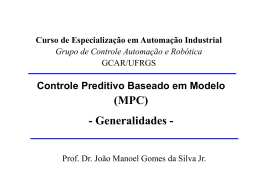
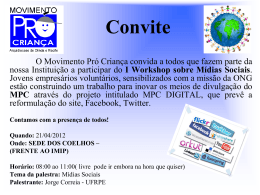
APLICAÇÃO DE GPC EM ANESTESIA CLÍNICA Ivna Catão Fadlo Curi – IC Aluna de graduação do curso de Engenharia Eletrônica do Instituto Tecnológico de Aeronáutica Bolsista PIBIC-CNPQ; Brasil; e-mail: [email protected] Takashi Yoneyama – PQ Professor do Departamento de Controle, Divisão de Eletrônica, Instituto Tecnológico de Aeronáutica Brasil; e-mail: [email protected] Este trabalho versa sobre o controle dos efeitos de relaxação muscular e do grau de inconsciência de pacientes submetidos a anestesia, através da administração das drogas atracurium e isoflurano, respectivamente. Para esta análise, foi utilizado o controle por GPC (Gereralizedl Predictive Control). Abstract This article studies the control over the effects of muscle relaxation and over unconsciousness of clinical patients submitted to anesthesia, through the administration of atracurium and isoflurano drugs, respectively. For this investigation, we used GPC (Generalized Predictive Control). 1. INTRODUÇÃO O desenvolvimento da anestesia permitiu o progresso dos processos cirúrgicos. Hoje, um grande número de doenças é tratado por esses procedimentos. Deste modo, esses tratamentos estão mais acessíveis à população, a qualquer idade e com bastante segurança se comparado a alguns anos atrás. Tamanho avanço em termos cirúrgicos se deve à permanente pesquisa na área, promovendo redução de custos e aumento de confiabilidade das diversas técnicas envolvidas nestas práticas clínicas. Este trabalho versa sobre a construção de um controlador eficiente e suficientemente simples para aplicação de anestésicos, em particular do isoflurano e do atracurium. A técnica utilizada será a do GPC (Generalized Predictive Control), que se baseia no controle preditivo para sistemas lineares, e no nosso trabalho a técnica será considerada sem restrições. 2. METODOLOGIA A base do controle por MPC (model predictive control – controle de modelos preditivos) foi estudada. Após a seleção de um modelo adequado para se implementar o controle por GPC, foram realizadas simulações do controlador, objetivando a melhor desempenho possível do sistema. Para isto, foi preciso investigar várias funções do Matlab, com respeito a linearização, discretização e ao Toolbox de controle preditivo. 3. CONTROLE 3.1 Descrição do MPC (Model Predictive Control) O MPC apresenta algumas vantagens com relação aos outros métodos de controle. Ele é fácil e intuitivo, é aplicável a uma grande variedade de processos de diversos níveis de complexidade, inclusive de sistemas instáveis. Ele apresenta ainda um mecanismo de compensação intrínseca para os tempos mortos do processo, além de compensar distúrbios mensuráveis usando controle retroativo. O MPC é de fácil implementação, é linear, permite a inclusão sistemática de restrições ao projeto do sistema controlado, considera referências futuras e ainda tem muito a ser desenvolvido e estendido. 1 Suas desvantagens mais visíveis são a necessidade de um modelo definido do processo a ser controlado apropriado para a implementação e o fato deste tipo de controle não ser muito robusto nem garantir establidade . Nas figuras 1 e 2 (referência 6) ilustramos a estratégia desta forma de controle. Figura1. Estratégia de controle do MPC. Figura 2. Estrutura básica do MPC. Neste método, as saídas futuras (y(t+k/t), k=1,2,...,N) no horizonte N são estimados a cada instante t mediante a utilização do modelo, e dependem das entradas e saídas até este instante t, e dos sinais de controle futuros (u(t+k/t), k=0,1,...,N-1). O modelo, que estima as saídas futuras, utiliza a otimização de determinado critério de modo a manter o processo o mais próximo possível da trajetória de referência w(t+k). Este critério é, em geral, uma função quadrática do erro entre o sinal de saída avaliado pelo método e a trajetória de referência. Uma solução explícita pode ser obtida se o modelo for linear e se não houver restrições. Caso contrário, um método de otimização interativa é necessária. A função objetivo tem por propósito fazer a futura saída y acompanhar uma referência w dentro de certo horizonte de predição a definir. A expressão geral para a função