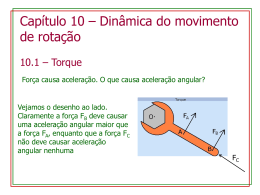
Rotação Rotação Nota Alguns slides, figuras e exercícios pertencem às seguintes referências: HALLIDAY, D., RESNICK, R., WALKER, J. Fundamentos da Física. V 1. 4a.Edição. Ed. Livro Técnico Científico S.A. 2002; TIPLER, P. A.; MOSCA, G. Física. Volume 1, 5a Ed, Rio de Janeiro: LTC - Livros Técnicos e Científicos, 2006; da Silva, E. Z, et al., “Curso de Física Geral F-128”; 1 Rotação O que foi visto até agora? Cinemática do ponto; Leis de Newton 1a lei (referenciais); 2a lei (Fr=ma); 3a lei (forças de ação e reação); Movimento de translação Sistemas de muitas partículas; Conservação do momentum linear. E a rotação?? 2 Rotação Corpo rígido x Rotação • O corpo rígido é aquele no qual a distância entre duas partículas quaisquer é fixa; eixo de rotação • Estamos interessados em estudar a rotação de um corpo rígido em torno de um eixo fixo qualquer; • O eixo de rotação não precisa ser um dos eixos de simetria do corpo. 3 Rotação Corpo rígido x Rotação • A linha de referência é perpendicular ao eixo de rotação e fixa ao corpo. O seu deslocamento define o ângulo de rotação do corpo rígido. eixo de rotação • O sentido da rotação é dado pela regra da mão direita. • O ângulo aumenta em uma rotação no sentido anti-horário e vice-versa. Obs: Normalmente, escolhe-se o eixo z, como eixo de rotação, e o eixo x como a posição inicial da linha de referência. 4 Rotação Cinemática da rotação • Cada ponto (ou partícula) do corpo rígido executa movimento circular. • Considere o movimento da i-ésima partícula Pi da superfície de um disco. • A distância percorrida pela partícula quando o disco gira de um ângulo dθ, será dsi ri d ( em radianos) • Tanto a distância percorrida, dsi, quanto a distância em relação ao eixo de rotação, ri, variam de uma partícula para outra. Porém, o deslocamento angular, dθ, é o mesmo para qualquer partícula do disco. 5 Rotação Cinemática da rotação • Se o disco der uma volta completa em torno de seu eixo de rotação, a partícula Pi terá percorrido a distância si 2ri • Assim, o deslocamento angular ∆θ, será 2ri 2 rad 360 o 1 rev ri 6 Rotação Cinemática da rotação Como dθ é o mesmo para todas as partículas do corpo rígido, sua taxa de variação temporal, chamada de velocidade angular, ω, também será. Assim, definimos a velocidade angular do disco como d dt Rotação sentido anti-horário: θ aumenta ω > 0 Rotação sentido horário: θ diminui ω < 0 A unidade de ω é radianos por segundo, porém, como radiano é adimensional, a dimensão da velocidade angular é o inverso do tempo [T]-1. 7 Rotação Cinemática da rotação A taxa de variação temporal da velocidade angular é conhecida como aceleração angular, α, e é dada por d d 2 dt dt 2 ω crescente ω decrescente ω > 0 α > 0 ω > 0 α < 0 ou ou ω < 0 α < 0 ω < 0 α > 0 A unidade de α é radianos por segundo ao quadrado, porém, como radiano é adimensional, a dimensão da aceleração angular é o inverso do tempo ao quadrado [T]-2. 8 Rotação Movimento circular uniformemente acelerado MCUA → constante Faremos t1 0 e t2 t (0) 0 e (0) 0 t (t ) 0 dt 0 t (1) 0 t t 1 2 (t ) 0 (t ' )dt ' 0 (0 t ' )dt ' 0 0t t (2) 2 0 0 Colocando t em evidência em (1) e substituindo em (2), teremos 0 2 ( 0 ) 2 2 etc... Comparando com o movimento linear (t ) x(t ) , (t ) v(t ) e (t ) a(t ) 9 Rotação Exemplo Exercício 11.6P, Cap.11, Halliday, 4ª. Ed. t (t ) 0 (t ' )dt ' 0 (t ) 0 at 4 bt 3 10 Rotação Exemplo t (t ) 0 (t ' )dt ' 0 (t ) 0 0 at '4 bt '3 dt ' t 0 t5 t4 (t ) 0 0t a b 5 4 (c) Se a = 20 rad/s5 e b = 7 rad/s4, quantas voltas a roda terá dado após 4s? Considere ω0 = 0. 