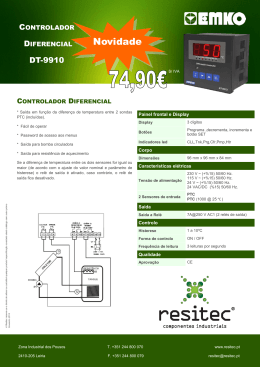
UNIVERSIDADE FEDERAL DE OURO PRETO – UFOP ESCOLA DE MINAS – EM COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO – CECAU CONFIGURAÇÃO E PROGRAMAÇÃO DE UMA REDE DEVICENET PARA UM CCMI MONOGRAFIA DE GRADUAÇÃO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO BRUNO CÉSAR SOARES KFOURI CAETANO Ouro Preto, 2009 II BRUNO CÉSAR SOARES KFOURI CAETANO CONFIGURAÇÃO E PROGRAMAÇÃO DE UMA REDE DEVICENET PARA UM CCMI Monografia apresentada como um dos requisitos para obtenção do título de Bacharel em Engenharia de Controle e Automação. Orientadora: Profª. Drª. Karla Boaventura Pimenta Ouro Preto, Dezembro de 2009 III IV AGRADECIMENTOS À minha tia Glória, aos meus pais e irmãos que, com muito carinho e apoio, não mediram esforços para que eu chegasse até esta etapa de minha vida, e sem eles esta conquista não seria possível. À professora e orientadora Karla Pimenta por seu apoio e inspiração no amadurecimento dos meus conhecimentos e conceitos que me levaram a execução e conclusão desta monografia. A todos os professores e funcionários da UFOP, que foram tão importantes na minha vida acadêmica. Aos amigos pelo constante companheirismo nos árduos momentos de dúvida e desespero, tanto nos agradáveis momentos de distração. Ao Luiz da Mata pelo conhecimento técnico e pelo empréstimo dos equipamentos utilizados durante este trabalho. A todas as repúblicas, botecos e rocks que apenas Ouro Preto pode proporcionar. À inesquecível e gloriosa Escola de Minas. V EPÍGRAFE “Às vezes... boas decisões são comprometidas por más respostas emocionais.” Benjamin Linus (LOST) VI RESUMO O advento das redes industriais ocasionou grandes transformações nos processos industriais. A constante evolução dos sistemas de automação industrial possibilitou mais dinamicidade aos processos. A possibilidade de obter grande quantidade de informação dos processos em tempo real, combinada com a versatilidade e facilidade de manutenção, tornou imprescindível o emprego das redes industriais nos mais diversos setores. Os motores elétricos representam uma parcela significativa entre os elementos utilizados na indústria, sendo que os mesmos necessitam de um sistema de acionamento que seja seguro e fácil operação e manutenção. Desta necessidade surgiram os CCM, responsáveis pelo acionamento e manobra de motores elétricos. Neste trabalho é apresentada a programação em Ladder para um relé E3-Plus instalado numa gaveta para CCMI, e a configuração de uma rede DeviceNet responsável pela comunicação do CLP com o relé. O programa implementado consiste no acionamento de um ponto de saída do relé, e na leitura de alguns valores fornecidos como: corrente de fase, falta de terra, falha de comunicação, etc. São expostas também as diferenças físicas e operacionais entre um CCM e um CCMI. PALAVRAS-CHAVE: CLP, Redes Industriais, DeviceNet, Motor Elétrico, CCM, CCMI, Ladder. VII ABSTRACT The advent of industrial networks caused major changes in industrial processes. The constant developments of industrial automation has made possible more dynamic processes. The possibility to acquire large amounts of information from real-time processes, together with the versatility and ease of maintenance, make essential to use of industrial networks in the more several industrial sectors. The electric motors represent one significant portion between the more used industrial devices, and they require a drive system that is safe and easy operation and maintenance. From this need appear the MCC, accountable for triggering and maneuver of electric motors. In This work been presented one Ladder programming for a relay E3-Plus installed in a drawer for IMCC, and configured a DeviceNet network responsible for communication of relay with the PLC. The program implemented is responsable for turn on one output from the relay, and read some values provided as: phase current, earth fault, failure of communication, etc. They also exposed the physical and operational differences between a MCC and a IMCC. KEY-WORDS: CLP, Industrial Networks, DeviceNet, Electric Motors, MCC, IMCC, Ladder. VIII SUMÁRIO LISTA DE FIGURAS ......................................................................................................X LISTA DE TABELAS.................................................................................................... XI LISTA DE ABREVIAÇÕES......................................................................................... XII I – INTRODUÇÃO .......................................................................................................... 1 1.1 – Justificativas ........................................................................................................ 1 1.2 – Metodologia ......................................................................................................... 2 II – INTRODUÇÃO AUTOMAÇÃO .............................................................................. 3 III – MOTORES ELÉTRICOS......................................................................................... 4 3.1 – Motores de Corrente Alternada ........................................................................... 6 3.1.1 – Motor de Indução Assíncrono ...................................................................... 6 3.1.2 – Motor Síncrono ............................................................................................. 7 3.2 – Motores Mais Utilizados na Indústria ................................................................. 7 3.2.1 – Motor com rotor em gaiola de esquilo.......................................................... 7 3.2.2 – Motor de rotor bobinado ............................................................................... 8 IV – O CONTROLADOR LÓGICO PROGRAMÁVEL .............................................. 10 4.1 – Arquitetura básica de um CLP........................................................................... 11 4.2 – O Processador .................................................................................................... 12 4.3 – Sistema de memória........................................................................................... 13 4.3.1 – Memória do Sistema de Operação .............................................................. 13 4.3.2 – Memória de Aplicação ou Memória de Usuário ........................................ 14 4.4 – Sistema de Entrada e Saída ................................................................................ 15 4.5 – Fonte de Alimentação ........................................................................................ 16 4.6 – Terminal de Programação .................................................................................. 16 V – A REDE DEVICENET............................................................................................ 18 5.1 – Protocolo DeviceNet.......................................................................................... 20 5.1.1 – Modos de Comunicação ............................................................................. 21 5.1.2 – Arquivo de Configuração ........................................................................... 23 5.1.3 – A camada de link de dados (Data link layer) ............................................. 23 5.2 – Camada Física e Meio de Transmissão ............................................................. 24 5.2.1 – Cabos .......................................................................................................... 25 5.3 – Topologia da rede .............................................................................................. 28 VI – CENTRO DE CONTROLE DE MOTORES ......................................................... 29 VII – LINGUAGENS DE PROGRAMAÇÃO .............................................................. 35 7.1 – Ladder ................................................................................................................ 37 7.1.1 – Estrutura da Linguagem Ladder ................................................................. 37 VIII – MONTAGEM ...................................................................................................... 43 8.1 – Principais Elementos Empregados na Montagem ............................................. 44 8.1.1 – CLP Allen-Bradley FlexLogix 5434 .......................................................... 44 8.1.2 – Relé de Sobrecarga em Estado Sólido E3-Plus .......................................... 45 8.2 – Configuração e Programação............................................................................. 47 8.2.1 – RSLogix 5000 ............................................................................................. 47 8.2.2 – RSLinx ........................................................................................................ 48 8.2.3 – RSNetworks for DeviceNet ........................................................................ 49 8.3 – Configuração da Rede DeviceNet e do Relé E3-Plus........................................ 50 8.3.1 – Configuração do Relé E3-Plus ................................................................... 52 8.3.2 – Configurando o Scanner 1788-DNBO ....................................................... 55 8.4 – Programação no RSLogix 5000 ......................................................................... 57 IX – CONCLUSÕES E SUGESTÃO PARA TRABALHOS FUTUROS..................... 64 IX REFERÊNCIAS BIBLIOGRAFICAS ........................................................................... 