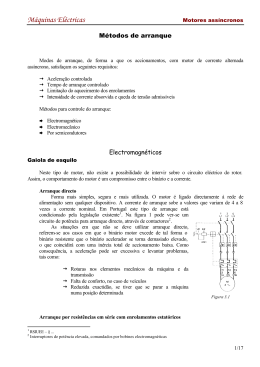
Máquinas Eléctricas Motores assíncronos Accionamento de máquinas Estudo do motor eléctrico, quando acoplado a uma máquina. A máquina accionada impõe duas condicionantes ao arranque: þ Binário resistente þ Inércia das massas 1. Binário resistente O conhecimento do comportamento do binário resistente, ao longo do processo de arranque, é fundamental para o estudo deste processo e para determinar o ponto de funcionamento estável – velocidade e potência nominais. T Binário motor Binário resistente O binário resistente é condicionado pelas resistências passivas que, vistas do eixo de accionamento, se traduzem no binário necessário a ser fornecido, para que aquelas sejam vencidas. Existem 4 mecanismos de fricção: „ „ „ „ 0 Ponto de funcionamento estável 10 % nS Figura 2.1 Coulomb – constante, para qualquer velocidade Estática – importante a velocidade nula Viscosa – originada por fluidos, é proporcional à velocidade Fluída – originada por fluidos, cresce mais rapidamente que a velocidade total Coulomb Viscos a Fluida Figura 2.1 As máquinas accionadas reais têm, em maior ou menor grau, estes 4 tipos de fricção. As figuras 2.3 a 2.6, representam os binários resistentes de vários tipos de máquinas. 1/10 Máquinas Eléctricas Motores assíncronos Veículos rápidos Máquinas ferramentas Compressor rotativo em carga Elevação Compressor alternativo em carga Veículos lentos Compressor rotativo em vazio Calhandras de plásticos Compressor alternativo em vazio Extrusoras de plásticos Figura 2.3 Figura 2.4 Bo mb as /V ent ila do res em car ga Moínhos de bolas s ore lad i t en / V io as vaz b m em Bo de os h oín M os ug ríf t n ce Moínhos de martelos Figura 2.5 Figura 2.6 Outras características de binários resistentes: Æ Irregularidade do binário – oscilações do binário resistente, referidas ao binário médio, que acontecem em máquinas com movimento alternado. São fontes potenciais de problemas de ressonância mecânica no meio de ligação da máquina ao motor. Æ Frequência de arranques – nº de arranques por unidade de tempo. São fonte de problemas porquanto aumentam a concentração térmica nos motores. Æ Inércia 2/10 Máquinas Eléctricas Motores assíncronos No anexo A, é fornecida uma tabela com estas características, para vários tipos de máquinas accionadas. Algumas máquinas mais usuais: TM Æ Elevadores Ascensores, montacargas e gruas O binário é praticamente constante. Possuem um tambor para converter o movimento rotacional em linear. Aplicam-se as seguintes expressões: v=ωr r v m F Tr = m g r Figura 2.7 quando exista um contrapeso (mcp) para compensar a carga m à qual se adiciona a carga da cabine (mc), vem: mcp = mc + 0,5 m, sendo o binário: Tr = (m + mc – mcp) g r A inércia que o elevador adiciona à inércia do motor é: J = (m + mc + mcp) r2 Nas gruas eliminar-se-ão os valores de mc e mcp , os quais não existem. Æ Bombas e ventiladores Exceptuando o binário de início (que oscila entre 5 e 20% do nominal), o binário resistente que opõem ao motor é uma função parabólica de 2º grau da velocidade: Tr = k n2 [n – rpm] A potência nominal de ambas as máquinas é: P = Q p/η P – potência [kW] Q – caudal [m3 /s] p – pressão total na boca (bomba ou do ventilador) [N/m2 ] η – rendimento (bomba ou ventilador) A expressão da pressão difere de bombas para ventiladores: ž Bombas p=hg π h – altura total gerada pela bomba com perdas de carga g – aceleração da gravidade (9,81) [m/s2] π – densidade do fluido [kg/m3] ž Ventiladores p=gh h – pressão total = estática + dinâmica 3/10 Máquinas Eléctricas Æ Motores assíncronos Bobinadoras e enroladoras Máquinas diversificadas, embora todas respondendo a um padrão geral, pelo qual o diâmetro da bobine cresce normalmente, tensionado com uma força constante, diminuindo a sua velocidade angular – processo de enrolamento. No processo de desenrolamento acontece o inverso. Assim: F = cte Tr T v = cte raio grande: - baixa velocidade angular - alto binário raio pequeno: - alta velocidade angular - baixo binário ω Tr = F r ω ω=v /r e Tr ω = F v = cte r – raio da bobine (num instante particular) F – tensão do enrolado v – velocidade linear do enrolado Já que a tensão e a velocidade linear de enrolamento são fixas. 2. Inércia das massas O momento de inércia, ou simplesmente inércia, é um conceito matemático que caracteriza as propriedades dinâmicas dos volantes. Intuitivamente sabe-se que entre dois volantes com a mesma massa, mas um deles mais largo axialmente e com menor diâmetro que o outro, se comportam diferentemente nas acelerações e desacelerações – o de maior diâmetro demora mais a acelerar e a desacelerar. De acordo com a figura 2.9, o corpo gira em torno do seu eixo, com velocidade ω. Sendo um corpo rígido, todos os seus elementos, de massa dm, se movem com a mesma velocidade angular. Em cada elemento de massa, verifica-se a equação do binário acelerador: dT = r ⋅ dF = r ⋅ dm ⋅ dv M M dt = r ⋅ dm ⋅ r ⋅ d ω = r ⋅ dm ⋅ d ω d TM dF M r 2 dt dt v dm obtendo-se o binário total, integrando a todo o volume do sólido: TM = ∫ dC M = ∫ r 2 ⋅ dm ⋅ dω = dω ⋅ ∫ r 2 ⋅ dm = J ⋅ dω dt dt dt Figura 2.9 Chamando inércia mássica, ou momento de inércia, de um corpo girante, ao integral: m J = ∫ r ⋅ dm 2 J – [kg.m2 ] 0 4/10 Máquinas Eléctricas Motores assíncronos Sistema com variação de velocidade Muitas vezes existe a necessidade de adequar a velocidade da máquina accionada com a velocidade do motor. Então, há que utilizar engrenagens, correias, polies, etc. Em princípio, não há escorregamento entre engrenagem motora e engrenagem accionada. Tal como se pode ver na figura 2.10, no ponto de f1 contacto, existe equilíbrio de forças – f 1 = f 2 – donde, TM poderemos igualar os binários motor e accionado: r r J dω 1 TM − r1 f1 = J1 J2 dt rf =J 2 2 2 dω dt f2 v Também a velocidade linear é idêntica no ponto de contacto: Figura 2.10 v = r1ω1 = r2ω 2 Donde, associando estas equações, vem: r T = J + ⋅ J r 2 1 M 1 2 dω ⋅ dt 1 2 ω T = J + ⋅ J ω 2 2 M 1 1 dω ⋅ dt 1 2 onde se verifica que a inércia J2 , no eixo de velocidade ω2 , se aproxima à inércia J1 , no eixo de velocidade ω1 , corrigida, no entanto, pela relação: r r 1 2 ω = ω 2 = i 2 2 1 sendo i, a relação de transmissão do sistema de engrenagens 2 Define-se inércia equivalente, referida ao eixo 1, como: J = J + J ⋅ ω ω 2 2 eq 1 2 1 