45 44 0 20 7 3648 rad 581x (2 ) rad 5 4 A roda gira 581 voltas em 4s. 11 Rotação Relação com as variáveis lineares • Velocidade linear da i-ésima partícula vt ,i dsi vt ,i dt onde vt,i é tangente à curva de movimento da partícula. • vt vesus w dsi ri d d vt ,i ri dt dt dt vt ,i ri 12 Rotação Relação com as variáveis lineares • Aceleração tangencial da i-ésima partícula d at ,i ri dt dt dvt ,i at ,i ri • Aceleração centrípeta da i-ésima partícula ac ,i 2 t ,i v ri 2 ri ac,i ri ri at , i ac ,i at , i 2 13 Exemplo Rotação PN f e ,máx Fc e N Mac e Mg M Rw2 max wm ax e g R 14 Exemplo Rotação Determine a aceleração tangencial da moeda (e do disco) até o instante antes da moeda escorregar. Considere que o disco estava inicialmente em repouso e que realizou 10 revoluções completas até atingir a velocidade angular wmax, em um MCUA. 2 2 f i w w 2 f i wm2 ax e g 22 10 40R at R e g e g at R 40R 40 15 Rotação Energia Cinética de Rotação • Energia cinética da i-ésima partícula 1 1 2 K i mi vi mi (ri ) 2 2 2 • Energia cinética de um sistema de partículas será a soma da energia cinética das partículas do sistema. Ou seja, 1 1 2 2 2 K mi (ri ) mi ri 2 i i 2 A quantidade entre parênteses, no termo à direita, é conhecido como momento de inércia I do sistema, em torno do eixo de rotação. Esta quantidade é o equivalente à massa na rotação. I mi ri i 2 1 2 K I 2 16 Rotação Cálculo do Momento de Inércia I mi ri i 2 Momento de inércia de um sistema discreto de partículas No caso de um corpo rígido, devemos considerar que o corpo é composto por partículas de massa infinitesimal, mi dm NOTA de forma que a somatória acima torna-se a integral dl em 1D dm dA em 2D dV em 3D Para corpos cujas massas são distribuídas uniformemente: I r dm 2 m constante L m constante A m constante V 17 Exemplos Rotação Calcular o momento de inércia de 4 partículas de massa m nas extremidades de um retângulo formado por hastes de massa desprezível, conforme figura abaixo. •1o. Caso: eixo passando pelo ponto médio das hastes de comprimento 2a I mi ri 4ma 2 2b 2 i 2a •2o. Caso: eixo passando por duas massas ao longo do lado de comprimento 2b I mi ri 2 i m(0) 2 m(0) 2 m(2a) 2 m(2a) 2 8ma 2 18 Exemplos Rotação Anel uniforme de massa M, em torno do eixo perpendicular passando pelo seu centro M M dm R d 2 R 2 R 2 2 2 M I R dm R d MR 2 2 0 d dl R d R ou I R 2 dm R 2 dm MR2 Disco uniforme, de massa M, em torno do eixo perpendicular passando pelo seu centro M M dm 2 r dr 2 2 R R dr 4 R R 2M 2M r I r dm r r dr 2 2 R R 4 0 2 R 2 0 1 MR 2 2 r dA 2 r dr 19 Rotação Exemplos Cilindro sólido uniforme, de massa M, em torno de seu eixo central. Podemos aproveitar o resultado obtido para um disco uniforme. Vamos considerar que o cilindro é constituído por vários discos empilhados, de massa dm. Assim o momento de inércia, dI, de cada disco será ½dmR2. Somando o momento de inércia de todos os disco, teremos dm 1 1 2 2 I dI dmR R dm 2 2 1 2 I MR 2 20 Rotação Tabela de momentos de inércia 21 Rotação O teorema dos eixos paralelos