65 X LISTA DE FIGURAS Figura 2.1 – Diagrama de Blocos de um Sistema de Automação. ................................... 3 Figura 3.1 – Constituição de um Motor Elétrico de CA Rotor Gaiola de Esquilo. .......... 8 Figura 4.1 – Diagrama de Blocos do CLP. ..................................................................... 12 Figura 4.2 – Ciclo de Varredura. .................................................................................... 13 Figura 4.3 – Estrutura Básica do Sistema de Memória .................................................. 13 Figura 5.1 – A DeviceNet e a Faixa de Aplicação das Redes de Campo. ...................... 20 Figura 5.2 – DeviceNet Como Parte do Modelo CIP OSI. ............................................. 21 Figura 5.3 – Formato do Frame de Dados. ..................................................................... 23 Figura 5.4 – Estrutura do Sinal DeviceNet. .................................................................... 24 Figura 5.5 – Anatomia dos cabos padrão DeviceNet . ................................................... 26 Figura 5.6 – Vista dos componentes do cabo padrão DeviceNet. .................................. 27 Figura 5.7 – Topologia de uma rede DeviceNet. ............................................................ 28 Figura 6.1 – Armário de CCM composto por três colunas............................................. 29 Figura 6.2 – Vista Externa da Gaveta Utilizada. ............................................................ 30 Figura 6.3 – Vista Interna da Gaveta Utilizada. ............................................................. 30 Figura 6.4 – Comparação Entre Uma Gaveta para CCM e Uma Para CCMI. ............... 31 Figura 6.5 – Estrutura Básica de Controle de um CCMI Utilizando rede DeviceNet .... 32 Figura 7.2 – Símbolo Referente à Bobina no RSLogix 5000. ........................................ 41 Figura 8.1 – Esquema de ligação Física Utilizada.......................................................... 43 Figura 8.2 – CPU 5434 de Um CLP FlexLogix. ............................................................ 45 Figura 8.3 – Relé de Sobrecarga em Estado Sólido E3-Plus. ......................................... 47 Figura 8.4 – Visualização da Rede DeviceNet contendo o scanner 1788-DNBO no RSNetworks for DeviceNet. ........................................................................................... 51 Figura 8.5 – Visualização da Rede DeviceNet contendo o scanner 1788-DNBO e o Relé E3-Plus no RSNetworks for DeviceNet. ........................................................................ 52 Figura 8.6 - Aba Destinada a Configuração dos Parâmetros do Relé E3-Plus. .............. 53 Figura 8.7 – Seleção dos Equipamentos DeviceNet Ativos na Rede. ............................ 56 Figura 8.8 – Visualização das Palavras de Entrada e Saída Destinada ao Relé E3-Plus.56 Figura 8.9 – Palavras de Entrada Provenientes do Relé E3-Plus, exibidas no Controller Tags. ............................................................................................................................... 58 Figura 8.10 – Palavras de Saida Provenientes do Relé E3-Plus, exibidas no Controller Tags. ............................................................................................................................... 59 Figura 8.11 – Palavras Status da Rede DeviceNet. ........................................................ 59 Figura 8.12 – Tags Criadas no Controller Tags.............................................................. 60 Figura 8.13 – Linha Para Acionamento do Motor. ......................................................... 61 Figura 8.14 – Linhas para Leitura do Sinal Proveniente do Relé. .................................. 61 Figura 8.15 – Linhas de Status do Relé. ......................................................................... 62 Figura 8.16 – Linha para Verificação de Erros de Comunicação para o Relé. .............. 62 Figura 8.16 – Exemplo de Funcionamento da Função BTD. ......................................... 63 Figura 8.17 – Linhas de Tratamento do Sinal e Conversão de Valores. ........................ 63 XI LISTA DE TABELAS Tabela 5.1 – Velocidade Máxima de Tráfego em Relação ao Comprimento do Cabo. . 25 Tabela 5.2 - Esquema de cores dos cabos DeviceNet. ................................................... 27 Tabela 7.1 – Comparação Entre Diagramas Booleano, Relé e Ladder. ......................... 39 Tabela 7.2 – Representação de Contatos NA e NF em Situações Diversas. .................. 40 Tabela 8.1 - Montagem da Instância de Objeto 101. ...................................................... 53 Tabela 8.2 - Montagem da Instância de Objeto 103. ...................................................... 54 Tabela 8.3 - Montagem da Instância de Objeto 100. ...................................................... 54 XII LISTA DE ABREVIAÇÕES CA – Corrente Alternada CAN – Controller Area Network CC – Corrente Contínua CCM – Centro de Controle de Motores CCMI – Centro de Controle de Motores Inteligente CI – Circuito Integrado CLP – Controlador Lógico Programável E/S – Entrada e/ou Sáida EPROM – Erasable Programmable Read-Only Memory EEPROM – Electrically-Erasable Programmable Read-Only Memory IHM – Interface Homem-Máquina I/O – Input and/or Output IMCC – Intelligent Motors Control Center LED – Light Emitting Diode MCC – Motors Control Center NA – Normal Aberto NF – Normal Fechado PLC – Programmable Logic Controller PTC – Positive Temperature Coefficient RAM – Random Access Memory ROM – Read-Only Memory UCP – Unidade Central de Processamento 1 I – INTRODUÇÃO 1.1 – Justificativas No atual cenário industrial, o emprego de sistemas automatizados, é imprescindível para as empresas que almejam alcançar destaque industrial, redução no preço de produção e melhor qualidade de produto. Várias foram às evoluções dos sistemas de automação industrial desde seus primórdios, e dentre estas, o Controlador Lógico Programáveis detêm grande importância. Por meio dos CLP, significativas melhorias surgiram no cenário da automação. Por tratar-se de um dispositivo extremamente versátil, robusto, e pode ser adotado nos mais divergentes e exigentes processos encontrados pela indústria atual. A integração das etapas que envolvem os processos produtivos vem sendo cada vez mais buscada nos diversos segmentos industriais. A instalação e manutenção de sistemas de transmissão de dados convencionais implicam em altos custos, principalmente quando se deseja ampliar instalações preexistentes. Para tanto, são requeridas grandes somas para elaboração de projetos e compra de equipamentos. Buscando minimização de custos e aumento da operabilidade das aplicações, introduziu-se o conceito de redes industriais para interligar os vários equipamentos de uma planta de forma eficiente e possibilitar a expansão destas instalações de forma simplificada. 2 Com o emprego destas tecnologias foi possível uma melhoria no sistema de acionamento de motores através dos Centros de Comando de Motores. Com a utilização de relés inteligentes conectados através de redes industriais, é possível obter grande quantidade de informações proveniente dos motores instalados em campo, bem como prover o controle de cada motor. Usando estes conceitos foi desenvolvido um programa para comandar e monitorar uma gaveta de um CCMI. Utilizando-se um relé Allen-Bradley E3-plus conectado através da rede DeviceNet a um CLP Allen-Bradley FlexLogix 5434. 1.2 – Metodologia Inicialmente, foi feito um levantamento bibliográfico a respeito de Controladores Programáveis, Redes Industriais, principalmente sobre a rede DeviceNet, e um estudo sobre CCM. Foi proposta a programação de um relé de estado-sólido E3-Plus instalado numa gaveta de um CCMI, o relé comunica-se pela rede DeviceNet com o CLP. O programa consiste no que seria o acionamento de um motor de corrente alternada, e na coleta de dados oriundos do relé e status da rede DeviceNet. 3 II – INTRODUÇÃO AUTOMAÇÃO Hoje, não é mais concebível exercer uma atividade no âmbito da Engenharia e da Tecnologia, numa empresa industrial de médio ou de grande porte, sem ter o domínio dos conhecimentos básicos de automação dos processos de produção industrial (SHIMIZU, 1998). A automação é um conceito e um conjunto de técnicas por meio das quais se constroem sistemas ativos capazes de atuar com ótima eficiência, usando como base informações recebidas do meio sobre qual atuam. Com base em tais informações, o sistema calcula a ação corretiva mais apropriada para a execução da ação e está é uma característica de sistemas em malha fechada, conhecidos como sistemas de realimentação, ou seja: aquele que mantém uma relação expressa entre o valor de saída em relação ao da entrada de referência do processo. Para que tal situação ocorra como desejada, é necessária a utilização de alguns dispositivos como: sensores, atuadores e CLP. (SILVEIRA, 1998) 1Figura 2.1 – Diagrama de Blocos de um Sistema de Automação. 