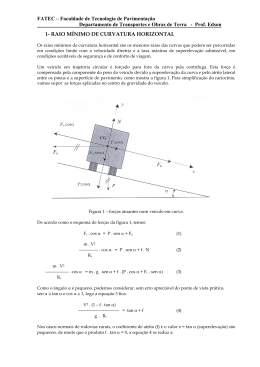
Estradas – Conceitos básicos As estradas fornecem um meio de conectar dois (ou mais) núcleos comunitários, de modo a facilitar comunicação e integração regional. Para que isto ocorra, existem os seguintes fatores determinantes: a) Intercâmbio de informações; b) Interligação de culturas; c) Incentivo ao desenvolvimento econômico. As estradas quase sempre geram uma melhoria na qualidade de vida de seus arredores, seja na área de saúde, trabalho ou até mesmo aumentando a liberdade de acesso das populações. Sua construção deve seguir normas técnicas e se proceder da maneira mais econômica possível, atendendo a todos os objetivos listados no ato de seu planejamento. Por exemplo, em uma interligação regional, deve-se construir uma interligação principal, que deverá atender às necessidades globais no menor percurso possível (esta estrada deverá ser construída de modo a atender demandas maiores de tráfego) e uma rede de interligações secundárias, de menor porte. Estradas são construídas de modo a respeitar: a) Fatores políticos: ligações de interesse militar (fronteira, litoral), ou quando se necessita expansão geográfica; b) Fatores econômicos: quando ligam centros de comércio e de produção industrial; c) Fatores sociais: permitem o acesso a recursos básicos de sobrevivência. O transporte provoca, ainda, influências negativas (por exemplo, impactos ambientais, aumento da criminalidade) e positivas (maior conforto e sociabilidade). Antes de se construir estradas, deve-se levar em conta as vantagens e desvantagens dos demais sistemas de transporte, bem como o custo-benefício de cada obra realizada: - Aeroviário: transporte de mercadorias de elevado valor e baixa densidade. Apresenta tarifas elevadas; -Hidroviário: transporte de mercadorias de valor baixo e com alta densidade. No Brasil, este sistema não é tão aproveitado como deveria. -Ferroviário: transporte de mercadorias de valor médio em média densidade. Este sistema, em declínio no Brasil, está tomando força novamente com o aumento da produção de grãos e de minérios. -Rodoviário: transporte de mercadorias de valor médio em baixa densidade, é de longe o tipo de transporte mais utilizado no Brasil, o que vem tornando o mercado cada vez mais saturado. Topografia aplicada Antes de se construir uma estrada, deve-se estudar onde a mesma será inserida. Existem diversas maneiras de se realizar este estudo: com o uso de cartas topográficas (ou aerofotogramétricas) ou mesmo fotografias aéreas. Ao utilizar-se de cartas topográficas, existe a possibilidade de realizar estudos analíticos preliminares com a observação das curvas de nível, para obtenção dos chamados pontos notáveis: a) Espigão: linha formada pelos pontos mais altos que dividem duas bacias hidrológicas; b) Talvegue: linha que une os pontos de convergência de águas, formando rios perenes ou temporários – sempre perpendicular às curvas de nível; c) Divisor de águas: linha da qual a água sempre se afasta. Separa duas bacias hidrológicas; d) Contraforte: superfície que corresponde o meio entre o talvegue e o divisor de águas; e) Garganta: é o ponto mais baixo do espigão (local ideal de passagem de via). As curvas de nível permitem um levantamento simplificado de um perfil de terreno, utilizandose de planos verticais imaginários. Se a região a ser atravessada for íngreme, deve-se desenvolver o traçado. Neste caso, o eixo da estrada é ampliado, tornando a declividade menor. Os métodos mais utilizados são: - Construção de túneis (ou viadutos): Apresenta-se como a solução mais cara, deve-se estudar o orçamento da movimentação de terras e analisar todas as opções disponíveis antes de adotar estas soluções. - Adaptação às encostas (ou em zigue-zague): soluções mais econômicas, mas devem ser pesadas com o impacto ambiental gerado, e descartadas sempre que se apresenta um VDM muito grande. Se os pontos a serem atravessados forem de mesma bacia hidrológica em mesmo vale, há dois tipos de transposição: - Rios caudalosos: ao transpor rios caudalosos, devem-se construir pontes sempre cruzando o talvegue na perpendicular. Isso porque uma transposição diferente ocasionaria um aumento nos custos por elevar a área e os