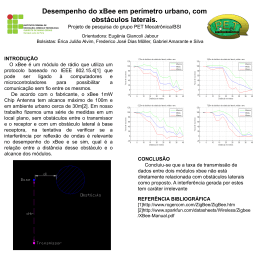
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA ELÉTRICA - TELECOMUNICAÇÕES PROJETO FÍSICO - SISTEMA AUTÔNOMO DE ALERTA DE ACIDENTES AUTOMOBILÍSTICOS (SA4) EM AMBIENTE URBANO E AUTOESTRADAS CURITIBA 2013 ALEXANDER AUGUSTO FROELICH ARTHUR GRANDINI RODELLA SISTEMA DE AUTÔNOMO DE ALERTA DE ACIDENTES AUTOMOBILÍSTICOS (SA4) EM AMBIENTE URBANO E AUTOESTRADAS Plano de projeto de Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Elétrica - Telecomunicações da Pontifícia Universidade Católica do Paraná. Orientadores: Prof. Luiz Augusto de Paula Lima Jr. Prof. Marcelo Eduardo Pellenz. CURITIBA 2013 i SUMÁRIO RESUMO ...................................................................................................................... ii ABSTRACT ..................................................................................................................iii LISTA DE FIGURAS .................................................................................................... iv LISTA DE TABELAS ..................................................................................................... v LISTA DE ANEXOS ..................................................................................................... vi 1. INTRODUÇÃO....................................................................................................... 1 2. DETALHAMENTO DO PROBLEMA ...................................................................... 2 3. TRABALHO A SER DESENVOLVIDO ................................................................... 4 3.1. Microprocessador............................................................................................... 5 3.2. GPS ................................................................................................................... 6 3.3. ZigBee................................................................................................................ 7 3.4. MP3 Player ........................................................................................................ 8 3.5. Bluetooth ............................................................................................................ 9 3.6. Programação do microcontrolador ................................................................... 10 3.7. Principio de funcionamento do SA4.................................................................. 10 3.8. Utilizando máquina de estados ........................................................................ 11 3.9. Aplicativo para celular ...................................................................................... 15 3.10. 4. Construção e funcionalidades dos pacotes ................................................... 17 PROCEDIMENTOS DE TESTE E VALIDAÇÃO DO PROJETO .......................... 18 4.1. Testes de bancada com o GPS........................................................................ 18 4.2. Testes de bancada com o MP3 Player ............................................................. 19 4.3. Testes de bancada com o Zigbee .................................................................... 19 5. VIABILIDADE ECONÔMICA ................................................................................ 19 Tabela 3 – Investimento do Projeto ......................................................................... 19 6. RESULTADOS OBTIDOS ................................................................................... 20 7. ANÁLISE DOS RISCOS ...................................................................................... 20 8. CRONOGRAMA DO PROJETO .......................................................................... 21 9. CONCLUSÃO ...................................................................................................... 22 10. REFERÊNCIAS................................................................................................ 