4 III – MOTORES ELÉTRICOS Um motor elétrico é uma maquina destinada a transformar energia elétrica em energia mecânica. O aparecimento do motor elétrico foi possível a partir de 1800, quando Alessandro Volta construiu a primeira bateria elétrica. Em 1820 o cientista inglês Michael Faraday descobriu o principio do motor elétrico, ao fazer experiências com bobinas energizadas e imãs. Por volta de 1830, o motor elétrico foi aperfeiçoado do ponto de vista prático, tendo o primeiro motor sido construído por Thomas Davenport em 1835. Eram motores muito rudimentares que consumiam rapidamente a bateria. O uso de motores elétricos ficou dependente da possibilidade de se ter energia elétrica de forma permanente. Isso só foi possível com a invenção do dínamo elétrico em 1873, pelo cientista belga Zénobe Gramme. O dínamo transforma a energia mecânica em energia elétrica, que pode ser usada pelo rotor para novamente gerar energia mecânica. A partir de 1880, com a instalação de cabos elétricos em fábricas, escritórios e habitações, a eletricidade estava à mão, e podia ser usada para acionar pequenos motores elétricos. Os motores elétricos são muito usados na indústria e são, sem duvida, os mais usados de todos os tipos de motores, principalmente devido ao fato de: 1. Serem mais baratos, principalmente se comparados a motores de combustão interna, mas também pneumáticos e hidráulicos; 2. Serem faces de transportar devido às suas dimensões relativamente pequenas; 5 3. Serem muito fáceis de comandar, e serem máquinas “limpas”; 4. Serem de construção muito simples; 5. Serem fáceis de manter; 6. Se adaptarem razoavelmente bem às cargas a que são sujeitos; 7. Apresentarem rendimentos elevados, principalmente para cargas médias e elevadas com bons fatores de potencia se a seleção for correta. (PIRES, 2002). Os motores elétricos utilizados são de dois tipos: 1. Motor de corrente continua, 2. Motor de corrente alternada. De acordo com Pires (2002), os motores de corrente continua eram os mais populares até muito pouco tempo, principalmente até ao aparecimento e generalização de variadores de velocidade eletrônicos, que facilitariam o controle de motores de corrente alternada. Isso a par do desenvolvimento construtivo dos motores de indução, permitiu que rapidamente se invertesse a situação, principalmente por que: 1. Os motores CC têm custos mais elevados que os motores CA; 6 2. Os motores CC precisam de um retificador de CA para CC, visto que a energia disponível é alternada; 3. Os motores CC têm custos de instalação e manutenção mais elevados. 3.1 – Motores de Corrente Alternada Os motores são constituídos por uma parte móvel, denominada rotor, que roda no interior de um elemento fixo coaxial, denominado estator. Estão separados pelo entreferro, que não é mais do que a distancia entre o rotor e o estator, ocupada por “ar”. O estator é constituído por um circuito magnético estático, formado por laminas de ferro ou alumínio e isoladas entre si, com uma série de enrolamentos de fio de cobre (bobinas) colocados em cavidades abertas no material ferromagnético. Essas bobinas são alimentadas pela corrente alternada fornecida da rede. O rotor é apoiado num eixo, que por sua vez, transmite à carga (geralmente através de um redutor) a energia mecânica produzida. O entreferro é bastante reduzido, de forma a minimizar a corrente em vazio e, portanto, as perdas, mas também para aumentar o fator de potencia em vazio. 3.1.1 – Motor de Indução Assíncrono Os enrolamentos do rotor não têm alimentação externa, sendo a voltagem induzida no rotor pelo campo rotativo provocado no estator. O rotor roda a velocidades inferiores a 7 do campo girante do estator, havendo, por isso, uma diferença (denominada deslizamento) que justifica a denominação de motor assíncrono. 3.1.2 – Motor Síncrono Neste caso, os enrolamentos do rotor são alimentados por meio de escovas, o que permite um contato permanente e, em conseqüência, os campos girantes no rotor e no estator rodam no mesmo ritmo, de onde resulta que o rotor roda à mesma velocidade do campo girante no estator. Os campos estão sincronizados, o que justifica o nome de motor síncrono. 3.2 – Motores Mais Utilizados na Indústria O motor de indução polifásico assíncrono é o tipo mais utilizado, tanto na indústria como em ambiente doméstico, devido ao fato da maioria dos sistemas atuais de distribuição de energia elétrica serem trifásicos de corrente alternada. Consideram-se dois tipos de motores polifásicos: motor com rotor em gaiola de esquilo, e motor com rotor bobinado. 3.2.1 – Motor com rotor em gaiola de esquilo Por se tratar de um motor mais econômico em relação aos motores monofásicos, seja ao nível de construção ou utilização, capaz de possuir enorme adaptabilidade ao ambientes mais agressivos, é o motor mais utilizado na indústria. Se escolhido adequadamente seu 8 método de arranque, possui um vasto campo de aplicações, o que se traduz numa grande versatilidade. Resume-se em um motor robusto, barato, de rápida produção e ligação à rede. A principal desvantagem refere-se ao fato do reduzido conjugado de partida, em relação à corrente absorvida pelo estator. Trata-se de um motor de velocidade praticamente constante. Sendo o mais utilizado para acionamento de bombas, ventiladores e compressores. 2Figura 3.1 – Constituição de um Motor Elétrico de CA Rotor Gaiola de Esquilo. Fonte: PIRES, 2005 3.2.2 – Motor de rotor bobinado O motor de rotor bobinado consiste em um motor capaz de fornecer elevado conjugado de partida. O motor de rotor bobinado substitui o de rotor em gaiola de esquilo em potencias muito elevadas, devido ao abaixamento da corrente de partida permitida pela configuração do rotor. Apesar de poderem ser utilizados em casos de velocidades constantes de serviço, este motor é empregado para aplicações em que as velocidade de serviço são variáveis. Geralmente, este motor tem sido utilizado para vencer cargas de 9 elevada inércia ou que alternativamente exijam conjugados de partida elevados, ou então, quando o sistema de acionamento requer arranques suaves. 10 IV – O CONTROLADOR LÓGICO PROGRAMÁVEL Durante a década de 1950, o cenário industrial era dominado por dispositivos eletromecânicos para efetuar controles lógicos e de intertravamentos nas máquinas e linhas de produção. Dentre estes dispositivos, os relés foram vastamente utilizados principalmente na indústria automobilística que exigia complexos processos de produção. Apesar de eficientes, problemas práticos bastante relevantes eram constatados. Devido a grande quantidade de elementos, a ocorrência de uma falha causava horas ou mesmo dias de trabalho em busca e correção do elemento defeituoso. Uma vez que a programação dos relés era feita por meio de interconexões elétricas, qualquer alteração a ser realizada no processo gerava longas interrupções no processo produtivo. Na década de 1960, o desenvolvimento de minicomputadores, impulsionado pelo surgimento dos circuitos integrados, permitiu o surgimento do controle on-line de processos industriais. Em 1969, surgiram os primeiros controladores baseados numa especificação da General Motors Corporation. Em geral, alguns conceitos da especificação promovida pela GM, são listados a seguir; Facilidade de programação; Facilidade de manutenção com conceito plug-in; Alta confiabilidade; Dimensões menores que painéis de relés, para redução de custo; Envio de dados para processamento centralizado; 11 Preço competitivo; Sinais de entrada de 115V CA; Sinais de saída de 115V CA; Expansão em módulos; Mínimo de 4000 palavras na memória. 4.1 – Arquitetura básica de um CLP O principio de funcionamento de um CLP pode ser descrito com base em alguns conceitos relativamente simples, mas de grande importância, descritos abaixo: Variáveis de entrada: São sinais externos recebidos pelo CLP oriundos, geralmente, de dispositivos como sensores, chaves ou botoeiras entre outros. Variáveis de saída: São os sinais oriundos do CLP com função geral para acionamento de dispositivos como contatores, displays, relés entre outros. Programa: seqüência especifica de instruções selecionadas de um conjunto de opções oferecidas pelo CLP em uso e, que irão efetuar as ações de controle desejadas, ativando ou não as memoras internas e os pontos de saída do CLP a partir da monitoração do estado das mesmas memórias internas e/ou dos pontos de entrada do CLP. Um CLP é constituído por determinados elementos de hardware como: processador, sistema de memória, fonte de alimentação, dispositivos de entrada e saída e terminal de programação. 12 3Figura 4.1 – Diagrama de Blocos do CLP. Fonte: MORAES, CASTRUCCI, 2001. 4.2 – O Processador O princípio fundamental de funcionamento de um CLP é a execução por parte da Unidade Central de Processamento UCP de um programa, que realiza ciclicamente as ações de leitura das entradas, execução do programa de controle do usuário e atualização das saídas. Para que essas tarefas sejam executadas, um determinado tempo é demandado pela UCP, tal tempo é denominado ciclo de varredura ou scanning, e depende diretamente da do tamanho do programa, da quantidade e do tipo de pontos de E/S e da velocidade e características do processador. 13 4Figura 4.2 – Ciclo de Varredura. Fonte: SILVEIRA, SANTOS. 1998 Independente de sua tecnologia, o processador é responsável pelo gerenciamento total do sistema, controlando os barramentos de endereços, de dados e de controle. Conforme determinado pelo programa de execução, interpreta e executa as instruções do programa de aplicação, controla a comunicação com os dispositivos externos e verifica a integridade de todo o sistema. (GEORGINE, 2000). 4.3 – Sistema de memória De acordo com GEORGINE (2000), o sistema de memória da UCP é constituído pela Memória de do Sistema de Operação e pela Memória de Aplicação. 