tabuleiros a serem construídos. - Córregos e riachos: ao transpor córregos e riachos, a transposição pode ser realizada de forma esconsa (não perpendicular). Para ambos os casos, notadamente para o segundo, não se deve transpor paralelamente ou sobre o eixo do talvegue, uma vez que o aterro contínuo causado pelas águas dificultaria o processo de drenagem. Se houver um ponto no fundo no vale e outro nas vertentes ou mesmo vales secundários, deve-se optar por construir o eixo da estrada acompanhando as curvas de nível, de modo a provocar uma menor movimentação de terras, ao mesmo tempo em que produz um traçado mais sinuoso e com rampas as quais devem ser de declividade limitada. Para cruzar espigões, deve-se fazê-lo em seus pontos mais baixos, nas gargantas, diminuindo as declividades e as movimentações de terra. Velocidades As velocidades dependem da vontade do motorista, condições e características do veículo, do tempo e da via, da velocidade máxima permitida e da fiscalização. Em um projeto de uma via, a velocidade levada em consideração é denominada diretriz (ela não deve variar ao longo do eixo da via, sempre que possível). É ela que define todos os elementos geométricos da mesma e deve atender à maioria dos motoristas, objetivando sempre a segurança operacional. Ela é selecionada de acordo com a classe da pista e a topografia. A Classe de pista é relativa ao volume de tráfego previsto para a mesma. A topografia influencia o traçado de modo que este se torna mais duro quanto maior seja a velocidade e mais acidentado seja o terreno. Traçados duros são aqueles de difícil obtenção sem a realização de grande movimentação de terras ou construção de obras especiais. Pela velocidade de operação (média das velocidades observadas), pode-se classificar as rodovias em: Classe 0, IA, IB, II, III, IV A, IV B (em ordem decrescente de VDM e velocidade diretriz) e, pela topografia, pode existir rodovias planas, onduladas e montanhosas. Distâncias de segurança A distância de visibilidade é determinada pela estimativa de extensão do campo visível, medida tanto no projeto em planta como no projeto em perfil, adotando-se, então, a menor das distâncias obtidas. A partir dela, obtêm-se as distâncias de visibilidade de frenagem e a de visibilidade de ultrapassagem. Por comparações, pode-se concluir se um trecho é ou não seguro para ultrapassagem, entre outras considerações. A distância de visibilidade de frenagem é a mínima distância que um veículo deve percorrer antes de parar. É composta por duas parcelas: distância de percepção e reação (d1) e distância de frenagem efetiva (d2). Chega-se então, na seguinte equação: Vd é a velocidade diretriz (km/h), f é o coeficiente de atrito pavimento-pneu e i, a declividade da rampa (m/m). A distância mínima de segurança entre veículos deve ser mantida praticamente constante para o caso de frenagens ocasionais. Neste caso, supõem-se desacelerações iguais, e, portanto, não há frenagem efetiva. O tempo de reação também passa a ser menor (0.75 s, no lugar dos 2.5 s considerados anteriormente), uma vez que o motorista está mais atento ao locomover-se em fila. É importante também o comprimento dos veículos, padronizado em 8 m. Dessa forma, são sugeridas duas equações para a distância de segurança: L é o comprimento do veículo. A segunda equação apresenta um termo extra, quando os veículos envolvidos apresentem distâncias de frenagens muito diferentes entre si. A distância de visibilidade de ultrapassagem é determinada considerando-se a ultrapassagem de um veículo, acessando-se ao final da manobra o espaço mínimo obrigatório entre veículos. Convenções: 1 é o veículo que irá ultrapassar, 2 o veículo a ser ultrapassado e 3 é o veículo que vem em faixa oposta. Critério da AASHTO: considera-se uma velocidade constante do veículo 2 igual ao do veículo 1 no início da ultrapassagem, o motorista 3 perceberá a manobra antes de sua concretização, o veículo 1 sofrerá uma aceleração de 15 km/h em relação ao veículo 2 e o veículo 1 termina a manobra deixando espaço de segurança em relação ao 3. As parcelas serão a distância inicial de ultrapassagem (D1), distância percorrida em faixa oposta (D2) e a distância de segurança (D3). A