5/10 Máquinas Eléctricas Motores assíncronos Arranque de máquinas No arranque de motores de indução assíncronos, as quantidades que influenciam o comportamento destas máquinas, são: þ Tempo de arranque þ Energia dissipada þ Frequência dos arranques Tempo de arranque Considerando a inércia constante (caso mais frequente): T − T = J ⋅ dω dt M r integrando, vem: ta = ω =ω n J ∫ T − T ⋅ dω ω =0 M r Nota: ∫ ... ≡ soma d ... ≡ diferença embora este integral não seja de cálculo complicado, a dificuldade coloca-se nas funções de TM(ω) e de Tr(ω), habitualmente complexas. Por conseguinte, quando as funções de binário referidas são desconhecidas, pode utilizar-se um método gráfico, explanado seguidamente: i) ii ) iii ) iv ) v) vi ) Dividir o leque de velocidade em intervalos iguais Ler, para o centro de cada intervalo de velocidade, os valores de TM e Tr Calcular a diferença de binários (Ta =TM - Tr) Dividir a inércia total J pelo binário de aceleração (Ta) Multiplicar pelo incremento1 de velocidade (obtém-se o incremento de tempo, para cada intervalo) Somar2 todos os incrementos (obtém-se o tempo total de aceleração) É dado um exemplo no anexo B. 1 2 dω = incremento de velocidade ∫(J/T) x dω 6/10 Máquinas Eléctricas Motores assíncronos se Ta é constante num intervalo [1 ; 2], vem: ta = %T J Tacel (ω 2 − ω1 ) %T 200 200 Tmotor 150 Taceleração 100 100 Tcarga 50 20 40 60 80 100 % Figura 2.11 20 40 60 80 100 % Figura 2.12 A integração da equação que dá o tempo de arranque, tem um caso particular, quando o binário motor tem a expressão: TM = Tmax 2 (s smax )+( smax s ) o binário resistente, neste caso particular, torna-se Tr =0, vindo a integração do tempo de arranque: ta = J ⋅ ω 0 1 − s2n ⋅ − smax ⋅ Lnep (sn ) 2 ⋅ Tmax s ⋅ smax definindo a constante de tempo de arranque como: TM = J ⋅ ω0 Tmax que se interpreta como o tempo necessário para arrancar, aplicando durante todo o tempo o binário máximo (Tmax), vindo então o tempo de arranque: TM ta = 2 2 1 − sn 2 ⋅ smax − smax ⋅ Lnep( sn ) 7/10 Máquinas Eléctricas Motores assíncronos para se determinar o tempo t, decorrido até chegar ao ponto de escorregamento s, bastará substituir ta por t e sn por s. 8/10 Máquinas Eléctricas Motores assíncronos Anexo A 9/10 Máquinas Eléctricas Motores assíncronos Anexo B Supondo conhecidas as curvas de binário motor e máquina accionada (fabricantes) Motor assíncrono, potência – 315 kW Velocidade da máquina accionada – 992 rpm Inércia conjunta – 70 kg.m2 TM - Tr Tmotor n 0 49,6 99,2 148,8 198,4 248,0 297,6 347,2 396,8 446,4 496,0 545,6 595,2 644,8 694,4 744,0 793,6 843,2 892,8 942,4 992,0 Tmáquina T aceleração dω tacumulado dt 1.750 350 1.400 10,39 0,52 0,52 1.830 100 1.730 10,39 0,42 0,94 2.010 175 1.835 10,39 0,40 1,34 2.275 340 1.935 10,39 0,38 1,71 2.600 560 2.040 10,39 0,36 2,07 2.965 835 2.130 10,39 0,34 2,41 3.450 1.170 2.280 10,39 0,32 2,73 3.800 1.560 2.240 10,39 0,32 3,05 3.750 2.000 1.750 10,39 0,42 3,47 3.000 2.500 500 10,39 1,45 4,92 4.000 3.500 1.000 900 2.500 800 velocidade [rpm] 3.000 2.000 1.500 1.000 500 700 600 500 400 300 200 100 0 1 2 3 T motor 4 5 6 T carga 7 8 9 10 T aceleração 0 0 1 2 3 4 5 tempo [s] 10/10
Baixar