5Figura 4.3 – Estrutura Básica do Sistema de Memória Fonte: GEORGINE 4.3.1 – Memória do Sistema de Operação 14 Programa de Execução (Firmware): Constitui o programa desenvolvido pelo fabricante do CLP, o qual determina como o sistema deve operar, incluindo a execução do Programa de Aplicação, controle de serviços periféricos, atualização dos módulos de E/S, etc. O Programa de Execução é responsável pela “tradução” do Programa de Aplicação desenvolvido pelo usuário – em linguagem de alto nível, para instruções que o Processador da CPU possa executar – em linguagem de máquina. É armazenado em memória não volátil – tipo ROM, normalmente EPROM. Rascunho do Sistema: Trata-se uma área de memória reservada para o armazenamento temporário de uma quantidade pequena de dados, utilizados pelo Sistema de Operação para cálculos ou controle (calendário e relógio internos, sinalizadores – flags – de alarmes e erros). Uma característica dessa área de memória é o acesso rápido, sendo do tipo RAM. 4.3.2 – Memória de Aplicação ou Memória de Usuário Programa de Aplicação: Nessa área é armazenado o programa desenvolvido pelo usuário para a execução do controle desejado. Trata-se normalmente de memória EEPROM, podendo ser também EPROM, ou ainda RAM com bateria de segurança. Tabela de Dados: Essa área armazena dados que são utilizados pelo Programa de Aplicação, como valores atuais e de preset (pré-configurado) de temporizadores/contadores e variáveis do programa, alem dos status dos Pontos de Entrada e Saída, que são lidas e escritas pelo Programa de Aplicação, respectivamente. A atualização desses status é realizada constantemente, refletindo as mudanças 15 ocorridas nos Pontos de Entrada, e as atualizações das saídas são efetuadas pelo Programa de Aplicação. Cada Ponto de Entrada e Saída, conectado aos Módulos de E/S, tem um endereço especifico na Tabela de Dados, o qual é acessado pelo Programa de Aplicação. Essa memória é do tipo RAM, podendo ser alimentada com bateria de lítio (memória retentiva). 4.4 – Sistema de Entrada e Saída A conexão física entre a UCP e o meio externo é realizada através do Sistema de E/S, através de circuitos de interfaceamento. Alem disso é função do sistema de E/S garantir a proteção à UCP. O circuito de interfaceamento do Sistema de E/S, é constituído por módulos de entrada, módulos de saída e módulos combinados (pontos de entrada e saída no mesmo módulo). Os módulos de entrada são os responsáveis pela aquisição e conversão do sinal oriundo dos dispositivos externos, como: sensores, chaves e transdutores. Os módulos de saída são responsáveis pelo envio do sinal da UCP aos dispositivos externos, como: motores, atuadores e sinalizadores. Tais sinais podem ser provenientes da lógica de controle, pela execução do Programa de Aplicação, ou podem ser “forçados” pelo operador, independente da lógica de controle. Geralmente nos módulos de E/S, pode ser constatada a presença de alguns componentes para segurança como acoplamento ótico dos sinais para a proteção da UCP; e/ou status do módulo como LEDs na parte frontal do módulo, que indicam quais pontos de entrada 16 ou saída estão ativados. Há também a indicação de falhas, como falta de alimentação externa. 4.5 – Fonte de Alimentação Responsável pelos níveis de tensão para alimentação da UCP, dos Módulos e E/S e demais módulos presentes numa configuração, funciona também como um dispositivo de proteção. Garante a segurança e a integridade da tensão de alimentação para todo sistema, por meio de monitoramento constante dos níveis de tensão e de corrente fornecidos. Se esses níveis excederem os valores máximos ou mínimos permitidos, alem do tempo especificado pelo fabricante, a fonte interage diretamente como o processador, gerando uma interrupção (por meio de uma seqüência de comandos) e fazendo com que a UCP pare a execução do Programa de Aplicação. 4.6 – Terminal de Programação Através do Terminal de Programação é estabelecida a comunicação entre o usuário e CLP, ou seja, é um elemento que pode ser de um simples teclado com um mínimo de funções e um display, até um terminal mais sofisticado, com teclados e funções complexas. Pode ser também, um micro PC normal, com software aplicativo que emula um terminal de programação. Um típico Terminal de Programação possui algumas características: Autodiagnóstico; Alteração de dados on-line; Programação de instruções; 17 Monitoração de dados, e Gravação e apagamento de memória. Dependendo do terminal de programação, pode-se editar programas em diagrama lógico, em diagrama de contatos ou no próprio endereço de memória. 18 V – A REDE DEVICENET A rede DeviceNet foi apresentada pela Allen-Bradley em 1994, e no ano de 1995 teve sua tecnologia transferida para a ODVA (Open DeviceNet Vendor Association) organização sem fins lucrativos composta por centenas de empresas ao redor do mundo que mantém, divulga e promove o DeviceNet. A camada física e de acesso da rede DeviceNet é baseada na tecnologia CAN (Controller Area Network) e as camadas superiores no protocolo CIP (Commom Industrial Protocol), que define uma arquitetura baseada em objetos e conexões entre eles. A rede DeviceNet é classificada no nível de rede chamada devicebus, cuja características principais são: alta velocidade, comunicação a nível de byte englobando comunicação com equipamentos discretos e analógicos e alto poder de diagnostico dos devices da rede. A DeviceNet faz parte de uma família de redes implementadas pelo CIP nos camadas superiores. O CIP abrange um grande número de conjuntos de mensagens e serviços para as mais variadas aplicações nos processos de automação, incluindo controle, segurança, sincronização, configuração, diagnóstico e informação. A tecnologia DeviceNet é um padrão aberto de automação com objetivo de transportar 2 tipos principais de informação: dados cíclicos de sensores e atuadores, diretamente relacionados ao controle e, dados acíclicos indiretamente relacionados ao controle, como configuração e diagnóstico. 19 Uma rede DeviceNet pode conter até 64 dispositivos, onde cada dispositivo ocupa um nó na rede, endereçados de 0 a 63. Qualquer um destes pode ser utilizado. Não há qualquer restrição, embora se deva evitar o 63, pois este costuma ser utilizado para fins de comissionamento. Características da rede DeviceNet: Topologia baseada em tronco principal com ramificações. O tronco principal deve ser feito com o cabo DeviceNet grosso, e as ramificações com o cabo DeviceNet fino ou chato. Cabos similares podem ser usados desde que suas características elétricas e mecânicas sejam compatíveis com as especificações dos cabos padrão DeviceNet; Permite o uso de repetidores, bridges, roteadores e gateways; Suporta até 64 nós, incluindo o mestre, endereçados de 0 a 63 (MAC ID); Cabo com 2 pares: um para alimentação de 24V e outro para comunicação; Inserção e remoção à quente, sem perturbar a rede; Suporte para equipamentos alimentados pela rede em 24V ou com fonte própria; Uso de conectores abertos ou selados; Proteção contra inversão de ligações e curto-circuito; Alta capacidade de corrente na rede (até 16 A); Uso de fontes de alimentação de prateleira; Diversas fontes podem ser usadas na mesma rede atendendo às necessidades da aplicação em termos de carga e comprimento dos cabos; Taxa de comunicação selecionável :125, 250 e 500 kbps; Comunicação baseada em conexões de E/S e modelo de pergunta e resposta; Diagnóstico de cada equipamento e da rede; Transporte eficiente de dados de controle discretos e analógicos; 20 Detecção de endereço duplicado na rede; Mecanismo de comunicação extremamente robusto a interferências eletromagnéticas. 6Figura 5.1 – A DeviceNet e a Faixa de Aplicação das Redes de Campo. Fonte: SEIXAS 5.1 – Protocolo DeviceNet DeviceNet é uma das três tecnologias abertas e padronizadas de rede, cuja camada de aplicação usa o CIP. Ao lado de ControlNet e EtherNet/IP, possuem uma estrutura comum de objetos. Ou seja, ele é independente do meio físico e da camada de enlace de dados. Essa camada de aplicação padronizada, aliada a interfaces de hardware e software abertas, constitui uma plataforma de conexão universal entre componentes em um sistema de automação, desde o chão-de-fábrica até o nível da internet. A Figura abaixo mostra um overview do CIP dentro do modelo OSI – Open Systens Interconnection. 21 7Figura 5.2 – DeviceNet Como Parte do Modelo CIP OSI. Fonte: ODVA DeviceNet como outras redes CIP, segue o modelo OSI, que define a estrutura do protocolo de rede em 7 camadas: física, dados, rede, transporte, sessão, apresentação e aplicação. 5.1.1 – Modos de Comunicação A cada scan da rede, o scanner envia 8 bytes de dados para a rede. Cada bit representa um numero de nó da rede DeviceNet. Como a rede DeviceNet possui 64 nós, 8 bytes cobrem todos os nós da rede. Este bit é chamado de bit de sincronismo. Cada dispositivo recebe este bit e devolve ao scanner para informá-lo que está ativo na rede. 22 Junto com este bit se sincronismo, alguns dispositivos enviam também seus dados ou o scanner envia dados para eles. Estas trocas de dados se classificam em: Polled: Quando o scanner envia o bit de sincronismo, envia também os dados de saída e o dispositivo escravo devolve os dados de entrada para o scanner. Strobe: Quando o scanner envia o bit de sincronismo, o dispositivo escravo devolve os dados de entrada para o scanner. Cíclico: O scanner envia o bit de sincronismo e o dispositivo produz um dado, a partir de uma taxa de tempo configurada pelo usuário (entradas/saídas). Este tipo de troca dados é muito eficiente por que: Os dados são transferidos numa taxa adequada aos dispositivo/aplicação; Recursos podem ser preservados para dispositivos com alta variação; Eficiente para aplicações com alterações lentas de E/S (analógico). COS (Mudança de Estado): Os dispositivos produzem dados apenas quando tem seu estado alterado. Em segundo plano é transmitido um bit ciclicamente (heartbeat) para confirmar se o dispositivo está ok. A mudança de estado é eficiente porque reduz drasticamente o tráfego de dados na rede. 23 5.1.2 – Arquivo de Configuração