24 ii RESUMO O número de acidentes automobilísticos é muito grande em todo o mundo. Partindo da ideia de que muitos acidentes poderiam ser evitados caso o motorista fosse alertado que uma situação inesperada se encontra à frente, este projeto tem como objetivo realizar uma comunicação entre veículos, para informar os motoristas caso haja uma situação de risco. O funcionamento consiste em, quando ocorrer um acidente, o veículo envolvido enviar uma mensagem para os outros veículos que estão nas proximidades, informando que ocorreu um acidente, e a que distância situa-se o incidente. Com esse alerta, o motorista estará ciente de que deve adotar uma conduta mais cuidadosa, para evitar novas colisões. Para isso, serão utilizados microprocessadores Arduino, módulos XBee Pro 900HP, para realizar a comunicação sem fio entre os veículos, módulos GPS, para calcular a distância entre um veículo e o local do acidente, um shield MP3, para emitir um aviso de alerta aos motoristas, evitando assim que eles precisem desviar a atenção da estrada, e um módulo Bluetooth, para realizar a comunicação entre o Arduino e um telefone celular. Palavras-chave: Arduino; prevenção de acidentes. ZigBee; GPS; Redes veiculares (VANETs); iii ABSTRACT The number of car accidents is high all over the world. Considering that a great amount of collisions could be avoided if the driver had been alerted that an unexpected situation would happen, this project has the objective of performing vehicular communication to inform drivers about such hazardous situations. The system consists in sending vehicles a message informing them that an accident has happened nearby, as well as its distance. With this alert, drivers will be aware that they must be careful, in order to avoid more collisions. To do this, the following material will be used: Arduino microprocessors, XBee 900HP modules, to perform wireless communication between vehicles; GPS modules, to calculate the distance between the vehicle and the place of the accident; a MP3 shield, to emit a sonorous alert, so the drivers’ attention will not be diverted from the road; and a Bluetooth module, to perform the communication between the Arduino and a cell phone. Key-words: Arduino; ZigBee; GPS; Vehicular Networks (VANETs); collision avoidance iv LISTA DE FIGURAS Figura 1 – Representação ilustrativa de um acidente automobilístico, onde os veículos envolvidos alertam os demais dentro de certo raio de distância. .................................. 4 Figura 2 - Diagrama de blocos do hardware deste projeto. ........................................... 5 Figura 3 - Microcontrolador Arduino Uno em vista (a) panorâmica e (b) superior.......... 6 Figura 4 - Representação ilustrativa do funcionamento de um GPS. ............................ 6 Figura 5 - Módulo GPS em vista (a) panorâmica e (b) inferior. ..................................... 7 Figura 6 - Módulo XBee Pro 900HP. ............................................................................. 7 Figura 7 - Shield XBee. ................................................................................................. 8 Figura 8 - Ilustração MP3 Shield. .................................................................................. 9 Figura 9 - Módulo Bluetooth blue SMiRF Silver............................................................. 9 Figura 10 - IDE de programação do Arduino ............................................................... 10 Figura 11 - Ilustração de funcionamento da máquina de estados ............................... 12 Figura 12 - Estrutura seletiva Switch Case utilizada no SA4 ....................................... 12 Figura 13 - Fluxograma estado AGUARDANDO GPS ................................................ 13 Figura 14 - Fluxograma estado OCIOSO .................................................................... 13 Figura 15 - Fluxograma estado ACIDENTADO ........................................................... 14 Figura 16 - Fluxograma estado ADICIONA ACIDENTE .............................................. 14 Figura 17 - Fluxograma estado ALERTADO ............................................................... 15 Figura 18 - AppInventor, parte gráfica......................................................................... 16 Figura 19 - AppInventor, parte lógica .......................................................................... 