No capítulo anterior, vimos que a energia cinética de um sistema de partículas pode ser escrito da forma 2 K 12 Mvcm Krel onde Krel é a energia cinética das partículas em relação ao centro de massa. Considere que um corpo rígido gire com uma velocidade angular, ω, em torno de um eixo qualquer, a uma distância h de um eixo paralelo que passe pelo CM. Quando o corpo gira de um ângulo dθ, em relação ao eixo de rotação, ele também girará de dθ em relação a qualquer outro eixo paralelo (ver próximo slide). 22 Rotação Rotação de 90º em torno do eixo O θi,o = 0o θi,cm = - α θf,o = 90o θf,cm = 90o - α ∆θo = ∆θcm = 90o cm O Pi θ = 0o 23 Rotação Rotação de 60º em torno do eixo O θi,o = 0o θi,cm = - α θf,o = 60o θf,cm = 60o - α Pi cm cm ∆θo = ∆θcm = 60o O Pi 24 Rotação 25 Rotação O teorema dos eixos paralelos O movimento do corpo, em relação ao centro de massa, será então uma rotação com velocidade angular ω. Desta forma, a energia cinética relativa ao CM será Krel I cm 1 2 2 onde Icm é o momento de inércia do corpo em relação ao CM. Por sua vez, a velocidade tangencial do CM relativa ao eixo de rotação é vcm = hω. Assim, a energia cinética do CM será 1 2 2 Mvcm 12 M (h)2 12 M 2h2 A energia cinética do corpo será 2 K 12 Mvcm Krel 12 Mh2 2 12 I cm 2 12 (Mh2 I cm ) 2 como K 12 I 2 I Mh 2 I cm I 26 Rotação Exemplo Cilindro sólido uniforme, de massa M, em torno do eixo que passa pela geratriz. 27 Exemplo Rotação Cilindro sólido uniforme, de massa M, em torno do eixo que passa pela geratriz. Como o centro de massa do cilindro está sobre seu eixo central, o momento de inércia do corpo em relação ao CM será I cm MR2 1 2 Assim, o momento de inércia que em torno de eixo passando pela geratriz será I Mh I cm MR MR 2 2 1 2 2 I MR 3 2 2 28 Rotação 2ª Lei de Newton para a Rotação A rotação de um corpo depende de como as forças são aplicadas. Forças aplicadas na direção tangencial (diametralmente opostas): o disco gira! Forças aplicadas na direção radial: o disco não gira! 29 Rotação 2ª Lei de Newton para a Rotação Considere uma partícula, presa a uma barra sem massa, girando em torno de um eixo, conforme figura ao lado. Aplicando a 2ª Lei de Newton para a componente tangencial da força, teremos Ft ma t Fazendo at = rα e multiplicando-se ambos os lados por r (distância entre a partícula e o eixo de rotação), teremos. rFt ( mr 2 ) I Onde I é o momento de inércia da partícula. O produto à esquerda, rFt, é conhecido como torque, τ, e é o equivalente à força na rotação. Ou seja, Ft r I 30 Rotação 2ª Lei de Newton para a Rotação Para um corpo rígido, podemos escrever o torque resultante (associado à força resultante) aplicado à i-ésima partícula com massa dm, como d i ,res ri dm 2 Para todo o corpo rígido, devemos somar o torque devido à todas as partículas infinitesimais. Assim, d ri dm 2 i , res r dm I 2 i Da mesma forma que a força resultante sobre um sistema é devido à soma das forças externas atuando sobre ele, o torque resultante também será. Ou seja res,ext I 2ª Lei de Newton para a Rotação 31 Rotação Cálculo do torque ou Ft Fsen rsen Ft r Frsen Frsen F onde o braço (ou alavanca) l é a distância perpendicular entre O e a linha de ação. Ft no mesmo sentido do movimento: τ >0 Ft no sentido contrário ao movimento: τ < 0 32 Rotação Exemplo: Torque devido à Gravidade Força gravitacional sobre a i-ésima partícula com massa dm: d F g ,i dmg As forças gravitacionais sobre cada partícula exerce um torque em torno do eixo de rotação (ver próximo slide). O torque gravitacional resultante no corpo é a soma de todos estes torques infinitesimais. Podemos calcular o torque gravitacional, considerando que todo o peso esteja concentrado em um único ponto: o centro de gravidade. 