Todo nodo DeviceNet possui um arquivo de configuração associado, chamado EDS – Electronic Data Sheet. Este arquivo contém informações importantes sobre o funcionamento do dispositivo e deve ser registrado no software de configuração de rede. 5.1.3 – A camada de link de dados (Data link layer) DeviceNet utiliza o padrão CAN na camada de link de dados. O mínimo overhead requerido pelo protocolo CAN na camada de dados faz o DeviceNet eficiente no tratamento de mensagens. Frame de dados DeviceNet utiliza somente o tipo de frame de dados do protocolo CAN (dentre outros existentes no protocolo CAN). O protocolo utiliza um mínimo de largura de banda para transmissão das mensagens CIP. O formato do frame de dados DeviceNet é mostrado na figura 1.4 8Figura 5.3 – Formato do Frame de Dados. Fonte: SMAR 24 9Figura 5.4 – Estrutura do Sinal DeviceNet. Fonte: ROCKWELL 5.2 – Camada Física e Meio de Transmissão DeviceNet usa uma topologia de rede do tipo tronco/derivação que permite que tanto a fiação de sinal quanto de alimentação estejam presentes no mesmo cabo. Esta alimentação, fornecida por uma fonte conectada diretamente na rede, e possui as seguintes características: 24Vdc; Saída DC isolada da entrada AC; Capacidade de corrente compatível com os equipamentos instalados; O tamanho total da rede varia de acordo com a taxa de transmissão (125, 250, 500Kbps). As seguintes regras devem ser obedecidas para que o sistema de cabos seja operacional: A distância máxima entre qualquer dispositivo em uma derivação ramificada para a linha tronco não pode ser maior que 6 metros (20 pés); A distância entre dois pontos quaisquer na rede não pode exceder a distância máxima dos cabos permitida para a taxa de comunicação e tipo de cabo utilizado conforme a tabela 5.1, a distância se refere à distância entre dois dispositivos ou resistores de terminação. 25 Velocidade de transmissão 125Kbps 250Kbps 500Kbps Distância Máxima (Cabo Grosso) 500m 250m 100m Distância Máxima (cabo Fino) 100m 100m 100m Comprimento da derivação Máxima Acumulada 6m 6m 6m 156m 78m 39m 1Tabela 5.1 – Velocidade Máxima de Tráfego em Relação ao Comprimento do Cabo. Fonte: ROCKWELL 5.2.1 – Cabos Há 4 tipos de cabos padronizados: o grosso, o médio, o fino e o chato. É mais comum o uso do cabo grosso para o tronco e do cabo fino para as derivações. 26 10Figura 5.5 – Anatomia dos cabos padrão DeviceNet . Fonte: SMAR 27 Os cabos DeviceNet mais usados (fino e grosso) possuem 5 condutores identificados e utilizados de acordo com a tabela seguinte: Cor do Fio Sinal Branco Azul Fio nu Preto Vermelho CAN_H CAN_L Dreno VV+ Cabo Cabo Chato Redondo Sinal DN Sinal DN Sinal DN Sinal DN Blindagem Não Usado Alimentação Alimentação Alimentação Alimentação 2Tabela 5.2 - Esquema de cores dos cabos DeviceNet. Fonte: SMAR 11Figura 5.6 – Vista dos componentes do cabo padrão DeviceNet. Fonte: SMAR Pontos de alimentação (“Power Taps”) podem ser acrescentados em qualquer ponto da rede tornando possível a redundância da alimentação na rede. A corrente no “Trunkline” é 8 amps (com cabo grosso “thick”). No cabo tipo “thin” a corrente máxima é de 3 amps. Uma opção opto-isolado de projeto permite dispositivos energizados externamente (por ex.: partidas de drivers AC e válvulas solenóides) compartilhar o mesmo cabo do bus. Outras redes baseadas em CAN permitem somente uma única fonte de alimentação para a rede inteira. 28 Os dispositivos podem ser alimentados diretamente da rede e comunicam-se com o mesmo cabo. Nós podem ser removidos ou inseridos da rede sem desligar a rede. 5.3 – Topologia da rede As especificações do DeviceNet definem a topologia e os componentes admissíveis. A variedade de topologia possíveis é mostrada na figura à seguir. 12Figura 5.7 – Topologia de uma rede DeviceNet. Fonte: ROCKWELL 29 VI – CENTRO DE CONTROLE DE MOTORES Um CCM é um sistema de manobra e comando de motores elétricos de baixa tensão (até 1000 volts) ou de média tensão (acima de 1000 volts). A norma que regulamenta os CCM é a NBR IEC 60439-1 da ABNT para Conjuntos de Controle e Manobra de Baixa Tensão com Ensaios de Tipo Totalmente Testados. São constituídos de cubículos elétricos, ou gavetas, armários metálicos autosustentados, que podem ser do tipo TTA, totalmente testados e assegurados (Totally Tested Assembly), ou PTTA (Partially Totally Tested Assembly), parcialmente testados. 13Figura 6.1 – Armário de CCM composto por três colunas. Fonte: WEG Cada gaveta é planejada de acordo com o motor que deverá acionar. Para realizar o projeto de uma gaveta, deve-se ter conhecimento prévio de alguns parâmetros do motor a ser acionado, tais como: tensão de operação, quantidade de fases, corrente nominal e corrente máxima, parâmetros a serem monitorados, forma de acionamento, além de 30 determinar se o acionamento será feito através de relés ou soft-starter, ou ainda se o motor terá a velocidade controlada através de inversores de freqüência. 14Figura 6.2 – Vista Externa da Gaveta Utilizada. 15Figura 6.3 – Vista Interna da Gaveta Utilizada. Um CCM pode ser convencional, utilizando apenas relés e contatores acionados através de comandos elétricos digitais, ou então acionado através de redes industriais. 31 Um CCMI é composto de chaves soft-starter, inversores de freqüência, ou relés inteligentes instalados nas gavetas, com interface de rede industrial de diversos padrões como, por exemplo, Ethernet, Profibus, DeviceNet ou Modbus. Os dados do CLP podem ser acessados através de Interfaces Homem-máquina – IHM ou através de microcomputadores instalados em salas de controle ou na própria estrutura do CCM. Tais CCM apresentam maior facilidade de construção e manutenção. Além de enviar relatórios completos sobre seu funcionamento, um CCMI possui uma quantidade significamente menor de cabos de comando, quando comparado com um CCM comum. Na figura 6.3 é feita uma comparação do cabeamento para acionamento de um motor em uma gaveta de um CCM comum, comparado com cabeamento para uma gaveta semelhante num CCMI. 16Figura 6.4 – Comparação Entre Uma Gaveta para CCM e Uma Para CCMI. A figura 6.3 ilustra de forma genérica uma gaveta para CCM e uma gaveta para CCMI. Uma gaveta de CCM Convencional utiliza 4 pares de cabos para cada gaveta, para fazer o acionamento de um motor trifásico instalado no campo e fazer a leitura de corrente em cada uma das fases do motor em campo. Enquanto isso a gaveta para o CCMI utiliza apenas 1 cabo DeviceNet, que pode conectar até 63 dispositivos, ou seja, com um único cabo DeviceNet é possível a ligação de até 63 gavetas de um CCMI. Fazendo uma 32 simples comparação, considere um armário com 63 gavetas convencionais. Se cada gaveta utiliza 4 pares de cabos, seria necessário o total de 252 pares de cabos para ligação desse armário, destacando que também seriam gastos 252 pontos de E/S, ou seja, uma quantidade considerável de módulos de E/S do CLP responsável pelo controle do armário. Enquanto um armário com 63 gavetas inteligentes, gastaria apenas 1 cabo DeviceNet, e 1 Módulo de comunicação DeviceNet no Rack do CLP. Na figura abaixo é exibida a configuração básica de um CCMI utilizando rede DeviceNet, e com o CLP instalado no próprio CCMI. 17Figura 6.5 – Estrutura Básica de Controle de um CCMI Utilizando rede DeviceNet Fonte: WEG Um CCMI não se resume apenas à quantidade de cabos passantes. Com a configuração adequada do relé utilizado, podem-se averiguar muitos outros parâmetros como: 33 corrente média, falta de fase, média de corrente entre as fases, e nos relés mais modernos até mesmo a tensão disponível em cada fase. Dados todos esses fatos apresenta-se abaixo uma comparação entre um CCM e um CCMI. Vantagens da Utilização de CCM Convencional: Confiabilidade para a continuidade do processo; Segurança do operador na operação, supervisão e manutenção; Instalação em locais centralizados para facilidade de operação e manutenção; Versatilidade para comando e proteção de grande número de motores; Elevada compactação, possibilitando o máximo aproveitamento de espaço; Manutenção fácil e rápida, principalmente pela extração de gavetas e sua intercambiabilidade; Modularidade do sistema, permitindo fácil ampliação; Remanejamento das gavetas facilitando expansões ou alterações; Elevada segurança, pois permite a execução de manutenção e outros serviços em determinado equipamento sem desenergizar os demais. Vantagens na Utilização de CCMI Além das vantagens descritas anteriormente, salienta-se: Maior confiabilidade no sistema de proteção; Eliminação de vários componentes da gaveta como, por exemplo, contadores de hora e de manobra, relés térmico de sobrecarga convencional, transformadores de corrente, etc.; Redução da fiação de comando; 34 Redução na cablagem de monitoração, supervisão e controle, pois utiliza par trançado; Monitoração, supervisão e controle remotamente via IHM, CLP ou PC; Montagem do Relé Inteligente em trilho DIN ou placa de montagem; Rearme do relé a distância reduzindo tempo de manutenção; Rapidez e precisão na identificação de defeitos; Automação dos registros e estatísticas de defeito por gaveta; Rede ProfiBus-DP normalizado mundialmente (não é rede proprietária) ou DeviceNet; Comunicação com outros CLP’s em rede de protocolo aberto. Fica evidente que os CCMI são mais eficazes que CCM convencionais, seja na quantidade de informações possíveis de ser adquiridas do processo, seja na economia de construção e manutenção do sistema. 