17 v LISTA DE TABELAS Tabela 1 - Estrutura do pacote.................................................................................... 18 Tabela 2 - Conteúdo de cada campo do pacote.......................................................... 18 Tabela 3 - Investimento do Projeto ............................................................................. 19 Tabela 4 - Análise FMEA ............................................................................................ 20 Tabela 5 - Cronograma de atividades ......................................................................... 21 vi LISTA DE ANEXOS 1 1. INTRODUÇÃO No Brasil, o número de acidentes automobilísticos em 2011 é de 188.925 ocorrências, incluindo acidentes com mortes, feridos, sem vítimas e não informados (DPRF, 2012). O número de mortes passa de 7000. Portanto, qualquer artifício que venha ajudar na diminuição desses dados é relevante. Muitos acidentes de trânsito poderiam ser evitados se um alerta de perigo fosse informado. Por exemplo, ao dirigir a noite em uma estrada mal iluminada, um motorista perde o controle do carro e colide contra uma árvore, deixando o carro no meio da pista. Se outros motoristas que estão em direção ao acidente receberem um alerta do perigo que se encontra em frente, muitos engavetamentos podem ser evitados. Nas cidades esse alerta pode ser útil para evitar congestionamentos, pois ao receber o alerta de acidente, o motorista pode usar uma rota alternativa para chegar ao seu destino. O objetivo deste trabalho é desenvolver e avaliar um sistema de alerta de acidentes capaz de informar aos motoristas dentro de certo perímetro a ocorrência de uma colisão e a gravidade da mesma, seja em ambiente urbano como em rodovias ou estradas. As sessões seguintes deste documento descreverão em detalhes o problema abordado neste trabalho (Seção 2), a proposta do projeto e as tecnologias utilizadas (Seção 3), os procedimentos de testes parciais do sistema (Seção 4), uma análise de riscos do projeto (Seção 6) e, por fim, o cronograma do mesmo (Seção 7). As conclusões são apresentadas na Seção 8. 2 2. DETALHAMENTO DO PROBLEMA Tanto no trânsito urbano como em rodovias, é possível verificar a ocorrência de acidentes e/ou engavetamentos devido a uma colisão primária de veículos. Esse fator pode prejudicar em diversas esferas os motoristas envolvidos, seja devido ao stress de um congestionamento, prejuízos financeiros devido a atrasos de entregas (em relação ao setor comercial), e até mesmo danos físicos devido a um possível acidente. Nesse contexto, a ideia central deste projeto consiste em informar a ocorrência de um acidente para todos os motoristas situados dentro de certo raio do mesmo, no intuito de evitar acidentes subsequentes e/ou engavetamentos. No estudo realizado por (VIGNESH e VIGNESH, 2012)., foi proposto um modelo onde o sistema teria controle sobre a aceleração, freios e também ao volante de veículos. Para a realização daquele projeto, utilizou-se o microcontrolador Arduino juntamente com módulos XBeeSeries 2. Estes módulos seriam instalados em postes de luz, que informariam a posição dos veículos para o sistema principal. O sistema principal por sua vez estabeleceria uma comunicação com módulos instalados nos carros, e poderia assumir o comando do veículo para evitar um acidente. Em (BUCHENSCHEIT et al., 2009), foi apresentado um sistema cujo principal objetivo seria auxiliar a mobilidade de veículos de emergência em meio ao tráfego urbano. Para isso, seria utilizada comunicação via rádio, para que os veículos pudessem se comunicar tanto com automóveis (para que estes possam desviar da rota do veículo de emergência) como com semáforos (para organizar o trânsito, diminuindo o tempo de chegada do veículo ao local de destino). Para a realização do protótipo, o desenvolvimento baseou-se no U²VAS (plataforma de experimentos para VANETs – Vehicular Ad Hoc Network). (ZALDIVAR et al., 2011).implementaram um aplicativo para o sistema operacional Android, que monitoraria o veículo através da interface OBD-II (OnBoardDiagnostics), e seria capaz de detectar a ocorrência de acidentes. Assim que um acidente fosse constatado, o smartphone enviaria e-mail, ou 3 mensagens de texto, para um destinatário