expressão completa então é: T1 é o tempo da manobra inicial (s), m é a diferença de velocidades (km/h), a aceleração é dada em km/h.s, t2 é o tempo em faixa oposta e D3 é a distância de segurança. Critério de Coquand: neste método, não se considera espaço de segurança entre o veículo que ultrapassa e o que vem em faixa oposta. Os valores obtidos são próximos ao método anterior. S é a distância de segurança (em m). A rodovia deve apresentar distância visível maior ou igual à distância de segurança de frenagem. Sugerem-se trechos não maiores que 2 km, onde a distância de visibilidade seja maior ou igual à distância de segurança de ultrapassagem. Reconhecimento Reconhecimento é uma fase preliminar ao desenvolvimento do projeto, onde se toma conhecimento das características do terreno que se deseja atravessar, quais sejam: topografia, presença de rios, utilização do solo, capeamento vegetal, cruzamento com outras vias etc. É ela que determinará uma primeira estimativa do custo de implantação de uma rodovia. Para esta fase, é imprescindível o uso de cartas topográficas ou de fotografias aéreas, pois minimiza o trabalho de observação em campo ao se estabelecer os pontos obrigatórios de passagem da estrada, levantando-se as tangentes definitivas e seus respectivos azimutes e extensões. A diretriz básica é denominada linha papagaio. Após o primeiro estabelecimento, é realizada a fase de reconhecimento terrestre com equipe de topógrafos, os quais farão uma definição precisa da posição das tangentes finais. É também nesta fase que se obtém os pontos necessários para o traçado de curvas de nível e de perfis longitudinais. Aerofotogrametria é o processo de se estudar regiões da superfície terrestre a partir de pares de fotos aéreas tiradas de diferentes posições, onde se determina a altimetria , por meio da utilização de um estereoscópio, aparelho utilizado para observação tridimensional de pares de fotos aéreas. As fotografias aéreas são tiradas de aeronaves especiais, que não apresentam desvio lateral tão grande, orientação de rota precisa, suporte de câmeras etc. Os filmes utilizados devem ser de baixa sensibilidade, de modo a obter até mesmo detalhes menores. O tamanho padrão de cada fotografia é de 23x23cm. As condições ideais para um vôo aerofotogramétrico incluem uma boa visibilidade, reduzida umidade relativa do ar e posição do sol específica (o sol não pode estar em seu nascente ou poente, de modo a evitar o excesso de sombras, nem a pino, já que a ausência de sombras também compromete a fotografia). As fotografias então são agrupadas em um fotoíndice, mosaico composto pelas fotografias de determinada área. Observações: O vôo aerofotogramétrico deve se planejado em diversas linhas de vôo, contendo pontos de contato (conhecidos) os quais devem ser anotados no plano de vôo. Escala: valor médio que compensa as irregularidades do terreno, inclinações e convergência de lentes. Onde m é a relação escalar (1:m), H é a altura de vôo e f é a distância focal da lente. As lentes podem classificar-se de acordo com esta distância, sendo: <70mm – grande angular; =153mm ou =210mm – média; =300mm – longa; >500mm – teleobjetiva. Onde L é a extensão lateral do quadrado da área fotografada, B a distância entre pontos fotografados e A é o afastamento entre as linhas de vôo. As fotos devem ser recobertas em 60% em sua extensão longitudinal, e 30% em sua extensão lateral. Restituição é o processo de transformação das fotografias em ortofotos, mais próximas do mapeamento da região, onde os erros provocados pela não uniformidade do vôo são corrigidos. Outro processo que visa facilitar a orientação e controle dos dados gerados em um projeto de estradas é o SIG – Sistema de Informacões Geográficas. Nele, e em conjunto com softwares CAD, permitem o desenvolvimento de projetos com maior rapidez, objetividade e qualidade. Classificação de rodovias Segundo o tráfego: Volume Diário Médio (VDM): VDM > 40.000 VDM > 2.000 1.000 < VDM < 2.000 500 < VDM < 1.000 VDM < 500 CLASSIFICAÇÃO: Auto-estrada Classe especial 1ª classe 2ª classe 3ª classe Segundo critérios político-administrativos: Federais: codificadas pelas letras BR e por um número contendo 3 dígitos, onde o primeiro é