33 Torque gravitacional 34 torque máximo torque máximo torque mínimo (=0) Ft r F 35 CG torque máximo torque máximo torque mínimo (=0) Ft r F 36 Pergunta 1: O movimento abaixo é possível? O movimento dependerá da localização do centro de gravidade. Se o centro de gravidade estiver à direita do eixo de rotação, o movimento será horário. Caso contrário, o movimento será antihorário. No exemplo abaixo, o centro de gravidade está a esquerda do eixo de rotação, ocasionando um movimento anti-horário. Pergunta 2: Qual é o movimento do corpo se o centro de gravidade estiver sobre a linha vertical que passa pelo eixo de rotação? O corpo não se moverá! 37 Rotação Exemplo: Torque devido à Gravidade O torque sobre a i-ésima partícula com massa dm, devido à gravidade será: d i ri dFg ,t Fg i dmgxi onde xi é o braço (ou alavanca) da força gravitacional sobre a i-ésima partícula. Para um corpo rígido, podemos escrever o torque gravitacional como sendo a soma de todos os torques infinitesimais sobre as partículas do corpo. Ou seja, grav d i xi gdm 38 Rotação Exemplo: Torque devido à Gravidade Próximo à superfície, podemos considerar a gravidade constante (campo gravitacional uniforme), de forma que teremos grav x dmg Mx i cm g grav Mgxcm O torque pode ser calculado como se todo o peso estivesse concentrado no centro de massa. Ou seja, em um campo gravitacional uniforme, o centro de gravidade e o centro de massa de um corpo coincidem. 39 Rotação Exemplo Máquina de Atwood com uma polia com massa Considere uma máquina de Atwood, onde a polia possua uma massa M e possa ser considerada um disco uniforme, conforme figura abaixo. Qual a aceleração dos blocos? Despreze o atrito sobre o sistema. 40 Exemplo Rotação Máquina de Atwood com uma polia com massa Massa 1 Massa 2 Polia F m g T m a Fy T2 m2 g m2a T R T R I y 1 1 1 1 2 1 1 1 2 a 2 MR R 2 MRa T1 T2 2 Ma Disco uniforme Então a=rα m1 m2 a m m 1 M 1 2 2 g 41 Rotação Representação vetorial do torque O produto vetorial entre dois vetores A e B, é definido como sendo um terceiro vetor C, cujo módulo é dado pela multiplicação dos módulos dos vetores A e B com o seno do ângulo entre eles. A direção e sentido do vetor C pode ser obtido pela regra da mão direita. Assim, teremos que C A B ABsen nˆ onde n é o vetor unitário, perpendicular a A e B, que representa a orientação de C. O torque é o produto vetorial entre os vetores r e F. r F rFsen nˆ O torque é definido relativamente a um ponto no espaço. 42 Rotação Condição de não-escorregamento Considere uma corda sendo desenrolada de uma roda girando, conforme figura abaixo. Se não houver escorregamento, a corda deverá se mover com a mesma velocidade tangencial da roda na posição onde a corda se encontra. Considerando que a corda esteja enrolada no perímetro externo da roda, sua velocidade de desenrolamento será então vt R diferenciando at R Condição de não-escorregamento Obs: além da velocidade tangencial, uma corda sendo desenrolada também poderá ter uma velocidade transversal, esta última é perpendicular à primeira e ocorre quando, além de ser desenrolada, a corda ainda oscile (balance) de uma lado para o outro. 