pré-definido, e também realizaria uma ligação automática para o serviço de emergência. Durante seu mestrado, o engenheiro Eduardo Bertoldi desenvolveu um sistema anti-colisão de alerta ao motorista com o uso de estímulo auditivo e hepático. O objetivo desde projeto é evitar acidentes causados pelos pontos cegos. Com sensores equipados nas laterais do veículo, o sistema é capaz de detectar outros veículos a vinte metros de distância. Quando uma situação de risco é detectada, alarmes internos são acionados (um sonoro e outro vibratório), informando o motorista da possível colisão. O desenvolvimento do projeto foi realizado com o auxílio de jogos eletrônicos, e contou com a participação de voluntários (USP, 2011). Além dos estudos apresentados, há outros produtos com tecnologia similar (transferência de dados envolvendo veículos) que estão começando a ser comercializados, dos quais destacam-se o SINRAV, o SINIAV e Cohda Wireless. O SINIAV tem como objetivo fiscalizar os veículos, a partir de uma tecnologia que prevê a inserção de chips eletrônicos nos veículos para que os mesmos sejam identificados e rastreados, por meio de antenas estrategicamente posicionadas (SINIAV, 2011). O SINRAV é um equipamento antifurto, integrado ao carro, que permite o rastreamento do veículo. Este dispositivo realiza comunicação carro-infraestrutura via rede celular (IG, 2012). Outro produto, que está começando a ser comercializado, é o Cohda Wireless. Este produto realiza tanto comunicação entre veículos como de veículos com infraestruturas. A base de funcionamento nas duas situações é a mesma: os veículos se comunicam com outros veículos, ou infraestrutura, através de uma comunicação via rádio, e a comunicação ocorre o tempo todo. Com a comunicação entre veículos, o Cohda é capaz, além de sinalizar se há um acidente à frente, emitir um aviso informando que não é seguro realizar uma ultrapassagem. Já com a comunicação veículo-infraestrutura, ele é capaz de se comunicar com, por exemplo, um semáforo, e, a partir disso, informar se outro veículo desrespeitou a sinalização. Também é possível a comunicação com alguma infraestrutura próxima a uma escola, por exemplo, e ,quando algum veículo se aproxima, recebe o alerta de que é uma área escolar, e deve diminuir a velocidade (COHDA WIRELESS, 2012). 4 Dessa forma, não encontramos na literatura nenhum outro estudo para o desenvolvimento de um sistema de alerta de acidentes automobilísticos (SA4) com as mesmas características propostas por este projeto. 3. TRABALHO A SER DESENVOLVIDO Neste projeto, foi desenvolvido um sistema de detecção e alerta de acidentes automobilísticos em trânsito urbano e em autoestradas, tal como ilustra a Figura 1. Figura 1 – Representação ilustrativa de um acidente automobilístico, onde os veículos envolvidos alertam os demais dentro de certo raio de distância. Fonte: o autor, 2013. Após um veículo receber um alerta, o mesmo será capaz de retransmiti-lo, pois cada veículo possuirá um SA4, se transformando em uma nova fonte de transmissão, possibilitando que a área de veículos que serão alertados sobre o acidente seja muito maior, porém com certa limitação de distância do veículo acidentado. Para que o motorista não desvie sua atenção, o alerta é do tipo sonoro, informando à que distância se encontra o acidente. Além do alerta sonoro, há também um aplicativo para celular (sistema operacional android), que recebe as coordenadas do acidente, e o localiza em um mapa, mostrando com mais precisão onde ele ocorreu. 5 A parte física (hardware) desse sistema é apresentada em diagrama de blocos preliminar da Figura 2. Figura 2 - Diagrama de blocos do hardware deste projeto. Fonte: o autor, 2013. 3.1. Microprocessador Durante o processo de escolha do microprocessador, o Arduino Uno (Figura 3) atendeu todos os pré-requisitos do projeto, tais como: baixo custo, número de canais digitais/analógicos, memória flash, interface USB para gravação de códigos e compatibilidade com outros módulos eletrônicos utilizados no sistema por meio de shields. 