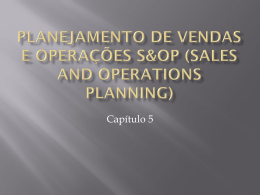
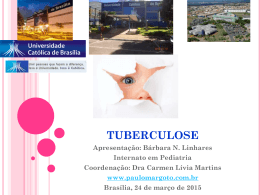
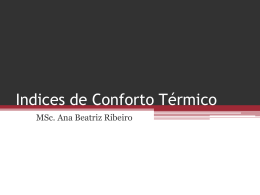
PPD: Balanceamento de Carga e Scheduling2 Fernando Silva DCC-FCUP 2 (Alguns dos slides são baseados nos de Kathy Yelick, www.cs.berkeley.edu/ yelick) Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling3 1 / 21 Objectivo do Scheduling Os conceitos de balanceamento de carga e de scheduling são muito próximos e, normalmente, usam-se com o mesmo significado. O objectivo de uma estratégia de scheduling é maximizar o desempenho de sistema paralelo, transferindo tarefas de processadores mais sobrecarregados para outros que estejam mais leves. Uma estratégia de scheduling envolve duas decisões importantes: determinar quais as tarefas que podem ser executadas em paralelo, e determinar onde executar as tarefas paralelas A tomada de decisão é normalmente feita com base ou em conhecimento prévio ou em informação em tempo de execução. Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling4 2 / 21 Dificuldades para o Scheduling O desenho de uma estratégia de scheduling depende das propriedades das tarefas: Custos das tarefas I I têm todas as tarefas o mesmo custo? se não têm, quando são esses custos conhecidos? F antes da execução, quando a tarefa é criada, ou apenas quando termina? Dependências entre tarefas I I as tarefas podem ser executadas em qualquer ordem? se não podem, quando são conhecidas as dependências? F antes da execução, quando a tarefa é criada, ou apenas quando termina? Localidade I I é importante que algumas tarefas executem no mesmo processador (ou próximo deste) para reduzir custos de comunicação? quando é que se conhece a informação sobre comunicação? Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling5 3 / 21 Custo de Tarefas Scheduling de um conjunto de tarefas nos casos seguintes: Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling6 4 / 21 Dependências entre tarefas Scheduling de um grafo tarefas nos casos seguintes: Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling7 5 / 21 Localidade de tarefas Scheduling de um conjunto de tarefas nos casos seguintes: Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling8 6 / 21 Soluções de Scheduling Scheduling Estático - as decisões são tomadas em tempo de compilação. I I I análise estática de programas para estimar tamanho das tarefas; esta informação é difícil de obter e geralmente incompleta. mapeamento estático da árvore de pesquisa na arquitectura paralela (mapeamento óptimo é NP-completo). construção de um grafo dirigido com os nós a representarem tarefas e as ligações representarem dependências nos dados ou comunicação; determinar ordem de execução que minimize o tempo de execução. Scheduling Dinâmico (ou partilha adaptativa de trabalho) - faz uso de informação do estado da computação em tempo de execução, para tomar decisões. I Exemplo: verifica a carga dos processadores para assegurar um balanceamento de carga dinâmico nos processadores. Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling9 7 / 21 Porquê Scheduling Dinâmico? Para uma grande classe de problemas, o seu espaço de soluções corresponde a uma árvore de procura. Estes problemas são frequentemente: computacionalmente exigentes admitem muitas estratégias diferentes de paralelização requerem balanceamento dinâmico de carga Exemplos: enumeração de sub-grafos de tamanho k de um dado grafo procura de padrões em redes sociais ou biológicas problema da colocação das rainhas num tabuleiro problemas divide-and-conquer e branch-and-bound árvore de execução do Prolog Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling10 8 / 21 Árvore de procura a árvore é construída dinamicamente durante ou com a execução podem ter sub-problemas comuns em caminhos diferentes Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling11 9 / 21 Procura em paralelo Considere-se: uma pesquisa DFS da árvore scheduling estático: enquanto houver processadores não ocupados, atribuir a próxima nova tarefa. Podemos e devemos fazer melhor! Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling12 10 / 21 Estratégias de Scheduling Dinâmico As estratégias de scheduling dinâmico podem ser: centralizadas I I I assumem um scheduler central que reúne informação sobre todo o sistema, nomeadamente carga, e toma as decisões de transferência de tarefas. funciona bem num sistema de memória partilhada, mas com um número de processadores reduzido. é ineficiente num sistema de memória distribuída, pois requer muita comunicação para manter o scheduler com informação actualizada. distribuídas I I existe um scheduler por processador que tomam decisões autónomas sobre partilha de trabalho. o objectivo é manterem o seu processador ocupado e balancear a carga no sistema. Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling13 11 / 21 Scheduling Centralizado O scheduler tem uma fila única de tarefas 1. responde a pedidos dos processadores (ou workers), ou 2. os workers acedem autonomamente à fila, sincronizando através de locks Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling14 12 / 21 Master-Worker Estratégia centralizada em sistemas de memória distribuída Decisão de distribuíção de tarefas concentrada no master-worker Workers executam ciclo: I I I I pedir trabalho receber trabalho executar trabalho enviar resultado Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling15 13 / 21 Questões com a estratégia centralizada Evitar contenção no acesso à fila de tarefas partilhada Suponha que as tarefas correspondem a um intervalo de índices de um ciclo (iterações independentes). Seja K o tamanho da tarefa: I I Se K for grande, reduz-se contenção no acesso à fila. Se K for pequeno, simplifica-se o balanceamento de carga. Ideias: I I I Usar tarefas maiores no início (maior número de índices) para evitar overhead excessivo e menores mais próximo do fim. No acesso de ordem i à fila, seleccionar uma tarefa com tamanho dRi /pe, onde Ri é número total de tarefas em sobra e p é o número de processadores. O tamanho Ki é função do trabalho sobrante, mas também da variância do custo da tarefa. F F F I a variância é estimada usando informação histórica variância elevada ⇒ tamanhos menores variança baixa ⇒ tamanhos maiores Enquadrar diferenças de processamento. Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling16 14 / 21 Filas distribuídas de tarefas (ou Work-Pools) Extensão natural para sistemas distribuídos, mas também para memória partilhada. Permite que workers sem trabalho tomem a iniciativa de procurar trabalho, ou que workers ocupados possam partilhar tarefas. São úteis quando I I se está com um sistema de memória distribuída existe muita sincronização ou muitas tarefas pequenas Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling17 15 / 21 Scheduling Distribuído As decisões de partilha podem ser: sender initiated (ou work distribution)- os workers mais ocupados, procuram outros menos ocupados para lhe atribuir tarefas. I melhor para pequenas cargas. receiver-initiated (ou work-stealing) - os workers que ficam sem trabalho, procuram um worker com muito trabalho e pede para partilhar. I melhor para grandes cargas do sistema. Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling18 16 / 21 Como seleccionar um worker a quem pedir trabalho Round-robin: I targetk = (targetk + 1) mod procs. polling/stealing aleatório I Quando um processador precisa de trabalho, selecciona aleatoriamente um processador e envia-lhe um pedido. repete último: I I por questões de localidade pode haver vantagem voltar a pedir ao último worker, se este não tiver trabalho, passa a um dos esquemas anteriores. Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling19 17 / 21 Como dividir trabalho? Número de tarefas a distribuir? Dividir a meio? Quais as tarefas: I I topmost: tarefas do início da fila (mais antigas) bottomost: tarefas do fim da fila (mais recentes) Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling20 18 / 21 Estratégias de partilha 1/2 Sender-initiated Quando um worker gera uma nova tarefa, o seu scheduler procura o processador mais livre e atribui-lhe a tarefa para execução. Se não for bem sucedido, guarda na fila local. Receiver-initiated As tarefas geradas por workers são colocadas sempre na sua fila local. Quando um worker procura uma tarefa para execução, o scheduler procura primeiro na sua fila local. Se estiver vazia, então procura uma tarefa fora (também referido por work-stealing). Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling21 19 / 21 Estratégias de partilha 2/2 Adaptative I Combina as estratégias sender-initiated e receiver initiated. Os workers são classificados como Senderds ou Receivers mediante o valor de um parâmetro Threshold. Um worker é sender se o númerod e tarefas na sua fila estiver acima do threshold, será receiver no caso contrário. Adaptative II Melhora a heurística Adaptative I, introduzindo dois parâmetros Low e High para classificar os workers como Senders, Receivers ou Neutrals. Um worker muda dinamicamente o seu comportamento, função da quantidade de trabalho na sua fila: I I I #tasks < high ⇒ comportamento sender #tasks < low ⇒ comportamento receiver neutral se low ≤ #tasks ≤ high Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling22 20 / 21 Exemplo da evolução das filas de tarefas Fernando Silva (DCC-FCUP) PPD: Balanceamento de Carga e Scheduling23 21 / 21
Baixar