relativo ao alinhamento, e os dois últimos ao azimute ou região. Classificação Radiais: ligam pontos à capital Longitudinais: de norte a sul Transversais: de leste a oeste Diagonais: de NE a SO ou NO a SE Outra 1º Dígito 0 1 2 3 4 Estaduais: codificadas pelas letras de cada estado e por um número contendo 3 dígitos, semelhantemente às federais. Em São Paulo, há duas classificações: Classificação Radiais: ligam pontos à capital Transversais: ligam pontos no interior Número Par. Representa o Azimute do alinhamento médio Ímpar. Representa a distância aproximada até a cidade de São Paulo Municipais: classificam-se de maneira semelhante ao seu estado. Vicinais: rodovias de VDM muito baixo, em São Paulo, são denominadas SPV. Urbanas: ruas e avenidas, expressas ou não, mantidas pela prefeitura. Segundo a topografia: Classe Plana Ondulada Montanhosa Escarpada Declividade < 10 m/km 10 m/km < H < 40 m/km H aprox. 40m/km H> 40m/km Segundo a função: Podem ser arteriais, coletoras, ou locais. Classificação técnica: 0, I A, I B, II, III, IV A, IV B. Curvas Horizontais Circulares Simples As tangentes horizontais de uma estrada devem ser concordadas com segmentos curvilíneos permitindo aos motoristas fluidez de tráfego. As curvas de tipo simples são utilizadas para desviar-se de obstáculos que elevariam excessivamente o custo da obra e, também, para harmonizar via e topografia do local. Segundo alguns especialistas, é importante projetar curvas horizontais mesmo quando o traçado poderia ser exclusivamente retilíneo, de modo a evitar o efeito hipnótico, que acarretaria sonolência ao motorista e reduziria a segurança da via. O raio de concordância deve, sempre que possível, ser de magnitude elevada, de modo a suavizar o traçado. O menor raio de concordância horizontal é função da estabilidade dos veículos (força centrípeta) e da visibilidade. A locação da curva é feita pelo ponto de intersecção das tangentes, bem como a deflexão dos alinhamentos (diferença azimutal). Onde: O – centro da curva circular; PC – ponto de começo; PT – ponto de término; PI – ponto de intersecção; AC – ângulo central; Rc – raio horizontal; t – tangente interna; te – tangente externa; D – desenvolvimento circular; G – grau da curva; ∂x – deflexão em extensão x (o símbolo ∂ sozinho indica deflexão na curva) Grau da curva é o ângulo com centro em O que apresenta comprimento de uma estaca, 20 m. Deflexão na extensão 20m é o ângulo entre a tangente de um ponto na curva e o alinhamento com o ponto sobre a curva a 20m. Equações: Locação: Por irradiação: Locam-se todos os pontos da curva (assumindo-se que não haja obstáculos entre o PC e o PT) instalando-se um teodolito no centro O, obtendo-se a distância por taqueometria. Por deflexões simples: Instala-se o teodolito em todos os pontos consecutivos e distantes entre si de uma estaca. Mira-se ∂20 graus e mede-se a distância de 20m para todos os pontos a serem obtidos. Por deflexões sucessivas: Instalam-se teodolitos em um ou mais pontos da curva, mirando-se ∂20 graus, ∂40, ∂60, e assim sucessivamente. Raio mínimo das curvas: É importante que o raio seja sempre que possível bem maior que o raio mínimo, em função da estabilidade e da visibilidade. Em função da estabilidade: deve haver dois tipos de força centrípeta para que haja estabilidade do veículo: compensada – gerada pela inclinação transversal do pavimento (superelevação – e) e não compensada – gerada pelo atrito pneu-pavimento. Assumindo-se um raio Rc, centro O, velocidade constante v e superelevação e, tem-se uma série de forças atuantes no veículo, e equação final seguinte: O primeiro termo refere-se à aceleração centrípeta descompensada (atrito), e o segundo refere-se à compensada (superelevação). Substituindo-se os valores, obtém-se uma equação para encontrar o raio da curva: Onde v é dado em km/h, Rc em metros. Os demais valores são constantes. Os valores máximos de superelevação dependem do método utilizado, do clima e da região onde se encontra a via. No geral para o Brasil, pode-se dizer que a superelevação máxima é em torno de 12% para rodovias, e 6% em vias urbanas. Os valores máximos do coeficiente de atrito lateral são função da velocidade do veiculo (uma maior velocidade