6 (a) (b) Figura 3 - Microcontrolador Arduino Uno em vista (a) panorâmica e (b) superior. Fonte: Sparkfun, 2013. Outra vantagem observada no Arduino Uno é a sua tensão de alimentação, que pode ser de 6 a 20 Volts (ARDUINO, 2013; MULTILÓGICA SHOP, 2013). Isso porque os veículos possuem uma saída de alimentação com 12 Volts. 3.2. GPS Um dispositivo essencial para o projeto é o GPS, que fornece a posição atual e a posição do acidente. Figura 4 - Representação ilustrativa do funcionamento de um GPS. Fonte: TECHMUNDO, 2012. Para que o GPS funcione, é necessário que no mínimo quatro satélites estejam em linha de visão com o receptor que se encontrará nos veículos. Dessa forma, através da comparação de tempo em que o sinal que viaja na velocidade da luz foi enviado com o momento em que ele foi recebido, é 7 possível determinar a distância exata entre o receptor e o satélite (TECHMUNDO, 2012). No projeto do SA4, foi utilizado um módulo GPS ME-1000RW (Figura 5), podendo ser conectado diretamente em um pino digital do Arduino, e alimentado pelo pino de 5 Volts do próprio Arduino. (b) (a) Figura 5 - Módulo GPS em vista (a) panorâmica e (b) inferior. Fonte: ME Componentes e Equipamentos Eletrônicos, 2012. 3.3. ZigBee Uma importante etapa do projeto é realizar a comunicação entre os veículos. Para isso, foi projetada uma rede sem fio, utilizando módulos ZigBee. ZigBee é uma tecnologia de baixo custo desenvolvida para operar com baixo consumo de energia (ZIGBEE ALLIANCE, 2013). O módulo escolhido para realizar esta tarefa foi o XBee Pro 900HP (Figura 6). Figura 6 - Módulo XBee Pro 900HP. Fonte: Albacore, 2013 8 Este módulo possui banda de frequência de 902 a 928 MHz e taxa de transferência de até 200 Kbps. Uma importante característica que contribuiu para eleger a utilização deste módulo foi a elevada distância de transmissão (até 45 km, utilizando uma antena de alto ganho) (DIGI INTERNATIONAL, 2012). Para a comunicação com o do módulo com o Arduino, será necessário o uso de um shield XBee (Figura 7). Figura 7 - Shield XBee. Fonte: Multilógica, 2013 3.4. MP3 Player Para notificar o motorista de um acidente, foi utilizado um shield MP3 Player compatível com o Arduino (Figura 8), desta forma, o motorista não precisará desviar a sua atenção na estrada, sendo necessário apenas escutar a mensagem pré gravada em mp3 em um cartão micro SD. 9 Figura 8 - Ilustração MP3 Shield. Fonte: Sparkfun, 2013. 3.5. Bluetooth Para realizar a comunicação entre o microcontrolador Arduino e o celular, foi utilizada a tecnologia Bluetooth que permite comunicação sem fio entre dispositivos a curta distância. A função do Bluetooth é enviar as coordenadas do acidente para o celular. O módulo bluetooth utilizado foi o blue SMiRF Silver (Figura 9). Figura 9 - Módulo Bluetooth blue SMiRF Silver Fonte: Sparkfun, 2013. 10 3.6. Programação do microcontrolador O desenvolvimento do software que foi embarcado no microprocessador Arduino foi realizado através do Arduino IDE (Integrated Development Environment), em linguagem de programação C/C++ (Figura 9). Figura 10 - IDE de programação do Arduino Fonte: O autor, 2013. 3.7. Principio de funcionamento do SA4 Quando ocorre um acidente, o módulo do carro acidentado deve ser acionado. Ele então constrói uma mensagem com a coordenada do local do acidente. O veículo acidentado envia, através de um módulo ZigBee, mensagens de alerta contendo a coordenada do acidente, para outros veículos próximos do acidente (distância pré-determinada). Os veículos próximos 11 recebem a mensagem, que é transformada em um alerta sonoro (para não desviar a atenção do motorista), informando a que distância, aproximadamente, encontra-se o acidente. Também foi desenvolvido um aplicativo para sistema Android. Este aplicativo recebe as coordenadas do acidente, via Bluetooth, e abre um mapa (Google Maps), mostrando o local onde ocorreu o acidente. Cada veículo que recebe a mensagem transforma-se em uma nova fonte de difusão da mensagem até que uma determinada distância do acidente tenha sido atingida. Em caso de mais de um acidente, mensagens de todos os acidentes são transmitidas, porém o alerta sonoro avisa somente sobre o acidente mais próximo na direção do qual o veículo se movimenta. Caso o veículo acidentado se mova, o alerta de acidente é automaticamente interrompido. Por questões de conectividade (insuficiência de portas lógicas) são utilizados dois microcontroladores para comunicação com todos os módulos (GPS, ZigBee, Bluetooth e MP3). 