f (x i ) f (x*) 1 f (x 0 ) f (x*) 1 2i Assim, a distância entre f(xi) e f(x*) está limitada por um termo que é próximo de 1 se k(A) é grande. Felizmente, o método costuma convergir mais rápido do que podemos prever, principalmente quando precondicionado.
Baixar