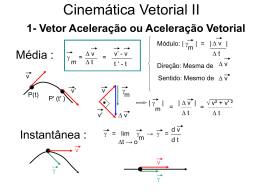
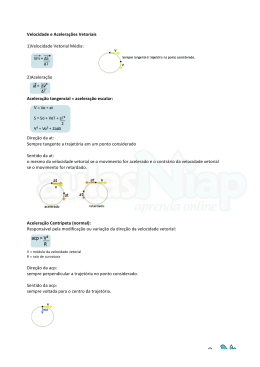
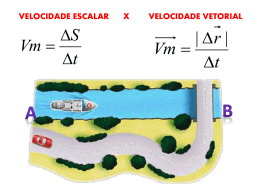
Grandezas da Cinemática • Posição • Deslocamento • Velocidade média • Velocidade instantânea • Aceleração média Física 1 – Unidade 03 Cinemá Cinemática em 2 e 3 dimensões Prof. Hamilton José José Brumatto - DCET/UESC • Aceleração instantânea • Movimentos especiais: Movimento Circular Uniforme e Lançamento oblíquo. Posição Vetorial Deslocamento Vetorial z z zr rf zr r ∆r r Oxyz yr Oxyz y xr r yr y xr x • r = rx xˆ + ry yˆ + rz zˆ, ri x ou r r = ( xr , y r , z r ) r r r • ∆r = rf − ri 1 Velocidade Média Vetorial Velocidade Instantânea Vetorial r z rf zr Queremos: v vM r ∆r Oxyz ri = r ∆r no limite em que ∆t → 0 ∆t É possível uma derivada vetorial? yr y xr Sim! r r r r dr r (t + ∆ t ) − r (t ) = lim v = ∆t→ 0 dt ∆t r r r ∆r r f − ri v = • vM = ∆t t f − ti x Velocidade Instantânea Vetorial Aceleração Vetorial z r rf zr Oxyz ri v A velocidade vetorial é tangente à trajetória yr xr x r r r r dr r (t + ∆t ) − r (t ) = lim • v= dt ∆t →0 ∆t y Igualmente: aM = r ∆v ∆t A aceleração média é a variação da velocidade no tempo Também r r r r dv v (t + ∆ t ) − v (t ) a = = lim ∆t→ 0 dt ∆t A aceleração instantânea é a derivada da velocidade em relação ao tempo 2 Aceleração Vetorial •Não há uma vinculação direta da aceleração com a trajetória. •No entanto como a velocidade é tangente à trajetória, podemos projetar a aceleração em duas componentes, uma paralela à tangente e outra perpendicular. •A aceleração paralela à tangente é responsável por variar o módulo da velocidade. •A aceleração perpendicular varia a direção da velocidade. Aceleração Instantânea Vetorial v a a a // ┴ •A aceleração decomposta em uma aceleração paralela à tangente à trajetória e outra perpendicular a esta tangente. Decomposição do Movimento Decomposição do Movimento •A notação vetorial nos permite decompor um vetor na direção dos eixos perpendiculares do referencial. •A mesma decomposição pode ser feita para as equações do movimento (são vetores): •O mesmo se aplica para a equação da velocidade e da aceleração: r r (t ) = rx (t ) xˆ + ry (t ) yˆ + rz (t ) zˆ • Em cada direção utilizamos uma equação do movimento independente. r v (t ) = vx (t ) xˆ + v y (t ) yˆ + v z (t ) zˆ r a (t ) = a x (t ) xˆ + a y (t ) yˆ + a z (t ) zˆ • Estudamos cada movimento como cinemática em uma direção e compomos o movimento final. 3 Movimentos Especiais • Como na cinemática unidimensional, alguns movimentos especiais merecem nossa atenção: • Movimento Uniforme Vetorial: A velocidade é constante mas escrita na forma vetorial. (MU) • Movimento Uniformememente Variado: • Aceleração constante (não necessariamente na direção do movimento. (MUV) • Aceleração com intensidade constante, mas sempre perpendicular ao movimento (MCU) Movimento Uniforme. • Velocidade constante: r r r r = r0 + v .t • A equação do movimento pode ser decomposta como: rx = r0 x + v x t ry = r0 y + v y t r r r r = rx xˆ + ry yˆ + rz zˆ rz = r0 z + v z t Movimento Uniformemente Variado Movimento Uniformemente Variado • 1º Caso: Aceleração constante paralela a um dos eixos: (lançamento oblíquo). • 1º Caso: Aceleração constante paralela a um dos eixos: (lançamento oblíquo). • São dois movimentos (2 dimensões) • Horizontal, na reta horizontal alinhada à pontaria do canhão. Movimento que indica o alcance horizontal. • Vertical, perpendicular à horizontal. Movimento que indica a altura do projétil. 4 Movimento Uniformemente Variado Movimento Uniformemente Variado – Lançamento Horizontal • Horizontal: Somente possui a velocidade de início e não sofre nenhuma aceleração. Logo é MU: s x = s0 x + v x t • Vertical: Possui a velocidade de início, mas sofre a aceleração da gravidade: 2 MUV: 1 s y = s0 y + v0 y t − 2 gt Movimento Uniformemente Variado – Lançamento Horizontal Movimento Circular Uniforme • Também é um movimento acelerado. • A intensidade da velocidade não varia, no entanto sua direção varia continuamente. • Como a aceleração paralela à velocidade é nula, somente temos a aceleração perpendicular. • Esta aceleração é radial em um MCU. 5 Movimento Circular Uniforme • A posição do objeto é sempre indicada por um vetor radial no movimento circular. r ry r r θ θ r rx • Vamos deduzir a velocidade escalar: r v 2 v = ω r (sin (ωt ) + cos (ωt )) v = ωr r r ry = r sin θ r r = rx xˆ + ry yˆ 2 θ = ωt r ry • ω é a velocidade angular do movimento. 2 2 • Se o movimento é uniforme, o ângulo varia linearmente com o tempo. rx = r cos θ Movimento Circular Uniforme r = rx2 + ry2 r r = r cos(ωt ) xˆ + r sin(ωt ) yˆ r r dr v= dt r ) v = −rω sin(ωt ) x + rω cos(ωt ) yˆ Movimento Circular Uniforme r ry r r θ r rx rx = r cos(ωt ) ry = r sin(ωt ) r rx Movimento Circular Uniforme • Podemos calcular a aceleração do movimento: Aceleração Centrípeta r ) v = −rω sin(ωt ) x + rω cos(ωt ) yˆ r r dv ac = dt r ac = −rω 2 cos(ωt ) xˆ − rω 2 sin(ωt ) yˆ ac = r 2ω 4 cos 2 (ωt ) + r 2ω 4 sin 2 (ωt ) r v r ry r r a r θ r rx 2 ac = ω r v = ωr ac = v2 r 6 Medindo a Aceleração Centrípeta Resultados Medidos • Aceleração Centrípeta (dinamômetro): 5,0m/s2. • Velocidade angular: 80rpm • Raio: 6cm + 2,5cm = 8,5cm 80 ⋅ 2π ω= = 8 .4 rad / s 60 8 .5 a c = ω 2 r = (8 . 4 ) 2 ⋅ = 6 .0 m / s 2 100 Até a próxima! 7
Baixar