3.8. Utilizando máquina de estados Como no SA4 existe vários hardwares periféricos (GPS, ZigBee, MP3 e Bluetooth) conectados ao Arduino, foi utilizado um diagrama de máquinas de estados para estruturar o código do programa de forma que o mesmo se torne mais intuitivo e organizado, facilitando na correção de eventuais bugs e erros. A (Figura 10) ilustra como foi desenvolvido essa máquina de estados. 12 Figura 11 - Ilustração de funcionamento da máquina de estados Fonte: O autor, 2013. Como o software do SA4 é programado em C++, foi adotado o uso de Switch-Case como estrutura seletiva, ilustrado na figura 11 a seguir. Figura 12 - Estrutura seletiva Switch Case utilizada no SA4 Fonte: O autor, 2013. Para entender as funções de cada estado do software do SA4, será ilustrado, a seguir, cinco fluxogramas e cinco algoritmos que ilustram o 13 funcionamento do estado AGUARDANDO GPS, OCIOSO, ACIDENTADO, ADICIONA ACIDENTE E ALERTADO, respectivamente. AGUARDANDO GPS Figura 13 - Fluxograma estado AGUARDANDO GPS Fonte: O autor, 2013. Enquanto o sinal do GPS não for estabelecido, o programa não muda de estado. Após o sinal ser totalmente estabelecido o software passa a executar as funções do estado ocioso. OCIOSO Figura 14 - Fluxograma estado OCIOSO 14 Fonte: O autor, 2013. No estado ocioso o programa apenas executa a leitura das coordenadas e verifica se chegou algum pacote de um acidente, ou se o usuário pressionou o botão de emergência. ACIDENTADO Figura 15 - Fluxograma estado ACIDENTADO Fonte: O autor, 2013. No estado acidentado, enquanto o botão de emergência permanecer ligado será transmitido vários pacotes com as coordenadas da localização do acidente ocorrido. ADICIONA ACIDENTE Figura 16 - Fluxograma estado ADICIONA ACIDENTE Fonte: O autor, 2013. As coordenadas de um novo acidente serão adicionadas em um vetor para armazenamento dos dados da localização. 15 ALERTADO Figura 17 - Fluxograma estado ALERTADO Fonte: O autor, 2013. Já no estado alertado, a mensagem com a localização dos acidentes presentes no vetor será reenviada até que atinjam um raio limite. Existe um monitoramento do zigbee para que quando chegar uma nova mensagem, o programa consiga identificar se mensagem corresponde com a localização de um acidente já conhecido, ou se a localização é de um acidente ainda não conhecido, no caso sendo necessária a mudança para o estado adiciona vetor. Quando todos os acidentes ultrapassarem o raio limite da propagação das mensagens, o programa volta para o estado ocioso. 3.9. Aplicativo para celular Para o desenvolvimento do aplicativo para celular, foi utilizada a ferramenta AppInventor, do Massachusetts Institute of Technology (MIT). 16 Esta é uma ferramenta que permite a criação de aplicativos para sistema operacional Android por meio de blocos, ou seja, não é necessário conhecimentos da linguagem de programação utilizada no sistema Android. Para criar um aplicativo, existem duas fases: a primeira (Figura 17) é a parte gráfica, onde são selecionadas cores do aplicativo e os componentes (botões, atalhos para outros aplicativos, etc.). Na segunda etapa (Figura 18), desenvolve-se a lógica do programa. Figura 18 - AppInventor, parte gráfica Fonte: O autor, 2013. 17 Figura 19 - AppInventor, parte lógica Fonte: O autor, 2013. Os componentes do aplicativo são: Quatro botões (conectar bluetooth, desconectar bluetooth, obter coordenadas e limpar) e um visualizador, para mostrar o mapa. A lógica do aplicativo consistem em receber coordenadas do módulo bluetooth, e abrir um mapa, indicando onde localiza-se o acidente. 3.10. Construção e funcionalidades dos pacotes O conteúdo do pacote que é transmitido através do protocolo API do Zigbee, entre os SA4 presentes nos veículos é composto por um vetor (em C++) de índice 26, ou seja, possuindo 26 campos. Para a transmissão dos dados no protocolo API, todos os campos possuem o mesmo tipo de variável contendo um byte. Portanto, como a latitude e longitude são pontos flutuantes, ou seja, um float, para a transmissão, as mesmas são transformadas em um 18 long e em seguida divididas em quatro bytes. A seguir, as Tabela 1 e 2, ilustram a estrutura do pacote e o conteúdo de cada campo respectivamente. Tabela 1 - Estrutura do pacote Tipo BYTE Conteúdo do Campo BYTE BYTE BYTE BYTE Overhead do protocolo API BYTE BYTE BYTE Latitude Longitude CRC 17 - 20 21 - 24 25 Índice 0 1 2 ... 