43 Rotação Exemplo Exercício 71 – Cap. 9, Tipler, 5ª Ed. Um carro de 1200 kg está sendo descarregado por um guindaste. Para o momento mostrado na figura ao lado, o mecanismo do guindaste retira o freio e o carro desce a partir do repouso*. Durante a descida do carro não existe escorregamento entre a corda (de massa desprezível), a roldana e o tambor do guincho. O momento de inércia do tambor do guincho é de 320 kg.m2, e da roldana é 4 kg.m2. O raio do tambor é de 0,80 m e o da roldana é de 0,30 m. Encontre a velocidade do carro quando ele bate na água. * Trecho modificado, pois no livro está errado! 44 Exemplo Exercício 71 – Cap. 9, Tipler, 5ª Ed. Rotação Sistema: tambor + roldana + carro + Terra Wext = 0 ∆Etérm= ∆Equím= ∆Eoutros= 0 Conservação da energia mecânica do sistema! Neste caso, a energia potencial armazenada no sistema, será transformada em energia cinética de translação do carro e de rotação do tambor e da roldana. Fazendo Ug = 0 na superfície da água, teremos onde Pela condição de não-escorregamento, podemos escrever: e 45 Rotação Potência O trabalho, dW, realizado por uma força F atuando sobre um corpo qualquer, quando este se desloca de ds, é dado por dW Fds Se o corpo estiver em rotação, então, no ponto de aplicação da força teremos que ds = rdθ, de forma que dW Frd Mas, sabemos que τ = rF é o torque exercido pela força F. Assim, dW d Potência é a taxa com a qual o torque realiza trabalho, ou seja dW d P dt dt P 46 Rotação Corpos que Rolam Pedalar é possível graças à capacidade de rolamento dos corpos Rolamento = translação + rotação 47 Rotação Rolamento sem escorregamento Quando um corpo está em movimento de rolamento sem escorregamento, a todo instante, os pontos que estiverem em contato com a superfície estarão instantaneamente em repouso. Neste instante, todo o corpo estará girando em torno do eixo que passa pelo ponto de contato. P v vcm r R Eixo instantâneo de rotação: perpendicular ao plano no ponto de contato Caminho do ponto de contato R Ponto de contato 48 Rotação Rolamento sem escorregamento O ponto P se move com velocidade: v r Para o centro de massa: vcm R derivando acm R No topo da roda, r = 2R, de forma que este ponto move-se com o dobro da velocidade do centro de massa. 49 Rotação Rolamento sem escorregamento Decomposição do rolamento em rotação + translação vCM vCM translação rotação + vCM vCM 2vCM = rolamento v0 50 Rotação Rolamento sem escorregamento Considerando que o centro de massa permaneça sempre sobre o ponto de contato, então, o ponto de contato e o centro de massa se deslocaram de um mesmo valor s=R. vCM vCM s R s R s A energia cinética de um corpo ou sistema pode ser escrito da forma, 2 K Mvcm Krel 1 2 No rolamento, a energia cinética será a energia cinética de translação do centro de massa, ½Mvcm2, mais a energia cinética de rotação em torno do centro de massa, ½Icmω2, ou seja K Mv I cm 2 1 2 2 cm 1 2 51 Rolamento sem escorregamento Rolamento em um plano inclinado: CM acelerado Teorema: Se os torques são calculados em relação a um sistema de referência que se move com o centro de massa, então a 2ª Lei de Newton para a rotação pode ser aplicada sempre que o centro de massa sofrer aceleração, e o torque será considerado em relação a um sistema de referência preso ao centro de massa. Isto é τres,cm = Icmα Observe que o teorema acima é válido mesmo sendo o referencial do CM não-inercial! 