objetivo é dada por: J ( N1 , N 2 , N u ) = N2 Nu j = N1 j =1 ∑ δ ( j )[ yˆ (t + j | t ) − w(t + j )]2 + ∑ λ ( j )[∆u(t + j − 1)]2 onde N1 é o mínimo horizonte de custo; N 2 é o máximo horizonte de custo (relacionado à saída); N u é o horizonte de controle (relacionado à entrada) e δ ( j ), λ ( j ) são seqüências que consideram o comportamento futuro, sendo em geral valores constantes ou seqüências exponenciais. A função custo J trabalha com o conceito de “receding horizon”, isto é, um horizonte que está sempre se deslocando. Os horizontes de custo demarcam o limite em que é desejável que a saída acompanhe a referência. A estratégia do controle preditivo permite que o sistema reaja antes da mudança de referência efetivamente ocorrer, evitando assim, o efeito do atraso na resposta do processo. 3.2 Descrição do GPC (Generalized Predictive Control) O objetivo deste método é calcular a seqüência de controles futuros de modo a maximizar uma certa função custo multiestágio, definido em uma região de predição. Este método possibilita uma solução analítica (quando não há restrições) e trabalha com o conceito de horizonte de controle. O GPC utiliza os modelos CARMA (Controller Auto-Regressive Moving-Average) ou CARIMA para seu desenvolvimento. O modelo CARMA é adequado para a maioria dos sistemas SISO, após linearização em torno do ponto de operação do processo. Este modelo é descrito por: A( z −1 ) y (t ) = z − d B( z −1 )u (t − 1) + C ( z −1 )e(t ) onde: −1 A( z −1 ) = 1 + a1 z −1 + a2 z −2 + ... + ana z − na , −1 −2 C ( z ) = 1 + c1 z + c2 z + ... + cnc z B ( z −1 ) = b0 + b1 z −1 + b2 z −2 + ... + bnb z − nb , − nc , d é o atraso de transporte do sistema, u(t) é a seqüência de controle do sistema, y(t) é a seqüência de saída do sistema e e(t) é o ruído branco de média zero. 2 O modelo CARIMA (Controller Auto-Regressive Integrated Moving-Average) é descrito como: A( z −1 ) y (t ) = z − d B ( z −1 )u (t − 1) + C ( z −1 ) e(t ) com ∆ = 1 − z −1 . Por simplicidade, o polinômio C ( z −1 ) é ∆ escolhido com valor unitário. 3.3 MPC Multivariável A grande parte dos fenômenos, em particular as industriais, que requerem controle, possuem várias variáveis controladas e manipuladas, isto é, um número múltiplo de entradas e saídas. Em certos casos, as pares de variáveis de uma entrada e de uma saída podem ser consideradas independentes. Nestes casos, o problema multivariável pode ser subdividido em diversos problemas simples SISO (single input single output). Contudo, na maioria das vezes, as diversas variáveis de entrada e saída são interdependentes. Neste caso, o problema é tratado como MIMO (multiple inputs multiple outputs). Estas interações podem acarretar desempenho insatisfatório ou mesmo instabilidade. O desenvolvimento matemático do MPC automaticamente se adequa a sistemas multivariáveis. Esta constitui uma de suas principais vantagens. A análise da função custo para processos multivariáveis deve levar em conta as interações entre suas diversas variáveis. Alguns processos podem ser mais rápidos que outros, e alguns outros processos podem precisar de um controle mais rígido. Estes efeitos são acentuados quando a função custo não é escolhida adequadamente. Portanto deverá ser dada uma atenção à distribuição correta dos parâmetros de ajuste de pesos de J para caracterizar fielmente o sistema proposto. A maioria dos sistemas apresenta atrasos ou tempos mortos, que devem ser consideradas na modelagem do sistema. Estes atrasos devem ser convenientemente abordados na análise de controle, caso se deseje um controle eficiente do sistema. 4. MODELO 4.1 Controle de consciência, analgesia e relaxação muscular por GPC A anestesia clínica visa controlar o nível de inconsciência do indivíduo, a sua relaxação muscular e o nível de analgesia, conforme já foi visto em tópicos anteriores. O controle da inconsciência e a relaxação muscular versam sobre o próprio processo operatório, ao passo que a importância sobre o controle sobre o nível de analgesia é representativa no período de recuperação pós-operatório. Vimos que a quantificação destes três processos de anestesia é bastante difícil e incerto. Vários métodos foram propostos para quantificar estas três áreas da anestesia. Um bom modelo matemático do processo é indispensável para o projeto de controladores avançados. Estudos de identificação em animais têm produzido modelos e parâmetros que confirmam a elevada variabilidade e a não-linearidade da farmacodinâmica da relaxação induzida por drogas. O modelo utilizado neste estudo tem sido utilizado extensivamente no projeto e simulação de controladores com abordagem tanto qualitativa quanto quantitativa. 