reduz a eficiência do sistema de amortecimento), qualidade e condições do pneu e do piso, presença ou não de água etc. Para maior segurança (evitar escorregamento lateral), o coeficiente de atrito máximo é definido em função da velocidade segura. No método de Coquand, o máximo é 0,4, do instante de escorregamento. Já nos outros métodos, há variação com a velocidade, mas fica próximo de 0,16. Portanto, para raio mínimo em função da estabilidade, basta utilizar os valores de ft e e máximos na equação de raio da curva. Em função da visibilidade, deve-se estudar as condições geométricas do tipo de curva vertical a ser adotada, observada no perfil longitudinal. De maneira geral, a distância mínima do campo visível é: Basta determinar o valor de M para cada curva horizontal circular o mínimo valor de M e medirse perpendicularmente ao eixo da via. Assim: Onde: h é a altura de visada do motorista, usualmente 0,75m, P o tamanho da plataforma. Escolha da superelevação A superelevação é uma inclinação para dentro em uma curva horizontal para diminuir a necessidade de o motorista virar a direção. É função da aceleração centrípeta, que não altera a velocidade escalar do móvel. Tal inclinação deve ser bem escolhida, vez que uma inclinação elevada causaria o escorregamento ou tombamento dos veículos na via. e Em vias urbanas, a superelevação é evitada, uma vez que induz o motorista a elevar sua velocidade, o que implicaria em redução da segurança das vias. Método de Barnett: Palavra-chave: conforto A relação entre a aceleração centrípeta compensada e a total ideal seria de 100%, no entanto, com base nos valores máximos de ft e da superelevação, chega-se ao valor de apenas 43%. O método de Barnett adota, para maior conforto do motorista, 55%. Para tal, a velocidade de operação é tomada como sendo 75% da de projeto. Se o motorista estiver a uma velocidade maior, ele já deve compensar a curva virando a direção. Método de La Torre: Palavra-chave: percepção Segundo este método, há uma aparente imperfeição gerada pelo fato de que a superelevação não é alterada a partir de seu valor máximo, gerando insegurança. Portanto, neste método, a superelevação varia de maneira constante e diretamente proporcional à curvatura. O motorista deve então manter o mesmo “peso” no volante, independente da curvatura. (O conforto é questionável) Método da AASHTO: Palavra-chave: raios intermediários Neste método os valores de superelevação são elevados em raios intermediários, devido à constância da superelevação em curvas de raios reduzidos. É um método complexo, e necessita de ábacos para melhor entendimento. Curvas horizontais circulares com transição em espiral Quando o motorista passa de um trecho reto para um trecho em curva, a aceleração centrípeta passa de nula a um valor numérico proporcional ao quociente entre o quadrado da velocidade e o raio. Este ponto é denominado descontinuidade física. A curva de transição é então projetada de modo a facilitar a variação da curvatura, superelevação e, portanto, melhor controle do veículo. A curva que melhor se adapta para este processo é a espiral (ou clotóide), que se ajusta melhor à variação da aceleração centrípeta e, mesmo com funções transcendentais, são de fácil construção e cálculo – utilizando-se para isso, calculadoras programáveis ou microcomputadores. O comprimento mínimo da espiral (denominado LS) é determinado seguindo-se a fórmula: N é a constante da espiral, definido como sendo o produto entre o raio e sua extensão. J é a variação da aceleração centrípeta que não deve ser maior que 0,6 m/s²/s. Dessa forma, para valores de velocidade em km/h e raio de concordância em metros, tem-se a fórmula: θs é o ângulo total da transição. AC é o ângulo central (igual à deflexão azimutal). A equação da espiral, sendo uma equação transcendental não possui derivadas, devendo ser obtidas de maneira aproximada (por série de Taylor). As suas coordenadas são então obtidas pelas seguintes equações: Onde θ é o ângulo entre a origem e um ponto P qualquer na espiral. O ponto onde termina o trecho em espiral e inicia-se o trecho circular denomina-se (Xs,Ys) é calculado utilizando-se Ls e θs. Elementos principais de projeto: TS SC CS ST O’ PI LS Xs Início da 1ª espiral Transição 1ª espiral – circular Transição circular – 2ª espiral Término da 2ª espiral Centro deslocado do trecho circular Intersecção das tangentes Comprimento da espiral Abscissa do SC (ref. TS) Ys TT K P P+Rc AC α θs D Ordenada de SC (ref. TS) Tangente total Abscissa de O’ (ref. TS) Afastamento circular-tangente Ordenada de O’ (ref. TS) Deflexão dos azimutes Ângulo do trecho circular Ângulo total do trecho em espiral Comprimento do trecho circular Para se construir uma espiral, deve-se medir à partir do PI, para ré e vante, o comprimento TT, localizando-se TS e ST. Destes pontos, localiza-se K e Xs. Com o K encontrado, traçam-se perpendiculares, visando-se encontrar o centro O’ (no cruzamento de ambas retas). A partir do ponto encontrado com Xs, traçam-se perpendiculares com extensão Ys, determinando-se SC e CS. O trecho delimitado deve ser traçado com compasso ou similar. A espiral deverá ser desenhada usando-se pelo menos 3 pontos de uma tabela de locação. Os pontos devem ser unidos com boa concordância. Métodos de construção: Centro e tangentes conservados: método não aconselhável, pois deve-se reduzir o raio da curva. Centro e raio conservados: neste método, as tangentes são deslocadas, modificando o eixo da rodovia. Raio e tangentes conservados: neste método, altera-se o centro O. Não há alteração no eixo previsto, nem no raio. Este processo é preferido. As fórmulas então ficam: E é a distância do PI à curva, utilizada para conferência. O estaqueamento é feito da seguinte maneira: EST(TS) = EST(PI) – TT ; EST(SC) = EST(TS) + LS; EST(CS) = EST(SC) + D ( ) ; EST(ST) = EST(CS) + LS. Variação da seção transversal na superelevação A superelevação é garantida pela variação da seção transversal gradual das faixas de tráfego, mantendo a pista contínua, em harmonia e estética. Um exemplo da variação da seção transversal pode ser observado na figura abaixo: Algumas fórmulas podem facilitar o cálculo e a construção dos diagramas de superelevação: S é a superelevação linear entre os bordos da plataforma, função do número de faixas de tráfego (n), da largura da faixa (L) e da superelevação de projeto. α é a declividade relativa entre o eixo e o bordo. Deve ser verificado entre os valores máximos permitidos em cada método, por meio de tabelas que relacionam este valor com a velocidade de projeto. Em curvas circulares simples, deve-se adotar um comprimento fictício de transição, também tabelado. Na construção da superelevação, deve-se adotar uma linha de rotação, que pode ser o eixo (E), o bordo interno (BI) ou o bordo externo (BE). Quando se adota o BI, a seção transversal “sobe”, facilitando o projeto de drenagem; quando se adota o BE, o impacto visual é menor. No entanto, o mais usual é adotar o eixo. O acostamento deve manter a declividade constante, a menos no caso de uma variação acentuada da declividade da curva. Nestes casos, deve-se diminuir ou inverter a declividade do acostamento, evitando o risco de capotagem (este processo acaba por dificultar a drenagem). Diagramas de superelevação – aspectos gerais: ROTAÇÃO PELO EIXO: PELO BORDO INTERNO: PELO BORDO EXTERNO: A altura Ha é determinada multiplicando-se a largura da faixa pela sua declividade transversal, a altura Hac é determinada de maneira semelhante (só que, neste caso, utilizando-se a declividade do acostamento). A declividade do acostamento é geralmente em torno de 7%, no entanto, quando há reversão deve-se calcular com declividade em torno de 2%. Superlargura A superlargura (∆L) é uma largura extra, estabelecida de modo a garantir a entrada correta do veículo sobre a faixa de tráfego. Deve-se observar a aceleração centrípeta, que garante um aumento da velocidade à medida que o raio diminui. Ela deve ser projetada seguindo-se gabaritos de veículos padronizados da AASHTO, e calculada da seguinte maneira, partindo das premissas: - A largura 2xL da pista simples é função da largura do veículo padrão U e do espaço de segurança C, feito de modo a evitar impactos laterais; - A largura da pista (plataforma) é então 2xL = 2xU + 4xC; No trecho de curva circular, além do tamanho normal (2xLc), deve-se acrescentar as dimensões C (espaço de segurança), ∆U (diferença de trajetória das rodas), U (largura do veículo), Z (espaço de segurança – dificuldade de entrar em curvas) e ∆F (diferença nos párachoques dianteiro e traseiro). Pela metodologia de Barnett, despreza-se ∆F e obtém-se a superlargura pela expressão abaixo: A superlargura, ao longo da transição deve variar de forma suave e continua. Se o comprimento da transição for elevado, indica-se variar a largura da pista em torno de 60 a 75 m. (Na prática, se a superlargura for menor que 50 m, a mesma não é indicada). Ela pode ser distribuída ao longo do bordo interno, gerando um ligeiro deslocamento do eixo (distribuição da superlargura ao longo das faixas de tráfego) e redução no raio da curva. Se for feita distribuindo-se igualmente para cada um dos bordos não há variação do eixo. A distribuição apenas junto ao bordo externo NÃO DEVE SER ADOTADA. O motorista pode se iludir com o aumento da largura e o índice de acidentes pode elevar-se. Testes 1)A melhor maneira de se lançar tangentes de uma estrada é: a) Com retas perpendiculares às curvas de nível b) Com retas passando nos pontos mais altos dos espigões c) Com retas em cima das linhas de talvegue d) Com retas obliquas e não perpendiculares aos talvegues de grandes rios e) N.d.a. ← 2)A estabilidade em curvas horizontais é função: a) Do coeficiente de atrito longitudinal b) Da velocidade de operação c) Da inclinação longitudinal da estrada d) Aceleração centrípeta (não da aceleração longitudinal) ← e) N.d.a. 3)Na escolha da superelevação pelo Método Barnett: a) Tem-se proporção constante e/f t para qualquer raio b) Não se tem força de atrito transversal para raios grandes e velocidade de operação← c) Não se tem força de atrito longitudinal para raios grandes e velocidade diretriz d) Tem-se e/f t variável em função da velocidade de operação e da visibilidade e) N.d.a. 4)Na locação da transição de curvas circulares com transição em espiral: a) Utiliza-se o θs variável para locar estaca a estaca b) Utiliza-se o ângulo do arco tangente de y/x crescente para locação das estacas← c) O Xs cresce com o ângulo i d) Utiliza-se k e p para locação da transição, estaca a estaca e) N.d.a. 5)Na locação da superlargura: a) Utiliza-se o comprimento da transição da curva anterior para sua locação b) É ideal locar a superlargura ao longo do bordo externo nas curvas circulares simples c) Nas curvas circulares com longas transições é ideal ao longo de todo o bordo externo e interno, de TS a SC d) O lançamento ao longo do bordo externo causaria curva reversa← e) N.d.a. 6)Na relação benefício-custo: a) Pode-se ter uma diretriz se o empreendimento é viável ou não← b) Serve apenas para se estimar os custos do projeto executivo c) Serve apenas para se estimar os custos do anteprojeto e de construção d) Serve para estudos de viabilidade de estradas com função política e de segurança nacional e) N.d.a. Comentários aos testes 1) A construção de retas perpendiculares as curvas de nível, bem como se passando pelos pontos mais altos dos espigões (deve-se passar pela garganta, ponto mais baixo) elevaria excessivamente as rampas, portanto não é indicada. Os talvegues não devem ser cruzados paralelamente, pois isso ocasiona problemas de drenagem. Rios caudalosos só podem ser atravessados perpendicularmente. 2) O coeficiente de atrito longitudinal, a velocidade de operação e inclinação podem ser consideradas constantes ao longo da curva. A aceleração centrípeta interfere na estabilidade e varia no decorrer da curva. 3) No método de Barnett não há força de atrito transversal para velocidade de operação, para C baixo (raio grande). 4) θs e Xs são constantes (valores do final da espiral). K e P são pontos de construção, não de locação. É o ângulo obtido deste arco tangente que se coloca no teodolito. 5) Não se loca a superlargura ao longo do bordo externo pois esta prática gera acidentes. A superlargura em longas transições é fixa e não precisa ser construída ao longo de todo o processo. A superlargura deve ser locada individualmente, curva por curva. 6) A relação benefício-custo determina a viabilidade de um projeto. Serve para todas as funções indicadas nas alternativas b e c e não só para a indicada na alternativa d.
Baixar