52 Exemplo Exemplo 9-15 – Cap. 9, Tipler, 5ª Ed. Uma bola sólida de massa m e raio R rola sem deslizar descendo um plano inclinado que forma um ângulo acima da horizontal. Encontre a aceleração do centro de massa e a força de atrito entre o plano e a bola. y v CM P R Fn x f 53 Exemplo Exemplo 9-15 – Cap. 9, Tipler, 5ª Ed. y Pergunta 1: O atrito é cinético ou estático? Para um rolamento sem escorregamento, o atrito deve ser estático. v CM P R Pergunta 2: A velocidade angular pode ser constante? Fn x f O não escorregamento requer que a velocidade angular aumente enquanto a bola role para baixo. Pergunta 3: Se há aumento da velocidade angular, há torque? O aumento da velocidade angular significa existência de aceleração angular e consequentemente de torque. Pergunta 4: Quais forças podem produzir torque? A única força que possui componente tangencial à rotação é a força de atrito. 54 Exemplo Exemplo 9-15 – Cap. 9, Tipler, 5ª Ed. y v CM P R Fn x F Ma cm Na direção y: N Mg cos 0 (1) Na direção x: Mgsen f Macm (2) f R I CM (3) Torque relativo ao CM: f Condição de rolamento sem escorregamento: acm R (4) Substituindo (4) em (3) e este em (2), teremos: acm gsen I cm 1 MR 2 (5) 55 Exemplo Substituindo (5) em (2), teremos: Mgsen f 2 MR 1 I cm (6) Momento de inércia de uma esfera sólida em relação ao CM: I CM 52 MR 2 Substituindo (7) em (5) e (6), teremos: (7) acm 75 gsen e f 72 Mgsen 56 Rolamento sem escorregamento: plano inclinado O resultado obtido em (5) e (6), aplica-se a qualquer corpo em rolamento sem escorregamento, cujo centro de massa esteja no centro geométrico do corpo. Para estes corpos teremos: I CM MR 2 onde será 2/5 para a esfera, 1/2 para um cilindro sólido, 1 para uma argola, etc. Desta forma, as equações (5) e (6) podem ser generalizadas como acm gsen 1 Mgsen f 1 1 Quanto maior for o , maior será a força de atrito e menor a aceleração Considerando que os três corpos foram abandonados do repouso, a esfera alcançará a base em primeiro lugar, depois o cilindro sólido e por último, a argola. 57 Rolamento sem escorregamento: plano inclinado Como o atrito é estático, não há dissipação de energia e, por isto, podemos utilizar a conservação da energia mecânica para o sistema corpo+Terra, de forma que: h K U 0 1 2 Mv I cm mgh 1 2 2 cm 2 Substituindo Icm = MR2 e ω = vcm/R (condição de não escorregamento), teremos 2 cm v 2 gh 1 58 Rolamento sem escorregamento: plano inclinado 2 cm v 2 gh 1 2gh vcm 1 Para uma partícula descendo um plano inclinado sem atrito, sabemos que v 2gh que é sempre maior que vcm, independente do valor de . Observe também que vcm não depende nem da massa nem do raio do corpo. A força de atrito estática deve ser sempre igual ou menor do que o atrito estático máximo eN = emgcos (ver exemplo anterior). Assim, teremos Mgsen f e mg cos 1 1 tg (1 1 ) e Isto significa que se tg for maior que (1+-1)e, o corpo irá escorregar ao se mover para baixo pelo plano inclinado. 59
Baixar