16 Tabela 2 - Conteúdo de cada campo do pacote Overhead do Cabeçalho de informações para que o pacote seja em enviado em modo protocolo API API. (Start byte) (Tamanho do pacote) (Broadcast)... Latitude Coordenadas de uma localização Longitude Coordenadas de uma localização CRC Detecção de erros 4. PROCEDIMENTOS DE TESTE E VALIDAÇÃO DO PROJETO 4.1. Testes de bancada com o GPS Para avaliação do funcionamento do GPS, o receptor foi conectado ao Arduino, utilizando um pino para alimentação (5 volts) e outro pino digital qualquer para que o software recebesse os dados enviados pelo módulo GPS. 19 4.2. Testes de bancada com o MP3 Player Para verificar o funcionamento do MP3 Player, o mesmo foi conectado ao microprocessador Arduino. Um arquivo no formato mp3 foi inserido, por meio do cartão micro SD, e, utilizando o ambiente de desenvolvimento do Arduino, foi desenvolvido um código para que fosse possível reproduzir o arquivo mp3. 4.3. Testes de bancada com o Zigbee Para a realização de testes com o módulo ZigBee, será executada uma comunicação entre dois módulos XBee Pro 900HP, devidamente conectados ao Arduino através do shield Xbee. Para o teste, será desenvolvida uma lógica para que um módulo envie um comando simples ao outro (acender um LED, por exemplo). 4.4. Validação do Projeto Para validação do projeto, foi realizada uma simulação. Utilizou-se dois SA4, um com a função era enviar diferentes coordenadas, simulando acidentes a diferentes distâncias, e outro com função de receber e processar os dados. 5. VIABILIDADE ECONÔMICA A tabela 3 mostra o investimento feito para a realização do projeto Tabela 3 – Investimento do Projeto Item Quantidade Preço Cartão MicroSD 1 R$ 21,00 Componentes eletrônicos - R$ 32,00 20 Arduino Uno R3 2 2 X R$ 89,00 Shield MP3 Player 1 R$ 165,00 Shield XBee 1 R$ 74,00 Módulo XBee 1 R$ 153,47 Módulo GPS 1 R$ 100,00 - - R$ 723,47 Total O custo de venda do SA4 seria R$ 723,47 + 35% = 1198,75 (produto e instalação no veículo do cliente). 6. RESULTADOS OBTIDOS Com os testes em ambiente indoor, e com apenas dois SA4 um ao lado do outro, foi possível verificar o completo funcionamento do projeto, que através de simulações de acidente geradas por um SA4 compilado com coordenadas pré-determinadas, e com o auxilio do Serial Monitor do Arduino (Figura 9), foi possível testar todos os estados previstos. 7. ANÁLISE DOS RISCOS A verificação dos riscos existentes neste projeto final de curso foi realizada através da análise FMEA e relacionada na Tabela 4. Tabela 4 - Análise FMEA Item Arduino Modo potencial de falha Efeito em potencial S Quebrar Perda da função Perda da 8 Queimar Causa em potencial Colisão do veículo 8 Sobrecarga O Dispositivo de controle D RP N Ações recomend adas 3 Nenhum 10 240 3 Nenhum 10 240 Substituir o dispositivo Substituir o 21 função MP3 Player Módulo GPS Módulo XBee PRO 900HP Quebrar Queimar Quebrar Queimar Quebrar Queimar de corrente dispositivo Perda da função Perda da função 8 Colisão do veículo 8 Sobrecarga de corrente 3 Nenhum 10 240 3 Nenhum 10 240 Perda da função Perda da função 8 Colisão do veículo 8 Sobrecarga de corrente 3 Nenhum 10 240 3 Nenhum 10 240 Perda da função Perda da função 8 3 Nenhum 10 240 3 Nenhum 10 240 Colisão do veículo 8 Sobrecarga de corrente Substituir o dispositivo Substituir o dispositivo Substituir o dispositivo Substituir o dispositivo Substituir o dispositivo Substituir o dispositivo 8. CRONOGRAMA DO PROJETO A Tabela 5 mostra o cronograma de atividades deste projeto de final de curso. Tabela 5 - Cronograma de atividades Cronograma de atividades - 2013 Etapas Abril Maio Junho Julho Agosto Setembro Outubro Novembro 1 2 3 4 5 1. Testes de bancada com os módulos GPS, MP3 Player e ZigBee separadamente; 2. Projeto e início da programação do software do SAAA; 3. Implementação do software e testes com o sistema completo (módulos de hardware interligados) e inserção do hardware em caixa de protótipo; 4. Testes práticos do sistema em ambiente indoor; 5. Análise dos resultados e confecção do relatório final. 