35 VII – LINGUAGENS DE PROGRAMAÇÃO Com a substituição dos painéis de controle á relés, pelos CLP, houve a necessidade de criar uma linguagem de programação que fosse familiar à experiência dos técnicos e engenheiros, já acostumados com a lógica de relés. Surgiu dessa necessidade então a linguagem Ladder, trata-sede uma linguagem gráfica baseada em símbolos semelhantes aos encontrados nos esquemas elétricos. Porém com as sofisticações ocorridas nos CLP, a representação simbólica dos programas tornou-se, em alguns casos, impossível de ser implementada por meio de diagrama a relés. O que acarretou a elaboração de várias outras linguagens alternativas. Para evitar dúvidas e ambigüidades nas implementações, a IEC elaborou uma série de especificações para os CLP. Estas especificações têm o objetivo de promover a unificação internacional dos equipamentos e linguagens para o uso em CLP. A partir desta série de especificações foi criada a norma IEC-61131, que é dividida nas seguintes partes: Parte 1: Informações Gerais; Parte 2: Especificações dos Equipamentos e Testes; Parte 3: Linguagens de Programação; Parte 4: Orientações ao Usuário; Parte 5: Comunicação; Parte 6: Comunicação por Fieldbus; Parte 7: Programação para Controle Fuzzy; Parte 8: Orientações para Aplicação e Implementação das Linguagens de Programação. 36 A parte três (IEC-61131-3), que aborda as Linguagens de Programação, define também a Estrutura de um Projeto, os Tipos de Dados e a Organização Interna do Programa. A norma IEC-61131-3 determina cinco diferentes linguagens de programação. Todas as línguas são definidas como opcionais, mas pelo menos um deve ser apoiada, a fim de reivindicar o cumprimento das especificações. As linguagens determinadas pela IEC61131-3 seguem abaixo: IL (instruction list ou lista de instruções): Linguagem de baixo nível, semelhante à assembler, textual e apresenta alta eficiência em pequenas aplicações. ST (structured text ou texto estruturado): Linguagem de alto nível, semelhante ao Pascal, textual e que incorpora vários conceitos intuitivos. É eficiente em implementações complexas, onde é difícil expressar com linguagem gráfica, como linguagem de algoritmos de otimização e inteligência artificial. LD (Ladder diagram ou diagrama Ladder): Linguagem gráfica baseada em símbolos e esquemas elétricos como relês, bobinas e contatos. Está linguagem será abordada com mais detalhes posteriormente. FBD (Function block diagram ou diagrama de blocos de função): Linguagem gráfica que permite procedimentos combinacionais complexos através dos blocos-padrão como AND, OR, NOT, entre outros. 37 SFC (sequential function chart ou diagrama funcional seqüencial): Divide o processo em um numero definido de passos separados por transição. Também é conhecida como Grafcet. 7.1 – Ladder A linguagem Ladder será utilizada para programação do relé E-Plus, como proposto no objetivo deste trabalho, por este motivo será abordada um pouco mais afundo neste capítulo. Foi a primeira linguagem a ser criada, e atualmente é a mais utilizada para programação de CLP. Essa linguagem é uma adaptação de um diagrama elétrico funcional que utiliza um sistema gráfico de símbolos e termos. Ela permite programar desde funções binárias básicas até funções digitais complexas, que fornecem as decisões que serão tomadas pelo CLP em relação ao atuador ligado a ele. 7.1.1 – Estrutura da Linguagem Ladder Conforme dito anteriormente a estrutura do Ladder possui uma estrutura semelhante aos símbolos e regras tradicionais no projeto de quadros de comando. O diagrama elétrico é constituído por duas linhas verticais, comumente chamadas de barras de alimentação. Cada representação de casualidade é feita por uma linha horizontal. Esta linha por sua vez, é geralmente formada por, pelo menos, um elemento 38 controlado (bobina de relé) e um conjunto de condições para o controle desse elemento (rede de contatos). Figura 7.1 – Estrutura Básica de Uma Linha Ladder no RSLogix 5000 O diagrama Ladder é apenas uma representação lógica, trabalhando somente com símbolos, não considerando a tensão envolvida nas barras de alimentação e nem a intensidade da corrente pelo circuito. Os contatos e outros dispositivos, no diagrama estão em cada momento abertos ou fechados e as bobinas, por conseqüência, ficam desenergizadas ou energizadas. O CLP examina a continuidade da linha, verifica se todas as instruções de entrada são verdadeiras. Trata-se de uma “continuidade lógica”. Cada linha Ladder permite programar desde simples funções binárias até funções digitais complexas. Na tabela abaixo faz-se uma comparação entre as principais instruções e comandos utilizados nesta linguagem. Comparação entre Diagramas Ladder, Relé e Booleano. 39 3Tabela 7.1 – Comparação Entre Diagramas Booleano, Relé e Ladder. Booleano Relé Função “E” (AND) Função “OU” (OR) Função “NÃO” (NOT) Ladder 40 7.1.1.1 – Componentes Básicos da Linguagem Ladder Os componentes básicos representam praticamente os elementos comuns encontrados nos quadros de comando e relés. Tais elementos são: contato normal aberto, contato normal fechado e bobina. Contato Normal Aberto e Normal Fechado Quando uma entrada do processo está no estado lógico “1”, e no diagrama ladder existe programado um contato NA, com o mesmo endereço dessa entrada, este contato é energizado e em sua monitoração o contato fica tarjado. Quando uma entrada do CLP recebe do processo um estado lógico “0” e no diagrama ladder existe programado um contato NF com o mesmo endereço dessa entrada, este contato é energizado e em sua monitoração o contato fica tarjado. Para que o CLP receba estado lógico “0”, o contato físico existente no campo ou no CCM deve ser aberto. A tabela abaixo representa de forma resumida o conceito apresentado acima. 4Tabela 7.2 – Representação de Contatos NA e NF em Situações Diversas. Entrada do CLP 1 0 1 0 Contato Programado NA NF Contato CLP Monitoração Energiza Desenergiza Desenergiza Energiza Tarjado Não Tarjado Tarjado Não Tarjado Gráfico 41 Bobina O estado lógico da bobina depende da continuidade lógica da sua linha. Se houver continuidade, o estado lógico da bobina será “1” (bobina energizada), caso contrário será “0” (bobina desenergizada). 18Figura 7.2 – Símbolo Referente à Bobina no RSLogix 5000. 7.1.1.2 – Instruções Avançadas Para operações mais complexas, onde a lógica de relés não é suficiente, foram desenvolvidos comandos avançados em linguagem Ladder, que possibilitam a manipulação de dados em bytes e palavras, e não somente com valores 0 e 1.Para a implementação, essas instruções são representadas como blocos funcionais. Instruções de controle interno são instruções que acompanham os intervalos de tempo ou evento, contados de acordo com a continuidade lógica da linha, ajudando no controle do equipamento, podendo ser um temporizador ou contador. A programação dessas instruções é feita através do terminal de programação, que deve possuir uma função especifica. Cabe ao programador definir corretamente o endereçamento e procurar manter uma seqüência de instruções na memória do controlador programável. As instruções são definidas como: De manipulação de dados, que energizam ou desenergizam um equipamento a partir da transferência ou comparação de dados armazenados na memória de usuário; 42 Mover, que transfere dados entre endereços de memória, possibilitando ao programa executar diferentes funções com o mesmo dado; Comparar, que faz a comparação de dados entre endereços, permitindo ao programa executar diferentes funções, baseadas em um dado de referência; Matemáticas, que realizam cálculos de dados armazenados na memória de dados. Elas podem ser: Soma, subtração, multiplicação e divisão. Efetuando operações correspondentes com os dados se as condições forem verdadeiras; Lógicas, que realizam operações lógicas com os dados armazenados na memória de dados e podem ser usadas para a comparação de bits e diagnostico de dados, podendo ser do tipo AND, OR ou Exclusive OR. 43 VIII – MONTAGEM A montagem procedeu-se utilizando um CLP da família Allen-Bradley FlexLogix, mas especificamente uma UCP 5434. A comunicação entre o Terminal de Programação, no caso um computador pessoal, foi realizada através de interface serial RS-232. Através de um módulo de comunicação Allen-Bradley DaugtherCard DeviceNet 1788DNBO instalado no CLP, foi feita a conexão física, com o uso de cabo DeviceNet fino, até o relé E3-Plus, respeitando todas as regras para conexão. Foi utilizada uma fonte Phoenix Contact de 24Vcc e corrente máxima de 5A para alimentação do CLP e da rede DeviceNet. No interior da gaveta estão instalados o relé Allen-Bradley E3-Plus, um disjuntor de caixa moldada WEG DWM160L e um contator WEG CWM32. O esquema de ligação física entre o terminal de programação, o CLP e a gaveta é mostrado na figura abaixo. 19Figura 8.1 – Esquema de ligação Física Utilizada. 44 Após a checagem de toda montagem física, chega o momento de fazer a configuração do Relé E3-Plus e a programação em Ladder. 8.1 – Principais Elementos Empregados na Montagem 8.1.1 – CLP Allen-Bradley FlexLogix 5434 O sistema FlexLogix oferece um CLP para vários propósitos. Trate-se de um CLP distribuído, ou seja, é possível a distribuição e pontos de E/S para perto dos sensores ou atuadores instalados. O FlexLogix controla e monitora sistemas de E/S através de um backplane 1794. O Controlador FlexLogix pode comunicar-se com computadores ou outros processadores através da RS-232, DeviceNet, ControlNet e EtherNet/IP. Um controlador FlexLogix suporta o conjunto de instruções Logix, modelo de tarefas e modelo e dados. Um controlador FlexLogix e outros controladores Logix tem aproximadamente a mesma forma de programação e configuração de E/S, utilizando o software RSLogix 5000. O sistema operacional multitarefa suporta oito tarefas configuráveis que podem ser priorizadas. Uma tarefa deve ser contínua e as outras periódicas. Cada tarefa pode ter no máximo 32 programas, cada um com seus próprios locais e lógicas, permitindo maquinas virtuais operar independentemente dentro do mesmo controlador. 