4.2 Modelo Matemático do Atracurium A farmacologia é freqüentemente usada para descrever o efeito de certas drogas, como o atracurium, no processo de relaxação muscular. Foi visto que a farmacologia se subdivide em duas categorias: a farmacocinética e a farmacodinâmica. A famacocinética estuda as relações entre as doses de drogas administradas e a concentração da droga nas diversas partes do organismo. Estas partes do organismo são agrupadas em modelos compartimentais de acordo com as semelhanças em termos de resposta metabólica da droga. 3 Já foi mostrado que após a injeção da droga, a concentração plasmática do atracurium cai rapidamente em duas fases, que correspondem a distribuição e a eliminação. Este modelo considera uma saída adicional no compartimento periférico para a eliminação (dada por k20), em acordo com a lei da “eliminação do Hofmann”. A descrição dos dois compartimentos do modelo são feitas pelas seguintes equações: x1 = −(k10 + k12 ) x1 + k21 x2 + u e x2 = k12 x1 − (k20 + k21 ) x2 , onde: x1 é a concentração do atracurium no instante t; x1 é a taxa de variação da concentração do atracurium e u é a entrada da droga no organismo do paciente. Aplicando Laplace nas duas equações acima e as reordenando nos levam à função de transferência dada abaixo: s + k20 + k21 X 1 ( s) = U ( s ) ( s + k10 + k12 )( s + k20 + k21 ) − k12 k21 Estudos experimentais de Weatherley et al. (1983) encontraram os seguintes valores para os parâmetros do modelo farmacocinético: k12 + k10 = 0.26 min −1 k21 + k20 = 0.094 min −1 Logo, tem-se k12 ⋅ k21 = 0.015 min −2 X 1 ( s) 9.94(1 + 10.64 s ) = U ( s ) (1 + 3.08s )(1 + 34.42 s ) A farmacodinâmica cuida da relação entre a concentração da droga e o efeito produzido no paciente. Existe um considerável atraso entre a primeira dose da droga e o efetivo relaxamento muscular. Este efeito é não-linear e se chama de margem de segurança. Um terceiro compartimento, o “compartimento do efeito” é introduzido ao modelo anterior para representar aspectos temporais do efeito da droga. No compartimento relativo a esta parte do modelo, a variação da concentração da droga é descrita: x E = k1E x1 − k E 0 xE ou X E ( s ) = k1E X 1 s + kE 0 A relação entre o efeito e uma concentração específica é feita pela relação não linear: Eeff = Emax X (50)α 1+ E α XE XE é a concentração do atracurium e XE(50) é a concentração da droga quando ela produz um efeito de 50 porcento. Os parâmetros do modelo foram encontrados experimentalmente por Whiting e Kelman, 1980 e por Weatherley et al., 1983 Combinando a parte linear dos modelos farmacocinético e farmacodinâmico, obtemos a seguinte expressão: K =1 X E ( s) K (1 + T4 s )e −τ s = U ( s ) (1 + T1s )(1 + T2 s )(1 + T3 s ) τ = 1min onde: T1 = 4.81min T2 = 34.42 min T3 = 3.08 min T4 = 10.64 min A totalidade do modelo pode ser expressa em termos da equação acima mais a não-linearidade contida na equação de Hill. Alternativamente, a não linearidade pode ser substituída por um atraso de tempo em série com um elemento de saturação. 4.3 Modelo Multivariável de Anestesia 4 O modelo multivariável de anestesia engloba os efeitos da relaxação muscular e do grau de inconsciência. Neste modelo, o atracurium é responsável pela relaxação muscular ao passo que o isoflurano é responsável pela indução da inconsciência. A medição da relaxação muscular é feita via processamento dos sinais da resposta evocada de respostas EMG produzidos pelo instrumento “Datex Relaxograph” no braço do paciente. O nível de inconciência é obtido pela medição da pressão arterial obtida a cada minuto no aparelho “Critikon Dinamap”. Diversos estudos de identificação (referência 7) levaram ao modelo abaixo para representar estes dois efeitos: relaxação muscular e nível de inconsciência (em termos da pressão