22 9. CONCLUSÃO Acidente automobilístico é um problema que afeta todos os países, e ainda não há nenhum equipamento implantado para reduzir o número de acidentes que ocorrem. O principal objetivo deste projeto é desenvolver um equipamento que possa auxiliar na redução no número de acidentes. Para isso, é proposta uma solução envolvendo GPS e uma rede sem fio, para realizar uma comunicação entre os veículos, informando se há um acidente e à que distância ele se encontra. O aviso ao motorista ocorre por meio de um reprodutor de mp3. A ideia inicial era conectar todos os dispositivos (XBee, GPS, MP3 e Bluetooth) em um único Arduino, pois, dessa forma, os gastos seriam menores, e o tamanho físico do projeto também, facilitando os testes. Porém, por motivos de insuficiência de portas lógicas, foi necessário adicionar mais um Arduino ao projeto. Desta forma, os dispositivos ficaram distribuídos. Um Arduino controla o Xbee e o GPS, e envia os dados para o outro Arduino, que contém o MP3 e o Bluetooth. Este projeto foi inscrito no concurso Renault Experience, sendo um dos três projetos escolhidos para representar a Universidade na etapa nacional. Durante o período do concurso, foram realizadas reuniões com funcionários da Renault, o que foi de grande valia, pois dessa forma houve uma proximidade entre o mundo acadêmico e o mundo profissional, e também foi possível compreender um pouco de como funciona uma indústria automobilística, e quais as etapas necessárias para a implementação de um projeto de um sistema, como o apresentado neste relatório, em um veículo. O SA4 possui um alto custo, e, por isso, ainda é um projeto inviável economicamente. Porém sua grande vantagem é ser um sistema autônomo, ou seja, independe de infraestrutura. Como trabalhos futuros, sugere-se uma possível migração para outra plataforma (Android, por exemplo), ou a compactação da tecnologia em um chip, reduzindo consideravelmente seu preço. Outro possível trabalho seria promover melhorias no algoritmo (fazer cálculo da distância baseado nas rotas das estradas) e melhorias no modo de acionar o módulo, como por 23 exemplo, integrar o botão com o pisca-alerta ou airbag, neste último tornando a ativação automática quando um acidente ocorre. Considerando o hardware envolvido e a rede sem fio para a transmissão e recepção dos dados, verifica-se que os conhecimentos necessários para realizar este projeto envolvem muitas disciplinas do curso de engenharia elétrica com ênfase em telecomunicações. 24 10. REFERÊNCIAS ALBACORE. Disponível em www.albacore.com.br Acesso em 15 abr. 2013 ARDUINO. Disponível em http://arduino.cc/en/ Acesso em 18 abr. 2013 ARDUINO. Arduino Uno. Disponível em: <http://arduino.cc/en/Main/ArduinoBoardUno>. Último acesso em 19 abril 2013. COHDA WIRELLES. Disponível em http://www.cohdawireless.com/ Acesso em 12 jun. 2013 DEPARTAMENTO NACIONAL DE INFRAESTRUTURA DE TRANSPORTES. Número de Acidentes por Gravidade de Ocorrência. Disponível em: http://www.dnit.gov.br/rodovias/operacoes-rodoviarias/estatisticas-deacidentes/quadro-0101-numerodeacidentesporgravidade-anode2011.pdf Acesso em 17 abr. 2013 IG. Entenda como funcionará o chip de identificaçãodo veículo. Disponível em <http://carros.ig.com.br/especiais/entenda+como+funcionara+o+chip+de+identif icacao+do+veiculo/4448.html> Acesso em 20 nov. 2013 MULTILÓGICA. Disponível em: http://multilogica-shop.com/ Acesso em 15 abr. 2013 MULTILÓGICA. Arduino Uno R3. Disponível em: <http://multilogicashop.com/Arduino-Uno-R3>. Último acesso em 19 abril 2013. SINIAV. Disponível em <http://siniav.net/> Acesso em 20 nov. 2013 TECHMUNDO. O Que é GPS. Disponível em www.tecmundo.com.br/conexao/215-o-que-e-gps-.htm Acesso em 15 abr. 2013 25 USP. Sistema anticolisão reduz acidentes causados por distração. Disponível em http://www.usp.br/agen/?p=73220 Acesso em 23 jun. 2013 XBEE DATASHEET. Disponível em <www.digi.com/pdf/ds_xbeepro900hp.pdf Acesso em 18 abr.2013> ZIGBEE ALLIANCE. Disponível em: http://www.zigbee.org Acesso em 18 abr. 2013
Download