45 20Figura 8.2 – CPU 5434 de Um CLP FlexLogix. Fonte: Allen-Bradley 8.1.2 – Relé de Sobrecarga em Estado Sólido E3-Plus O Relé de Sobrecarga E3-Plus é um relé de sobrecarga eletrônico baseado em microprocessador de estado sólido de múltipla função para proteção dos motores de indução tipo gaiola com classificação nominal de 0,4 a 5.000 A. O Relé E3-Plus possui quatro entradas e duas saídas digitais de 24VCC O Relé E3-Plus, vem configurado de fábrica para operar em sistemas trifásicos, mas pode ser facilmente modificado para trabalhar em sistemas monofásicos. O Relé de Sobrecarga E3-Plus fornece as seguintes funções de proteção e de advertência: Sobrecarga; Desbalanceamento de fase (somente desarme); Travamento (somente desarme); 46 Emperramento; Subcarga; Desequilíbrio de Corrente; Fuga à terra; Entrada do termistor (PTC). E permite ao usuário monitorar os seguintes dados operacionais na rede DeviceNet: Correntes de fase individual (em ampère); Correntes de fase individual (como um percentual da corrente de carga plena do motor); Valor médio da corrente (em ampère); Valor médio da corrente (como um percentual da corrente de carga plena do motor); Percentual da capacidade térmica usada; Percentual de desequilíbrio de corrente; Corrente de fuga à terra (em ampère). Todos esses parâmetros listados acima podem ser configurados através de parâmetros específicos do relé, usando o software RSNetWoks. 47 21Figura 8.3 – Relé de Sobrecarga em Estado Sólido E3-Plus. Fonte: Allen-Bradley 8.2 – Configuração e Programação. Antes de começar a configuração da rede DeviceNet, do relé E3-Plus e a programação para acionamento do mesmo, faz-se uma pequena abordagem sobre os softwares utilizados nestas etapas. 8.2.1 – RSLogix 5000 O software Rockwell RSLogix 5000, é o responsável por toda a programação, configuração e manutenção dos programas que são executados nos controladores das famílias Controllogix, Compactlogix, FlexLogix entre outros. 48 Com o RSLogix 5000 foi é possível criar tags para os endereços de memória dedicados aos equipamentos listados nos programas, acelerando a localização de bits de memória durante a criação ou alteração de um programa. Surgimento do “USER DEFINE”, que consiste em um sistema de padronização de mnemônicos exclusivos para cada tipo de equipamento, seqüência, alarmes, e outras situações. A programação é feita de acordo com a necessidade e propriedades do processo a ser controlado. O RSLogix aceita diversas linguagens de programação, tais como Ladder, texto estruturado, blocos de função e function chart. Nas aplicações para a mina de Alegria, toda a programação foi feita em Ladder. O software permite de forma fácil a inclusão ou remoção de novos programas, sem que haja paradas na linha de produção, tornando assim o as alterações necessárias aos programas mais dinâmicas. Poucas são as situações onde a parada total da CPU é necessária, para que se possa fazer algum tipo de alteração. Um exemplo de modificação que exige a parada da CPU é a inclusão e configuração de um novo módulo. 8.2.2 – RSLinx O software RSLinx foi desenvolvido para prover a comunicação entre todos os dispositivos e softwares Allen-Bradley. É através dele que é feita a configuração e conexão entre o CLP que está no campo ao software responsável pela sua programação e manutenção (RSLogix 5000, RSLogix 5, etc). É através do RSlinx que é realizada 49 também a comunicação como o sistema supervisório, PainelView, sistema PIMS e outros. Qualquer equipamento ligado a rede deve ser reconhecido pelo RSLinx, caso contrário o mesmo não será detectado pelo software responsável pelo equipamento. É no RSLinx também que são configurados os caminhos de comunicação entre o terminal de programação e o CLP, seja comunicação realizada em uma rede Ethernet, ou simplesmente por um cabo serial. 8.2.3 – RSNetworks for DeviceNet O software RSNetworks for DeviceNet é responsável pela configuração de todas as redes DeviceNet instaladas. Qualquer que seja a configuração de rede, tipo de troca de dados, equipamentos, velocidade de transmissão, enfim todos os parâmetros necessários para que uma rede DeviceNet funcione corretamente devem ser configurados no RSNetWorks for DeviceNet. Uma rede DeviceNet pode ser configurada colocando elemento a elemento na aba Graph, ou então localizada automaticamente contendo todos os equipamentos conectados a rede com seus respectivos nós. Para que um equipamento DeviceNet seja reconhecido no RSLogix 5000, o mesmo deve estar corretamente configurado no RSNetWorks for DeviceNet. Entre todos os parâmetros configurados, deve ser dada atenção especial à palavra ou palavras utilizadas pelo equipamento para transmitir e receber dados. Cada equipamento exige uma 50 quantidade diferente de palavras para sua configuração e comunicação, logicamente equipamentos mais complexos como um inversor de freqüência exigem mais palavras do que um simples relé. 8.3 – Configuração da Rede DeviceNet e do Relé E3-Plus O primeiro passo para a configuração de uma rede DeviceNet é a inserção dos dispositivos desejados, neste caso um scanner e um relé, no barramento de rede do software RSNetWorks for DeviceNet. Adicionando o scanner 1788-DNBO Ao lado esquerdo da janela, observa-se a relação de dispositivos DeviceNet disponíveis. Ao escolher o dispositivo desejado e sua correta revisão de firmware, o módulo escolhido então será adicionado á janela Grahp, com seu número de nó correspondente. 51 22Figura 8.4 – Visualização da Rede DeviceNet contendo o scanner 1788-DNBO no RSNetworks for DeviceNet. Adicionando o Relé E3-Plus O relé de sobrecarga de estado sólido E3-Plus, está localizado na pasta Motor Overload. Após selecionar o modulo adequado, juntamente com sua revisão de firmware, o módulo correspondente ao relé então será adicionado á janela Grahp, com seu número de nó correspondente. A configuração até o momento é deverá ser igual a representada na figura baixo. 52 23Figura 8.5 – Visualização da Rede DeviceNet contendo o scanner 1788-DNBO e o Relé E3-Plus no RSNetworks for DeviceNet. Com a configuração da rede feita agora, deve ser feita a configuração dos dispositivos individualmente. 8.3.1 – Configuração do Relé E3-Plus Em propriedades do dispositivo, cada aba exibe etapas da configuração e monitoramento do dispositivo. A aba General configura as seguintes informações do dispositivo: nome, descrição e endereço de rede. Nesta contem as seguintes informações: fabricante, tipo, código de catálogo e revisão do produto. Na aba Parameters, são apresentados todos os parâmetros deste dispositivo. Alguns destes parâmetros podem ser alterados de acordo com as configurações da aplicação. 53 24Figura 8.6 - Aba Destinada a Configuração dos Parâmetros do Relé E3-Plus. A aba Parameters do relé E3-plus conta com 84 parâmetros, destes foram configurados os parâmetros 59(Output Assembly) e 60(Input Assembly), e posteriormente os parâmetros 61, 62, 63, 64. Tais parâmetros determinam quais serão palavras de configuração dos dispositivos de entrada e saída, e palavras de monitoramento do relé. Cada valor indicará para o relé E3-Plus um conjunto de funções diferentes. No parâmetro 59, é definido o valor do parâmetro para os comandos de saída, alguns valores de parâmetros com suas respectivas palavras são fornecidos abaixo. 5Tabela 8.1 - Montagem da Instância de Objeto 101. Byte 0 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 OutA 54 6Tabela 8.2 - Montagem da Instância de Objeto 103. Byte Bit 7 0 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Reset de Falha Bit 1 Bit 0 OutA No parâmetro 60, é definido o valor do parâmetro para os comandos de entrada, alguns valores de parâmetros com suas respectivas palavras são fornecidos abaixo. 7Tabela 8.3 - Montagem da Instância de Objeto 100. Byte 0 1 2 3 4 5 6 7 Palavra 0 1 2 3 Valor Valor do parâmetro apontado para o parâmetro #61 (Low Byte) Valor do parâmetro apontado para o parâmetro #61 (High Byte) Valor do parâmetro apontado para o parâmetro #62 (Low Byte) Valor do parâmetro apontado para o parâmetro #62 (High Byte) Valor do parâmetro apontado para o parâmetro #63 (Low Byte) Valor do parâmetro apontado para o parâmetro #63 (High Byte) Valor do parâmetro apontado para o parâmetro #64 (Low Byte) Valor do parâmetro apontado para o parâmetro #64 (High Byte) Os parâmetros 59 e 60 foram configurados com os valores 103 e 100 respectivamente. Consultando a tabela para o valor de parâmetro 100, os parâmetros 61, 62, 63 e 64 receberão os valores de outros parâmetros listados na aba Parameters. Neste caso os parâmetros 61, 62, 63 e 64 foram configurados com os seguintes valores: Parâmetro 61= 21, Device Status, dentro deste registro estão os bits de estado do relé: saída acionada, entrada digital 01 e 02, alarme e corrente no motor. Parâmetro 62= 14, Trip Status, dentro deste registro estão os bits de falha de relé: teste de Trip, sobrecarga, perda de fase, motor travado, motor parado, subcarga, corrente desbalanceada, falha de comunicação, falha de hardware e etc. 55 Parâmetro 63= 04 Average Current, dentro deste registro será lido o valor médio de corrente no motor. Parâmetro 64= 15 Warning Status, dentro deste registro estão os bits de alarme do relé: sobrecarga, motor travado, subcarga, corrente desbalanceada, falha de comunicação e etc. Para este trabalho foram escolhidos os parâmetros listados acima, mas vale ressaltar que o relé E3-Plus, possui vários outros parâmetros que podem ser configurados de acordo com as especificações da aplicação desejada. 