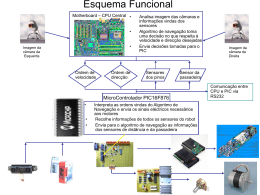
Instrumentação Eletrônica Professor: Luciano Fontes Cavalcante SENSOR DE VELOCIDADE Aluno: Jefferson Doolan Fernandes Conteúdo • • • • • • • • Introdução Principio de Funcionamento Material Utilizado Programa Embarcado Supervisorio Demonstração Conclusão Bibliografia Introdução • O projeto teve como base o artigo “Medição de velocidade com barreiras luminosas”. • Para o desenvolvimento foram necessárias modificações. - µcontrolador mais acessível. - Sensores mais acessíveis. - Interface IHM para melhor demonstração e utilização (desenvolvido no C++ Builder). Princípio de Funcionamento • Ao passar pelo primeiro sensor(interrupção do IR), inicia-se a contagem de tempo até que seja enterrompido o feixe seguinte. • Velocidade: Para D = 10cm e T = X ms; V= 10x10-5x3600 Km T x 10-3 hora Material Utilizado • PIC 16F877A no lugar do 87LPC762(que segundo o artigo é um µP!!!). • MAX232 – Comunicação serial; • Sensores Infravermelhos; • Regulador de tensão LM7805; • Além de resistores, cristal, capacitores… Montagem Montagem • Circuito dos Sensores Programa Embarcado MAIN BTFSS GOTO SENS1 MAIN MOVLW .250 MOVWF TEMPO1 COUNT NOP DECFSZ GOTO TEMPO1,F $-2 INCFSZ GOTO TEMPO $+2 INCF AUX BTFSS GOTO SENS2 COUNT MOVF BANK1 BTFSS GOTO BANK0 MOVWF TEMPO,W MOVF BANK1 BTFSS GOTO BANK0 MOVWF AUX,W END TXSTA,TRMT $-1 TXREG TXSTA,TRMT $-1 TXREG Supervisório Demonstração Conclusão • Não é tão dificil assim!!! Referências Bibliográficas • Help do C++ Builder; • Conectando o PIC Recursos Avançados,David José de Souza e Nicolás César Lavinia;
Baixar