arterial). Paralysis G11 ( s ) G12 ( s ) U1 ⋅ ∆MAP = 0 G22 ( s ) U 2 (1 + 10.64 s )e − s 0.27e − s −15.0e −0.42 s ; G(12) ( s ) = ; G(22) ( s ) = G(11) ( s ) = (1 + 4.81s)(1 + 34.42 s)(1 + 3.08s ) (1 + 1.25s)(1 + 2.83s ) (1 + 2 s ) O modelo total não linear é obtido pela combinação da expressão da matriz de Paralysis e da variação do MAP com a não-linearidade de Eeff. 5. SIMULAÇÕES Inicialmente, foram feitas simulações do sistema SISO, logo após, foi feita a simulação do sistema completo MIMO. No Matlab, foi realizada a linearização e depois a discretização do modelo completo. As simulações foram feitas com a função simcon do Matlab. Simulação para M=P=1: Simulação para M=1 e P=2: Simulação para M=1e P=10: Simulação para M=2 e P=6 (modelo MIMO): Simulação para M=2 e P=6: Observa-se que a duplicação do horizonte de predição (P) quando o horizonte de entradas (M) é unitário para o sistema SISO provoca uma melhora do desempenho do sistema. O tempo de subida praticamente reduz de um terço. Porém ela também causa um leve overshoot de quase 25% na saída. O aumento mais exagerado de P (10x) já reduz o tempo de subida para cerca de um oitavo sem overshoot. Outra grande vantagem deste último consiste na economia com entrada para manter aquele estado. 5 Observe que o caso de M=2 e P=6 também resulta em um excelente resultado em termos de velocidade, de economia, de estabilidade e de ausência de overshoot. Verificamos ainda que o sistema se manteve estável em todas as simulações, e os seus valores de regime convergiram para os pontos de operação. A simulação do modelo MIMO forneceu os valores de regime esperados, e convergiram com excelente velocidade. 6. CONCLUSÃO Neste trabalho, primeiramente foi ressaltada a importância do estudo dos meios de controle da anestesia para administração em ambiente clínico e para desenvolvimento de diversos outros setores médicos. Também se verificou a dificuldade de se medir a profundidade da anestesia, em seus três aspectos: hipnose, analgesia e relaxação muscular, sendo a hipnose a mais complicada delas. Foi possível verificar ainda as vantagens da monitoração de anestésicos via controlador projetado com base na teoria preditiva. Embora tenhamos realizado um estudo para um modelo sem restrições e com uma pequena não-linearidade, baseado na técnica do GPC, a teoria é vasta e apresenta soluções alternativas para vários processos particulares. Pretende-se dar continuidade ao estudo das técnicas de controle preditivo, utilizando para sua análise os processos anestésicos. Uma próxima etapa seria a avaliação da resposta do sistema via o método da seleção de parâmetros de Monte Carlo. Como o projeto do controlador requer a especificação de vários parâmetros, o método Monte Carlo realiza um grande número de simulações. Estes testes abordam a diversidade de parâmetros de paciente para paciente, ou mesmo em um mesmo paciente, a fim de garantir a robustez do método. 7. BIBLIOGRAFIA 1 - M. Mahfouf, A. J. Asbury, D. A. Linkens; Unconstrained and Constrained Generalised Predictive Control of Depth of Anaesthesia during Surgery; 2003; Revista Control Engineering Practice 11. pp15011515; 2 - Konrad S. Stadler, Daniel Leibundgut, Stephan Locher, RolfWymann, Adolf H.Glattfelder, Alex M. Zbinden; Advances in Model-Based Closed-Loop Control of Hypnosis; 2002; Automatic Control Laboratory, ETZ Zurich, Switzerland; Department of Anaesthesiology, University Hospital Berne, Switzerland; Proceedings of the Second Joint EMBS/BMES Conference Houston, TX, USA, pp284-285; 3 - B. Jacobson, J. G. Webster; Medicine and Clinical Engineering; Prentince-Hall, Inc., Englewood Cliffs, New Jersey 07632, pp 232-250 e 508-517; 4 - E.F. Camacho, C. Bordons; Model Predictive Control; 1999; Springer; 5 - J.A. Rossiter; Model-Based Predictive Control – A Pratical Approach; 2003; CRC Press, University of Texas at Austin, Austin, Texas, 2003; 6 - D.A. Linkens; Intelligent Control in Biomedicine, 1994; chapter 3, chapter 4. Taylor&Fancis; 7 - D.A. Linkers, M. Mahfonf; Advances in Model-Based Predictive Control, chapter Gereralized Predictive Control in Clinical Anaesthesia; 1994; Oxford University Press. 8. AGRADECIMENTOS O projeto teve apoio e financiamento do CNPQ-PIBIC. 6
Baixar