8.3.2 – Configurando o Scanner 1788-DNBO Na aba Scanlist, encontra-se duas caixas: Avaliable Devices e Scanlist. Na caixa Avaliable Devices aparecerá todos os módulos disponíveis a serem configurados neste scanner. Os módulos que estarão ativos na rede devem estar listados na janela Scanlist, neste caso apenas o relé E3-Plus. Isto significa que este módulo scanner irá varrer estes módulos. 56 25Figura 8.7 – Seleção dos Equipamentos DeviceNet Ativos na Rede. Nas abas Input e Output, são exibidas as posições de memória alocadas para cada dispositivo. Estes são os endereços de acesso de cada dispositivo. 26Figura 8.8 – Visualização das Palavras de Entrada e Saída Destinada ao Relé E3-Plus. De acordo com a figura anterior, os endereços das entradas do E3-Plus estão configurados para as palavras 1:I.Data[0] e 1:I.Data[1]. E os endereços de saída configurados para os bits 0 a 7 da palavra 1:O.Data.[0]. 57 Estes endereços representam os parâmetros configurados no relé E3-Plus nos parâmetros 61, 62, 63 e 64, conforme configurado anteriormente. Estes valores são referentes aos parâmetros 21, 14, 04 e 15. 1:I.Data[0] 31...............................16. 15...............................0 Parâmetro 62 1:I.Data[1] Parâmetro 61 31...............................16. 15...............................0 Parâmetro 64 Parâmetro 62 Os endereços das saídas do relé E3-Plus é 1:O.Data[0]. Este endereço representa os bits de comando do relé E3-Plus. 1:O.Data[0] 31...............................16. 15..........7.6.5.4.3.2.1.0 Comando E3-Plus A configuração da rede DeviceNet está pronta, basta agora fazer a programação no RSLogix 5000. 8.4 – Programação no RSLogix 5000 Nesta etapa é feita a configuração dos modulo de comunicação 1788-DNBO, bem como uma programação simples. O programa de Aplicação, desenvolvido em Ladder, consiste em uma aplicação para acionar o relé E3-Plus. Inicialmente foi inserido o módulo de comunicação DeviceNet 1788-DNBO, e feita sua configuração 58 Após a configuração do módulo DeviceNet no FlexLogix,todas as tags necessárias para o monitoramento, configuração e acionamento dos dispositivos instalados na rede DeviceNet foram criadas automaticamente no Controller Tags do RSlogix 5000. No endereço Local:1:I, são listado os bits de registro do status do scanner e os dados das entradas, como pode ser visto na próxima figura. 27Figura 8.9 – Palavras de Entrada Provenientes do Relé E3-Plus, exibidas no Controller Tags. No endereço Local:1:O, são listado os bits de comando do scanner e os dados das saídas, como pode ser visto na próxima figura. 59 28Figura 8.10 – Palavras de Saida Provenientes do Relé E3-Plus, exibidas no Controller Tags. No endereço Local:1:S, são listados os bits de status da rede DeviceNet, como pode ser visto na próxima figura. 29Figura 8.11 – Palavras Status da Rede DeviceNet. A partir de agora será feita a programação em Ladder, destinada a recolher informações do relé E3-Plus e fazer o acionamento do mesmo, sendo um programa voltado apenas 60 para a demonstração do funcionamento do relé, não foram incluídas lógicas de segurança ou intertravamento. Foi criada uma tarefa periódica denominada CCM e dentro desta tarefa foi criado o programa GAVETAS. No programa GAVETAS, foi criada a rotina GAVETA_1, é nesta rotina onde foi feita toda a programação da gaveta. Nesta rotina foram implementadas algumas funções básicas, como ler pontos de entrada disponíveis no relé E3-Plus, acionar uma das saídas e monitorar alguns status do relé e das fases e por fim efetuar a leitura da corrente média instantânea das fases. As tags utilizadas no programa foram criadas previamente através do Controller Tags, função do programa responsável pela criação das tags utilizadas, bem como edição e monitoramento das mesmas. 30Figura 8.12 – Tags Criadas no Controller Tags. Apesar de todas as linhas de comando estarem na mesma rotina, foi feita uma divisão meramente visual para facilitar a localização das linhas responsáveis pelas entradas, 61 saídas, status e tratamento do sinal referente à corrente do motor. A primeira parte da rotina é responsável por comandar uma das saídas do relé, neste caso a saída responsável por fazer o acionamento do contator que acionará o motor. 31Figura 8.13 – Linha Para Acionamento do Motor. A segunda parte da rotina é responsável pela leitura dos sinais de entrada do relé, neste caso os quatro pontos de entrada do relé foram configurados, tais pontos podem ser usados, por exemplo, em botoeiras locais para ligar e desligar o motor. 32Figura 8.14 – Linhas para Leitura do Sinal Proveniente do Relé. A terceira parte é referente a leitura dos status do relé e do motor, como parâmetros do relé é monitorada apenas falha de comunicação, já para o relé é feita a monitoração de falta de fase, sobrecarga, subcarga e falta de terra. 62 33Figura 8.15 – Linhas de Status do Relé. A quarta parte é referente à verificação de falhas de comunicação no relé que está localizado na rede DeviceNet. 34Figura 8.16 – Linha para Verificação de Erros de Comunicação para o Relé. A quinta e ultima parte é referente à leitura do valor médio de corrente instantâneo no motor, bem como o tratamento do valor de corrente. O tratamento de sinal é necessário devido ao relé enviar o valor de corrente através de uma palavra de 16bits, onde apenas 8bits são referentes ao sinal. Para que o sinal seja devidamente separado, e posteriormente ser convertido em valores de corrente adequado ao motor que está acoplado ao relé. Para efetuar este tratamento é utilizada a função avançada BTD (bit field distribute), que consiste em copiar uma seqüência de bits de uma palavra e colar esta seqüência em uma outra palavra. A figura 8.16 mostra um exemplo da utilização desta função, e a figura 8.17 mostra as linhas responsáveis pelo tratamento do sinal. Nesta mesma etapa da rotina, é empregada outra função avançada, denominada CPT (Compute), esta função realiza operações matemáticas e armazena o resultado numa posição de memória. Neste trabalho a função foi utilizada para converter o valor de 63 corrente proveniente do relé, que chega ao RSLogix na faixa de 0 100, para um valor adequado da faixa de corrente em que o relé opera. Neste caso o valor foi convertido de uma faixa de 0 a 100 para uma faixa de 9 a 45 A. A figura abaixo mostra a linha que contém a instrução responsável por esta conversão. 35Figura 8.16 – Exemplo de Funcionamento da Função BTD. 36Figura 8.17 – Linhas de Tratamento do Sinal e Conversão de Valores. 64 IX – CONCLUSÕES E SUGESTÃO PARA TRABALHOS FUTUROS Este trabalho consiste em apontar diferenças físicas entre um CCM e um CCMI, esclarecendo as necessidades da evolução na arquitetura dos CCM, bem como um estudo sobre o histórico, funcionamento e arquitetura dos Controladores Lógico Programáveis. Conceitos sobre redes industriais, com ênfase na rede DeviceNet, foram abordados durante todo o trabalho, demonstrando as vantagens que estas redes proporcionam no âmbito da automação moderna. Foi feita a configuração do relé de estado sólido E3-Plus, juntamente com a elaboração de um programa simples para acionamento e leitura de dados do relé, a comunicação do relé com o CLP foi feita com êxito, apesar de não ter sido possível realizar a interação do relé com qualquer dispositivo visual. A sugestão para trabalhos futuros é fazer a ligação física de um motor a uma gaveta dotada de um relé inteligente, como por exemplo, o E3-Plus, acionado cargas com o motor e fazendo verificações de corrente e status. Outra sugestão é interligação de dispositivos de E/S DeviceNet, utilizando CLP modular. 65 REFERÊNCIAS BIBLIOGRAFICAS ABB. Overview of the IEC 61131 Standard. Bartlesville. 4p. GEORGINI, M. Automação Aplicada: Descrição e implementação de sistemas seqüências com CLP´s. 6ª Ed. São Paulo: Érica, 2000. IEC. 61131-1: Programmable controllers – Part 1: General information. Genebra. 2003. 24p. IEC. 61131-3: Programmable controllers – Part 3: Programming languagesGeneral information. Genebra. 2003. 226p. MATA, L. C.; Curso de Manutenção e Programação de Controladores Programáveis CLP5. Ouro Preto: 2008. MORAES, C.C.; CASTRUCCI, P.L.; Engenharia de Automação Industrial. Rio de Janeiro: LTC, 2001. NATALE, F.; Automação Industrial. 9ª Ed. São Paulo: Érica, 2007. ODVA. DeviceNet – CIP on CAN Technology. Michigan. 2008. 8p. PIMENTA, K. B. 2008, Controlador Lógico Programável. 2008. Notas de Aula. PIRES, J. N.; Automação Industrial. Lisboa: ETEP, 2002. ROCKWELL AUTOMATION. Rede DeviceNet Configuração e Manutenção. 2005 ROCKWELL AUTOMATION. Logix5000 Controllers IEC 61131-3 Compliance. Milwaukee. 2008. 20p. ROCKWELL AUTOMATION. Manual do E3 and E3-Plus Solid-State Relay. Milwaukee. 2008. 228p. ROCKWELL AUTOMATION. Manual do FlexLogix Controller System. Milwaukee. 2007. 130p. SCHMIDT. A. M.; Controle de Nível Utilizando Controlador Lógico Programável. 2008. Monografia (Engenharia de Controle e Automação). Universidade Federal de Ouro Preto – UFOP. 2008. Seixas, C. F. DeviceNet. Departamento de Engenharia Eletrônica – UFMG. 2007 Seixas, C. F. Arquitetura de Sistemas de Automação – Uma Introdução. Departamento de Engenharia Eletrônica – UFMG. 2007 66 SILVEIRA, P.R.; SANTOS, W. Automação e controle discreto. 7ª Ed. São Paulo: Érica, 1999. SMAR. Tutorial DeviceNet. Disponível em: <http://www.smar.com/brasil2/devicenet.asp>. Acesso em: 03/12/2009. WEG. Automação – Centros de Controles de Motores de Baixa Tensão. Jaraguá do Sul. 16p.
Baixar